- Логика и основы алгоритмизации инженерных задач

Содержание
- 2. Место предмета в структуре знаний разработчика ВТ Разработка и программирование ВТ Знание языка программирования Знание инструментов
- 3. Основные понятия о графах Геометрическое определение: Граф G — фигура, состоящая из заданных точек (вершин), соединенных
- 4. Блок-схема программы. Операторы – вершины, последовательность выполнения задаётся рёбрами. Электрические цепи.
- 5. Основы теории графов заложил математик Эйлер решая задачу семи мостов Кенигсберга (Калининграда). В Калининграде было семь
- 6. В математике, графом называют пару (V, E) где V это множество вершин, а E множество пар,
- 7. Число вершин в графе – называется порядком графа, число рёбер —размером графа. Два ребра называются кратными,
- 8. Степенью вершины deg(V) называют количество инцидентных ей рёбер (при этом петли считают дважды). При вычислении степени
- 9. Эйлер показал, что возможность прохода графа (города) по каждому ребру (мосту) один и только один раз
- 10. Конечный неориентированный связный граф – это граф Эйлера тогда и только тогда, когда ровно две вершины
- 11. Связный граф – граф, в котором отсутствуют недостижимые вершины (вершины, не связанные с остальными). Неориентированный граф
- 12. Пройди тест !!! https://docs.google.com/forms/d/e/1FAIpQLSd8BT-EUkltIBKC9ucDppgRTHIss-P6OZ4ExEYwF4sX4GPLYQ/viewform?usp=sf_link
- 13. Конечный граф – граф с конечным количеством рёбер и вершин. Бесконечный граф – граф, конец которого
- 14. Матрицей смежности графа G(V,X) – граф, где V={v1, v2, …,vn}, X={x1, x2, …, xm} называется квадратная
- 15. Матрицей смежности ориентированного графа G(V,X) – граф, где V={v1, v2, …,vn}, X={x1, x2, …, xm} называется
- 16. Матрица смежности Матрица инцидентности
- 17. Представление графа с помощью списочной структуры, отражающей смежность вершин и состоящей из массива указателей Для ориентированного
- 19. Скачать презентацию
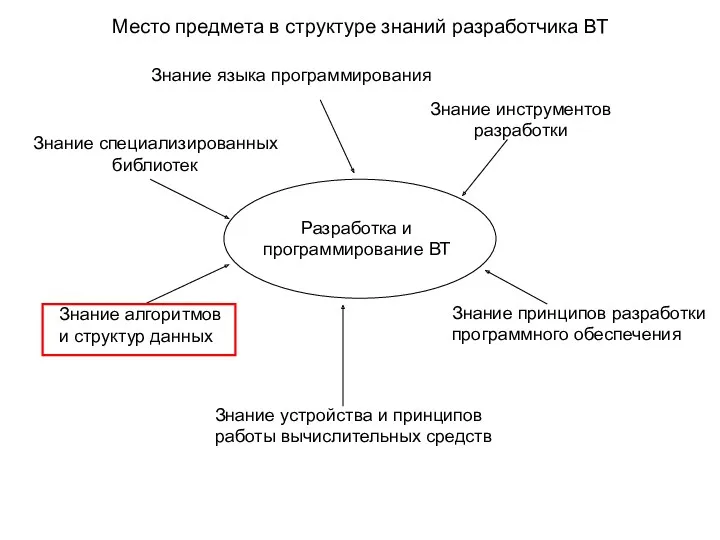
Место предмета в структуре знаний разработчика ВТ
Разработка и
программирование ВТ
Знание языка
Место предмета в структуре знаний разработчика ВТ
Разработка и
программирование ВТ
Знание языка
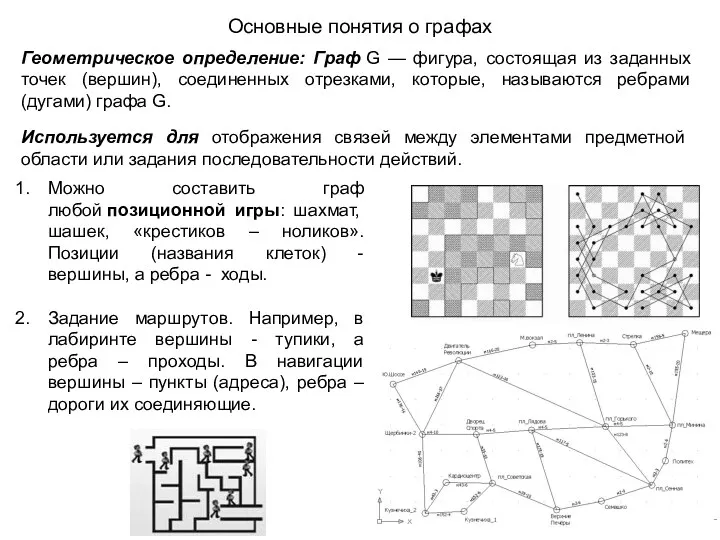
Основные понятия о графах
Геометрическое определение: Граф G — фигура, состоящая из заданных
Основные понятия о графах
Геометрическое определение: Граф G — фигура, состоящая из заданных
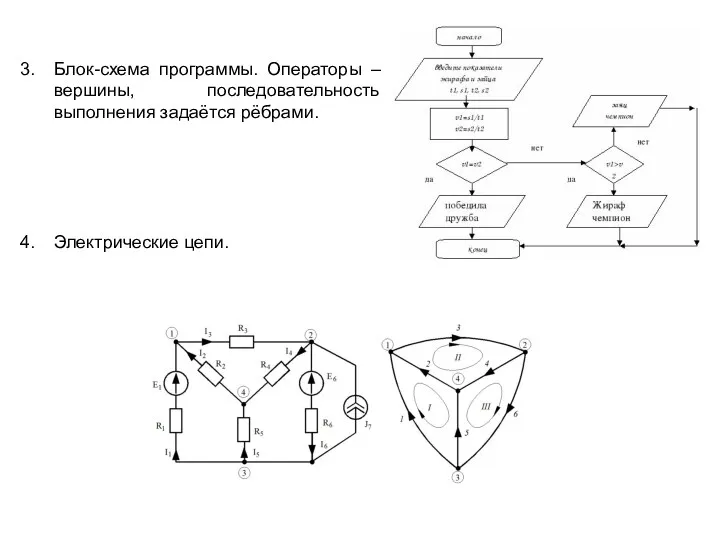
Блок-схема программы. Операторы – вершины, последовательность выполнения задаётся рёбрами.
Электрические цепи.
Блок-схема программы. Операторы – вершины, последовательность выполнения задаётся рёбрами.
Электрические цепи.
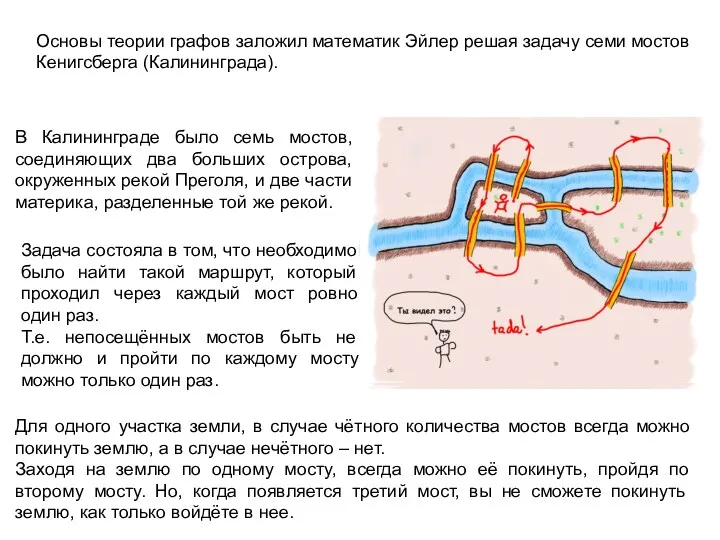
Основы теории графов заложил математик Эйлер решая задачу семи мостов
Кенигсберга
Основы теории графов заложил математик Эйлер решая задачу семи мостов
Кенигсберга
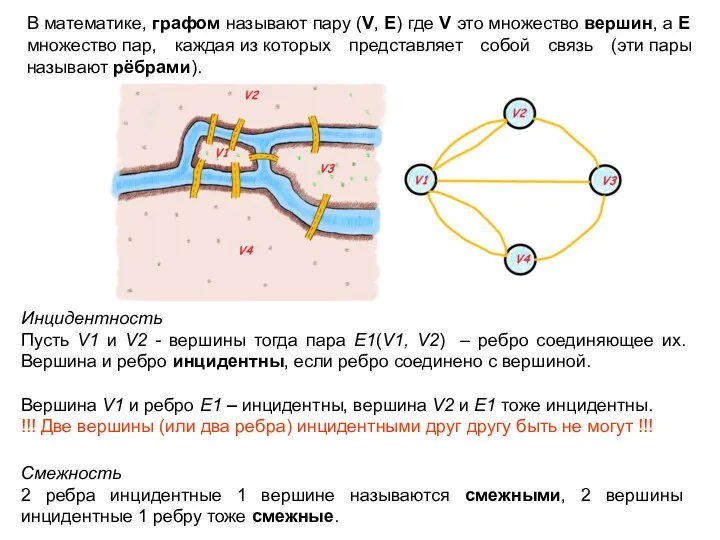
В математике, графом называют пару (V, E) где V это множество вершин, а E множество пар, каждая из которых
В математике, графом называют пару (V, E) где V это множество вершин, а E множество пар, каждая из которых
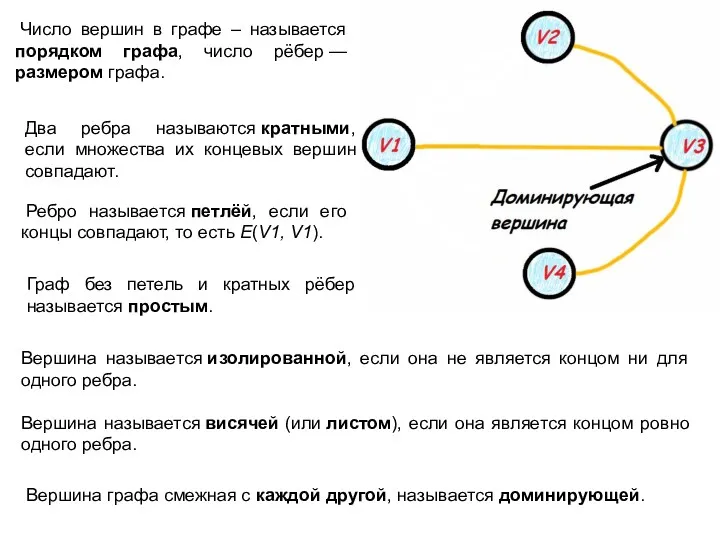
Число вершин в графе – называется порядком графа, число рёбер —размером графа.
Два
Число вершин в графе – называется порядком графа, число рёбер —размером графа.
Два
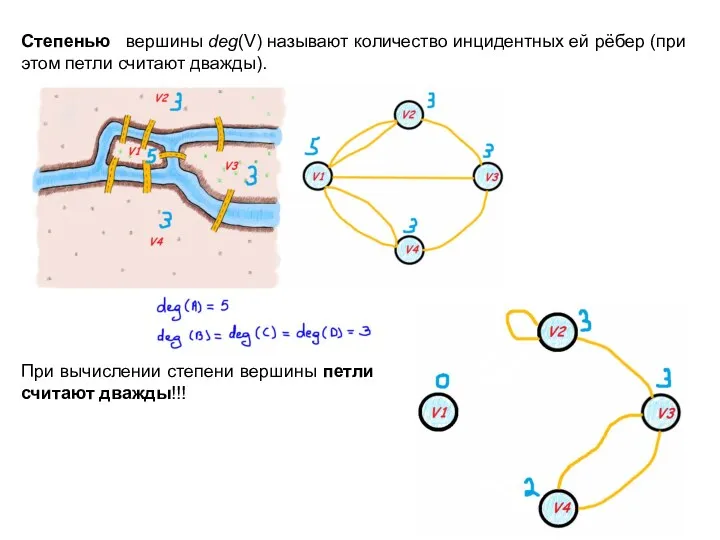
Степенью вершины deg(V) называют количество инцидентных ей рёбер (при этом петли считают
Степенью вершины deg(V) называют количество инцидентных ей рёбер (при этом петли считают
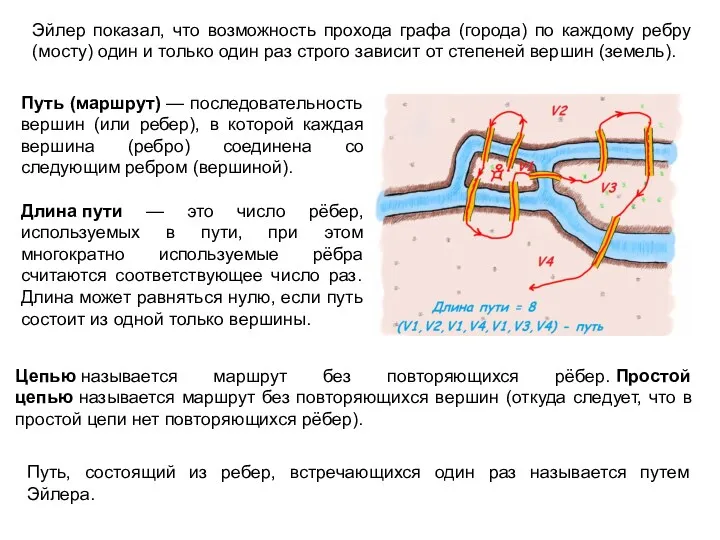
Эйлер показал, что возможность прохода графа (города) по каждому ребру (мосту)
Эйлер показал, что возможность прохода графа (города) по каждому ребру (мосту)
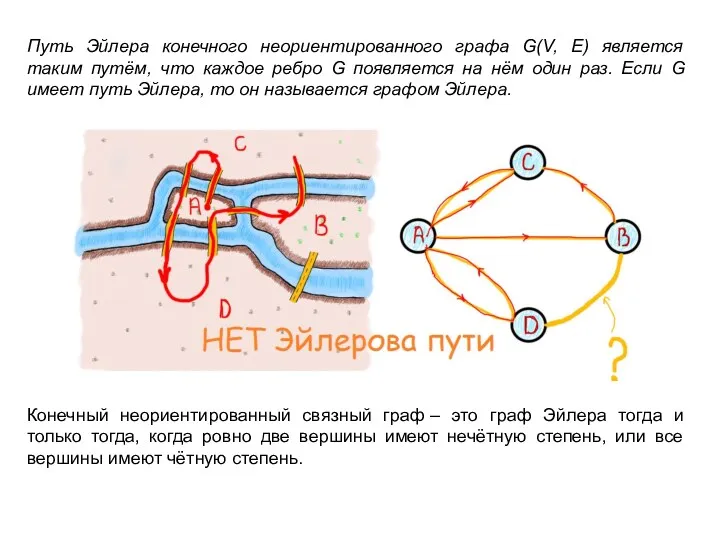
Конечный неориентированный связный граф – это граф Эйлера тогда и только тогда,
Конечный неориентированный связный граф – это граф Эйлера тогда и только тогда,
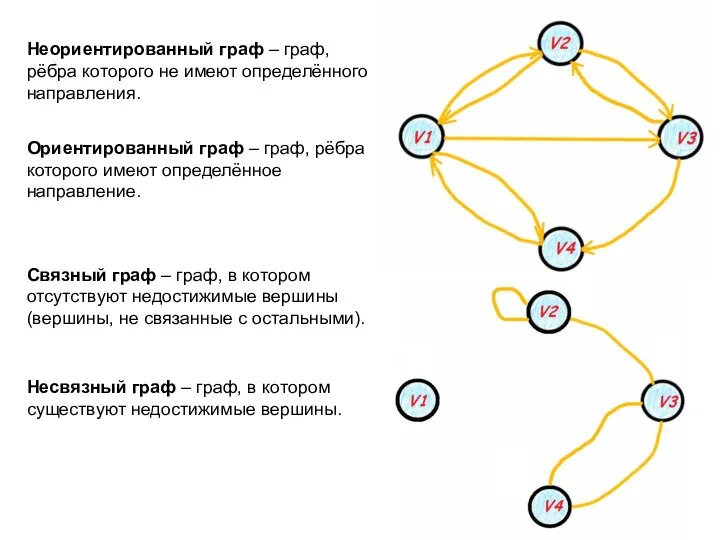
Связный граф – граф, в котором отсутствуют недостижимые вершины (вершины, не связанные
Связный граф – граф, в котором отсутствуют недостижимые вершины (вершины, не связанные

Пройди тест !!!
https://docs.google.com/forms/d/e/1FAIpQLSd8BT-EUkltIBKC9ucDppgRTHIss-P6OZ4ExEYwF4sX4GPLYQ/viewform?usp=sf_link
Пройди тест !!!
https://docs.google.com/forms/d/e/1FAIpQLSd8BT-EUkltIBKC9ucDppgRTHIss-P6OZ4ExEYwF4sX4GPLYQ/viewform?usp=sf_link
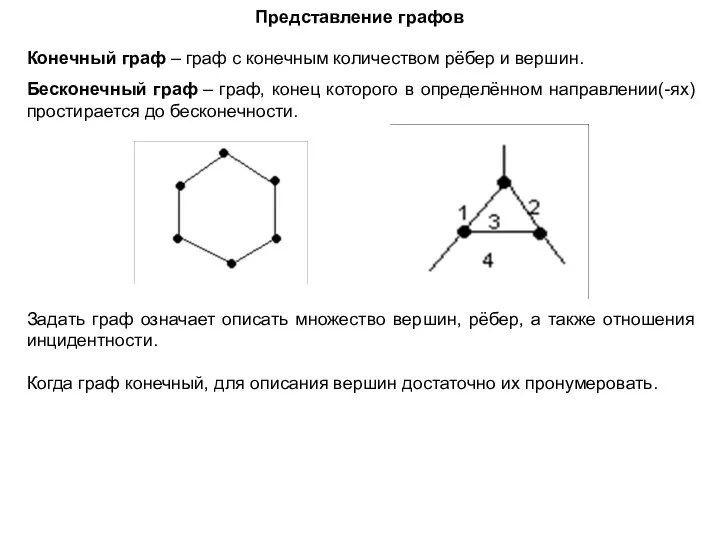
Конечный граф – граф с конечным количеством рёбер и вершин.
Бесконечный граф – граф,
Конечный граф – граф с конечным количеством рёбер и вершин.
Бесконечный граф – граф,
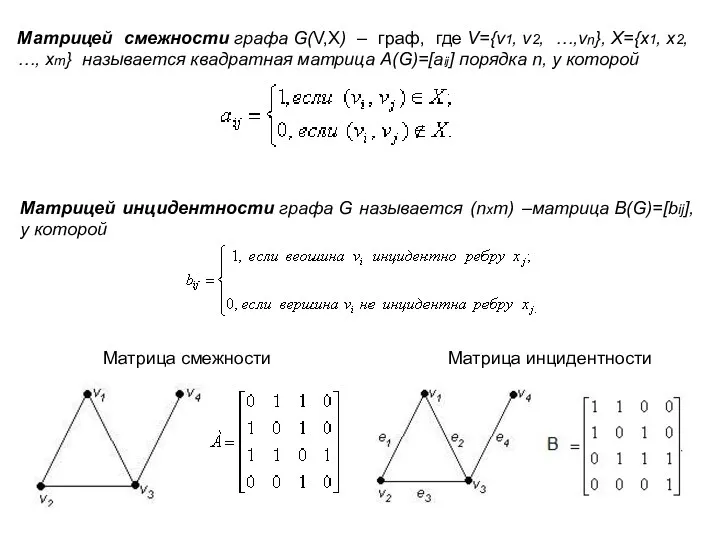
Матрицей смежности графа G(V,X) – граф, где V={v1, v2, …,vn}, X={x1, x2, …, xm} называется квадратная матрица A(G)=[aij] порядка n,
Матрицей смежности графа G(V,X) – граф, где V={v1, v2, …,vn}, X={x1, x2, …, xm} называется квадратная матрица A(G)=[aij] порядка n,
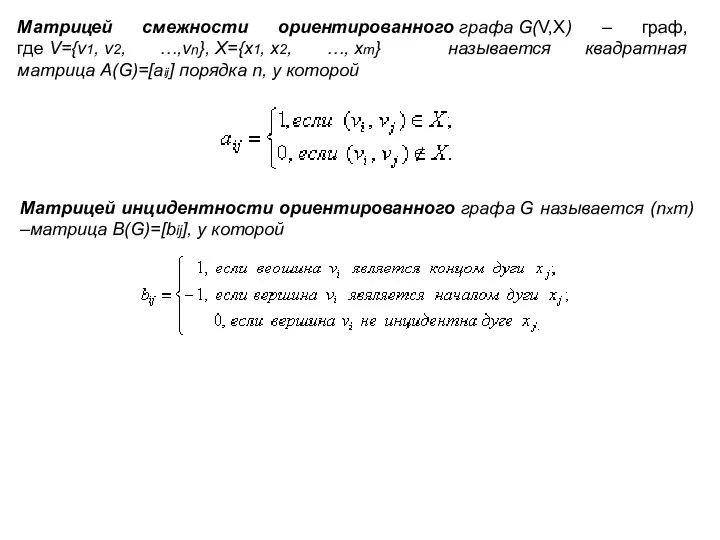
Матрицей смежности ориентированного графа G(V,X) – граф, где V={v1, v2, …,vn}, X={x1, x2, …, xm} называется квадратная матрица A(G)=[aij]
Матрицей смежности ориентированного графа G(V,X) – граф, где V={v1, v2, …,vn}, X={x1, x2, …, xm} называется квадратная матрица A(G)=[aij]
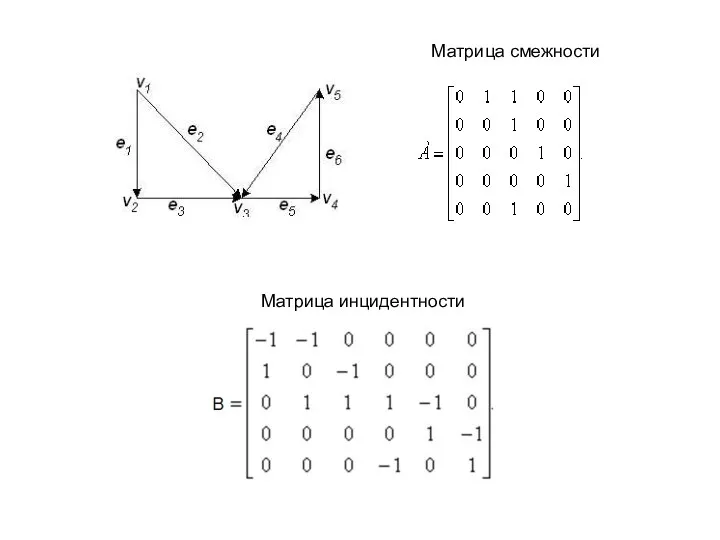
Матрица смежности
Матрица инцидентности
Матрица смежности
Матрица инцидентности
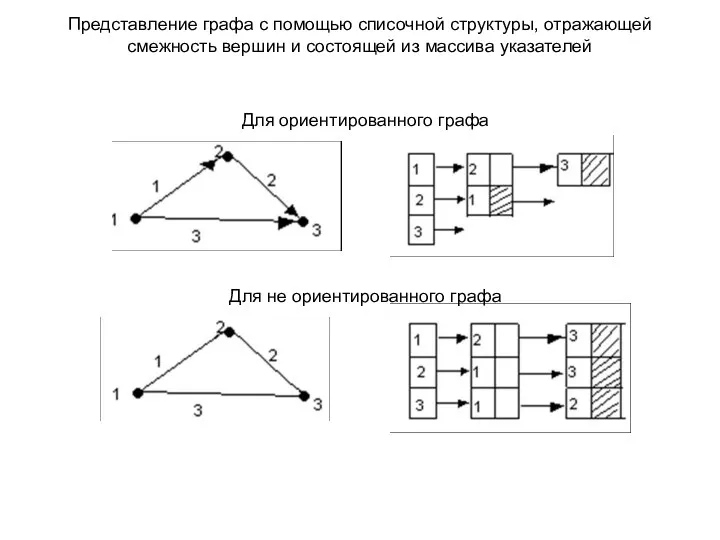
Представление графа с помощью списочной структуры, отражающей смежность вершин и состоящей
Представление графа с помощью списочной структуры, отражающей смежность вершин и состоящей
 Кызыклы Математика дидактик уеннар, презентация.
Кызыклы Математика дидактик уеннар, презентация. Решение задач на движение
Решение задач на движение Внеклассное мероприятие по информатике и математике. Викторина
Внеклассное мероприятие по информатике и математике. Викторина Действие деления. Свойства деления
Действие деления. Свойства деления Arithmetic fundamentals of number systems
Arithmetic fundamentals of number systems Методы многоскоростной обработки сигналов. Введение
Методы многоскоростной обработки сигналов. Введение Лекция 4. Основы математической статистики
Лекция 4. Основы математической статистики Десятичная запись дробных чисел
Десятичная запись дробных чисел Презентация открытого урока по математике в третьем классе на темуПлощадь прямоугольников
Презентация открытого урока по математике в третьем классе на темуПлощадь прямоугольников Устный счёт (4 класс)
Устный счёт (4 класс) Параллельность прямых и плоскостей в пространстве
Параллельность прямых и плоскостей в пространстве Параллелепипед
Параллелепипед Деление на двузначное число
Деление на двузначное число Описанная и вписанная окружности треугольника
Описанная и вписанная окружности треугольника Линейная функция. 7 класс
Линейная функция. 7 класс Задание №15 базового уровня. Равнобедренный треугольник: вычисление углов
Задание №15 базового уровня. Равнобедренный треугольник: вычисление углов Движение. Урок геометрии. 9 класс
Движение. Урок геометрии. 9 класс Как устроены числа.
Как устроены числа. Взаимное расположение прямой и окружности. 8 класс
Взаимное расположение прямой и окружности. 8 класс Вписанная и описанная окружности. 8 класс
Вписанная и описанная окружности. 8 класс Квадратные уравнения. Решение задач с помощью квадратных уравнений
Квадратные уравнения. Решение задач с помощью квадратных уравнений презентация к уроку математики во 2 классе по теме:Окружность, её центр и радиус УМК Начальная школа XXI века
презентация к уроку математики во 2 классе по теме:Окружность, её центр и радиус УМК Начальная школа XXI века Делим числа
Делим числа Несчетные множества. (Лекция 8)
Несчетные множества. (Лекция 8) Морской бой. Часть 1
Морской бой. Часть 1 Замечательные пределы
Замечательные пределы Соотношения между сторонами и углами прямоугольного треугольника
Соотношения между сторонами и углами прямоугольного треугольника Теорема об отрезках пересекающихся хорд
Теорема об отрезках пересекающихся хорд