- Динамическое программирование. (Лекция 3)

Содержание
- 2. 1. Понятие о динамическом программировании. Динамическое программирование – метод оптимизации, приспособленный к операциям, в которых процесс
- 3. Показатель эффективности – целевая функция, зависит от начального состояния и управления Основные предположения: 1.Состояние Sk системы
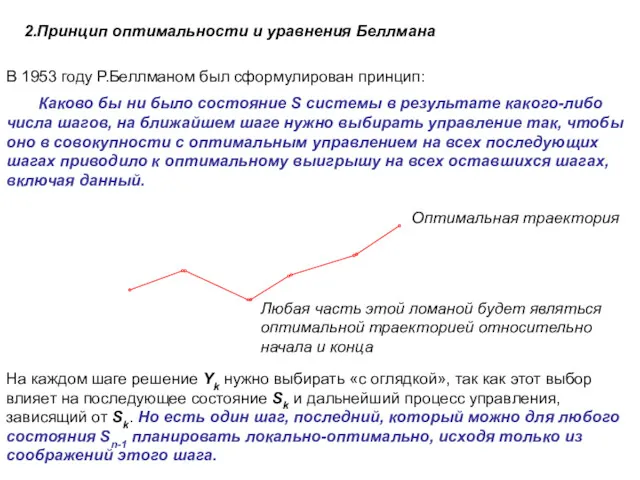
- 4. 2.Принцип оптимальности и уравнения Беллмана В 1953 году Р.Беллманом был сформулирован принцип: Каково бы ни было
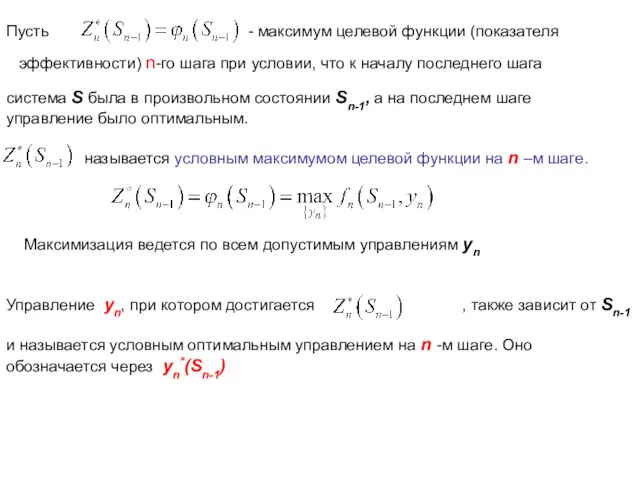
- 5. Пусть эффективности) n-го шага при условии, что к началу последнего шага система S была в произвольном
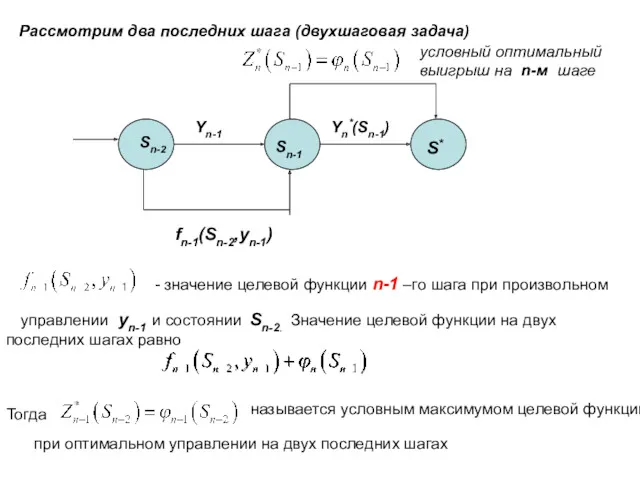
- 6. Рассмотрим два последних шага (двухшаговая задача) Sn-2 Sn-1 S* Yn-1 Yn*(Sn-1) fn-1(Sn-2,yn-1) - значение целевой функции
- 7. Соответствующее управление yn-1 на (n-1)-м шаге обозначается через yn-1*(Sn-2) и называется условным оптимальным управлением на (n-1)-м
- 8. 3. Задача о выборе оптимального пути Необходимо выбрать путь из пункта А в пункт В, чтобы
- 9. Пример решения задачи динамического программирования 4 4 4 4 4 4 1 1 1 1 1
- 10. 4.Задача о распределении средств между предприятиями Двум предприятиям выделено a = 2000 единиц средств на 4
- 11. 5.Решение задачи методом динамического программирования Пусть в начале некоторого произвольного года мы должны распределить x единиц
- 12. Обозначим условный максимум показателя эффективности k –го шага) а условное оптимальное управление для этого состояния через
- 13. Здесь y4* − условное оптимальное управление на четвертом шаге Для k=3,2,1 справедливо рекуррентное соотношение поэтому для
- 14. Для k=2 Функция z=8,34x +0,34y возрастает по y поэтому ее максимальное значение на отрезке [0, x]
- 16. Скачать презентацию
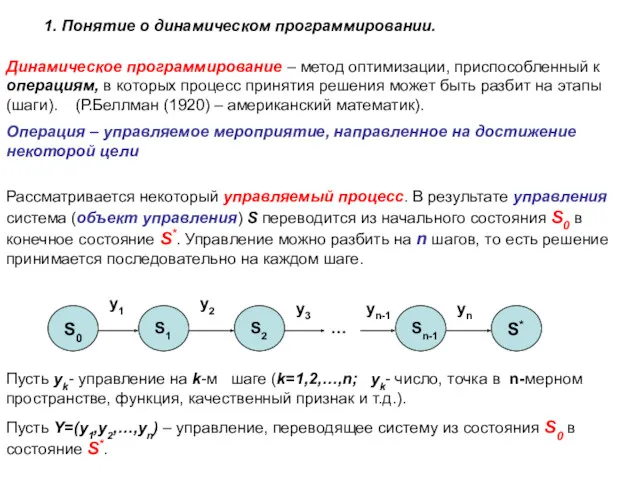
1. Понятие о динамическом программировании.
Динамическое программирование – метод оптимизации, приспособленный
1. Понятие о динамическом программировании.
Динамическое программирование – метод оптимизации, приспособленный
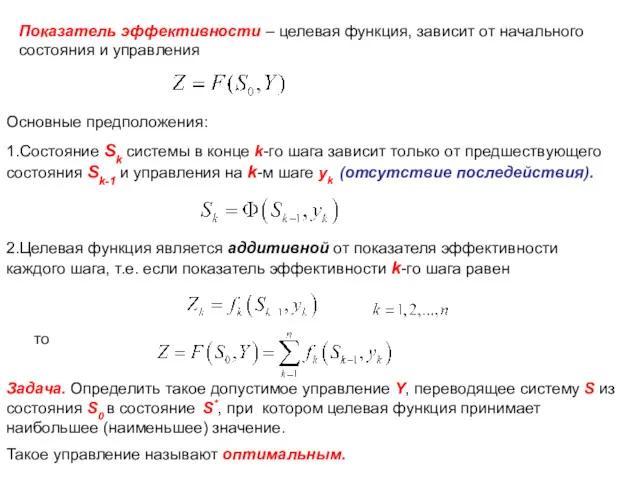
Показатель эффективности – целевая функция, зависит от начального состояния и управления
Основные
Показатель эффективности – целевая функция, зависит от начального состояния и управления
Основные
2.Принцип оптимальности и уравнения Беллмана
В 1953 году Р.Беллманом был сформулирован принцип:
Каково
2.Принцип оптимальности и уравнения Беллмана
В 1953 году Р.Беллманом был сформулирован принцип:
Каково
Пусть
эффективности) n-го шага при условии, что к началу последнего шага
система
Пусть
эффективности) n-го шага при условии, что к началу последнего шага
система
Рассмотрим два последних шага (двухшаговая задача)
Sn-2
Sn-1
S*
Yn-1
Yn*(Sn-1)
fn-1(Sn-2,yn-1)
- значение целевой функции n-1 –го
Рассмотрим два последних шага (двухшаговая задача)
Sn-2
Sn-1
S*
Yn-1
Yn*(Sn-1)
fn-1(Sn-2,yn-1)
- значение целевой функции n-1 –го
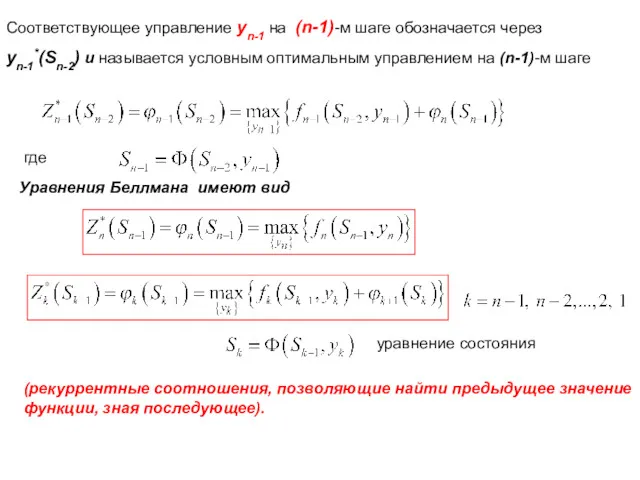
Соответствующее управление yn-1 на (n-1)-м шаге обозначается через
yn-1*(Sn-2) и называется
Соответствующее управление yn-1 на (n-1)-м шаге обозначается через
yn-1*(Sn-2) и называется

3. Задача о выборе оптимального пути
Необходимо выбрать путь из пункта А
3. Задача о выборе оптимального пути
Необходимо выбрать путь из пункта А
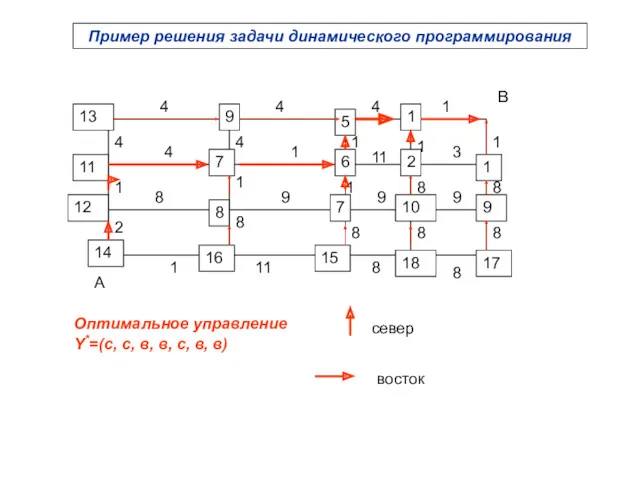
Пример решения задачи динамического программирования
4
4
4
4
4
4
1
1
1
1
1
3
1
1
1
2
А
В
8
8
9
8
8
8
8
1
11
8
8
8
9
9
11
1
1
5
2
9
9
6
10
17
13
7
7
18
11
8
15
12
16
14
Оптимальное управление Y*=(с, с, в, в, с,
Пример решения задачи динамического программирования
4
4
4
4
4
4
1
1
1
1
1
3
1
1
1
2
А
В
8
8
9
8
8
8
8
1
11
8
8
8
9
9
11
1
1
5
2
9
9
6
10
17
13
7
7
18
11
8
15
12
16
14
Оптимальное управление Y*=(с, с, в, в, с,
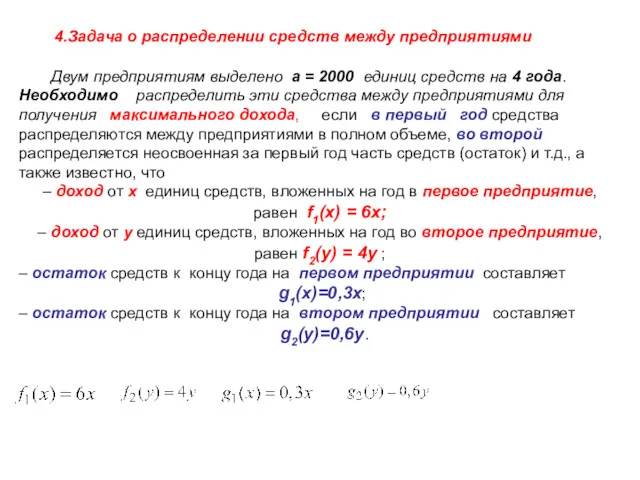
4.Задача о распределении средств между предприятиями
Двум предприятиям выделено a = 2000
4.Задача о распределении средств между предприятиями
Двум предприятиям выделено a = 2000
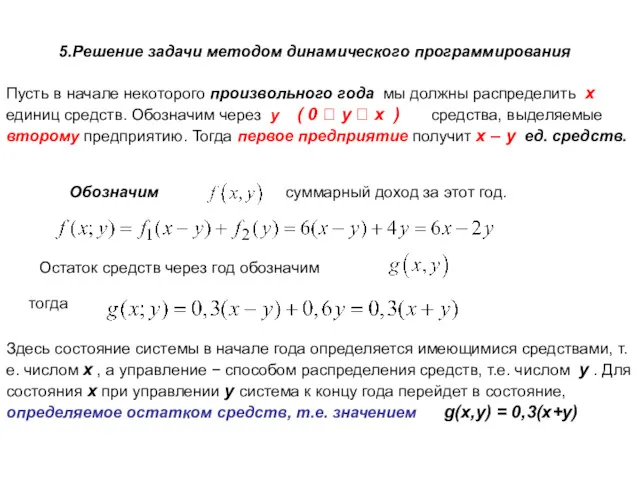
5.Решение задачи методом динамического программирования
Пусть в начале некоторого произвольного года мы
5.Решение задачи методом динамического программирования
Пусть в начале некоторого произвольного года мы
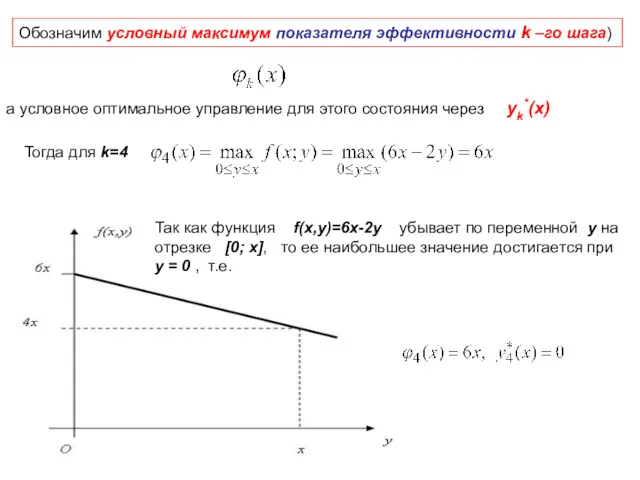
Обозначим условный максимум показателя эффективности k –го шага)
а условное оптимальное
Обозначим условный максимум показателя эффективности k –го шага)
а условное оптимальное
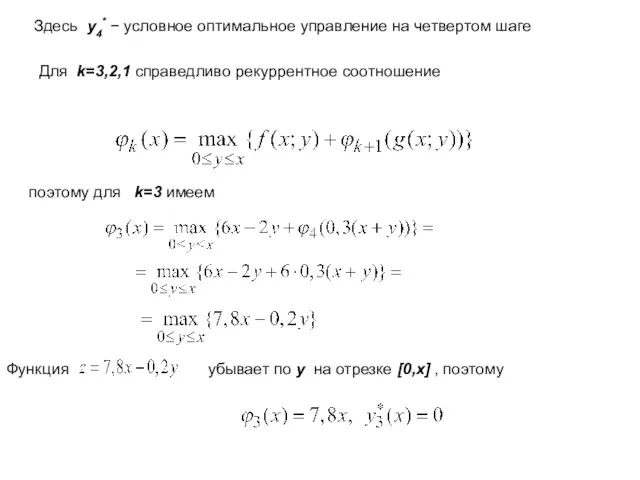
Здесь y4* − условное оптимальное управление на четвертом шаге
Для k=3,2,1
Здесь y4* − условное оптимальное управление на четвертом шаге
Для k=3,2,1
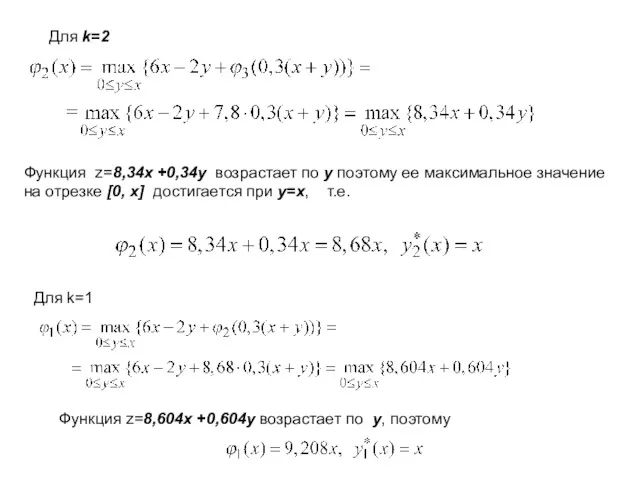
Для k=2
Функция z=8,34x +0,34y возрастает по y поэтому ее максимальное значение
Для k=2
Функция z=8,34x +0,34y возрастает по y поэтому ее максимальное значение
 Единицы измерения длины. Сантиметр, метр
Единицы измерения длины. Сантиметр, метр Табличное умножение и деление. Игры-тренажёры
Табличное умножение и деление. Игры-тренажёры Математическая логика в повседневной жизни
Математическая логика в повседневной жизни Подобные слагаемые. Распределительное свойство умножения
Подобные слагаемые. Распределительное свойство умножения Системы линейных уравнений с двумя переменными
Системы линейных уравнений с двумя переменными Четырёхугольники. Урок - лекция 8 класс
Четырёхугольники. Урок - лекция 8 класс Дифференцированный подход в обучении учащихся на уроках математики и при подготовке к ЕГЭ и ОГЭ
Дифференцированный подход в обучении учащихся на уроках математики и при подготовке к ЕГЭ и ОГЭ Действия с дробями. Задание для устного счета. Упражнение 15. 6 класс
Действия с дробями. Задание для устного счета. Упражнение 15. 6 класс Нечеткие множества
Нечеткие множества Обчислення границь функцій. Перша та друга важливі границі
Обчислення границь функцій. Перша та друга важливі границі Подготовка к ЕГЭ-2014 по математике. Решение прототипов В13 из открытого банка заданий ЕГЭ
Подготовка к ЕГЭ-2014 по математике. Решение прототипов В13 из открытого банка заданий ЕГЭ Деление с остатком
Деление с остатком Разложение многочленов на множители
Разложение многочленов на множители II признак равенства треугольников по стороне и прилежащие к ней углы
II признак равенства треугольников по стороне и прилежащие к ней углы Формулы косинуса суммы и разности двух аргументов. 10 класс
Формулы косинуса суммы и разности двух аргументов. 10 класс Полёт на планету Математика.
Полёт на планету Математика. Конкурс Ох уж эта математика!
Конкурс Ох уж эта математика! Поворот. (Геометрія. 9 клас)
Поворот. (Геометрія. 9 клас) Физикалық дамуды бағалау үшін регрессия және корреляцияны қолдану
Физикалық дамуды бағалау үшін регрессия және корреляцияны қолдану Устный счет
Устный счет Урок 1. Основные понятия и теоремы комбинаторики
Урок 1. Основные понятия и теоремы комбинаторики Площадь прямоугольника
Площадь прямоугольника Построение треугольника по трём элементам
Построение треугольника по трём элементам Процентные вычисления в жизненных ситуациях
Процентные вычисления в жизненных ситуациях Сумма бесконечной геометрической прогрессии
Сумма бесконечной геометрической прогрессии Вероятность и статистика. Урок №1. 8 класс
Вероятность и статистика. Урок №1. 8 класс Линейное уравнение с одной переменной. Урок алгебры с применением ИКТ. 7 класс
Линейное уравнение с одной переменной. Урок алгебры с применением ИКТ. 7 класс Скалярное произведение в координатах
Скалярное произведение в координатах