Методы оптимальных решений № 1. Задачи линейного программирования и графический метод решения презентация
- Методы оптимальных решений № 1. Задачи линейного программирования и графический метод решения

Содержание
- 2. МЕТОДЫ ОПТИМАЛЬНЫХ РЕШЕНИЙ ТЕМА № 1 Линейное программирование (лекция) Преподаватель: Ларионов Владимир Борисович к.т.н.. Контакты: lvb_imes@mail.ru
- 3. 1. Задачи математического программирования Экстремальными называются задачи, в которых ставится цель – достигнуть наибольшего или наименьшего
- 4. 1. Задачи математического программирования Различают: Линейное программирование, в котором и система ограничений и целевая функция линейны.
- 5. 1. Задачи математического программирования Наряду с приведенными выше однокритериальными задачами (имеющими одну целевую функцию) часто встречаются
- 6. 2. Различные формы задач линейного программирования Различают три основные формы ЗЛП: 1) Стандартная ЗЛП имеет вид:
- 7. 2. Различные формы задач линейного программирования Теорема. Все эти задачи эквивалентны. Замечание: Любую ЗЛП можно свести
- 8. Пример 1 Привести задачу линейного программирования к каноническому виду. РЕШЕНИЕ. Неравенство представим в виде равенства путем
- 9. Пример 1 (продолжение) Получим каноническую задачу линейного программирования:
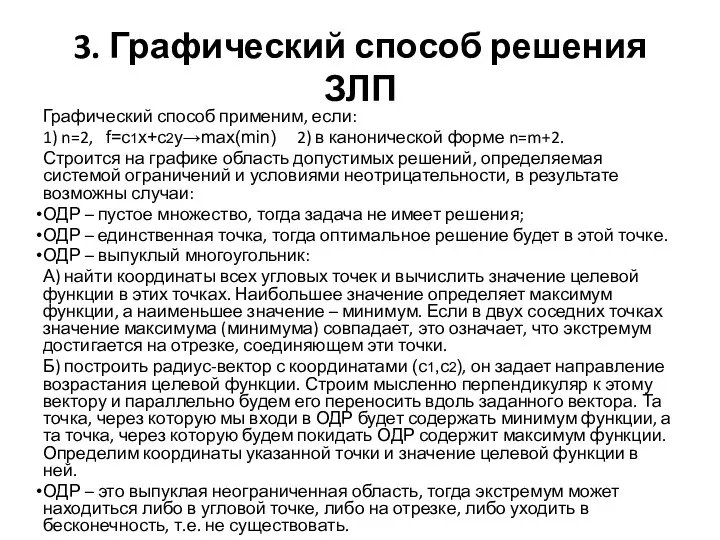
- 10. 3. Графический способ решения ЗЛП Графический способ применим, если: 1) n=2, f=c1x+c2y→max(min) 2) в канонической форме
- 11. Пример 2 Найти графическим методом решение задачи линейного программирования РЕШЕНИЕ. Преобразуем систему ограничений к виду
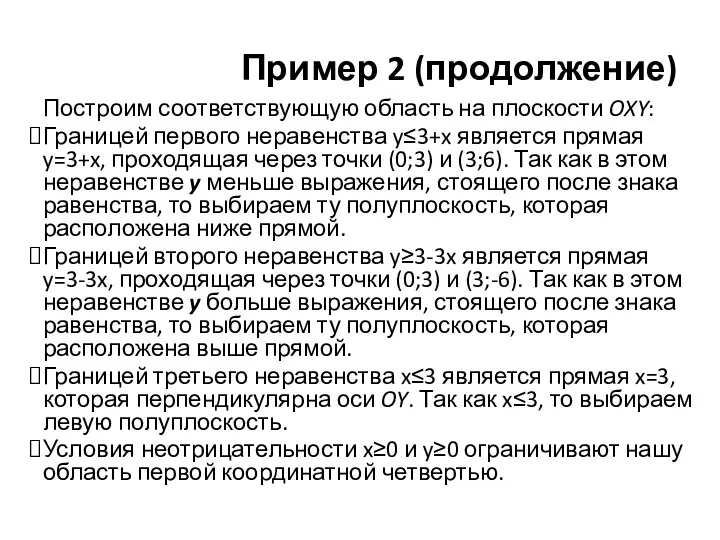
- 12. Пример 2 (продолжение) Построим соответствующую область на плоскости OXY: Границей первого неравенства y≤3+x является прямая y=3+x,
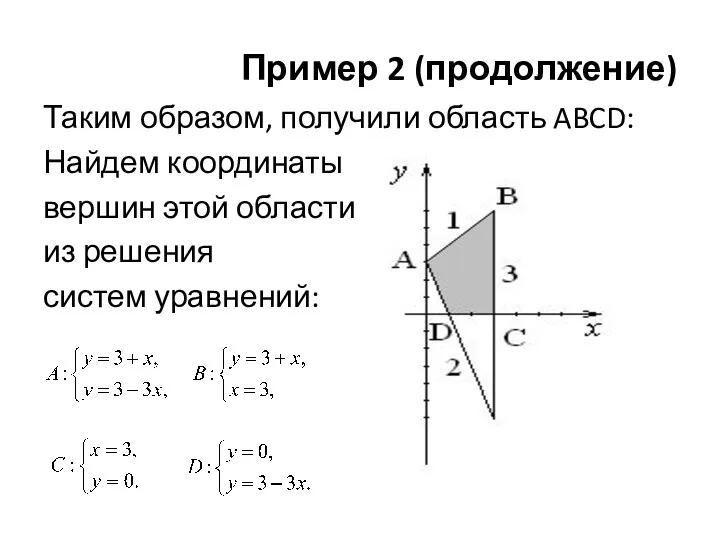
- 13. Пример 2 (продолжение) Таким образом, получили область ABCD: Найдем координаты вершин этой области из решения систем
- 14. Пример 2 (продолжение) Решим системы:
- 15. Пример 2 (продолжение) Вычислим значения целевой функции f=2x-3y в вершинах области: f(A)=2∙0-3∙3=-9, f(B)=2∙3-3∙6=6-18=-12, f(C)=2∙3-3∙0=6, f(D)=2∙1-3∙0=2. Очевидно,
- 16. Пример 3 Решить графическим способом ЗЛП, имеющую более 2-х переменных: Эта задача имеет канонический вид, причем
- 17. Пример 3 (продолжение) РЕШЕНИЕ. Очевидно, что в качестве базисных переменных будут (они входят каждое только в
- 18. Пример 3 (продолжение) Так как все переменные , получим Из этих неравенств выразим переменную через :
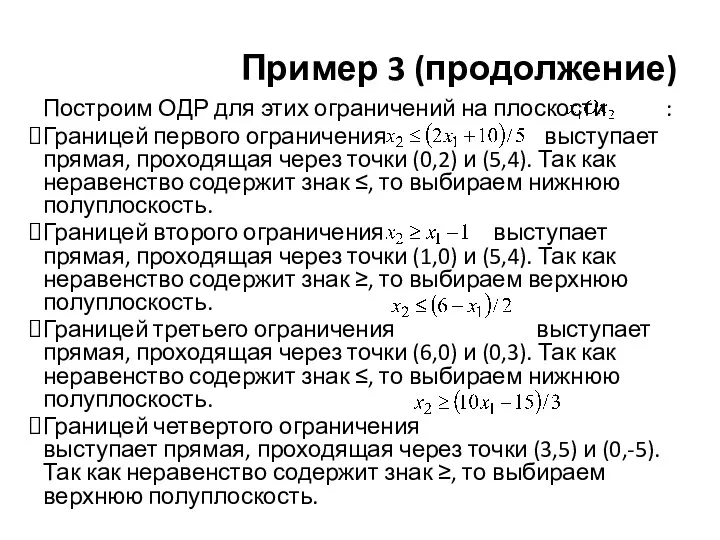
- 19. Пример 3 (продолжение) Построим ОДР для этих ограничений на плоскости : Границей первого ограничения выступает прямая,
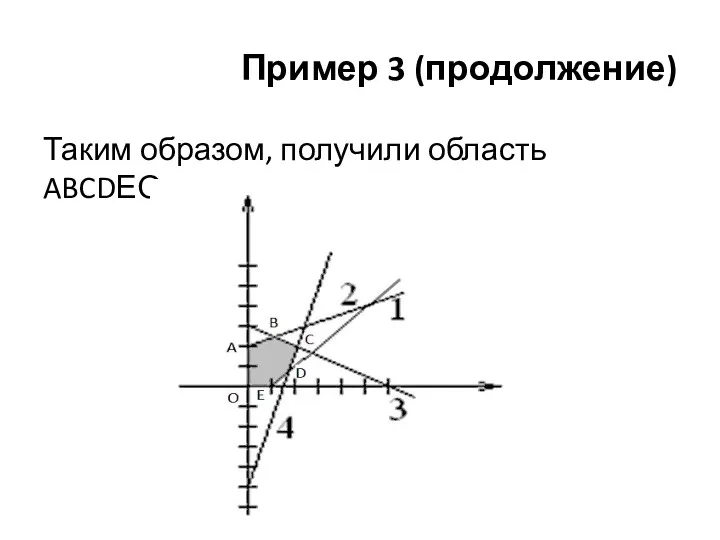
- 20. Пример 3 (продолжение) Таким образом, получили область ABCDЕО:
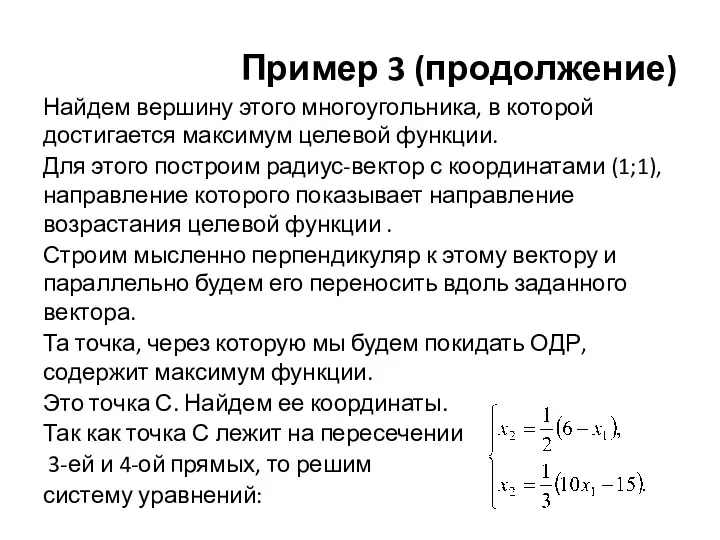
- 21. Пример 3 (продолжение) Найдем вершину этого многоугольника, в которой достигается максимум целевой функции. Для этого построим
- 22. Пример 3 (продолжение) В результате и
- 23. Тестовые вопросы 1. Максимальное значение целевой функции при ограничениях равно … А) 6 Б) 10 В)
- 24. Тестовые вопросы 2. Область допустимых решений задачи линейного программирования имеет вид: Тогда максимальное значение функции равно
- 25. Тестовые вопросы 3. Минимальное значение целевой функции при ограничениях равно … А) 8 Б) 10 В)
- 26. Тестовые вопросы 4. Математическая дисциплина, занимающаяся изучением экстремальных задач и разработкой методов их решения, называется …
- 27. Тестовые вопросы 6. Задача вида является … канонической ЗЛП общей ЗЛП стандартной ЗЛП задачей нелинейного программирования
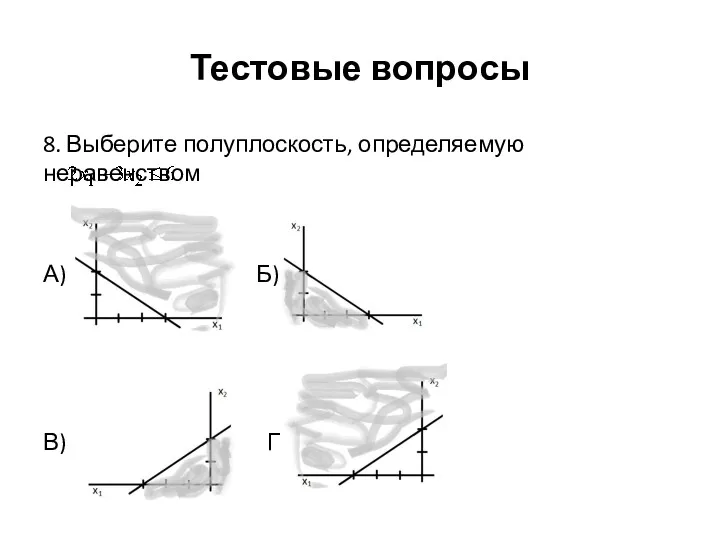
- 28. Тестовые вопросы 8. Выберите полуплоскость, определяемую неравенством А) Б) В) Г)
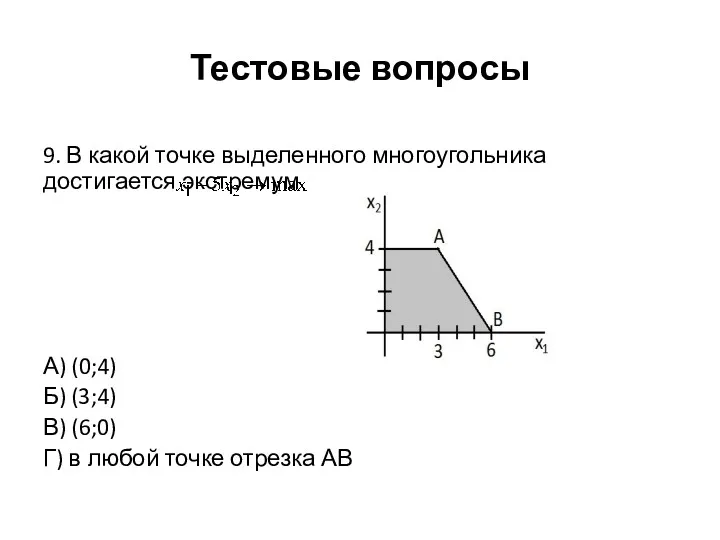
- 29. Тестовые вопросы 9. В какой точке выделенного многоугольника достигается экстремум А) (0;4) Б) (3;4) В) (6;0)
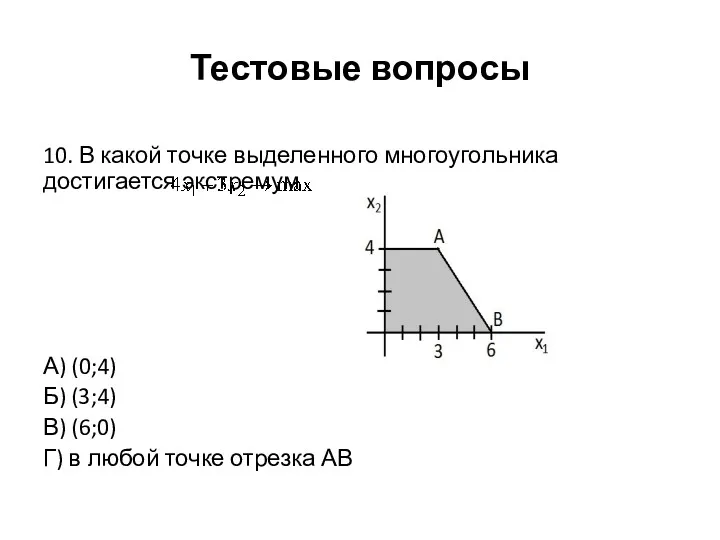
- 30. Тестовые вопросы 10. В какой точке выделенного многоугольника достигается экстремум А) (0;4) Б) (3;4) В) (6;0)
- 32. Скачать презентацию
МЕТОДЫ ОПТИМАЛЬНЫХ РЕШЕНИЙ
ТЕМА № 1 Линейное программирование
(лекция)
Преподаватель: Ларионов Владимир
ТЕМА № 1 Линейное программирование (лекция)
Преподаватель: Ларионов Владимир
1. Задачи математического программирования
Экстремальными называются задачи, в которых ставится цель –
1. Задачи математического программирования
Экстремальными называются задачи, в которых ставится цель –
1. Задачи математического программирования
Различают:
Линейное программирование, в котором и система ограничений и
1. Задачи математического программирования
Различают:
Линейное программирование, в котором и система ограничений и
1. Задачи математического программирования
Наряду с приведенными выше однокритериальными задачами (имеющими одну
1. Задачи математического программирования
Наряду с приведенными выше однокритериальными задачами (имеющими одну
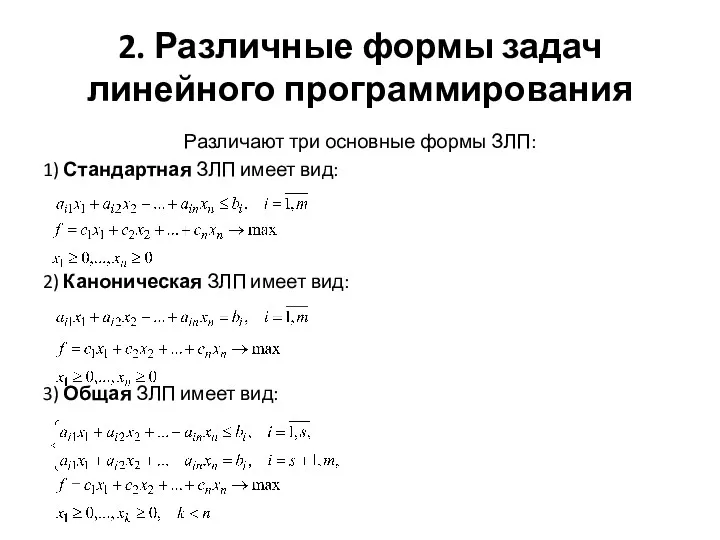
2. Различные формы задач линейного программирования
Различают три основные формы ЗЛП:
1) Стандартная
2. Различные формы задач линейного программирования
Различают три основные формы ЗЛП:
1) Стандартная
2. Различные формы задач линейного программирования
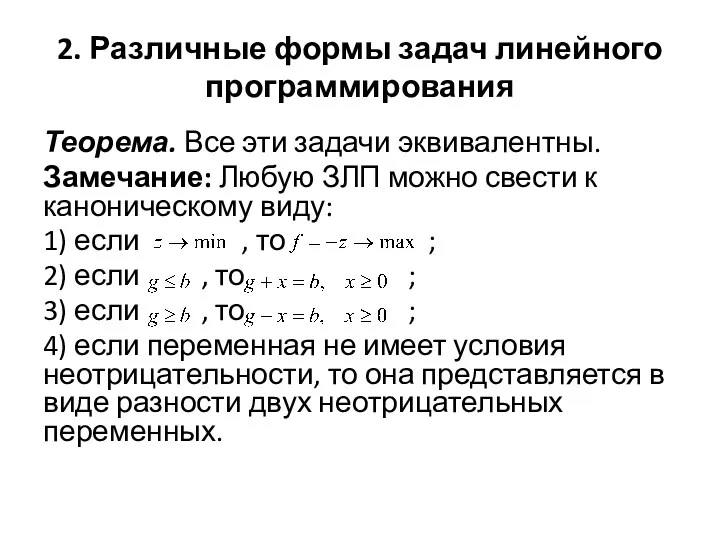
Теорема. Все эти задачи эквивалентны.
Замечание: Любую
2. Различные формы задач линейного программирования
Теорема. Все эти задачи эквивалентны.
Замечание: Любую
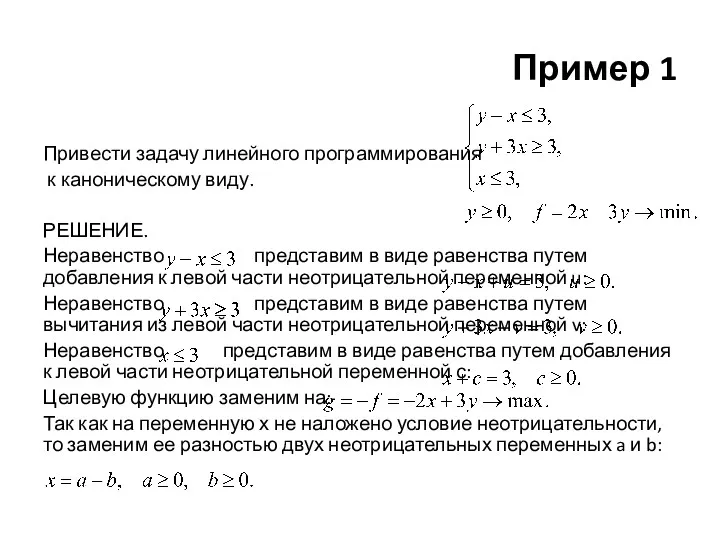
Пример 1
Привести задачу линейного программирования
к каноническому виду.
РЕШЕНИЕ.
Неравенство представим в виде
Пример 1
Привести задачу линейного программирования
к каноническому виду.
РЕШЕНИЕ.
Неравенство представим в виде
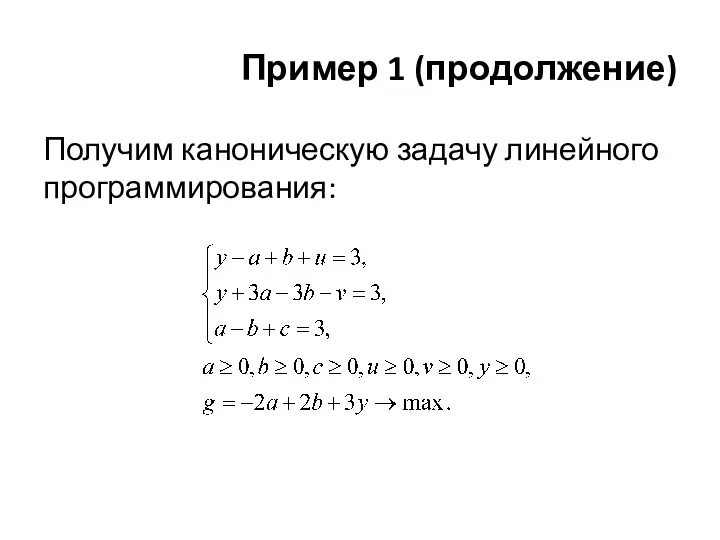
Пример 1 (продолжение)
Получим каноническую задачу линейного программирования:
Пример 1 (продолжение)
Получим каноническую задачу линейного программирования:
3. Графический способ решения ЗЛП
Графический способ применим, если:
1) n=2, f=c1x+c2y→max(min) 2)
3. Графический способ решения ЗЛП
Графический способ применим, если:
1) n=2, f=c1x+c2y→max(min) 2)
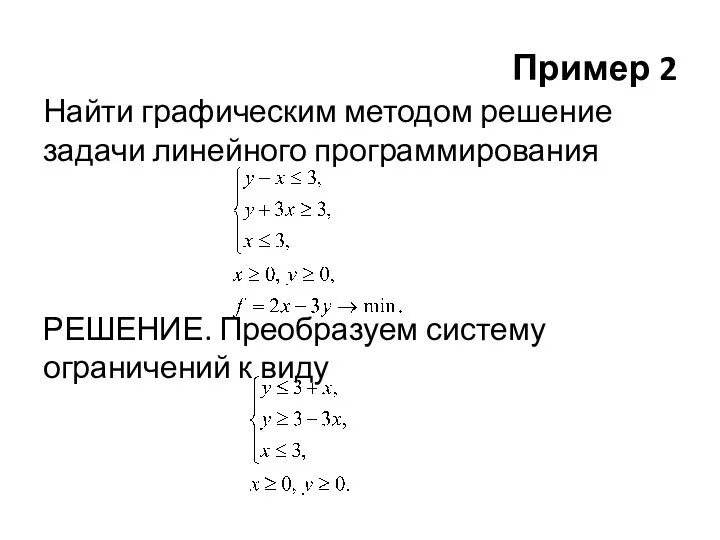
Пример 2
Найти графическим методом решение задачи линейного программирования
РЕШЕНИЕ. Преобразуем систему ограничений
Пример 2
Найти графическим методом решение задачи линейного программирования
РЕШЕНИЕ. Преобразуем систему ограничений
Пример 2 (продолжение)
Построим соответствующую область на плоскости OXY:
Границей первого неравенства
Пример 2 (продолжение)
Построим соответствующую область на плоскости OXY:
Границей первого неравенства
Пример 2 (продолжение)
Таким образом, получили область ABCD:
Найдем координаты
вершин этой области
Пример 2 (продолжение)
Таким образом, получили область ABCD:
Найдем координаты
вершин этой области
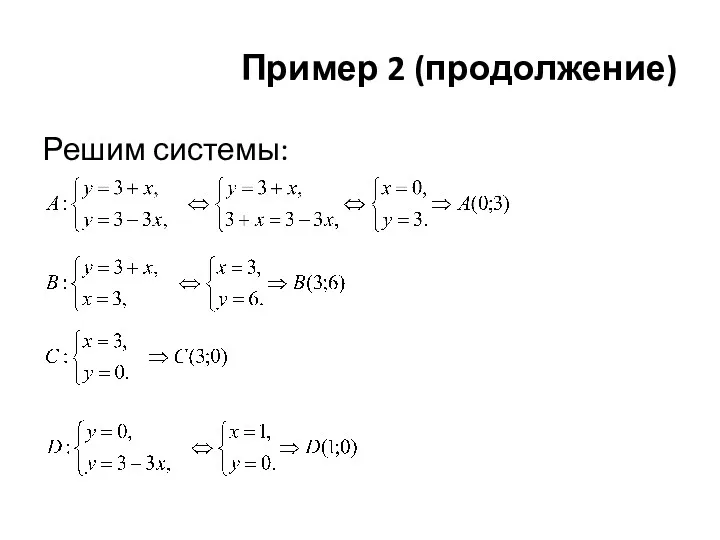
Пример 2 (продолжение)
Решим системы:
Пример 2 (продолжение)
Решим системы:
Пример 2 (продолжение)
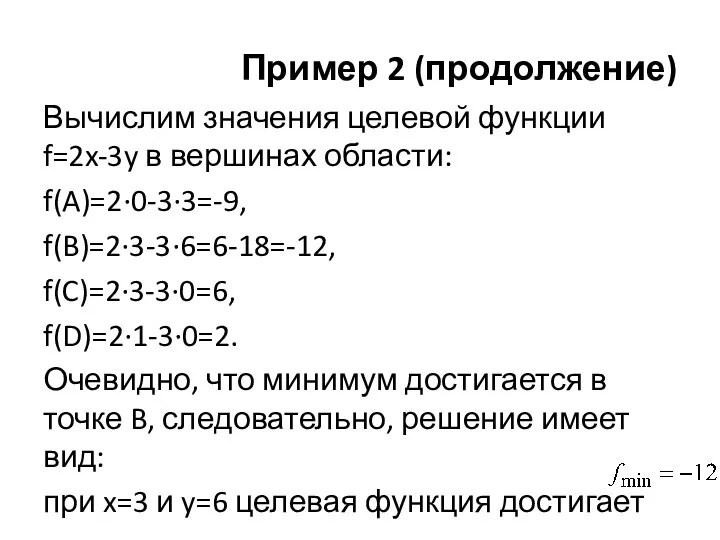
Вычислим значения целевой функции f=2x-3y в вершинах области:
f(A)=2∙0-3∙3=-9,
f(B)=2∙3-3∙6=6-18=-12,
f(C)=2∙3-3∙0=6,
f(D)=2∙1-3∙0=2.
Очевидно, что
Пример 2 (продолжение)
Вычислим значения целевой функции f=2x-3y в вершинах области:
f(A)=2∙0-3∙3=-9,
f(B)=2∙3-3∙6=6-18=-12,
f(C)=2∙3-3∙0=6,
f(D)=2∙1-3∙0=2.
Очевидно, что
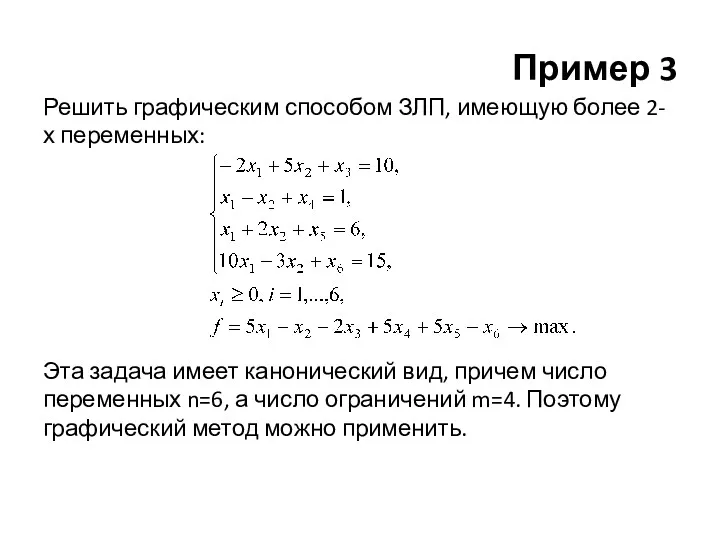
Пример 3
Решить графическим способом ЗЛП, имеющую более 2-х переменных:
Эта задача имеет
Пример 3
Решить графическим способом ЗЛП, имеющую более 2-х переменных:
Эта задача имеет
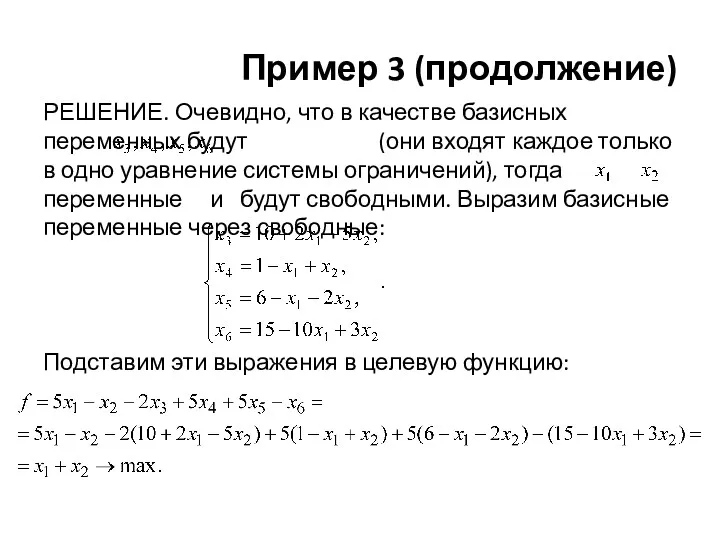
Пример 3 (продолжение)
РЕШЕНИЕ. Очевидно, что в качестве базисных переменных будут (они
Пример 3 (продолжение)
РЕШЕНИЕ. Очевидно, что в качестве базисных переменных будут (они
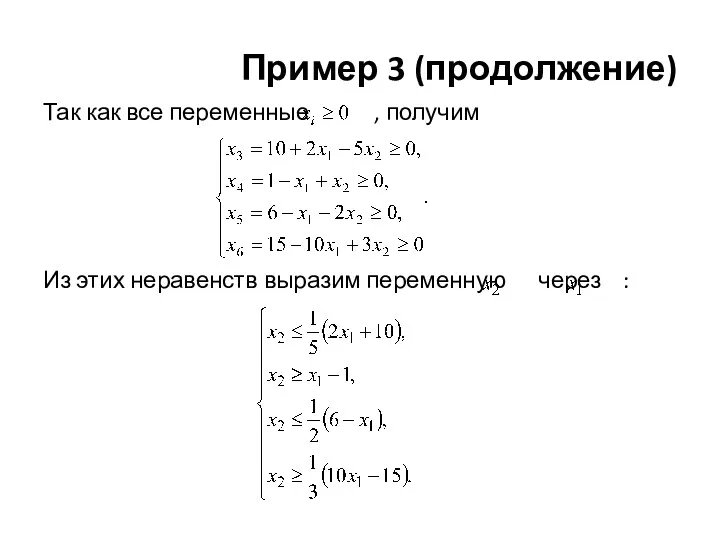
Пример 3 (продолжение)
Так как все переменные , получим
Из этих неравенств выразим
Пример 3 (продолжение)
Так как все переменные , получим
Из этих неравенств выразим
Пример 3 (продолжение)
Построим ОДР для этих ограничений на плоскости :
Границей
Пример 3 (продолжение)
Построим ОДР для этих ограничений на плоскости :
Границей
Пример 3 (продолжение)
Таким образом, получили область ABCDЕО:
Пример 3 (продолжение)
Таким образом, получили область ABCDЕО:
Пример 3 (продолжение)
Найдем вершину этого многоугольника, в которой достигается максимум целевой
Пример 3 (продолжение)
Найдем вершину этого многоугольника, в которой достигается максимум целевой
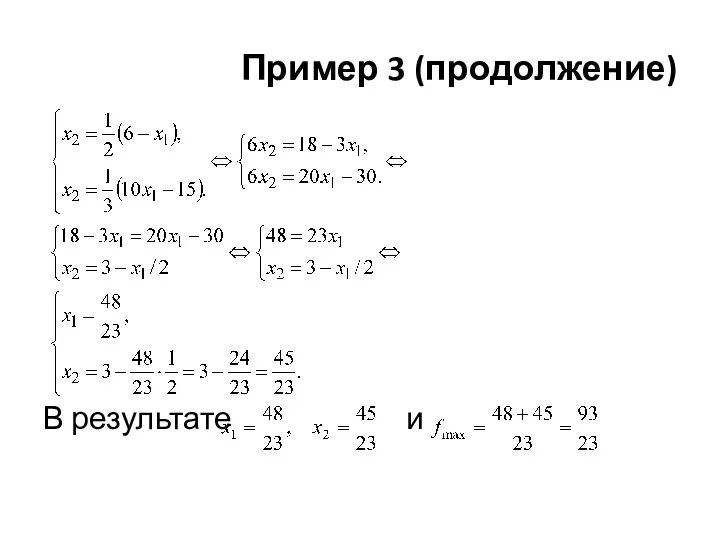
Пример 3 (продолжение)
В результате и
Пример 3 (продолжение)
В результате и
Тестовые вопросы
1. Максимальное значение целевой функции при ограничениях
равно …
А)
Тестовые вопросы
1. Максимальное значение целевой функции при ограничениях
равно …
А)
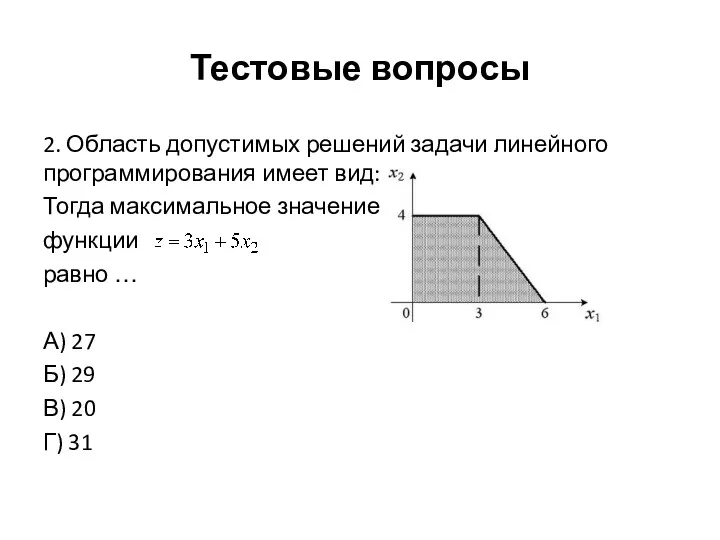
Тестовые вопросы
2. Область допустимых решений задачи линейного программирования имеет вид:
Тогда максимальное
Тестовые вопросы
2. Область допустимых решений задачи линейного программирования имеет вид:
Тогда максимальное
Тестовые вопросы
3. Минимальное значение целевой функции при ограничениях равно …
А) 8
Б)
Тестовые вопросы
3. Минимальное значение целевой функции при ограничениях равно …
А) 8
Б)
Тестовые вопросы
4. Математическая дисциплина, занимающаяся изучением экстремальных задач и разработкой методов
Тестовые вопросы
4. Математическая дисциплина, занимающаяся изучением экстремальных задач и разработкой методов
Тестовые вопросы
6. Задача вида
является …
канонической ЗЛП
общей ЗЛП
стандартной ЗЛП
задачей нелинейного программирования
7. Множество
Тестовые вопросы
6. Задача вида
является …
канонической ЗЛП
общей ЗЛП
стандартной ЗЛП
задачей нелинейного программирования
7. Множество
Тестовые вопросы
8. Выберите полуплоскость, определяемую неравенством
А) Б)
В) Г)
Тестовые вопросы
8. Выберите полуплоскость, определяемую неравенством
А) Б)
В) Г)
Тестовые вопросы
9. В какой точке выделенного многоугольника достигается экстремум
А) (0;4)
Б)
Тестовые вопросы
9. В какой точке выделенного многоугольника достигается экстремум
А) (0;4)
Б)
Тестовые вопросы
10. В какой точке выделенного многоугольника достигается экстремум
А) (0;4)
Б)
Тестовые вопросы
10. В какой точке выделенного многоугольника достигается экстремум
А) (0;4)
Б)
 Площадь. Единицы измерения площадей
Площадь. Единицы измерения площадей Решение задач на увеличение и уменьшение в несколько раз
Решение задач на увеличение и уменьшение в несколько раз Деление и умножение алгебраических дробей. 7 класс алгебра
Деление и умножение алгебраических дробей. 7 класс алгебра Арифметический квадратный корень. Задания для устного счета
Арифметический квадратный корень. Задания для устного счета Приемы быстрого счета
Приемы быстрого счета Вычисление значения числа π
Вычисление значения числа π Алгебраические дроби, сокращение дробей. (Алгебра, 7 класс.)
Алгебраические дроби, сокращение дробей. (Алгебра, 7 класс.) Приёмы письменного деления на однозначное число
Приёмы письменного деления на однозначное число Электронный справочник. Тригонометрические формулы
Электронный справочник. Тригонометрические формулы Системная подготовка к ЕГЭ на уроках математики
Системная подготовка к ЕГЭ на уроках математики Решение уравнений
Решение уравнений Методика решения задач Задача на встречное движение
Методика решения задач Задача на встречное движение Конус. Виды конусов. Сечения конуса
Конус. Виды конусов. Сечения конуса Как сравнивать многозначные числа
Как сравнивать многозначные числа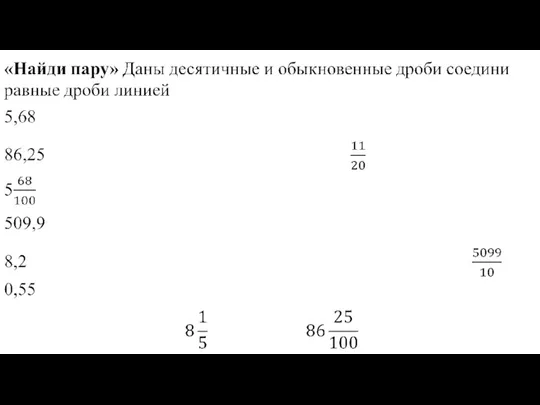 Десятичные дроби
Десятичные дроби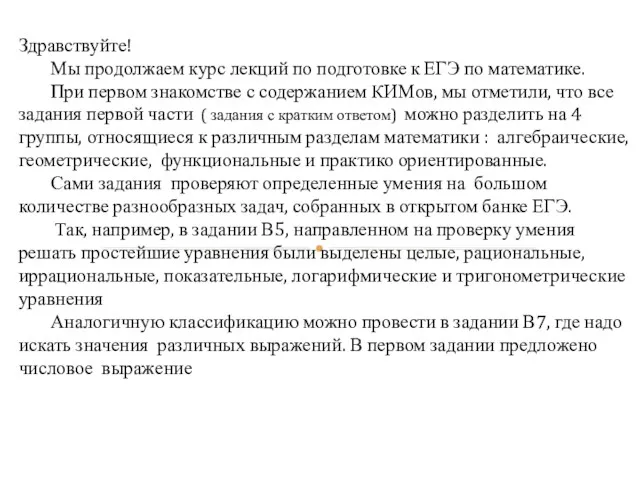 Задание В5, открытого банка ЕГЭ по математике
Задание В5, открытого банка ЕГЭ по математике Целеполагание как этап современного урока в условиях ФГОС
Целеполагание как этап современного урока в условиях ФГОС Методы разложения многочленов на множители
Методы разложения многочленов на множители Построение математической модели. Вычислительный эксперимент
Построение математической модели. Вычислительный эксперимент Признаки параллельности прямых
Признаки параллельности прямых Задачи на умножение и деление
Задачи на умножение и деление 20231019_zanimatelnaya_matematika
20231019_zanimatelnaya_matematika Решение неравенств с одной переменной. 8 класс
Решение неравенств с одной переменной. 8 класс Проценты. Математический диктант
Проценты. Математический диктант Среднее арифметическое чисел
Среднее арифметическое чисел Квадратичная функция. Итоговый урок
Квадратичная функция. Итоговый урок Весёлый счет.
Весёлый счет. Правильная четырехугольная пирамида. Задача. Подготовка к ЕГЭ С2
Правильная четырехугольная пирамида. Задача. Подготовка к ЕГЭ С2