- Знакомство с TrikStudio

Содержание
- 2. План занятия Знакомство с TrikStudio Введение в JavaScript Основные объекты и определения в JavaScript Функции в
- 3. Группа в Telegram Наставники НТИ. ИРС https://goo.gl/qcsJ5J
- 4. TrikStudio. Создание программы (1) Создаём новый проект в TrikStudio
- 5. TrikStudio. Создание программы (2) Перетаскиваем блок «Конец» на рабочее пространство Соединяем блок "Начало", располо-женный на рабочем
- 6. TrikStudio. Создание программы (3) В выпадающем меню рядом с кнопкой TRIK выбираем "Генерация JavaScript“ Выбираем пункт
- 7. TrikStudio. Редактор кода Кнопки запуска и остановки программы; Выбор режима запуска (2D эмуляция или запуск на
- 8. TrikStudio. Окно эмуляции (1) Инструменты редактирования поля: Курсор; Добавить стену; Добавить прямую линию; Добавить кривую; Добавить
- 9. TrikStudio. Окно эмуляции (2) Эмуляция экрана и кнопок управления роботом; Конфигурация датчиков; Конфигурация моторов; Настройка физики;
- 10. TrikStudio. Датчики Ультразвуковой датчик расстояния, цифровой. Подключается к портам D1, D2. Датчик линии (камера). Подключается к
- 11. TrikStudio. Изменение положения Расположение робота и датчиков можно менять путём "перетаскивания" курсором; Их направления можно изменить,
- 12. TrikStudio. Расположение датчиков Геометрия датчиков (проекция) должна практически полностью находиться на проекции робота, иначе будут сложности
- 13. Набор ТРИК. Контроллер
- 14. Контроллер ТРИК
- 15. Набор ТРИК. Подключения Изменить конфигурацию подключаемых датчиков можно на контроллере в файле system-config.xml
- 16. Введение в JavaScript. Типы данных Узнать тип данных можно оператором typeof: print (typeof 'abc') print (typeof
- 17. Javascript. Числа. Методы и функции
- 18. JavaScript. Строки. Методы, свойства
- 19. JavaScript. Массивы. Методы, свойства
- 20. Введение в JavaScript. Операции
- 21. Введение в JavaScript. Переменные (1) JavaScript – регистрозависимый язык програм-мирования с динамической типизацией данных Переменные num
- 22. Введение в JavaScript. Переменные (2) Области видимости переменных Объявление переменных через var создает переменную с доступностью
- 23. Введение в JavaScript. Переменные (3) Области видимости переменных (пример)
- 24. Введение в JavaScript. Комментарии Однострочный комментарий: // Многострочный комментарий: /* … */ Закрывающая часть многострочного комментария
- 25. Основные объекты ТРИК. Brick
- 26. Основные объекты ТРИК. Script
- 27. Основные объекты ТРИК. Mailbox
- 28. Основные объекты ТРИК. Math
- 29. Вывод информации В виртуальной среде TrikStudio (консоль): print ('Профиль ИРС') На экран контроллера ТРИК: brick.display().addLabel('Профиль ИРС',10,20)
- 30. Модель робота для финала НТИ ИРС На финале НТИ в профиле ИРС используется мобильная робототехническая платформа
- 31. Переменные с параметрами робота Создадим переменную robot типа "объект" для определения констант, относящихся к виртуальной модели
- 32. Переменные для управления роботом Создадим переменные для более простого и "быстрого" доступа к функциям управления робота:
- 33. Условные операторы JavaScript If / else if / else if (выражение){ инструкции } [else if] {
- 34. Циклы в JavaScript Безусловный цикл: for (инициализация; проверка; инкремент/декремент){ инструкции } Условный цикл: while ( )
- 35. Перемещение робота на расстояние Проезд роботом расстояния в 1 оборот колеса: C (длина окружности)
- 36. Перемещение робота на расстояние. Пример Например, надо проехать по прямой 52.5 см distance = 52.5 //
- 37. Перемещение робота на расстояние. Функции function cm2cpr (cm) {return (cm / (pi * robot.wheelD)) * robot.cpr
- 38. Повороты робота на заданный угол Варианты поворотов робота с дифференциальным приводом. vR vL vR=0 vL vL
- 39. Повороты робота на заданный угол Пример расчета разворота на 90 градусов (angle):
- 40. Повороты робота в TrikStudio Поворот в ТрикСтудии: Вперед (17.5/2) Поворот Назад (17.5/2) На реальном роботе такие
- 41. Повороты робота на заданный угол. Псевдокод функция поворота (угол){ длина_пути = ((колея * угол) / (D_колеса
- 42. Точное перемещение робота (часть 1) Прямолинейное движение с плавным стартом и финишем разгон торможение движение Зоны
- 43. Точное перемещение робота (часть 2) Необходимые данные для функции: Длина пути Максимальная мощность моторов Начальная мощность
- 44. Точное перемещение робота. Псевдокод функция плавное_движение (cm, v){ v = v == undefined ? robot.v :
- 45. Гироскоп MEMS. Описание (1) MEMS (МЭМС) – микроэлектромеханические системы, объединяющие в себе миркоэлектронные и микромеханические системы
- 46. Гироскоп MEMS. Описание (2)
- 47. Гироскоп в контроллере ТРИК Диапазон работы гироскопа в ТРИК находится в пределах -180 … +180 градусов.
- 48. Гироскоп. Обработка в JavaScript Инициализация: brick.gyroscope().calibrate(N) script.wait(N + 1000) в ТрикСтудии N = 5000 мс, в
- 49. Гироскоп. Использование в JavaScript инициализация гироскопа; // функция поворота на абсолютный угол по гироскопу функция поворот_по_гироскопу
- 50. Пропорциональный регулятор. Описание Пропорциональный регулятор – устройство (алгоритм), оказывающее управляющее воздействие на объект управления пропорционально его
- 51. Пропорциональный регулятор. Схема w – требуемое значение параметра системы (уставка) P – сумматор обратной связи и
- 52. Пропорциональный регулятор. Псевдокод Движение робота с выравниваем по энкодерам на П-регуляторе: Kp = 2 // Kp
- 53. Работа с файлами на ТРИК Разберем примеры из задач сезона 2017/2018: Задача 6.3.1. Одометрия (файл данных
- 54. Работа с файлами на ТРИК. Чтение Чтение данных из файла: data = script.readAll('c:/nti/data1.txt') в итоге 'data'
- 55. Работа с файлами на ТРИК. Обработка данных (1) line0 = data[0].trim().split(' ') N = parseInt(line0[0]) t
- 56. Работа с файлами на ТРИК. Обработка данных (2) lines = script.readAll('c:/temp/data2.txt') polygon_nums = parseInt(lines[0]) // кол-во
- 57. Работа с файлами на ТРИК. Обработка данных (3) line = 4 // номер строки в файле
- 58. Работа с файлами на JavaScript. Задания Файлы с данными содержат 2 строки: Размер картинки в пикселях
- 59. TrikStudio. Модель мира (1) Для сохранения или загрузки "модели мира" в TrikStudio нужно кликнуть правой кнопкой
- 60. TrikStudio Модель мира (2) Структуры мира (стены, линии, окружности и т.д.); Текущая позиция робота; Датчики и
- 61. Оффлайн презентации по ИРС https://goo.gl/UVapPu Фильтрация значений датчиков Построение карты. Локализация Счисление пути в задачах навигации
- 62. ОНТИ ИРС. Финал 2016/17 Задачи: Локализация; Построение пути; Считывание штрихкода. Подзадачи: Движение прямо; Повороты на 90°;
- 63. ОНТИ ИРС. Финал 2017/18 Изменения: Штрихкоды заменены ARTag маркерами; Добавлена задача на поиск обрушений; Добавлено условие
- 64. Контакты Алексей Клячин www.robonest.ru Михаил Фадеев m.fadeew@gmail.com
- 66. Скачать презентацию
План занятия
Знакомство с TrikStudio
Введение в JavaScript
Основные объекты и определения в JavaScript
Функции
План занятия
Знакомство с TrikStudio
Введение в JavaScript
Основные объекты и определения в JavaScript
Функции
Группа в Telegram
Наставники НТИ. ИРС
https://goo.gl/qcsJ5J
Группа в Telegram
Наставники НТИ. ИРС
https://goo.gl/qcsJ5J
TrikStudio. Создание программы (1)
Создаём новый проект в TrikStudio
TrikStudio. Создание программы (1)
Создаём новый проект в TrikStudio
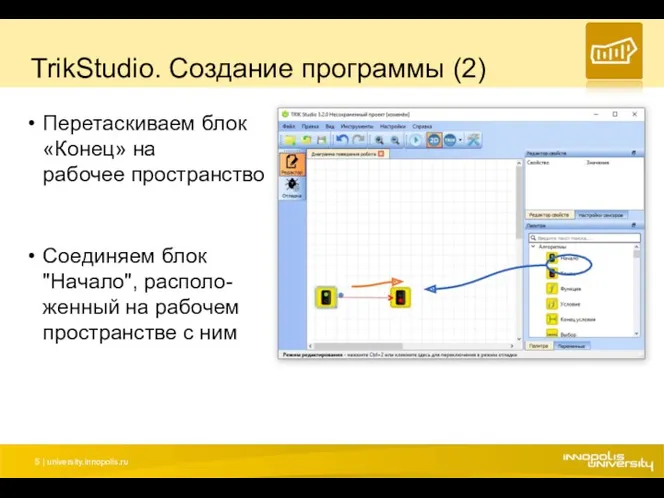
TrikStudio. Создание программы (2)
Перетаскиваем блок «Конец» на
рабочее пространство
Соединяем блок "Начало",
TrikStudio. Создание программы (2)
Перетаскиваем блок «Конец» на
рабочее пространство
Соединяем блок "Начало",
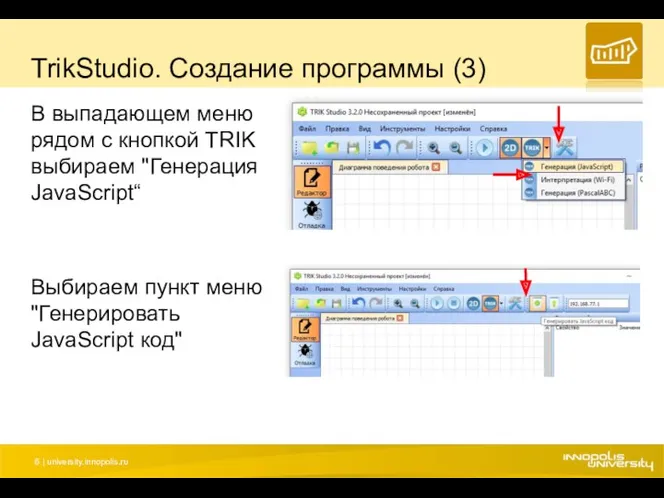
TrikStudio. Создание программы (3)
В выпадающем меню рядом с кнопкой TRIK выбираем
TrikStudio. Создание программы (3)
В выпадающем меню рядом с кнопкой TRIK выбираем
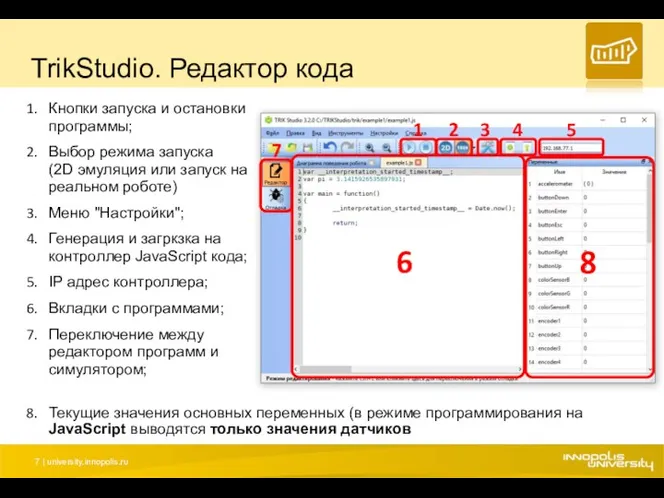
TrikStudio. Редактор кода
Кнопки запуска и остановки программы;
Выбор режима запуска
(2D эмуляция
TrikStudio. Редактор кода
Кнопки запуска и остановки программы;
Выбор режима запуска
(2D эмуляция
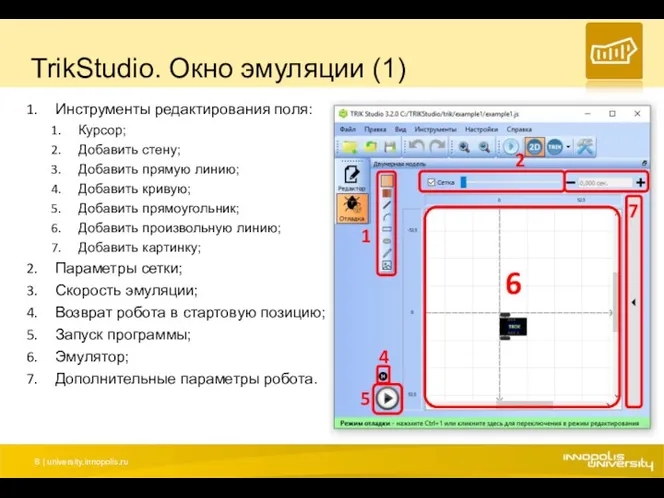
TrikStudio. Окно эмуляции (1)
Инструменты редактирования поля:
Курсор;
Добавить стену;
Добавить прямую линию;
Добавить кривую;
Добавить прямоугольник;
Добавить
TrikStudio. Окно эмуляции (1)
Инструменты редактирования поля:
Курсор;
Добавить стену;
Добавить прямую линию;
Добавить кривую;
Добавить прямоугольник;
Добавить
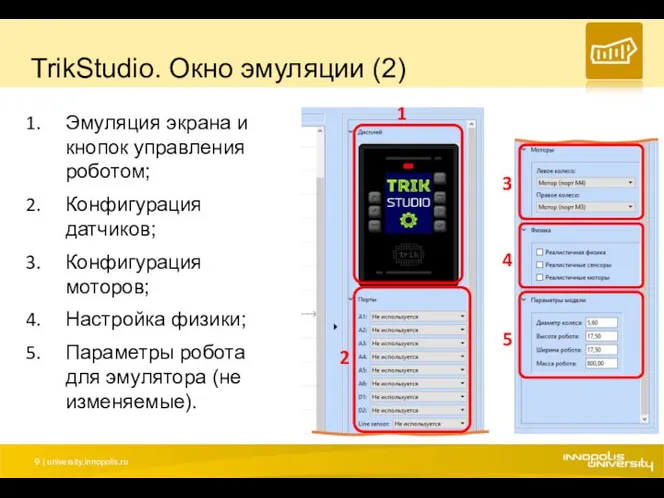
TrikStudio. Окно эмуляции (2)
Эмуляция экрана и кнопок управления роботом;
Конфигурация датчиков;
Конфигурация моторов;
Настройка
TrikStudio. Окно эмуляции (2)
Эмуляция экрана и кнопок управления роботом;
Конфигурация датчиков;
Конфигурация моторов;
Настройка

TrikStudio. Датчики
Ультразвуковой датчик расстояния, цифровой. Подключается к портам D1, D2.
Датчик линии
TrikStudio. Датчики
Ультразвуковой датчик расстояния, цифровой. Подключается к портам D1, D2.
Датчик линии
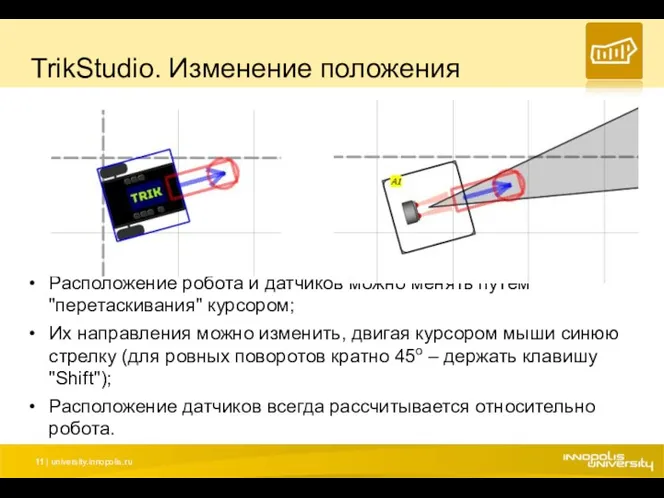
TrikStudio. Изменение положения
Расположение робота и датчиков можно менять путём "перетаскивания" курсором;
Их
TrikStudio. Изменение положения
Расположение робота и датчиков можно менять путём "перетаскивания" курсором;
Их
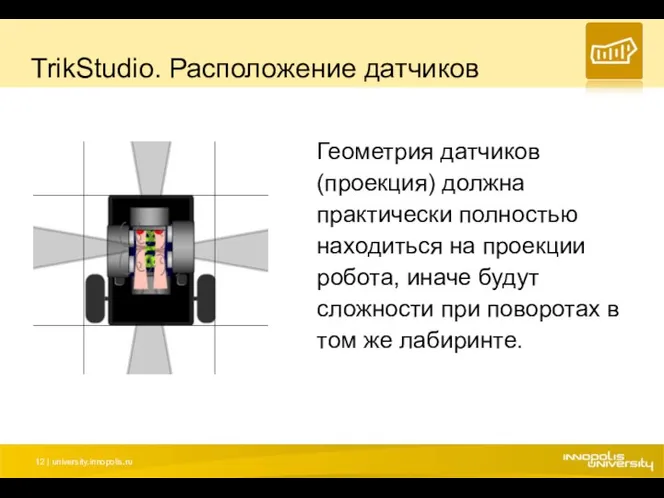
TrikStudio. Расположение датчиков
Геометрия датчиков (проекция) должна практически полностью находиться на проекции
TrikStudio. Расположение датчиков
Геометрия датчиков (проекция) должна практически полностью находиться на проекции
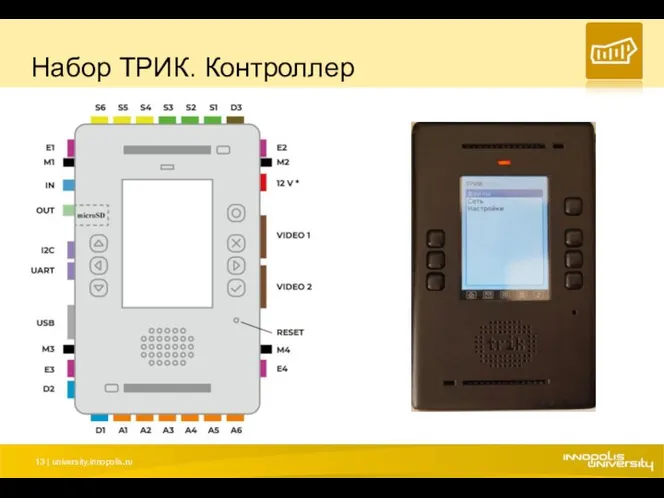
Набор ТРИК. Контроллер
Набор ТРИК. Контроллер
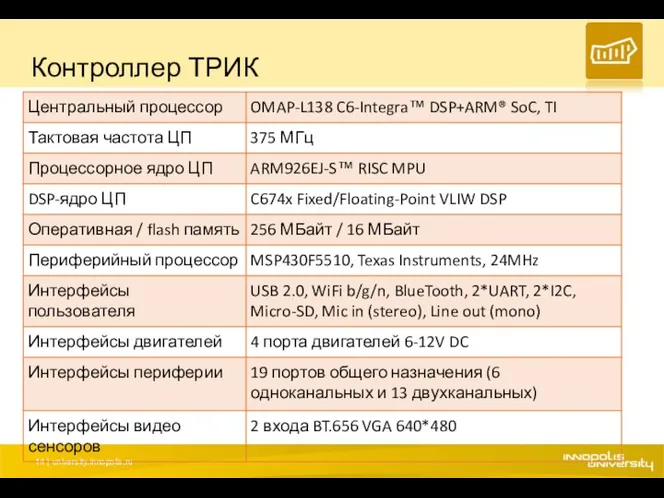
Контроллер ТРИК
Контроллер ТРИК
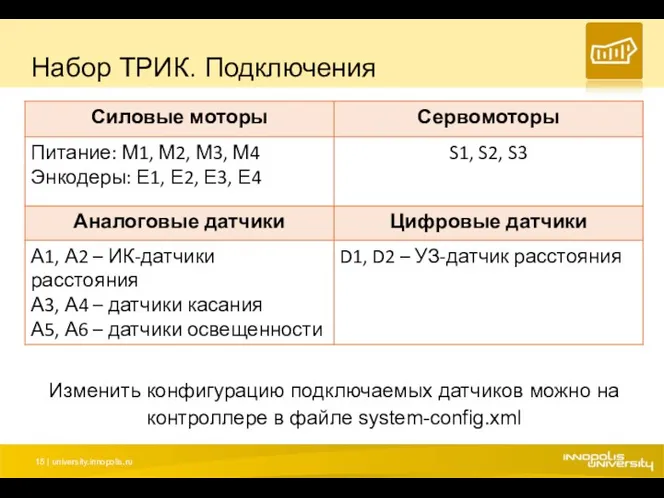
Набор ТРИК. Подключения
Изменить конфигурацию подключаемых датчиков можно на контроллере в файле
Набор ТРИК. Подключения
Изменить конфигурацию подключаемых датчиков можно на контроллере в файле
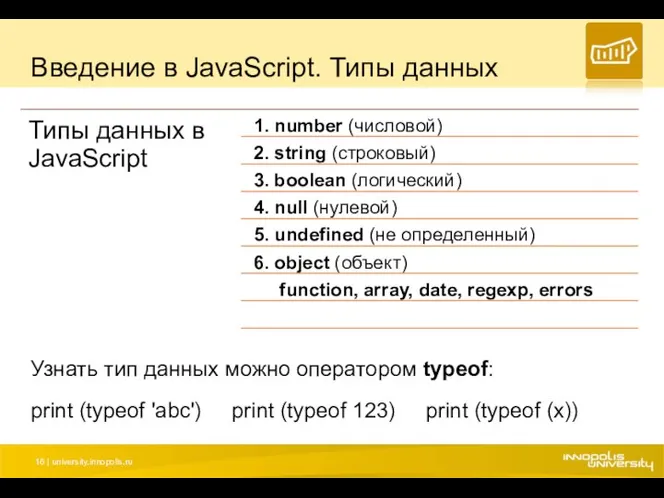
Введение в JavaScript. Типы данных
Узнать тип данных можно оператором typeof:
print (typeof
Введение в JavaScript. Типы данных
Узнать тип данных можно оператором typeof:
print (typeof
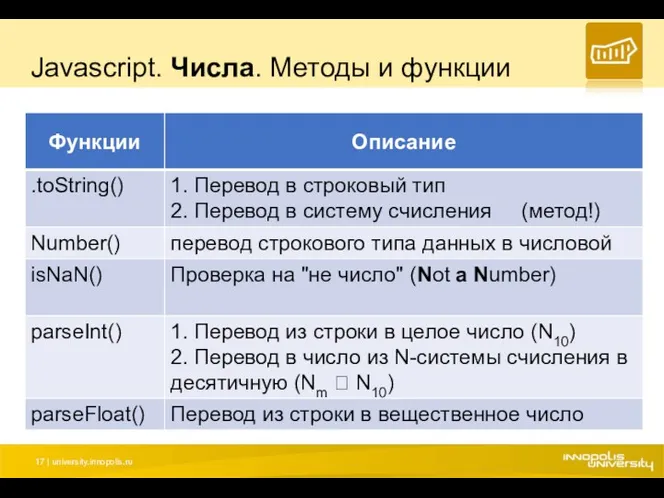
Javascript. Числа. Методы и функции
Javascript. Числа. Методы и функции
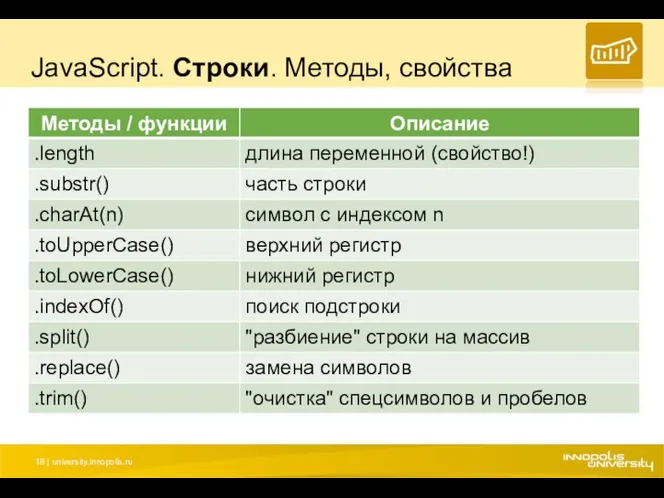
JavaScript. Строки. Методы, свойства
JavaScript. Строки. Методы, свойства
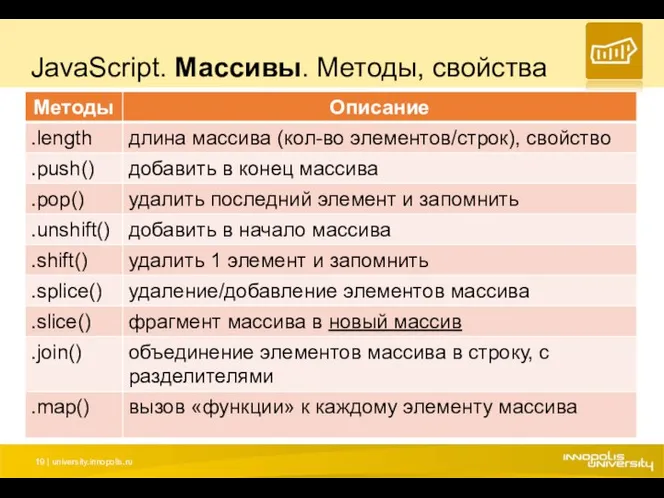
JavaScript. Массивы. Методы, свойства
JavaScript. Массивы. Методы, свойства
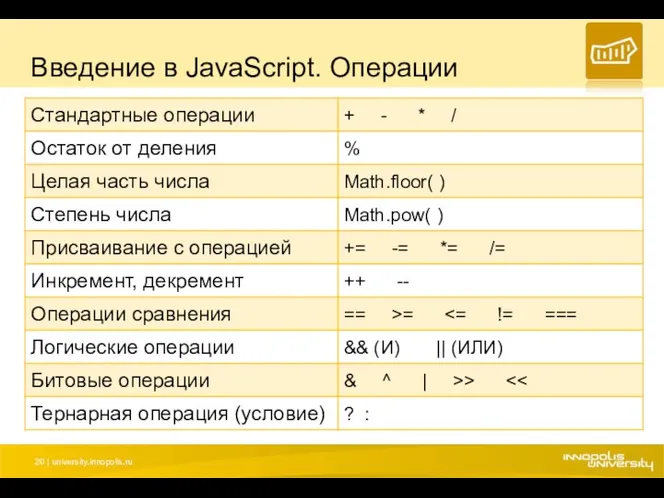
Введение в JavaScript. Операции
Введение в JavaScript. Операции
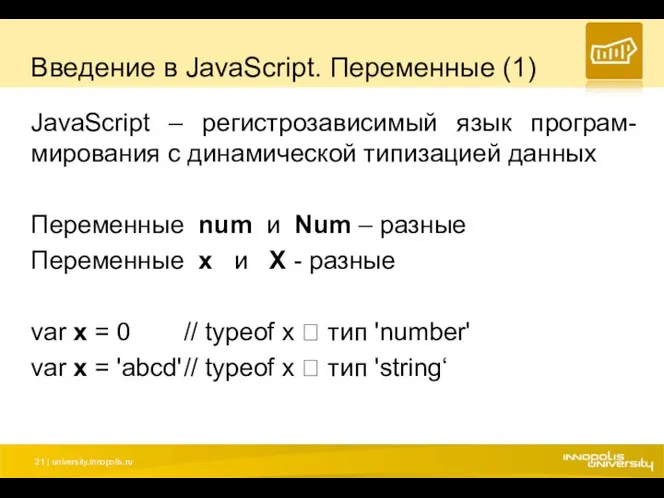
Введение в JavaScript. Переменные (1)
JavaScript – регистрозависимый язык програм-мирования с динамической
Введение в JavaScript. Переменные (1)
JavaScript – регистрозависимый язык програм-мирования с динамической
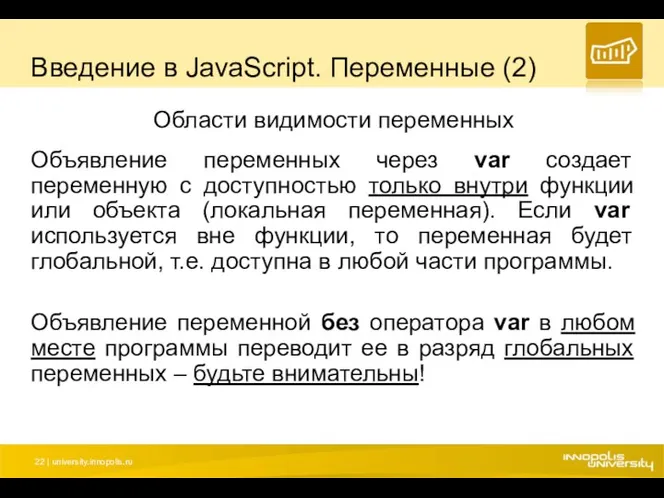
Введение в JavaScript. Переменные (2)
Области видимости переменных
Объявление переменных через var
Введение в JavaScript. Переменные (2)
Области видимости переменных
Объявление переменных через var
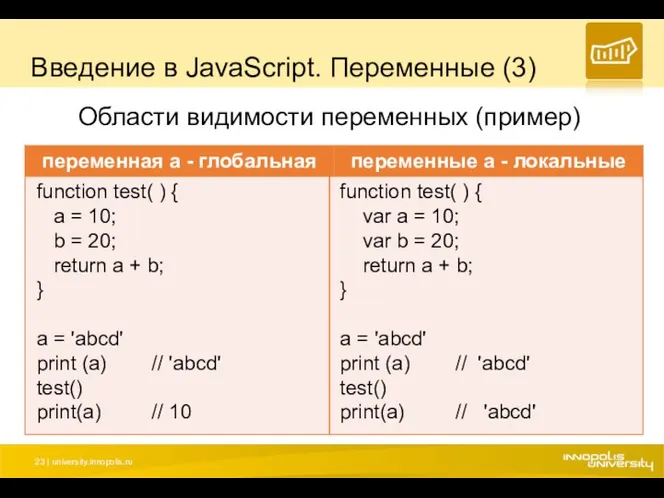
Введение в JavaScript. Переменные (3)
Области видимости переменных (пример)
Введение в JavaScript. Переменные (3)
Области видимости переменных (пример)
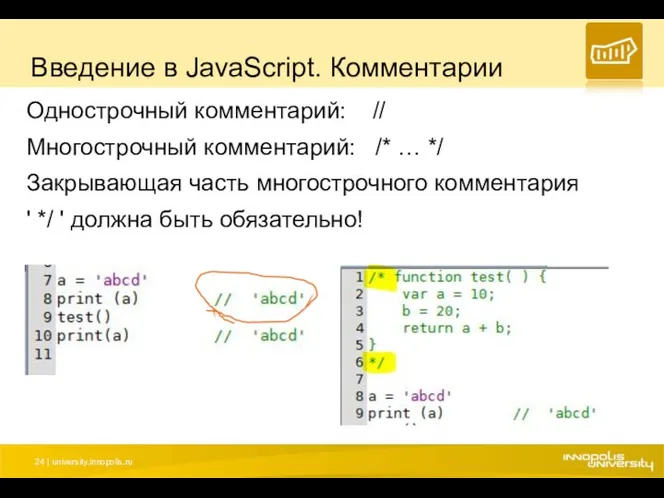
Введение в JavaScript. Комментарии
Однострочный комментарий: //
Многострочный комментарий: /* … */
Закрывающая часть
Введение в JavaScript. Комментарии
Однострочный комментарий: //
Многострочный комментарий: /* … */
Закрывающая часть

Основные объекты ТРИК. Brick
Основные объекты ТРИК. Brick
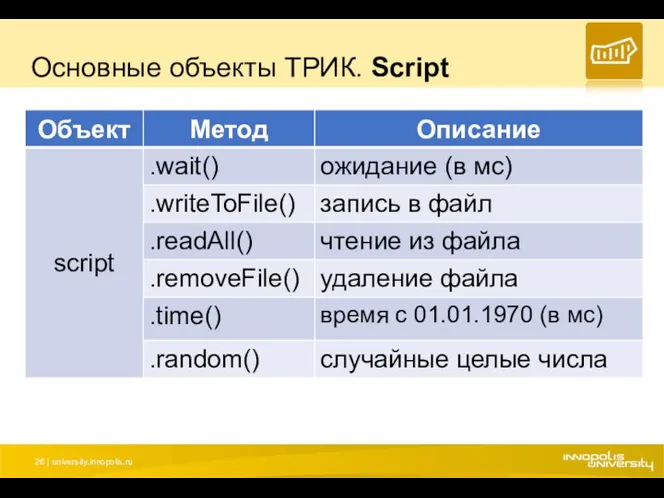
Основные объекты ТРИК. Script
Основные объекты ТРИК. Script
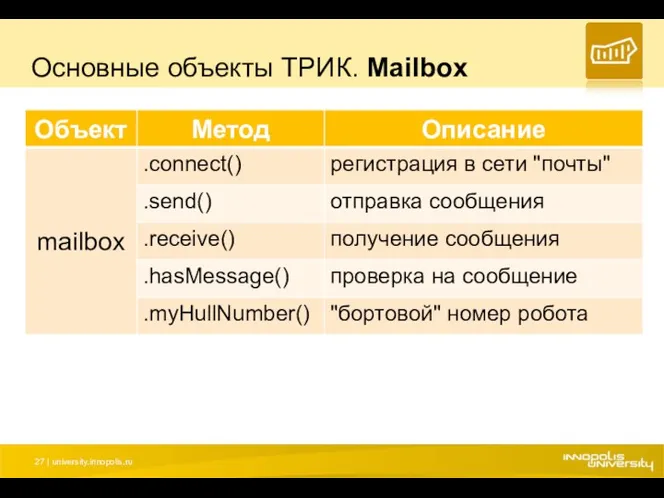
Основные объекты ТРИК. Mailbox
Основные объекты ТРИК. Mailbox
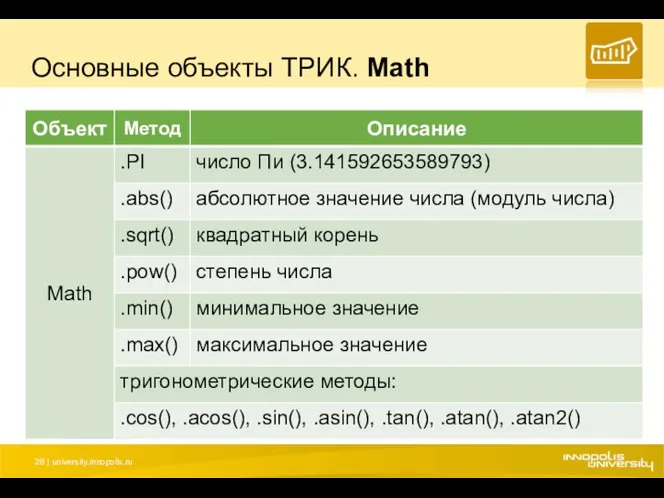
Основные объекты ТРИК. Math
Основные объекты ТРИК. Math
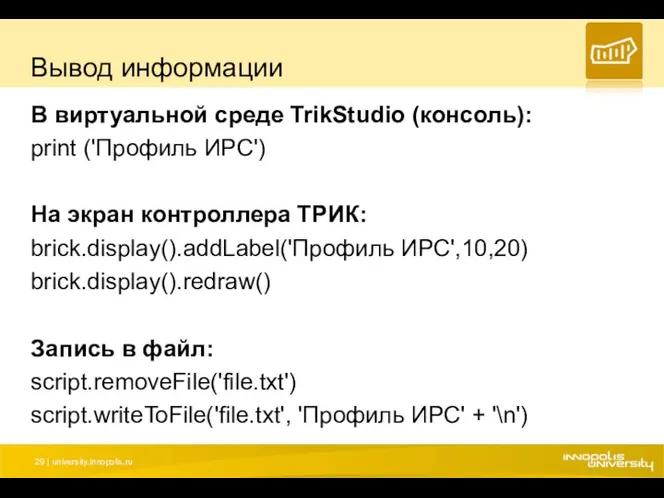
Вывод информации
В виртуальной среде TrikStudio (консоль):
print ('Профиль ИРС')
На экран контроллера ТРИК:
brick.display().addLabel('Профиль
Вывод информации
В виртуальной среде TrikStudio (консоль):
print ('Профиль ИРС')
На экран контроллера ТРИК:
brick.display().addLabel('Профиль
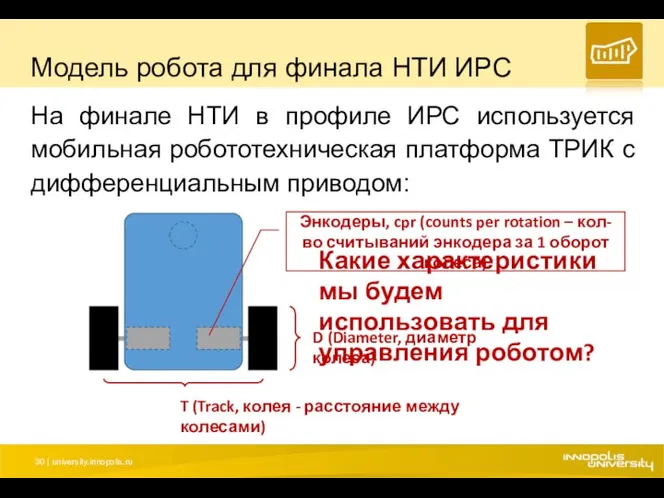
Модель робота для финала НТИ ИРС
На финале НТИ в профиле ИРС
Модель робота для финала НТИ ИРС
На финале НТИ в профиле ИРС
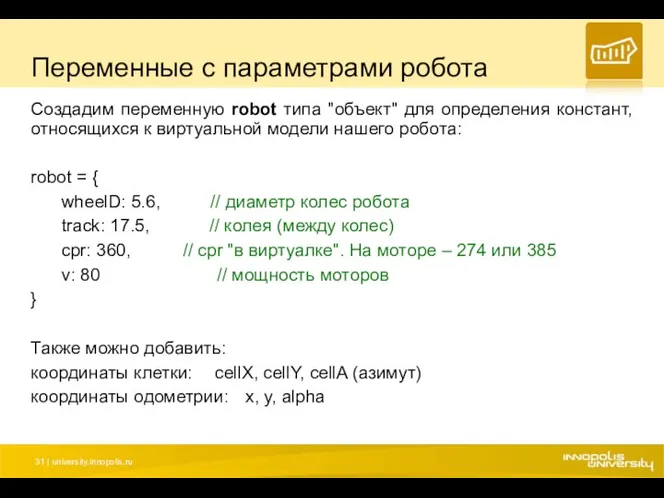
Переменные с параметрами робота
Создадим переменную robot типа "объект" для определения констант,
Переменные с параметрами робота
Создадим переменную robot типа "объект" для определения констант,
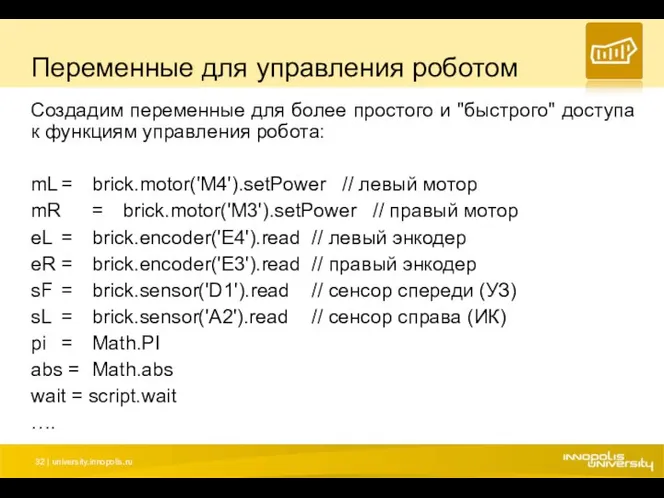
Переменные для управления роботом
Создадим переменные для более простого и "быстрого" доступа
Переменные для управления роботом
Создадим переменные для более простого и "быстрого" доступа
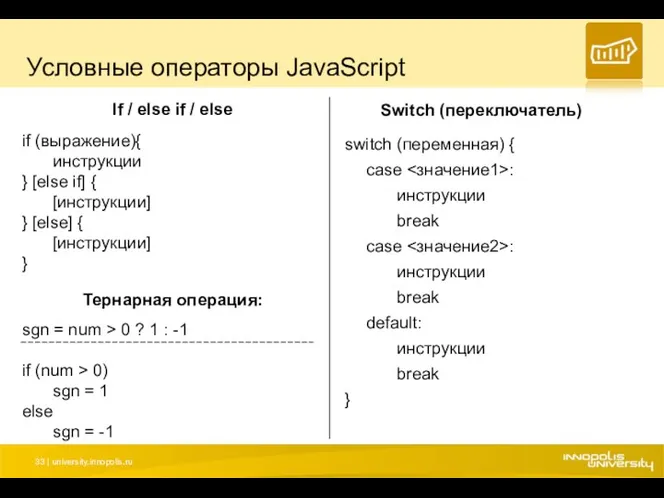
Условные операторы JavaScript
If / else if / else
if (выражение){
инструкции
} [else if]
Условные операторы JavaScript
If / else if / else
if (выражение){
инструкции
} [else if]
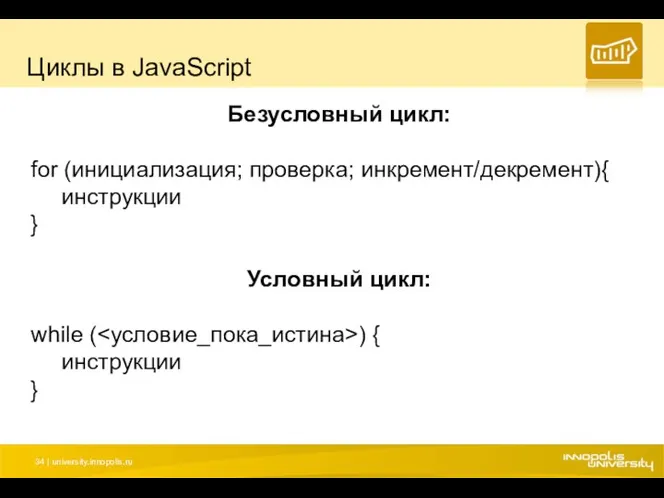
Циклы в JavaScript
Безусловный цикл:
for (инициализация; проверка; инкремент/декремент){
инструкции
}
Условный цикл:
while (<условие_пока_истина>) {
инструкции
}
Циклы в JavaScript
Безусловный цикл:
for (инициализация; проверка; инкремент/декремент){
инструкции
}
Условный цикл:
while (<условие_пока_истина>) {
инструкции
}
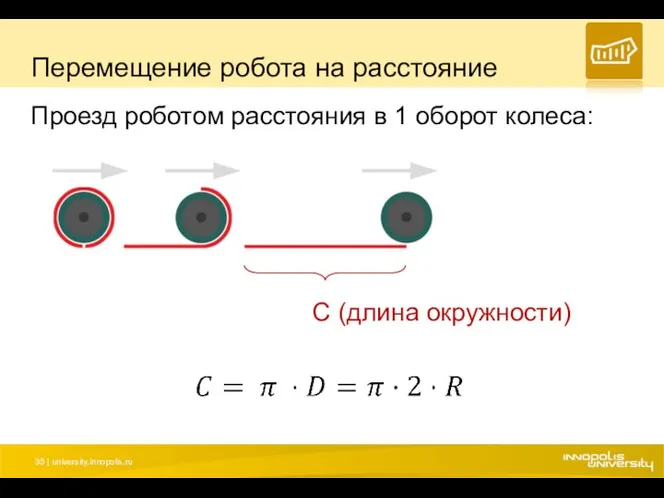
Перемещение робота на расстояние
Проезд роботом расстояния в 1 оборот колеса:
C (длина
Перемещение робота на расстояние
Проезд роботом расстояния в 1 оборот колеса:
C (длина
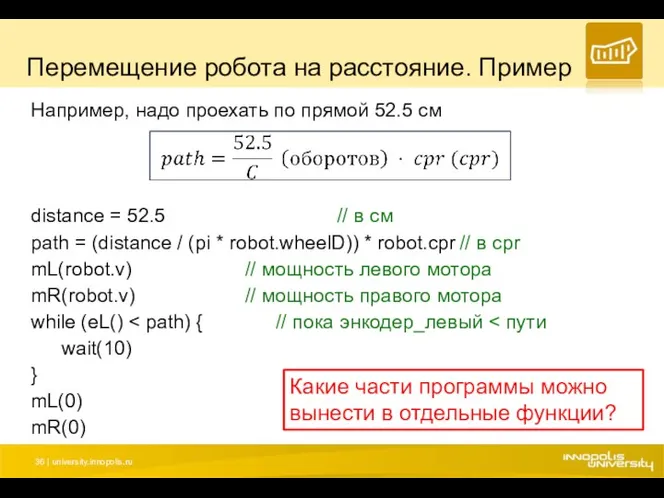
Перемещение робота на расстояние. Пример
Например, надо проехать по прямой 52.5 см
distance
Перемещение робота на расстояние. Пример
Например, надо проехать по прямой 52.5 см
distance
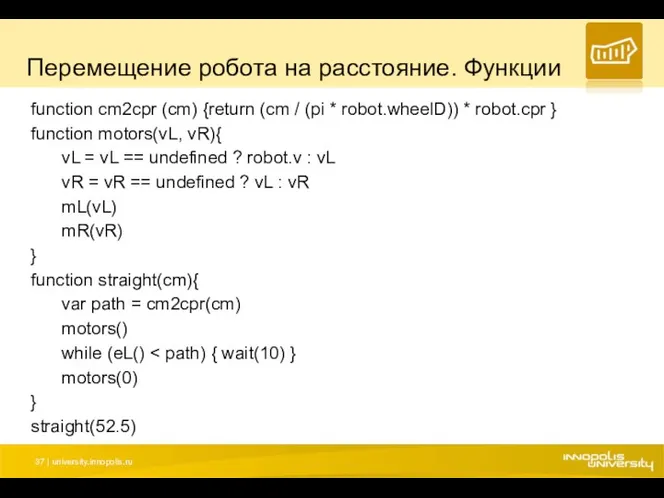
Перемещение робота на расстояние. Функции
function cm2cpr (cm) {return (cm / (pi
Перемещение робота на расстояние. Функции
function cm2cpr (cm) {return (cm / (pi
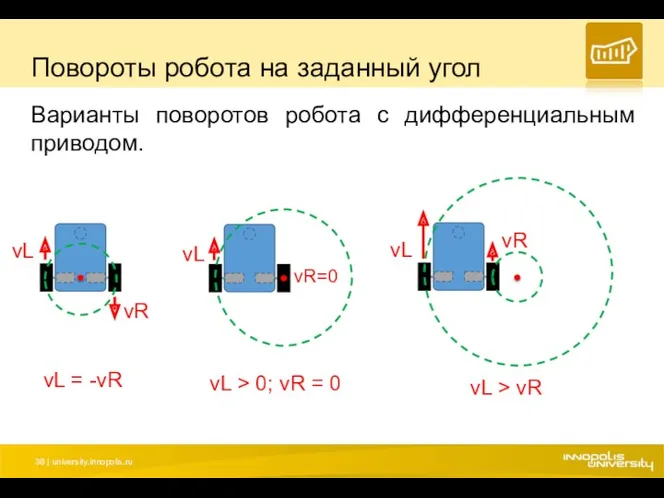
Повороты робота на заданный угол
Варианты поворотов робота с дифференциальным приводом.
vR
vL
vR=0
vL
vL =
Повороты робота на заданный угол
Варианты поворотов робота с дифференциальным приводом.
vR
vL
vR=0
vL
vL =
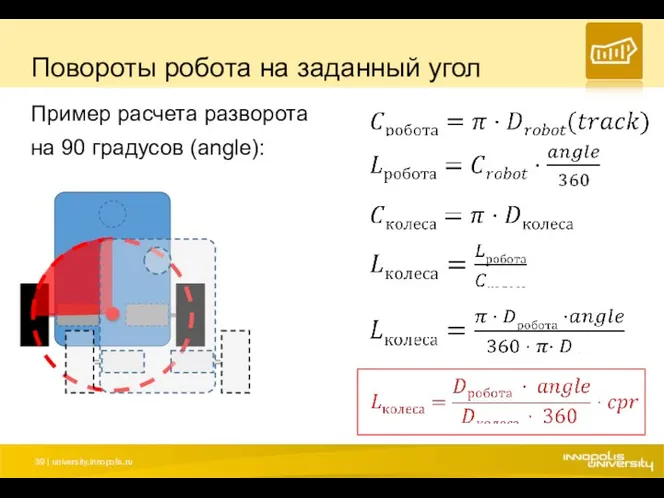
Повороты робота на заданный угол
Пример расчета разворота
на 90 градусов (angle):
Повороты робота на заданный угол
Пример расчета разворота
на 90 градусов (angle):
Повороты робота в TrikStudio
Поворот в ТрикСтудии:
Вперед (17.5/2)
Поворот
Назад (17.5/2)
На реальном роботе
Повороты робота в TrikStudio
Поворот в ТрикСтудии:
Вперед (17.5/2)
Поворот
Назад (17.5/2)
На реальном роботе
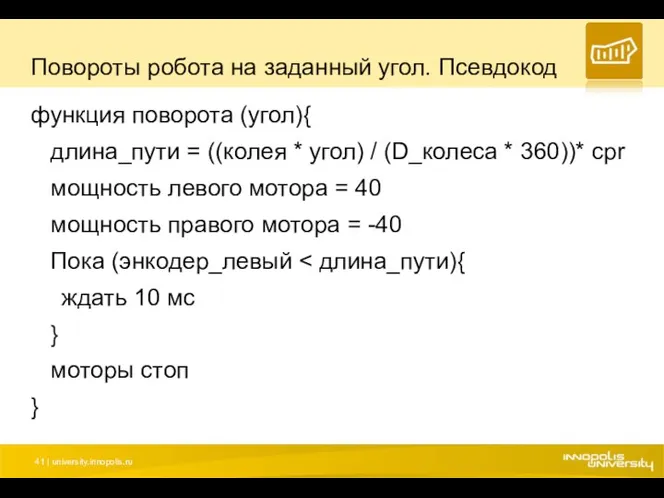
Повороты робота на заданный угол. Псевдокод
функция поворота (угол){
длина_пути = ((колея
Повороты робота на заданный угол. Псевдокод
функция поворота (угол){
длина_пути = ((колея
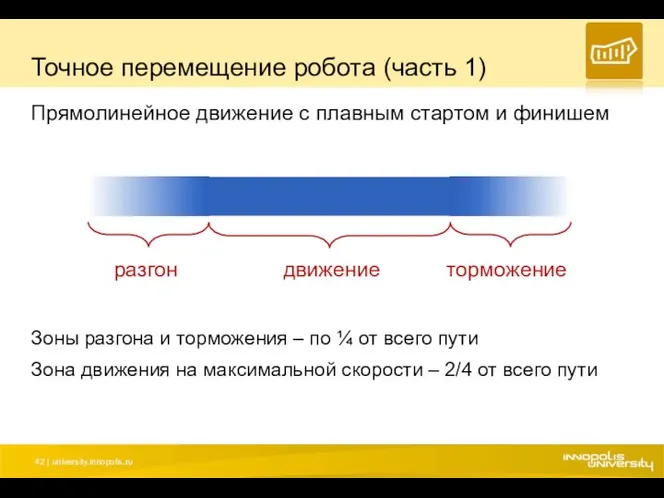
Точное перемещение робота (часть 1)
Прямолинейное движение с плавным стартом и финишем
разгон
торможение
движение
Зоны
Точное перемещение робота (часть 1)
Прямолинейное движение с плавным стартом и финишем
разгон
торможение
движение
Зоны
Точное перемещение робота (часть 2)
Необходимые данные для функции:
Длина пути
Максимальная мощность моторов
Начальная
Точное перемещение робота (часть 2)
Необходимые данные для функции:
Длина пути
Максимальная мощность моторов
Начальная
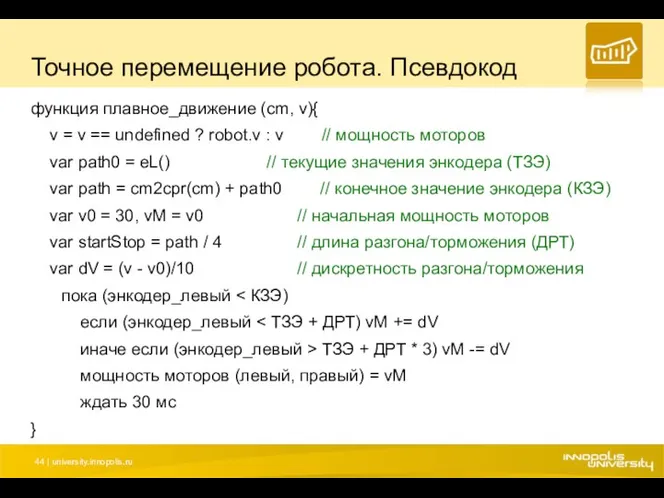
Точное перемещение робота. Псевдокод
функция плавное_движение (cm, v){
v = v ==
Точное перемещение робота. Псевдокод
функция плавное_движение (cm, v){
v = v ==
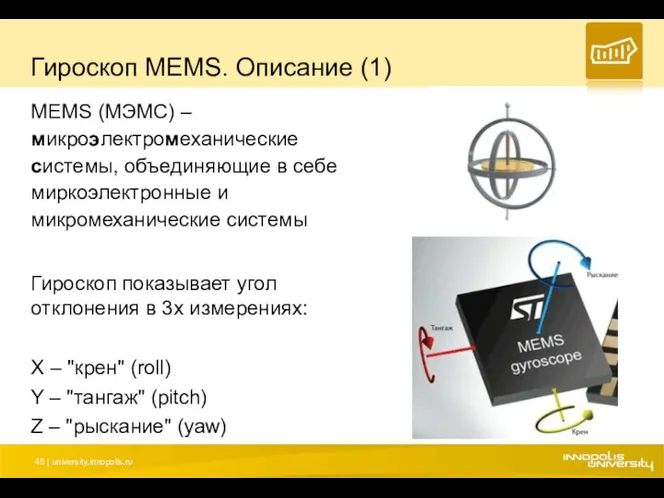
Гироскоп MEMS. Описание (1)
MEMS (МЭМС) – микроэлектромеханические системы, объединяющие в себе
Гироскоп MEMS. Описание (1)
MEMS (МЭМС) – микроэлектромеханические системы, объединяющие в себе
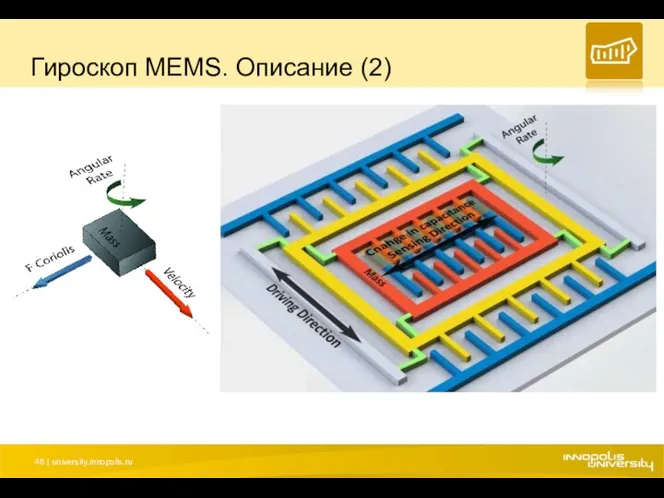
Гироскоп MEMS. Описание (2)
Гироскоп MEMS. Описание (2)

Гироскоп в контроллере ТРИК
Диапазон работы гироскопа в ТРИК находится в пределах
Гироскоп в контроллере ТРИК
Диапазон работы гироскопа в ТРИК находится в пределах
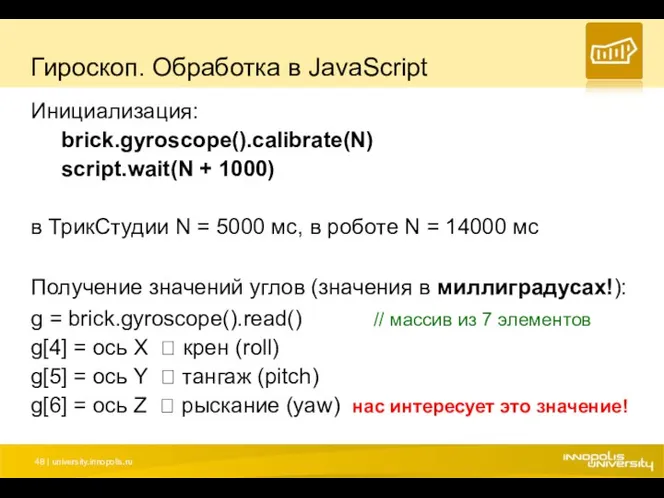
Гироскоп. Обработка в JavaScript
Инициализация:
brick.gyroscope().calibrate(N)
script.wait(N + 1000)
в ТрикСтудии N = 5000 мс,
Гироскоп. Обработка в JavaScript
Инициализация:
brick.gyroscope().calibrate(N)
script.wait(N + 1000)
в ТрикСтудии N = 5000 мс,
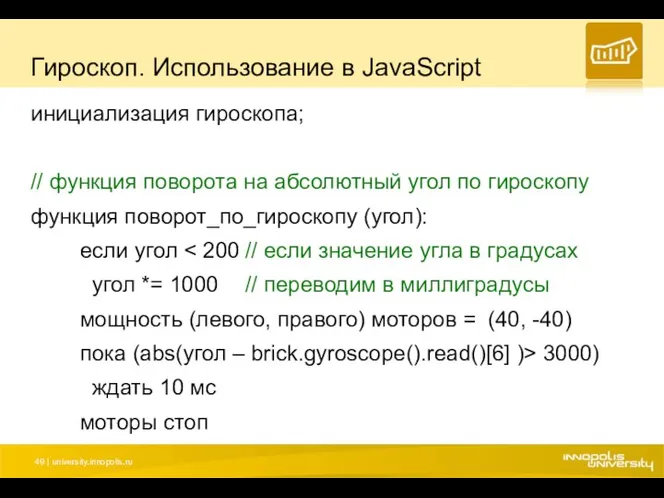
Гироскоп. Использование в JavaScript
инициализация гироскопа;
// функция поворота на абсолютный угол по
Гироскоп. Использование в JavaScript
инициализация гироскопа;
// функция поворота на абсолютный угол по
Пропорциональный регулятор. Описание
Пропорциональный регулятор – устройство (алгоритм), оказывающее управляющее воздействие на
Пропорциональный регулятор. Описание
Пропорциональный регулятор – устройство (алгоритм), оказывающее управляющее воздействие на
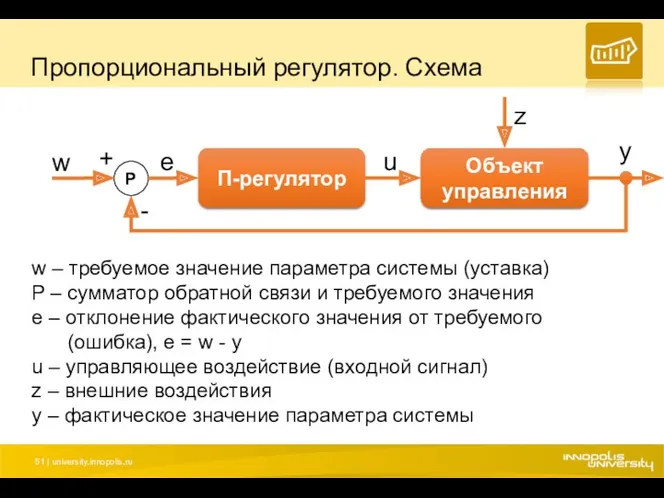
Пропорциональный регулятор. Схема
w – требуемое значение параметра системы (уставка)
P –
Пропорциональный регулятор. Схема
w – требуемое значение параметра системы (уставка)
P –
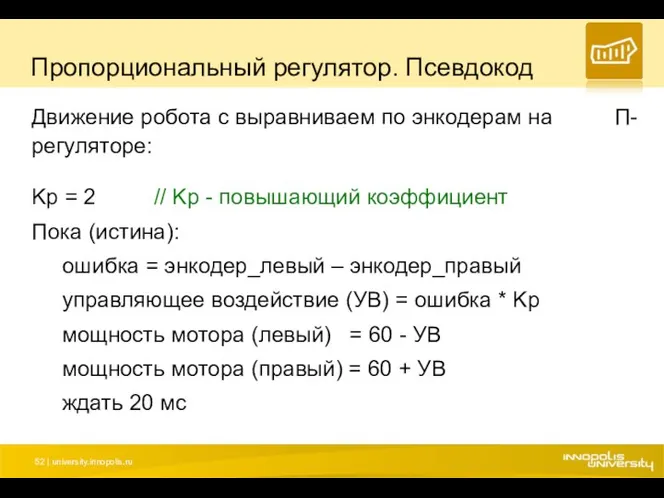
Пропорциональный регулятор. Псевдокод
Движение робота с выравниваем по энкодерам на П-регуляторе:
Kp =
Пропорциональный регулятор. Псевдокод
Движение робота с выравниваем по энкодерам на П-регуляторе:
Kp =
Работа с файлами на ТРИК
Разберем примеры из задач сезона 2017/2018: Задача 6.3.1.
Работа с файлами на ТРИК
Разберем примеры из задач сезона 2017/2018: Задача 6.3.1.
Работа с файлами на ТРИК. Чтение
Чтение данных из файла:
data = script.readAll('c:/nti/data1.txt')
в
Работа с файлами на ТРИК. Чтение
Чтение данных из файла:
data = script.readAll('c:/nti/data1.txt')
в
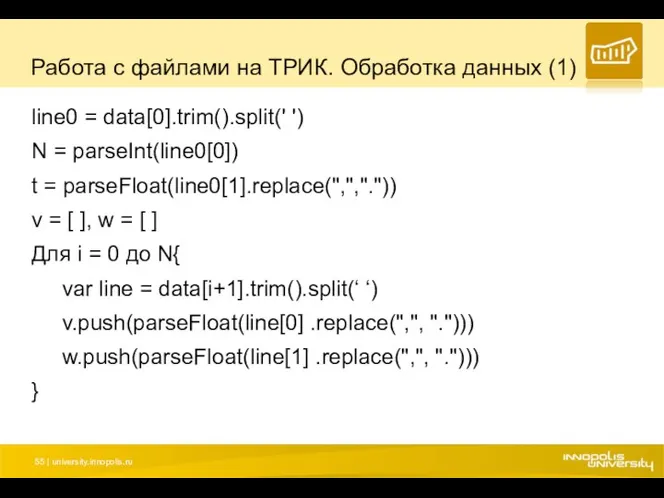
Работа с файлами на ТРИК. Обработка данных (1)
line0 = data[0].trim().split(' ')
N
Работа с файлами на ТРИК. Обработка данных (1)
line0 = data[0].trim().split(' ')
N
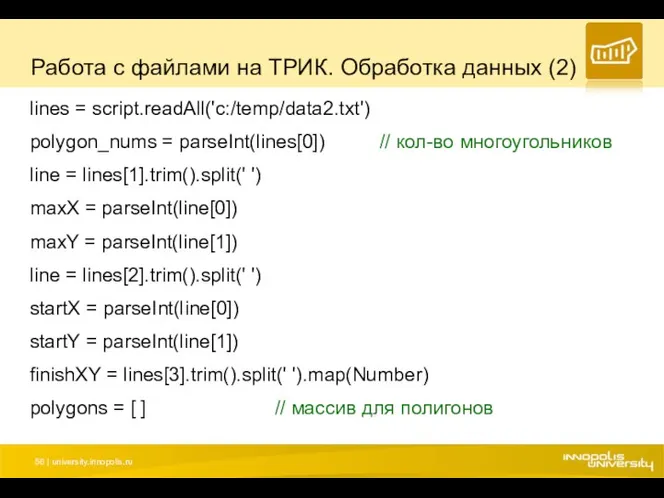
Работа с файлами на ТРИК. Обработка данных (2)
lines = script.readAll('c:/temp/data2.txt')
polygon_nums =
Работа с файлами на ТРИК. Обработка данных (2)
lines = script.readAll('c:/temp/data2.txt')
polygon_nums =
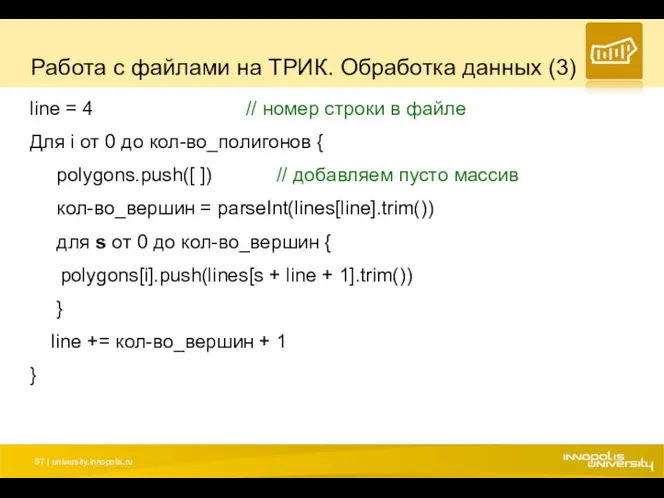
Работа с файлами на ТРИК. Обработка данных (3)
line = 4 //
Работа с файлами на ТРИК. Обработка данных (3)
line = 4 //
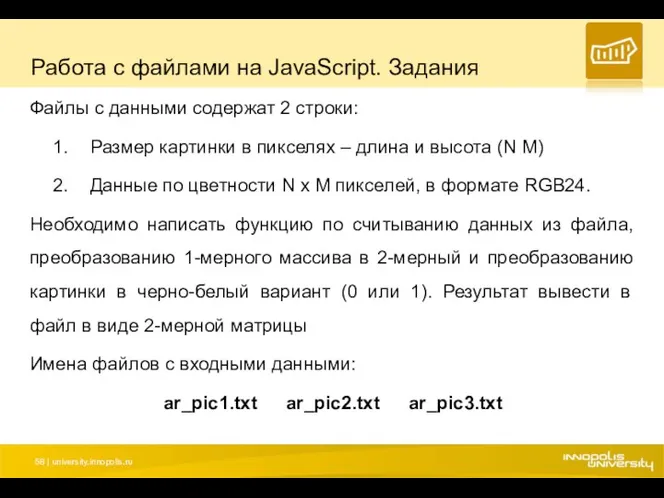
Работа с файлами на JavaScript. Задания
Файлы с данными содержат 2 строки:
Размер
Работа с файлами на JavaScript. Задания
Файлы с данными содержат 2 строки:
Размер
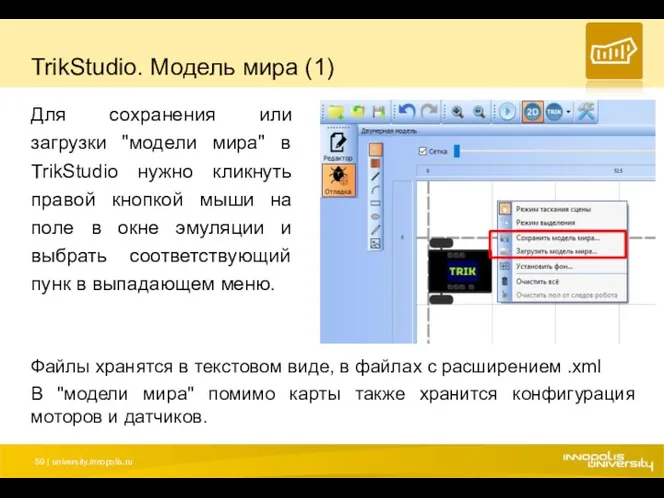
TrikStudio. Модель мира (1)
Для сохранения или загрузки "модели мира" в TrikStudio
TrikStudio. Модель мира (1)
Для сохранения или загрузки "модели мира" в TrikStudio
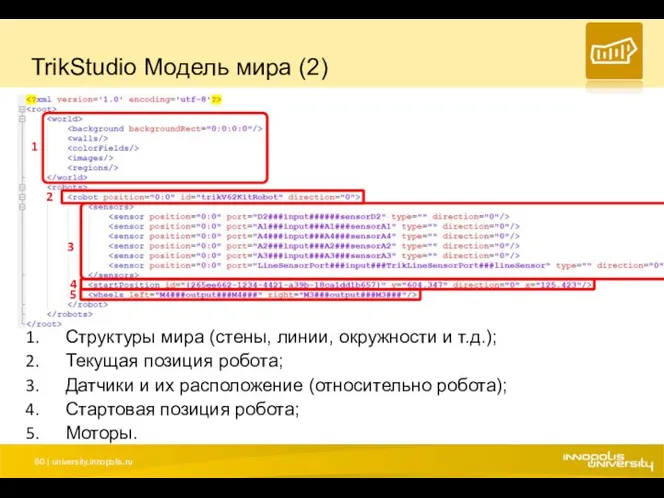
TrikStudio Модель мира (2)
Структуры мира (стены, линии, окружности и т.д.);
Текущая позиция
TrikStudio Модель мира (2)
Структуры мира (стены, линии, окружности и т.д.);
Текущая позиция
Оффлайн презентации по ИРС
https://goo.gl/UVapPu
Фильтрация значений датчиков
Построение карты. Локализация
Счисление пути в задачах
Оффлайн презентации по ИРС
https://goo.gl/UVapPu
Фильтрация значений датчиков
Построение карты. Локализация
Счисление пути в задачах

ОНТИ ИРС. Финал 2016/17
Задачи:
Локализация;
Построение пути;
Считывание штрихкода.
Подзадачи:
Движение прямо;
Повороты на 90°;
Движение в лабиринте;
Обнаружение
ОНТИ ИРС. Финал 2016/17
Задачи:
Локализация;
Построение пути;
Считывание штрихкода.
Подзадачи:
Движение прямо;
Повороты на 90°;
Движение в лабиринте;
Обнаружение

ОНТИ ИРС. Финал 2017/18
Изменения:
Штрихкоды заменены ARTag маркерами;
Добавлена задача на поиск обрушений;
Добавлено
ОНТИ ИРС. Финал 2017/18
Изменения:
Штрихкоды заменены ARTag маркерами;
Добавлена задача на поиск обрушений;
Добавлено
Контакты
Алексей Клячин
www.robonest.ru
Михаил Фадеев
m.fadeew@gmail.com
Контакты
Алексей Клячин
www.robonest.ru
Михаил Фадеев
m.fadeew@gmail.com
 Online-курс Женское счастье
Online-курс Женское счастье Нахождение оптимального маршрута с пересадками на железной дороге
Нахождение оптимального маршрута с пересадками на железной дороге Представление чисел в компьютере. Прямой, обратный и дополнительный код
Представление чисел в компьютере. Прямой, обратный и дополнительный код Work with computer
Work with computer Геоинформационные системы
Геоинформационные системы Доступ граждан к правовой информации
Доступ граждан к правовой информации Маршрутизация и транспортировка данных по компьютерным сетям
Маршрутизация и транспортировка данных по компьютерным сетям Средства рекламы
Средства рекламы Первичный ключ к базе данных
Первичный ключ к базе данных Хранение информации
Хранение информации Мастер-класс по написанию литературного обзора
Мастер-класс по написанию литературного обзора Язык программирования Java. Многопоточное программирование
Язык программирования Java. Многопоточное программирование Логические элементы
Логические элементы Электронная почта. (5 класс)
Электронная почта. (5 класс) Измерение информации (алфавитный подход). Единицы измерения информации
Измерение информации (алфавитный подход). Единицы измерения информации Обработка информации и алгоритмы
Обработка информации и алгоритмы 3D принтеры
3D принтеры Нейронные сети
Нейронные сети Рисунки в режиме символьной печати
Рисунки в режиме символьной печати Обзор функциональных возможностей ERP–решения фирмы 1С
Обзор функциональных возможностей ERP–решения фирмы 1С The Mass Media and its influence on youth
The Mass Media and its influence on youth Журналистика в современном социокультурном пространстве
Журналистика в современном социокультурном пространстве Динамические данные разветвленной структуры
Динамические данные разветвленной структуры 우분투 리눅스를 vmware에 설치 하시오
우분투 리눅스를 vmware에 설치 하시오 Наследование в C#
Наследование в C# Задачи на ветвление
Задачи на ветвление Условный оператор на языке Pascal
Условный оператор на языке Pascal Application layer. Computer networking. (Chapter 2)
Application layer. Computer networking. (Chapter 2)