- Математическое моделирование

Содержание
- 2. Главные задачи проектирования систем Изучить структуру систем Выявить основные свойства систем Изучить принципы функционирования систем Прогнозировать
- 3. ЭКСПЕРИМЕНТЫ Огромное количество денег Много времени Опасно для жизни МОДЕЛИРОВАНИЕ
- 4. Общий подход математического моделирования
- 5. Примеры Проектирования ЛА – моделирование пространственного движения ЛА, моделирование работы двигателя … Проектирование инерциальной навигационной системы
- 6. Общая схема математического моделирования
- 7. Математическая модель Математическое представление взаимосвязи между входными воздействиями и выходными координатами явлений и процессов Упрощенное описанием
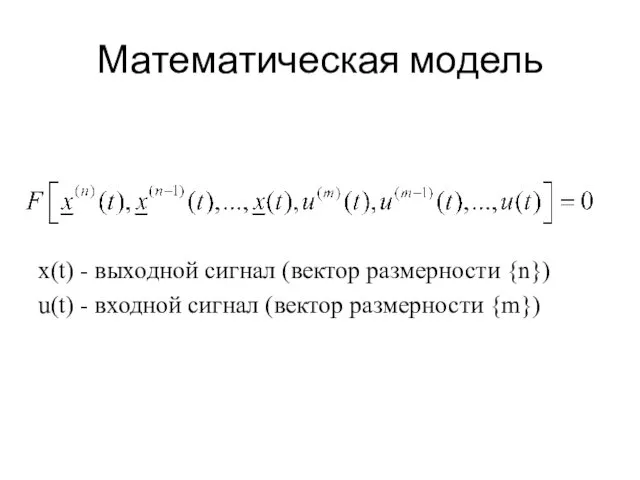
- 8. Математическая модель x(t) - выходной сигнал (вектор размерности {n}) u(t) - входной сигнал (вектор размерности {m})
- 9. Типы входных сигналов 1. Детерминированные – сигналы, понаблюдав которые, мы можем выявить алгоритм предсказания значения процесса
- 10. Типы модели Модели: непрерывные и дискретные по времени, сосредоточенные и распределенные, детерминированные или стохастические, линейные или
- 11. Способы построения ММ Разделение системы на подсистемы, «известные» на проведенных экспериментальных исследованиях Обработка входных и выходных
- 12. Математическое описание объектов управления
- 13. Математическое описание объектов управления
- 15. Скачать презентацию
Главные задачи проектирования систем
Изучить структуру систем
Выявить основные свойства систем
Изучить принципы функционирования
Главные задачи проектирования систем
Изучить структуру систем
Выявить основные свойства систем
Изучить принципы функционирования
ЭКСПЕРИМЕНТЫ
Огромное количество денег
Много времени
Опасно для жизни
МОДЕЛИРОВАНИЕ
ЭКСПЕРИМЕНТЫ
Огромное количество денег
Много времени
Опасно для жизни
МОДЕЛИРОВАНИЕ
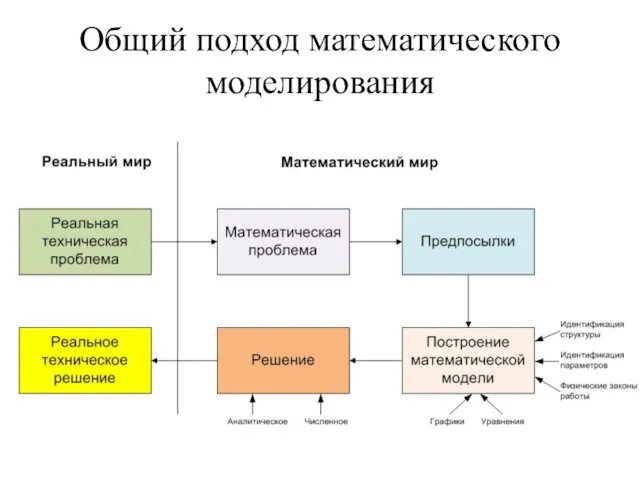
Общий подход математического моделирования
Общий подход математического моделирования
Примеры
Проектирования ЛА – моделирование пространственного движения ЛА, моделирование работы двигателя …
Проектирование
Примеры
Проектирования ЛА – моделирование пространственного движения ЛА, моделирование работы двигателя …
Проектирование
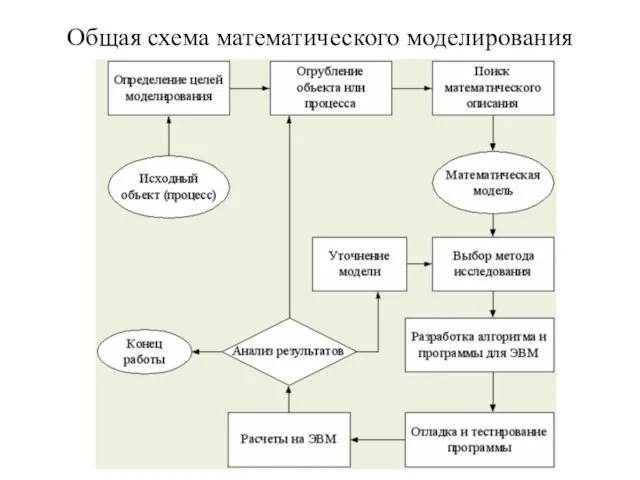
Общая схема математического моделирования
Общая схема математического моделирования
Математическая модель
Математическое представление взаимосвязи между входными воздействиями и выходными координатами явлений
Математическая модель
Математическое представление взаимосвязи между входными воздействиями и выходными координатами явлений
Математическая модель
x(t) - выходной сигнал (вектор размерности {n})
u(t) - входной сигнал
Математическая модель
x(t) - выходной сигнал (вектор размерности {n})
u(t) - входной сигнал
Типы входных сигналов
1. Детерминированные – сигналы, понаблюдав которые, мы можем выявить
Типы входных сигналов
1. Детерминированные – сигналы, понаблюдав которые, мы можем выявить
Типы модели
Модели: непрерывные и дискретные по времени, сосредоточенные и распределенные, детерминированные
Типы модели
Модели: непрерывные и дискретные по времени, сосредоточенные и распределенные, детерминированные
Способы построения ММ
Разделение системы на подсистемы, «известные» на проведенных экспериментальных исследованиях
Обработка
Способы построения ММ
Разделение системы на подсистемы, «известные» на проведенных экспериментальных исследованиях
Обработка
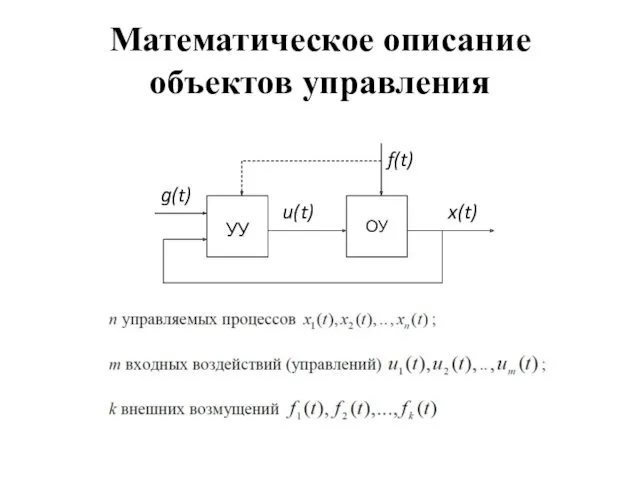
Математическое описание объектов управления
Математическое описание объектов управления

Математическое описание объектов управления
Математическое описание объектов управления
 Теорія похибок. Концепція невизначеності вимірювання
Теорія похибок. Концепція невизначеності вимірювання Теорема Виета. Разложение на множители квадратного трехчлена
Теорема Виета. Разложение на множители квадратного трехчлена Приёмы письменного деления на однозначное число
Приёмы письменного деления на однозначное число Множества. Отношения между множествами
Множества. Отношения между множествами Функция. Область определения и область значений функции
Функция. Область определения и область значений функции Касательная. Уравнение касательной. 10 класс
Касательная. Уравнение касательной. 10 класс Задачи на движение
Задачи на движение Счет от 1 до 10. Нумерация. Интерактивный плакат (математика, 1 класс).
Счет от 1 до 10. Нумерация. Интерактивный плакат (математика, 1 класс). Математика. Повторение
Математика. Повторение Урок математики в 4 классе
Урок математики в 4 классе Простейшие показательные и логарифмические уравнения и неравенства
Простейшие показательные и логарифмические уравнения и неравенства proizvodnaya-slozhnoy-funkcii
proizvodnaya-slozhnoy-funkcii Умножение и деление обыкновенных дробей
Умножение и деление обыкновенных дробей Теорія ймовірності. (11 клас)
Теорія ймовірності. (11 клас) Квадратные уравнения: от истоков к современности
Квадратные уравнения: от истоков к современности Функцияны туынды арқылы зерттеу
Функцияны туынды арқылы зерттеу Многоугольники. Ломаная
Многоугольники. Ломаная Головоломка Танграм
Головоломка Танграм Математическая смекалка. Внеклассное мероприятие для проведения в пришкольном лагере для учащихся с 1 - 5 класс
Математическая смекалка. Внеклассное мероприятие для проведения в пришкольном лагере для учащихся с 1 - 5 класс 20231010_otkr.urok_8kl_teorma_pifagora
20231010_otkr.urok_8kl_teorma_pifagora Дискретная случайная величина, закон ее распределения
Дискретная случайная величина, закон ее распределения Тест по теме: Призма. Часть 2. Вариант 2
Тест по теме: Призма. Часть 2. Вариант 2 Соотношения между сторонами и углами прямоугольного треугольника
Соотношения между сторонами и углами прямоугольного треугольника Умножение обыкновенных дробей. Модульный урок. 6 класс
Умножение обыкновенных дробей. Модульный урок. 6 класс Арифметика Магницкого
Арифметика Магницкого Презентация к уроку математики Признаки предметов. Построение таблиц или ряда предметов по определенному правилу.
Презентация к уроку математики Признаки предметов. Построение таблиц или ряда предметов по определенному правилу. Простые дроби
Простые дроби Деление с остатком. 6 класс
Деление с остатком. 6 класс