- Математические основы теории систем. Анализ устойчивости систем по передаточной функции

Содержание
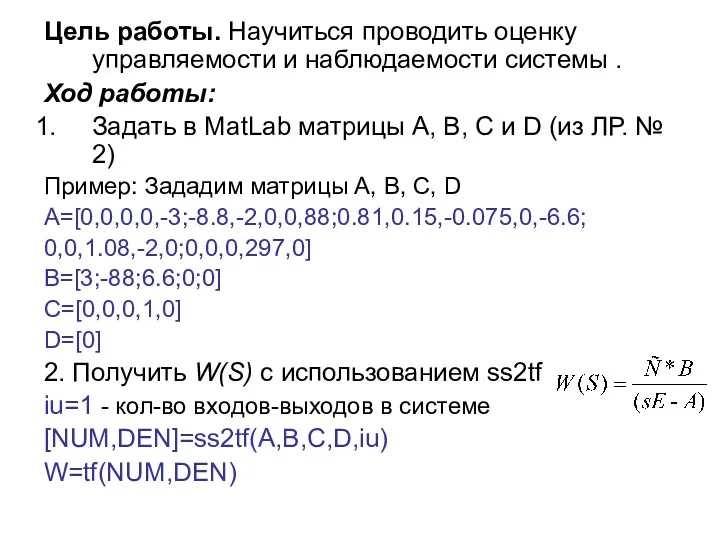
Цель работы. Научиться проводить оценку управляемости и наблюдаемости системы .
Ход работы:
Задать
Цель работы. Научиться проводить оценку управляемости и наблюдаемости системы .
Ход работы:
Задать
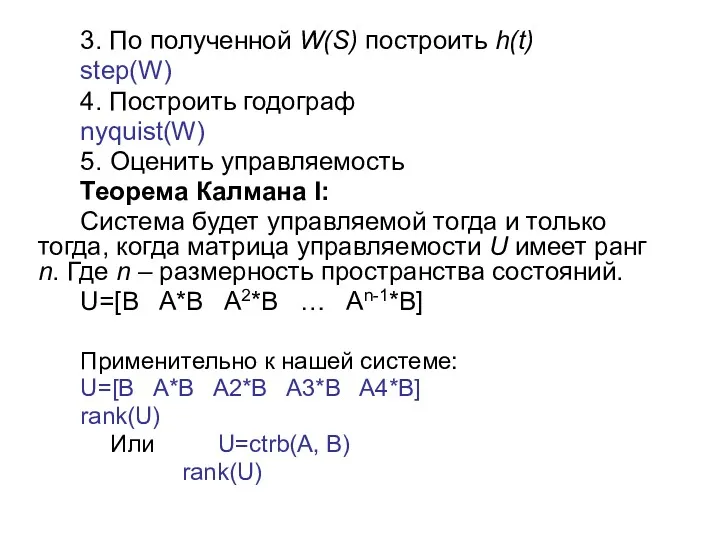
3. По полученной W(S) построить h(t)
step(W)
4. Построить годограф
nyquist(W)
5. Оценить управляемость
Теорема
3. По полученной W(S) построить h(t)
step(W)
4. Построить годограф
nyquist(W)
5. Оценить управляемость
Теорема
 Векторная алгебра (лекция 11)
Векторная алгебра (лекция 11)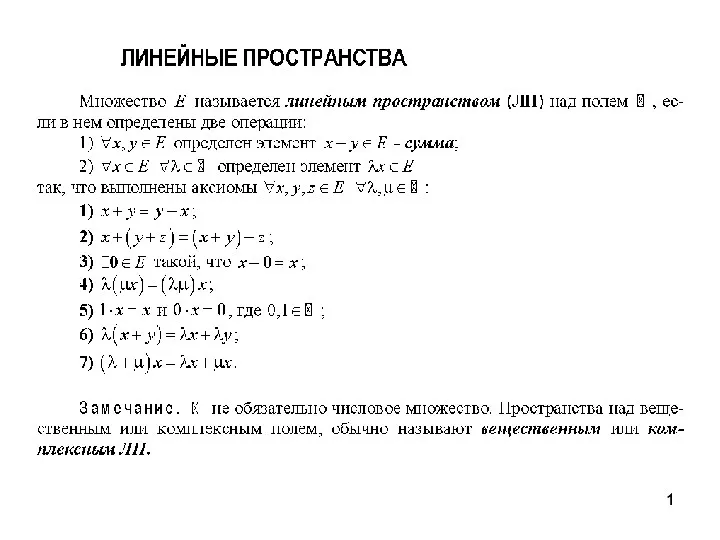 Линейные пространства. Нормированные пространства. Подпространства
Линейные пространства. Нормированные пространства. Подпространства Квадрат теңдеу және оның түбірлері
Квадрат теңдеу және оның түбірлері Нестандартные способы решения квадратных уравнений
Нестандартные способы решения квадратных уравнений Понятие призмы
Понятие призмы Неопределённость в измерениях
Неопределённость в измерениях презентация к занятию по ФЭМП для средней группы
презентация к занятию по ФЭМП для средней группы Тренажёр. Примеры в пределах 20. (1 класс)
Тренажёр. Примеры в пределах 20. (1 класс) Измерение углов
Измерение углов Логика предикатов
Логика предикатов Параллельные прямые. Школа доказательства
Параллельные прямые. Школа доказательства Последовательность. Лингво–математический урок
Последовательность. Лингво–математический урок Музична таблиця множення
Музична таблиця множення Решение задач по сумме и разности. Презентация.
Решение задач по сумме и разности. Презентация. Рациональные числа и действия над ними. 6 класс
Рациональные числа и действия над ними. 6 класс Безотметочное обучение в начальной школе
Безотметочное обучение в начальной школе Доли. Обыкновенные дроби
Доли. Обыкновенные дроби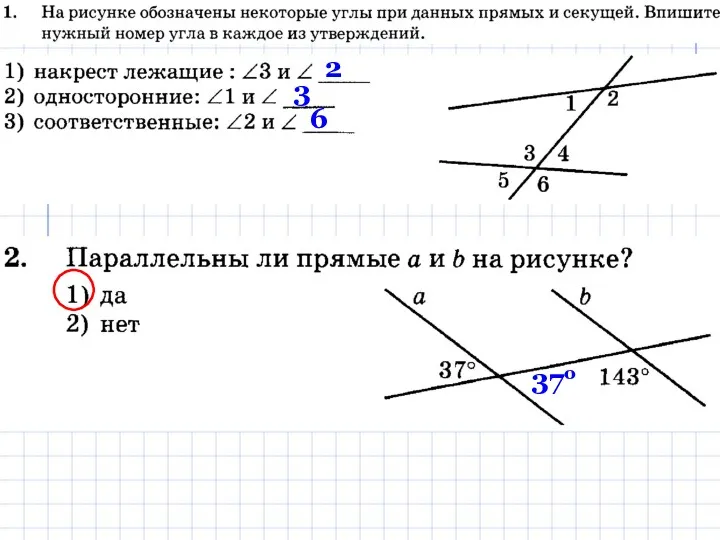 Аксиома параллельных прямых. Доказательство от противного
Аксиома параллельных прямых. Доказательство от противного Сonstructive problems and optimization
Сonstructive problems and optimization Приемы смыслового чтения при решении текстовых задач по математике
Приемы смыслового чтения при решении текстовых задач по математике Задачи на смекалку
Задачи на смекалку Окружность, хорда, диаметр
Окружность, хорда, диаметр Математика. 1 класс. Урок 16. Отрезок. Презентация
Математика. 1 класс. Урок 16. Отрезок. Презентация Применение производной к решению задач
Применение производной к решению задач Нумерация
Нумерация Презентация к уроку математики (Школа 2100 3 класс)
Презентация к уроку математики (Школа 2100 3 класс) Решение заданий В8 (часть 2) по материалам открытого банка задач ЕГЭ по математике
Решение заданий В8 (часть 2) по материалам открытого банка задач ЕГЭ по математике Счет предметов, математика, 1 класс
Счет предметов, математика, 1 класс