- Z-передаточная функция и весовая последовательность цифрового блока. (Лекция 6)

Содержание
- 2. Согласно теореме о свертке выходная и входная последовательность связаны соотношением: Где последовательность χ[n] , которую называют
- 3. Передаточные функции цифрового регулятора, соответствующие типовым законам регулирования. В аналоговых регуляторах используются следующие типовые законы регулирования:
- 4. Z-передаточная функция цифрового ПИД-регулятора имеет вид: Преобразуя к одному знаменателю, получим: Для цифрового ПИ-регулятора Z-передаточная функция
- 6. Скачать презентацию
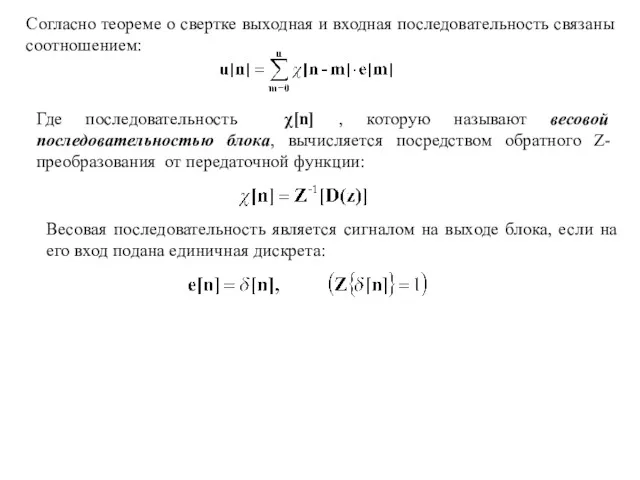
Согласно теореме о свертке выходная и входная последовательность связаны соотношением:
Где последовательность
Согласно теореме о свертке выходная и входная последовательность связаны соотношением:
Где последовательность
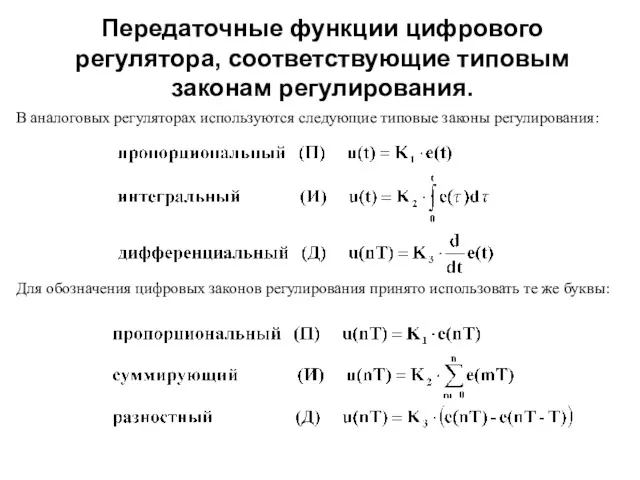
Передаточные функции цифрового регулятора, соответствующие типовым законам регулирования.
В аналоговых регуляторах используются
Передаточные функции цифрового регулятора, соответствующие типовым законам регулирования.
В аналоговых регуляторах используются
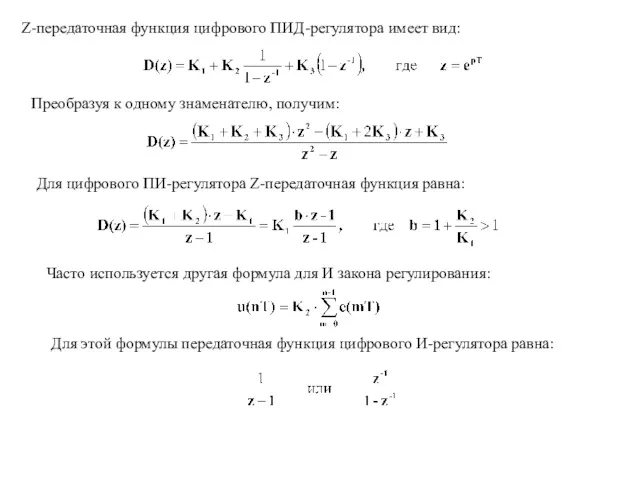
Z-передаточная функция цифрового ПИД-регулятора имеет вид:
Преобразуя к одному знаменателю, получим:
Для цифрового
Z-передаточная функция цифрового ПИД-регулятора имеет вид:
Преобразуя к одному знаменателю, получим:
Для цифрового
 Розробка схемотехнічного пристрою для обробки багаторозрядної двійкової інформації
Розробка схемотехнічного пристрою для обробки багаторозрядної двійкової інформації Автоматизоване розроблення веб-сайтів
Автоматизоване розроблення веб-сайтів Introducing the C# Class Types. Defining classes, objects and methods
Introducing the C# Class Types. Defining classes, objects and methods Программирование разветвляющихся алгоритмов. Начала программирования
Программирование разветвляющихся алгоритмов. Начала программирования Презентация Виды графических файлов
Презентация Виды графических файлов Подготовка файлов к печати. Форматы файлов, цветовые раскладки и разница между векторной и растровой графикой
Подготовка файлов к печати. Форматы файлов, цветовые раскладки и разница между векторной и растровой графикой Инструкция участия в вебинаре в системе веб-коммуникаций на базе IVA R
Инструкция участия в вебинаре в системе веб-коммуникаций на базе IVA R Task 3. Internet. Тренажёр ЕГЭ
Task 3. Internet. Тренажёр ЕГЭ Веб. 2.0. Його особливості. Соціальні сервіси Інтернету
Веб. 2.0. Його особливості. Соціальні сервіси Інтернету Рекуррентные соотношения, характерные для двух основных принципов организации рекурсии
Рекуррентные соотношения, характерные для двух основных принципов организации рекурсии Представление знаний – основа интеллектуальных систем. Лекция 15
Представление знаний – основа интеллектуальных систем. Лекция 15 Минимизация логических функций
Минимизация логических функций Компьютерные вирусы и антивирусные программы. Типы компьютерных вирусов
Компьютерные вирусы и антивирусные программы. Типы компьютерных вирусов Картографическое сопровождение поиска
Картографическое сопровождение поиска Лицензионное программное обеспечение (ПО)
Лицензионное программное обеспечение (ПО) Бесплатные сервисы для дизайна
Бесплатные сервисы для дизайна Подготовка документов в текстовом редакторе
Подготовка документов в текстовом редакторе Работа со шрифтами
Работа со шрифтами САПР Autocad 2015. Команды редактирования
САПР Autocad 2015. Команды редактирования Устройство компьютера. История развития вычислительной техники
Устройство компьютера. История развития вычислительной техники Разбор задач школьного тура 1-4
Разбор задач школьного тура 1-4 Информационная безопасность. Комплексная модель безопасности. (Лекция 13)
Информационная безопасность. Комплексная модель безопасности. (Лекция 13) Fundamentals of Programming (C++). Lecture 10
Fundamentals of Programming (C++). Lecture 10 Определение количества информации
Определение количества информации Использование 3D для обогащения опыта пользователя в ПО
Использование 3D для обогащения опыта пользователя в ПО Отчет по продвижению в социальных сетях Oson
Отчет по продвижению в социальных сетях Oson Моделирование в проектировании многофункциональных инфокоммуникационных систем и систем связи
Моделирование в проектировании многофункциональных инфокоммуникационных систем и систем связи Создание блога
Создание блога