- Дифференциальные уравнения

Содержание
- 2. Решение дифференциальных уравнений Для решения дифференциальных уравнений предназначены специальные функции MATLAB, в вычислительной математике их называют
- 3. Решение задачи Коши Для решения задачи Коши в MATLAB существует семь солверов: ode45, ode23, ode113, ode15s,
- 4. В достаточно общем случае вызов солвера для решения задачи Коши производится следующим образом (здесь под solver
- 5. [Т, Y] = solver(odefun,interval,y0,options), где odefun —указатель на вектор функцию- столбец правой части системы уравнений, interval
- 6. Солвер возвращает массив T с координатами узлов сетки, в которых найдено решение, и матрицу решений Y,
- 7. Схема решения таких задач в MATLAB состоит из следующих этапов. 1. Приведение дифференциального уравнения к системе
- 8. Разберем решение дифференциальных уравнений на примере задачи о колебаниях материальной точки под воздействием внешней силы в
- 9. Исходную задачу надо привести к системе дифференциальных уравнений. Для этого вводят столько вспомогательных функций, каков порядок
- 10. Второй этап состоит в написании функции для системы дифференциальных уравнений. Функция должна иметь два входных аргумента:
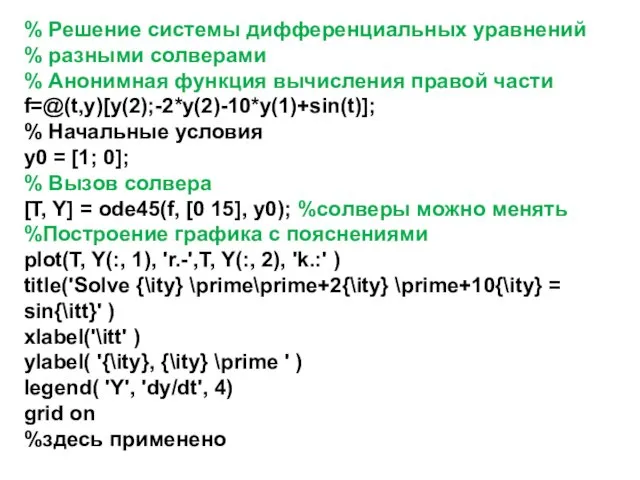
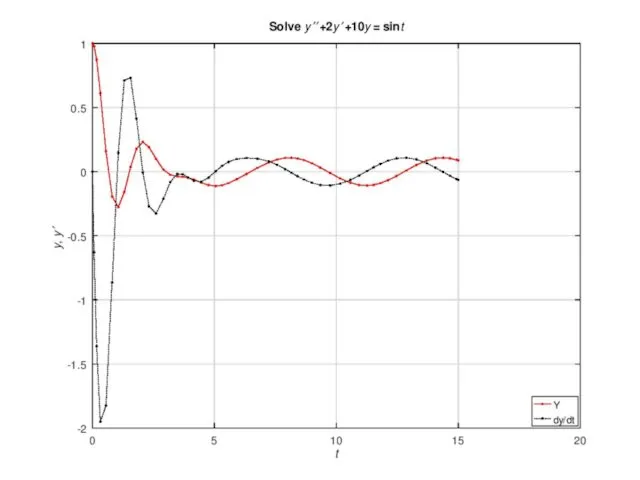
- 11. % Решение системы дифференциальных уравнений % разными солверами % Анонимная функция вычисления правой части f=@(t,y)[y(2);-2*y(2)-10*y(1)+sin(t)]; %
- 12. Здесь применено кодирование символов как в LaTex: \bf Bold font \it Italic font \rm Normal font
- 13. Можно использовать греческие буквы, математические символы и т.д. Очень хороший способ документирования графиков.
- 15. Задание: Привести следующие дифференциальные уравнения к системе дифференциальных уравнений первого порядка y’’’’=-t^2*y’’’-y*sin(t)-y’ y(0)=0,y’(0)=1,y’’(0)=0,y’’’(0)=0. y’’=2(1-y^2)y-y’, y(0)=0, y’(0)=1.
- 16. function solvdem % Файл-функция для решения дифференциального уравнения % формирование вектора начальных условий y0 = [1;
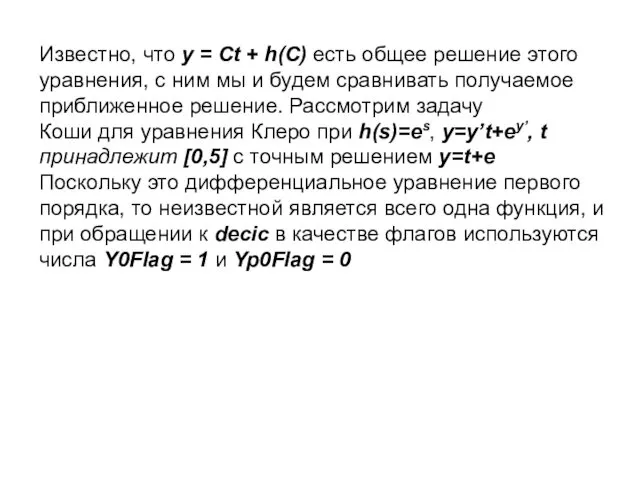
- 18. Решение уравнений Лотки—Вольтерры разными солверами В качестве объекта исследования возьмем модель Лотки—Вольтерры борьбы за существование. Обозначим:
- 19. function comparesolvers % Сравнение солверов Y0 = [1000; 1100]; % вызов солвера ode23 [T, Y] =
- 20. Солвер ode15s обладает большей точностью в данном случае.
- 21. function comparesolvers % Сравнение солверов Y0 = [1000; 1100]; % вызов солвера odell3 [T, Y] =
- 23. Управление процессом решения Эффективное решение дифференциальных уравнений невозможно без понимания основных вопросов, связанных с численными методами.
- 24. odestruct = odeset () odestruct = odeset ("field1", value1, "field2", value2, …) odestruct = odeset (oldstruct,
- 25. Параметры odeset
- 26. Структура с опциями солверов модифицируется так же, как и в случае с optimset при решении уравнений
- 27. >> odeset() List of the most common ODE solver options. Default values are in square brackets.
- 28. Задание точности вычислений Точность вычислений оказывает существенное влияние на качество приближенного решения. Допускается два способа контроля
- 29. Шаг интегрирования солвера определяется двумя свойствами: • Maxstep — задает максимальный шаг (по умолчанию десятая часть
- 30. Убедимся в том, что заданных по умолчанию значений, в частности, относительной погрешности 10-3, не всегда достаточно
- 31. % Решение дифференциального уравнения y''=-1/t^2 a=0.01; f=@(t,y)[y(2);-1/t.^2]; % Правая часть системы y0=[log(a);1/a]; % Вектор-столбец начальных условий
- 32. Решения разными солверами и ln(t) Вычисление солвером ode45 этого дифференциального уравнения абсолютно неверно при значениях t>0.5
- 33. Ошибка решения подробно
- 35. Управление выводом результатов Примеры предыдущих разделов предполагали вызов солверов с двумя выходными аргументами — массивами. В
- 36. Возможности вывода результата, предоставляемые солверами MATLAB, не исчерпываются только таким способом визуализации решения. Пользователь может выбрать
- 37. Имеется несколько стандартных функций: • odeplot — построение графиков компонент решения; • odephas2 — построение графиков
- 39. Дифференциальные уравнения с параметрами Солверы допускают решение систем обыкновенных дифференциальных уравнений, правая часть которых зависит от
- 40. Приведенная выше система дифференциальных уравнений Лотки—Вольтерры зависит от четырех параметров: Р, р, R и г, и
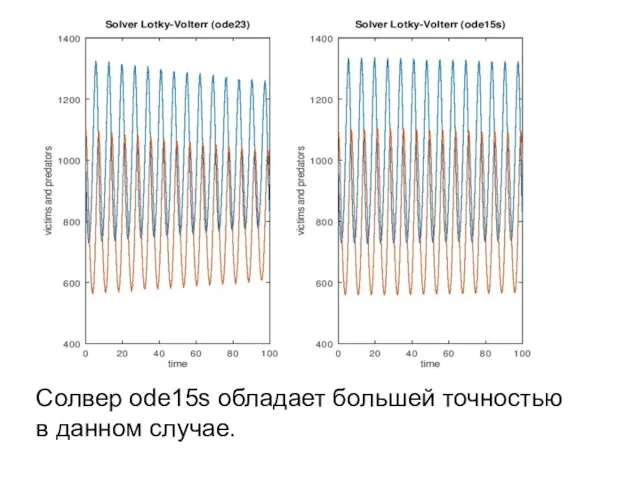
- 41. function [T,Y] = LotVolPar(P,p,R,r) % подфункция для вычисления правой части системы, зависящей от параметров F =@(t,y)
- 43. Если вектор-функция правой части дифференциального уравнения достаточно сложная, содержит несколько операторов и не может быть записана
- 44. function [T,Y] = LotVolPar(P,p,R,r) % Анонимная функция, вызывающая подфункцию % зависящую от параметров F =@(t,y) F1(t,y,P,p,R,r);
- 45. Системы, не разрешенные относительно производной, дифференциально-алгебраические уравнения До сих пор мы рассматривали задачу Коши для систем
- 46. Обратимся теперь к решению задачи Коши для дифференциальных уравнений вида F(t, Y, Y')=0, не разрешенных относительно
- 47. Возникает вопрос, откуда взять начальное значение для производной, которое не может быть произвольным, поскольку в начальный
- 48. В задаче Коши вектор Y(t0) задан и требуется найти подходящее Y'(t0). Для этого следует задать флаг
- 49. Известно, что у = Ct + h(C) есть общее решение этого уравнения, с ним мы и
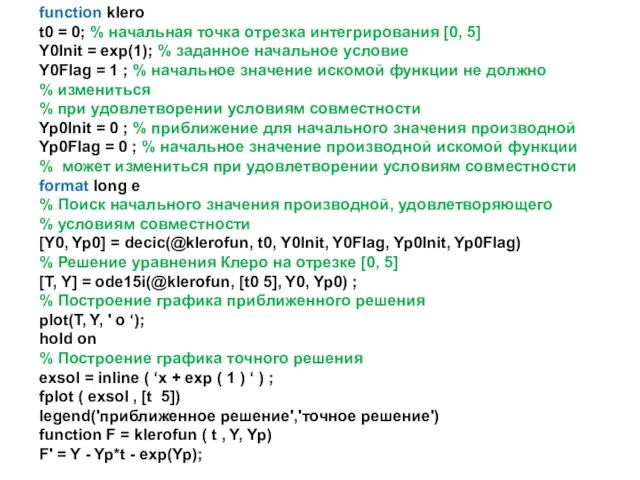
- 50. function klero t0 = 0; % начальная точка отрезка интегрирования [0, 5] Y0Init = ехр(1); %
- 53. Скачать презентацию
Решение дифференциальных уравнений
Для решения дифференциальных уравнений предназначены специальные функции MATLAB, в
Решение дифференциальных уравнений
Для решения дифференциальных уравнений предназначены специальные функции MATLAB, в
Решение задачи Коши
Для решения задачи Коши в MATLAB существует семь солверов:
Решение задачи Коши
Для решения задачи Коши в MATLAB существует семь солверов:
В достаточно общем случае вызов солвера для решения задачи Коши производится
В достаточно общем случае вызов солвера для решения задачи Коши производится
![[Т, Y] = solver(odefun,interval,y0,options), где odefun —указатель на вектор функцию-](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/106483/slide-4.jpg)
[Т, Y] = solver(odefun,interval,y0,options),
где odefun —указатель на вектор функцию- столбец
[Т, Y] = solver(odefun,interval,y0,options),
где odefun —указатель на вектор функцию- столбец
Солвер возвращает массив T с координатами узлов сетки, в которых найдено
Солвер возвращает массив T с координатами узлов сетки, в которых найдено
Схема решения таких задач в MATLAB состоит из следующих этапов.
1. Приведение
Схема решения таких задач в MATLAB состоит из следующих этапов.
1. Приведение
Разберем решение дифференциальных уравнений на примере задачи о колебаниях материальной точки
Разберем решение дифференциальных уравнений на примере задачи о колебаниях материальной точки
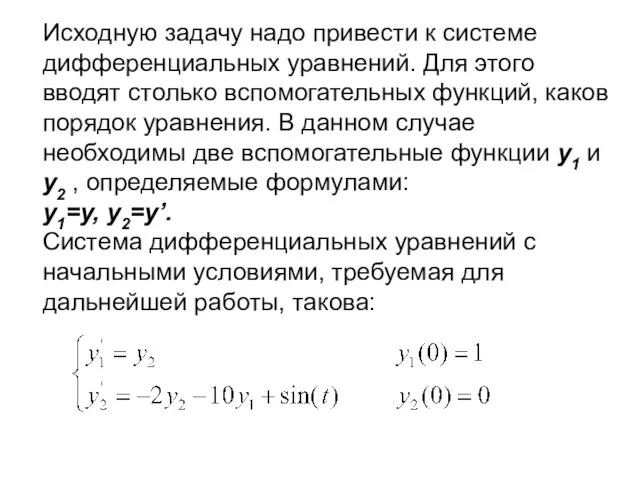
Исходную задачу надо привести к системе дифференциальных уравнений. Для этого вводят
Исходную задачу надо привести к системе дифференциальных уравнений. Для этого вводят
Второй этап состоит в написании функции для системы дифференциальных уравнений. Функция
Второй этап состоит в написании функции для системы дифференциальных уравнений. Функция
% Решение системы дифференциальных уравнений
% разными солверами
% Анонимная функция вычисления правой
% Решение системы дифференциальных уравнений
% разными солверами
% Анонимная функция вычисления правой
Здесь применено кодирование символов как в LaTex:
\bf Bold font
\it Italic font
\rm
Здесь применено кодирование символов как в LaTex:
\bf Bold font
\it Italic font
\rm
Можно использовать греческие буквы, математические символы и т.д.
Очень хороший способ документирования
Можно использовать греческие буквы, математические символы и т.д.
Очень хороший способ документирования
Задание: Привести следующие дифференциальные уравнения к системе дифференциальных уравнений первого порядка
y’’’’=-t^2*y’’’-y*sin(t)-y’
Задание: Привести следующие дифференциальные уравнения к системе дифференциальных уравнений первого порядка
y’’’’=-t^2*y’’’-y*sin(t)-y’
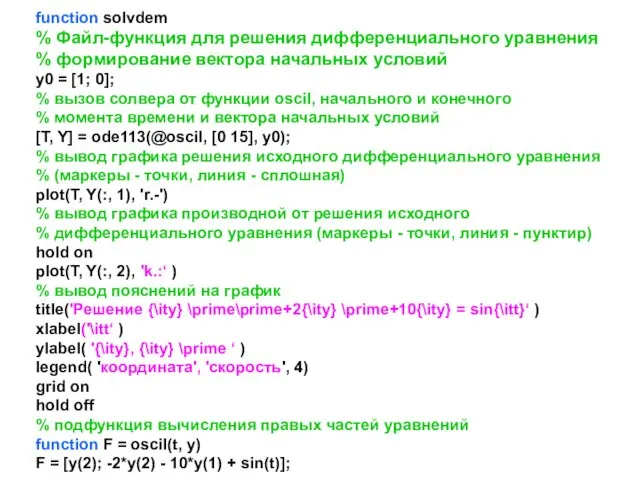
function solvdem
% Файл-функция для решения дифференциального уравнения
% формирование вектора начальных условий
y0
function solvdem
% Файл-функция для решения дифференциального уравнения
% формирование вектора начальных условий
y0

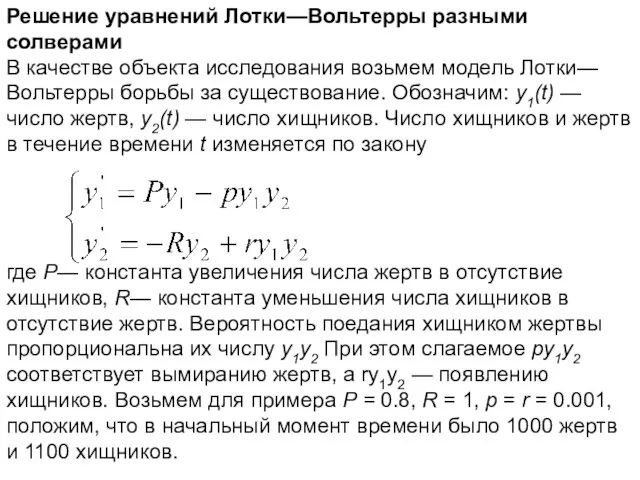
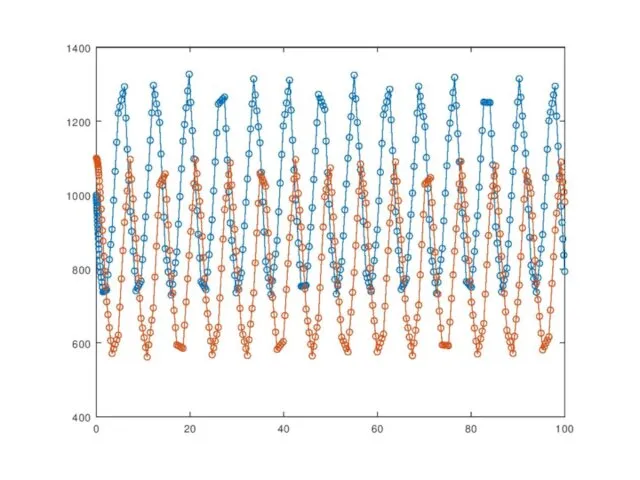
Решение уравнений Лотки—Вольтерры разными солверами
В качестве объекта исследования возьмем модель Лотки—Вольтерры
Решение уравнений Лотки—Вольтерры разными солверами
В качестве объекта исследования возьмем модель Лотки—Вольтерры
![function comparesolvers % Сравнение солверов Y0 = [1000; 1100]; %](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/106483/slide-18.jpg)
function comparesolvers
% Сравнение солверов
Y0 = [1000; 1100];
% вызов солвера ode23
[T, Y]
function comparesolvers
% Сравнение солверов
Y0 = [1000; 1100];
% вызов солвера ode23
[T, Y]
Солвер ode15s обладает большей точностью в данном случае.
Солвер ode15s обладает большей точностью в данном случае.
![function comparesolvers % Сравнение солверов Y0 = [1000; 1100]; %](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/106483/slide-20.jpg)
function comparesolvers
% Сравнение солверов
Y0 = [1000; 1100];
% вызов солвера odell3
[T, Y]
function comparesolvers
% Сравнение солверов
Y0 = [1000; 1100];
% вызов солвера odell3
[T, Y]

Управление процессом решения
Эффективное решение дифференциальных уравнений невозможно без понимания основных вопросов,
Управление процессом решения
Эффективное решение дифференциальных уравнений невозможно без понимания основных вопросов,
odestruct = odeset ()
odestruct = odeset ("field1", value1, "field2",
value2, …)
odestruct
odestruct = odeset ()
odestruct = odeset ("field1", value1, "field2",
value2, …)
odestruct
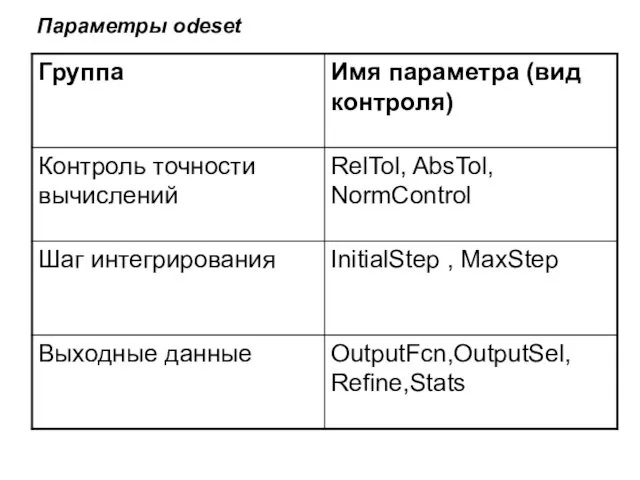
Параметры odeset
Параметры odeset
Структура с опциями солверов модифицируется так же, как и в случае
Структура с опциями солверов модифицируется так же, как и в случае

>> odeset()
List of the most common ODE solver options.
Default values are
>> odeset()
List of the most common ODE solver options.
Default values are
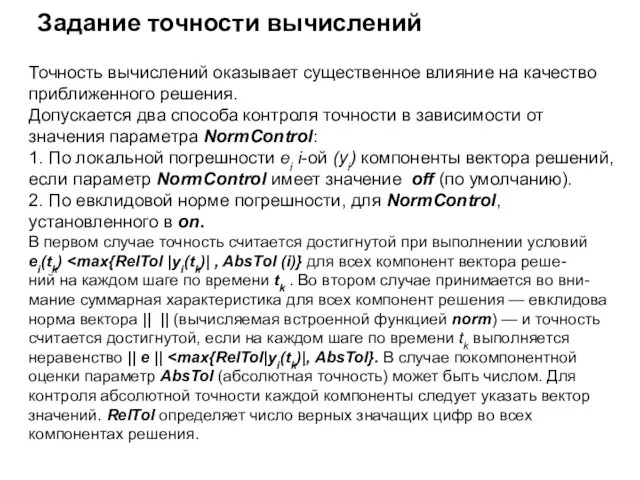
Задание точности вычислений
Точность вычислений оказывает существенное влияние на качество приближенного решения.
Допускается
Задание точности вычислений
Точность вычислений оказывает существенное влияние на качество приближенного решения.
Допускается
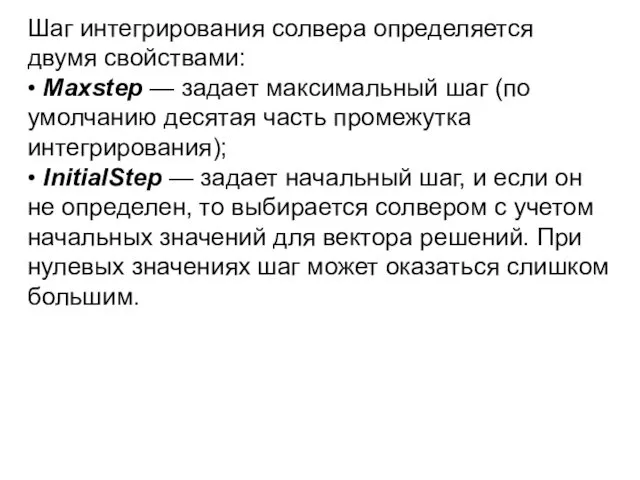
Шаг интегрирования солвера определяется двумя свойствами:
• Maxstep — задает максимальный шаг
Шаг интегрирования солвера определяется двумя свойствами:
• Maxstep — задает максимальный шаг
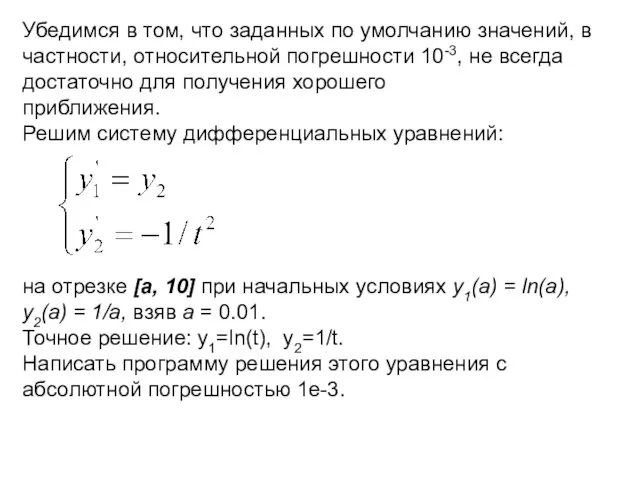
Убедимся в том, что заданных по умолчанию значений, в частности, относительной
Убедимся в том, что заданных по умолчанию значений, в частности, относительной
![% Решение дифференциального уравнения y''=-1/t^2 a=0.01; f=@(t,y)[y(2);-1/t.^2]; % Правая часть](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/106483/slide-30.jpg)
% Решение дифференциального уравнения y''=-1/t^2
a=0.01;
f=@(t,y)[y(2);-1/t.^2]; % Правая часть системы
y0=[log(a);1/a]; % Вектор-столбец
% Решение дифференциального уравнения y''=-1/t^2
a=0.01;
f=@(t,y)[y(2);-1/t.^2]; % Правая часть системы
y0=[log(a);1/a]; % Вектор-столбец
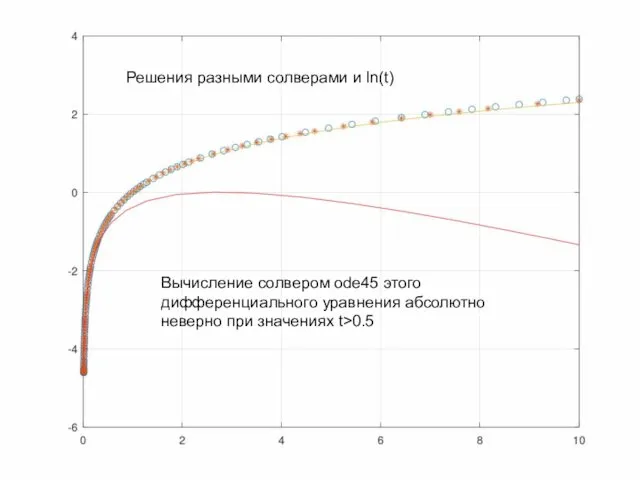
Решения разными солверами и ln(t)
Вычисление солвером ode45 этого дифференциального уравнения
Решения разными солверами и ln(t)
Вычисление солвером ode45 этого дифференциального уравнения

Ошибка решения подробно
Ошибка решения подробно


Управление выводом результатов
Примеры предыдущих разделов предполагали вызов солверов с двумя выходными
Управление выводом результатов
Примеры предыдущих разделов предполагали вызов солверов с двумя выходными
Возможности вывода результата, предоставляемые солверами MATLAB, не исчерпываются только таким способом
Возможности вывода результата, предоставляемые солверами MATLAB, не исчерпываются только таким способом
Имеется несколько стандартных функций:
• odeplot — построение графиков компонент решения;
• odephas2
Имеется несколько стандартных функций:
• odeplot — построение графиков компонент решения;
• odephas2

Дифференциальные уравнения с параметрами
Солверы допускают решение систем обыкновенных дифференциальных уравнений, правая
Дифференциальные уравнения с параметрами
Солверы допускают решение систем обыкновенных дифференциальных уравнений, правая
Приведенная выше система дифференциальных уравнений Лотки—Вольтерры зависит от четырех параметров: Р,
Приведенная выше система дифференциальных уравнений Лотки—Вольтерры зависит от четырех параметров: Р,
![function [T,Y] = LotVolPar(P,p,R,r) % подфункция для вычисления правой части](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/106483/slide-40.jpg)
function [T,Y] = LotVolPar(P,p,R,r)
% подфункция для вычисления правой части системы, зависящей
function [T,Y] = LotVolPar(P,p,R,r)
% подфункция для вычисления правой части системы, зависящей

Если вектор-функция правой части дифференциального уравнения достаточно сложная, содержит несколько операторов
Если вектор-функция правой части дифференциального уравнения достаточно сложная, содержит несколько операторов
![function [T,Y] = LotVolPar(P,p,R,r) % Анонимная функция, вызывающая подфункцию %](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/106483/slide-43.jpg)
function [T,Y] = LotVolPar(P,p,R,r)
% Анонимная функция, вызывающая подфункцию
% зависящую от
function [T,Y] = LotVolPar(P,p,R,r)
% Анонимная функция, вызывающая подфункцию
% зависящую от
Системы, не разрешенные относительно производной,
дифференциально-алгебраические уравнения
До сих пор мы рассматривали задачу
Системы, не разрешенные относительно производной,
дифференциально-алгебраические уравнения
До сих пор мы рассматривали задачу
Обратимся теперь к решению задачи Коши для дифференциальных уравнений вида F(t,
Обратимся теперь к решению задачи Коши для дифференциальных уравнений вида F(t,
Возникает вопрос, откуда взять начальное значение для производной, которое не может
Возникает вопрос, откуда взять начальное значение для производной, которое не может
В задаче Коши вектор Y(t0) задан и требуется найти подходящее Y'(t0).
В задаче Коши вектор Y(t0) задан и требуется найти подходящее Y'(t0).
Известно, что у = Ct + h(C) есть общее решение этого
Известно, что у = Ct + h(C) есть общее решение этого
function klero
t0 = 0; % начальная точка отрезка интегрирования [0, 5]
Y0Init
function klero
t0 = 0; % начальная точка отрезка интегрирования [0, 5]
Y0Init

 Правильные многогранники
Правильные многогранники Лото УМНОЖАЙ-КА закрепление табличного умножения
Лото УМНОЖАЙ-КА закрепление табличного умножения Неевклидова геометрия
Неевклидова геометрия интегрированный урок окружающего мира и математики 2 класс (Виды животных, Время)
интегрированный урок окружающего мира и математики 2 класс (Виды животных, Время) Графический способ решения уравнений и систем уравнений в среде Microsoft Excel
Графический способ решения уравнений и систем уравнений в среде Microsoft Excel Табличное сложение. Страничка для любознательных
Табличное сложение. Страничка для любознательных Презентация к уроку по математике в 1 классе по теме Общие приемы табличного сложения с переходом через десяток
Презентация к уроку по математике в 1 классе по теме Общие приемы табличного сложения с переходом через десяток Комбинация шара с другими телами
Комбинация шара с другими телами Многоугольники
Многоугольники Решение систем уравнений методом алгебраического сложения
Решение систем уравнений методом алгебраического сложения Сложение и вычитание десятичных дробей
Сложение и вычитание десятичных дробей Устный счет Осенний листопад (презентация к уроку математики, 3 класс)
Устный счет Осенний листопад (презентация к уроку математики, 3 класс) Приближенные значения чисел. Округление чисел
Приближенные значения чисел. Округление чисел Интерактивный тест по математике. 4 класс.
Интерактивный тест по математике. 4 класс. Комбинаторные задачи
Комбинаторные задачи Предел числовой последовательности
Предел числовой последовательности Умножение положительных и отрицательных чисел
Умножение положительных и отрицательных чисел Второй признак подобия треугольников
Второй признак подобия треугольников Сложение и вычитание числа 2. 1-й класс
Сложение и вычитание числа 2. 1-й класс Разработка урока математики Вычитание числа 1 1 класс
Разработка урока математики Вычитание числа 1 1 класс Математическая сказка Как геометрические фигуры город строили
Математическая сказка Как геометрические фигуры город строили Вспомним компоненты действий
Вспомним компоненты действий Прямоугольный параллелепипед
Прямоугольный параллелепипед Тор көзді қағазға сызылған фигуралардың ауданын табу
Тор көзді қағазға сызылған фигуралардың ауданын табу Параллельный перенос. Поворот
Параллельный перенос. Поворот Введение в предмет математики
Введение в предмет математики Криволинейный интеграл
Криволинейный интеграл Сложение и вычитание двузначных чисел
Сложение и вычитание двузначных чисел