- Оператор свертки

Содержание
- 2. Обычно сигнал представляется функцией от времени, то есть аргументом является вещественная переменная t. Пусть на вход
- 3. Преобразование будем записывать в виде y(t) = F[x(t)], F переводит функции x(t) в функцию y(t). Преобразование
- 4. В реальной ситуации ядро обычно не равно нулю только на некотором отрезке [0, M], поэтому свертка
- 5. Следовательно, при t Для каждого момента времени t0 функция y(t0) зависит от функции x(t) во все
- 6. В общем виде математический оператор свертки действует на интервале t (-∞, +∞) В этой записи свертка
- 7. Изображение тоже можно рассматривать как двумерный сигнал. Определим оператор свертки для изображения, рассмотрим простейший случай, когда
- 8. Если маска свертки равна 1. Свертка сигналов то новое значение gi,j интенсивности пискеля (i, j) будет
- 9. Свертка изображения с маской 3х3 1. Свертка сигналов
- 10. Оператор свертки с маской 3х3 пробегает по всем пиксе-лям исходного изображения, кроме граничных, изменяя яркость пикселя
- 11. Оператор свертки с маской 3х3 пробегает по всем пиксе-лям исходного изображения, кроме граничных, изменяя яркость пикселя
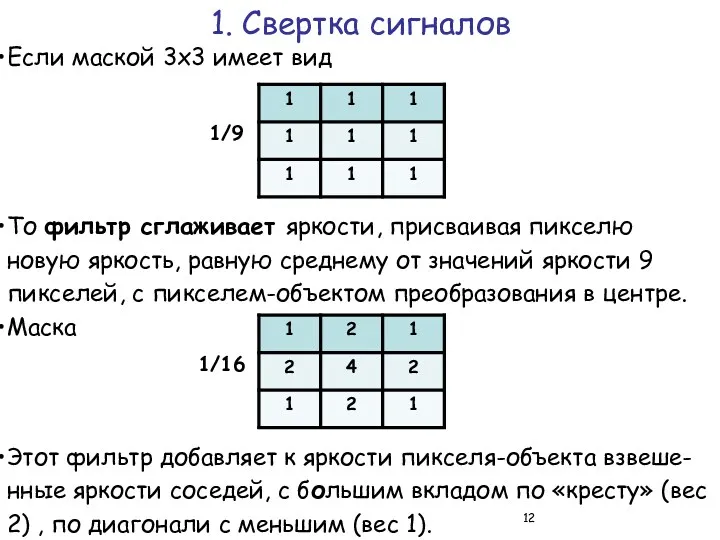
- 12. Если маской 3х3 имеет вид 1. Свертка сигналов 1/16 То фильтр сглаживает яркости, присваивая пикселю новую
- 13. 1. Свертка сигналов Горизонтальный фильтр Собела выделяет горизонталь-ные грани на изображении Например, Исходное изображение После свертки
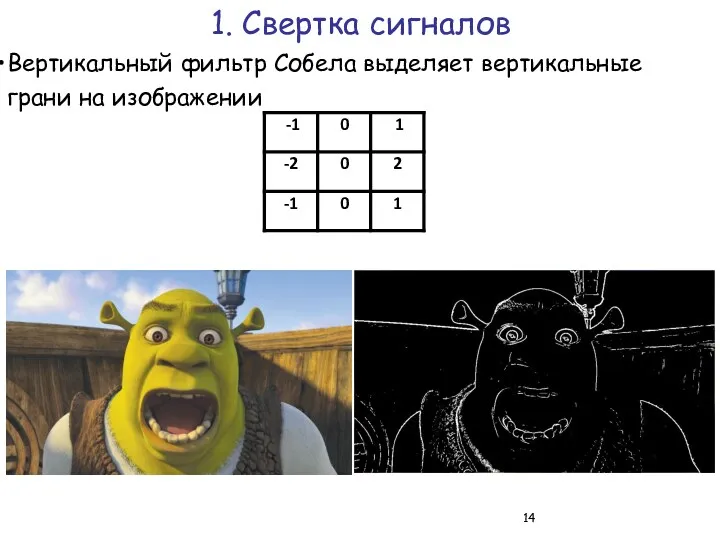
- 14. 1. Свертка сигналов Вертикальный фильтр Собела выделяет вертикальные грани на изображении
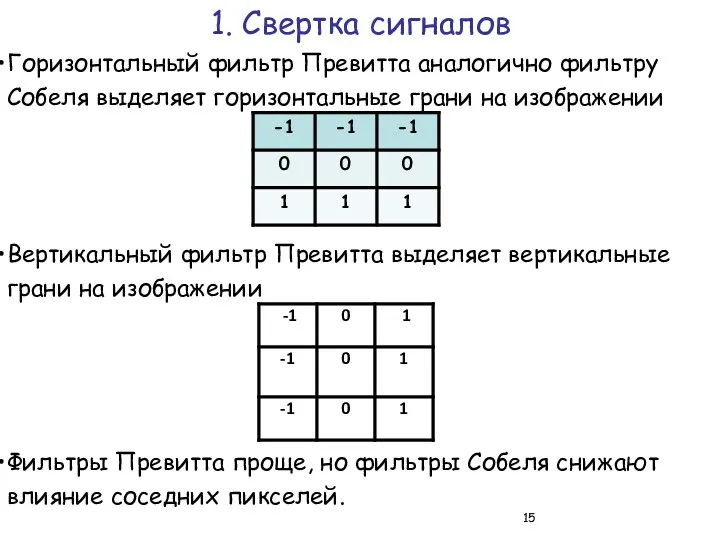
- 15. 1. Свертка сигналов Горизонтальный фильтр Превитта аналогично фильтру Собеля выделяет горизонтальные грани на изображении Вертикальный фильтр
- 16. 1. Свертка сигналов Если для каждого пикселя (i, j) применением вертикаль-ного фильтра вычислить соответствующее ему значение
- 17. Градиент и антиградиент на местности 1. Свертка сигналов
- 18. Если для каждого пикселя изображения построить гради-ент (это будет двуслойная матрица, один слой – горизонта-льная координата
- 19. Точки, в которых градиент близок к нулю, соответствуют на поверхности либо вершине, либо яме, либо математиче-ской
- 20. Построение границ методом Канни 1. Свертка сигналов
- 21. 1. Свертка сигналов
- 22. Фильтры Собеля и Превитта называются дифференцирующими, они, как и производная, дают нулевое значение на плоской поверхности.
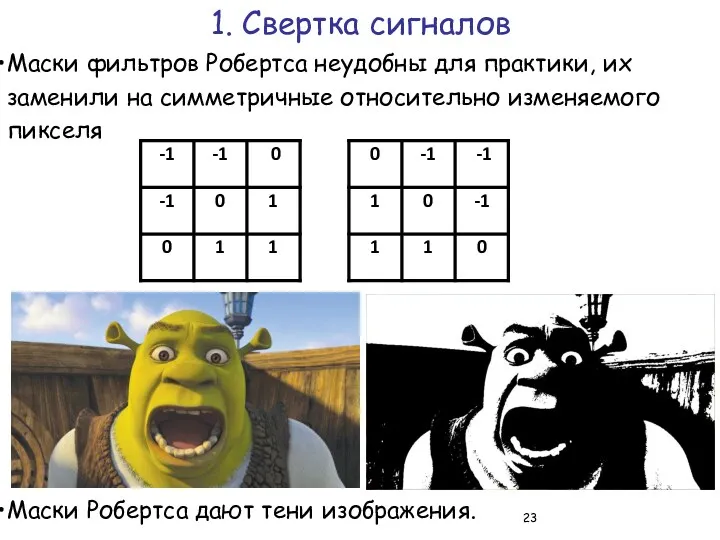
- 23. 1. Свертка сигналов Маски фильтров Робертса неудобны для практики, их заменили на симметричные относительно изменяемого пикселя
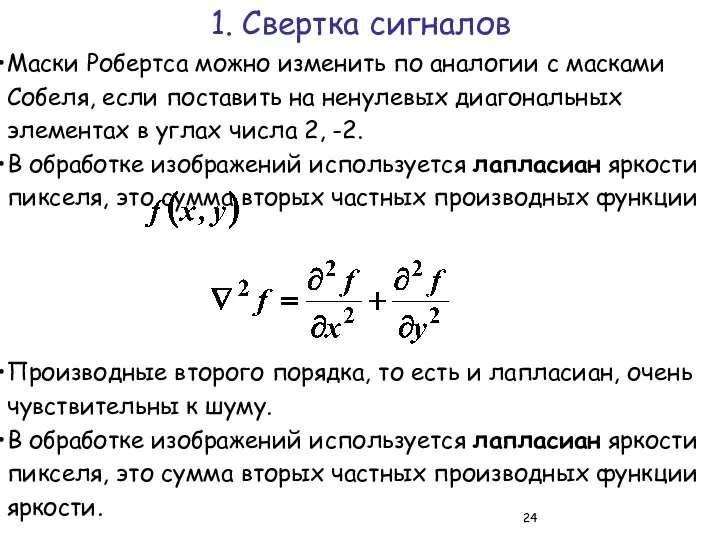
- 24. 1. Свертка сигналов Маски Робертса можно изменить по аналогии с масками Собеля, если поставить на ненулевых
- 25. Сегментация подразделяет изображение на составляющие его области или объекты. Та степень детализации, до которой доводится такое
- 26. В этом случае следует выбрать фильтры такого вида, которые будут усиливать сигнал от интересующих объектов и
- 27. Как правило, алгоритмы сегментации изображений основываются на одном из двух базовых свойств сигнала яркости: разрывности и
- 28. Производный 1-го и 2-го порядков для изображения с шумами. 1-я строка – шум небольшой, 2-я средний,
- 29. Перепады яркости с гладким переходом. Вторая произво-дная изменяет значение от положительного к отрицатель-ному 2. Сегментация изображений
- 30. Рисунки показывают, что в зашумленном изображении вторую производную трудно использовать для выделения границ. Но если предварительно
- 31. Лапласиан (сумма квадратов вторых частных производ-ных) реализуется одной из двух матриц 2. Сегментация изображений Лапласиан можно
- 32. Более точная маска лапласиана-гауссиана имеет вид 2. Сегментация изображений График непрерывной функции лапласиана-гауссиана имеет характерный вид
- 33. «Мексиканская шляпа» - лапласиан-гауссиан и его дискретизация 2. Сегментация изображений
- 34. Применение лапласиана-гауссиана 2. Сегментация изображений
- 35. Морфологические операции. В биологии словом морфо-логия называют область, которая изучает форму и строение животных и растений.
- 36. Пример операции дилатации. 2. Сегментация изображений
- 37. Дилатация применяется для удаления разрывов. Пример. Замыкание контура A. 2. Сегментация изображений В MatLab: D =
- 38. Эрозией множества А по примитиву В — это множество всех таких точек центра В при сдвиге
- 39. Эрозия выделяет внутренность объекта. Пример. Эрозия контура A. 2. Сегментация изображений
- 40. Пример. Удаление мелких деталей. Вначале применяем эрозию с примитивом, чуть меньшим, чем квадраты, которые нужно оставить
- 41. Последовательное грамотное применение операций дилатации и эрозии улучшает картинку. 2. Сегментация изображений
- 42. Пример. Построение границы объекта морфологичес-кими операциями эрозии и вычитания. 2. Сегментация изображений 1) Применение эрозии; 2)
- 43. Пример. Заполнение области морфологическими опера-циями. Исходное множество А состоит из граничных точек неко- торой области, граница
- 44. 1) Применение дилатации. Алгоритм начинает работу с точки X0 , применяем дилатации с ядром В с
- 45. 2) Наращиваем область применение дилатации. На каж-дом шаге берем пересечение результата с дополнением AC . X7
- 46. Морфологическими операциями можно строить выпук-лую оболочку фигуры или множества точек, утолщать и утоньшать границы области и
- 47. Преобразование Хафа. Рассмотрим решение задачи: на плоскости дано множество точек. Требуется провести прямые, на которых лежат
- 48. Если переписать это уравнение в виде —Ь = —xi а + уi и рассмотреть плоскость а
- 49. В пространстве H построена окружность. Точки на этой окружности соответствуют центрам тех окружностей в пространстве I,
- 50. Пороговая обработка. Для изображений, на которых объекты интереса и фон рисунка значительно отличаются по яркости, можно
- 51. Применение порогов для сложных изображений затруд-нительно и часто не дает результата. Даже введение дина-мических порогов, зависящих
- 52. Алгоритм наращивания областей (Region growing). Наращивание областей представляет собой процедуру, которая группирует пиксели или подобласти в
- 53. Правило близости и правило присоединения являются основными в алгоритме. Пусть приращение идет по одному пикселю и
- 55. Скачать презентацию
Обычно сигнал представляется функцией от времени, то есть аргументом является вещественная
Обычно сигнал представляется функцией от времени, то есть аргументом является вещественная
![Преобразование будем записывать в виде y(t) = F[x(t)], F переводит](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/347333/slide-2.jpg)
Преобразование будем записывать в виде
y(t) = F[x(t)],
F переводит функции x(t)
Преобразование будем записывать в виде
y(t) = F[x(t)],
F переводит функции x(t)
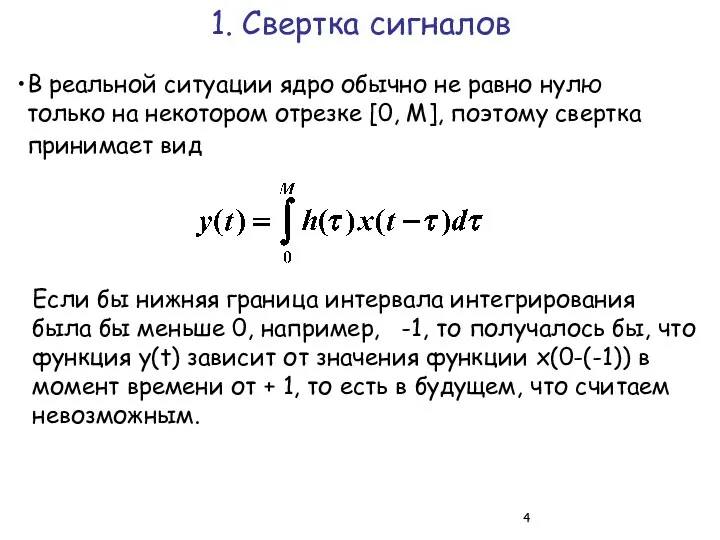
В реальной ситуации ядро обычно не равно нулю только на некотором
В реальной ситуации ядро обычно не равно нулю только на некотором
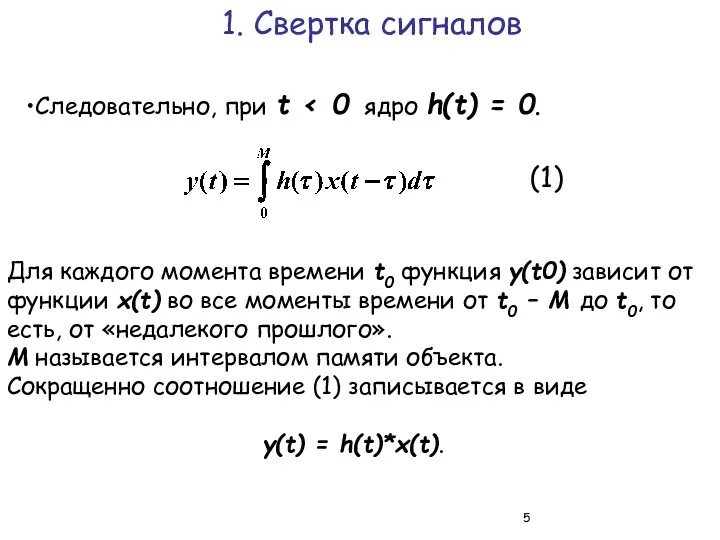
Следовательно, при t < 0 ядро h(t) = 0.
Для каждого момента
Следовательно, при t < 0 ядро h(t) = 0.
Для каждого момента
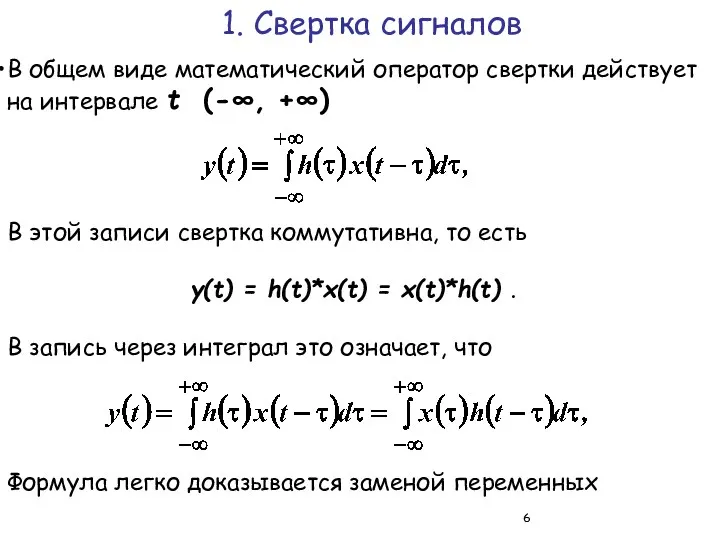
В общем виде математический оператор свертки действует на интервале t (-∞,
В общем виде математический оператор свертки действует на интервале t (-∞,
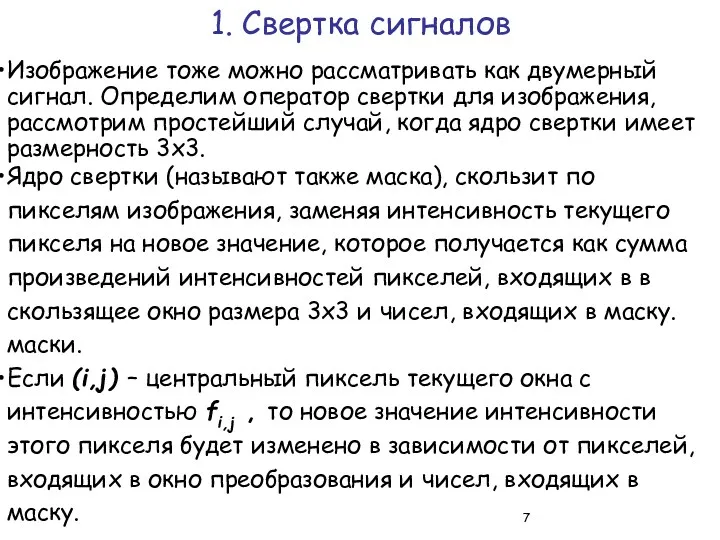
Изображение тоже можно рассматривать как двумерный сигнал. Определим оператор свертки для
Изображение тоже можно рассматривать как двумерный сигнал. Определим оператор свертки для
Если маска свертки равна
1. Свертка сигналов
то новое значение gi,j интенсивности пискеля
Если маска свертки равна
1. Свертка сигналов
то новое значение gi,j интенсивности пискеля
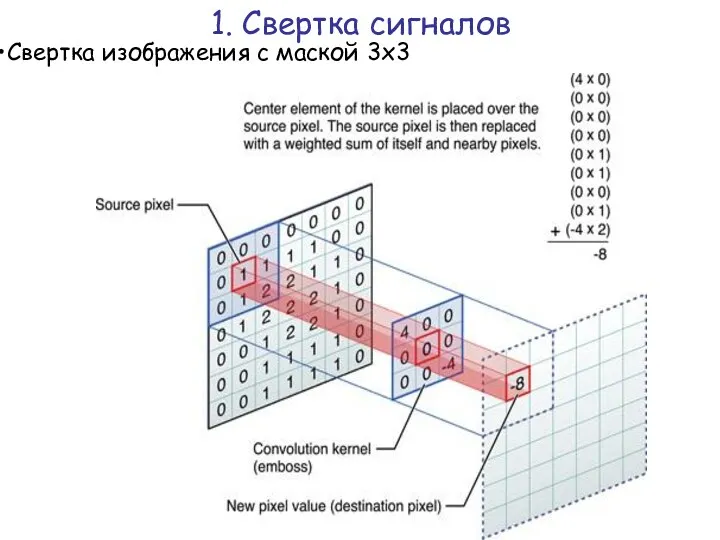
Свертка изображения с маской 3х3
1. Свертка сигналов
Свертка изображения с маской 3х3
1. Свертка сигналов
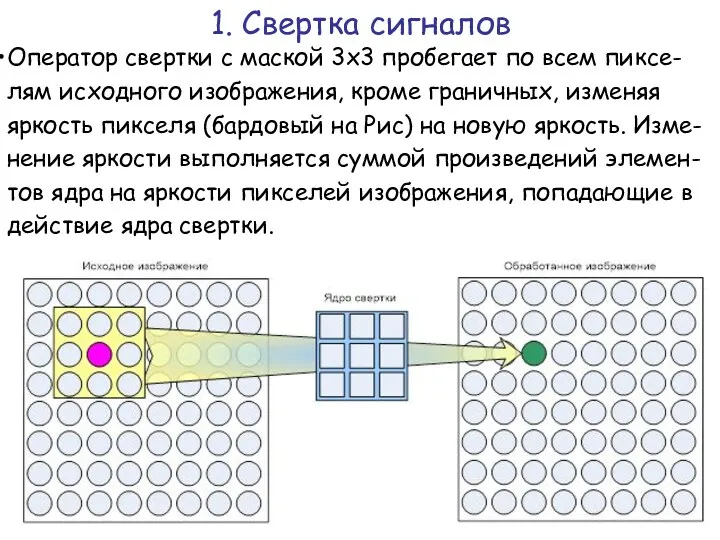
Оператор свертки с маской 3х3 пробегает по всем пиксе-лям исходного изображения,
Оператор свертки с маской 3х3 пробегает по всем пиксе-лям исходного изображения,
Оператор свертки с маской 3х3 пробегает по всем пиксе-лям исходного изображения,
Оператор свертки с маской 3х3 пробегает по всем пиксе-лям исходного изображения,
Если маской 3х3 имеет вид
1. Свертка сигналов
1/16
То фильтр сглаживает яркости, присваивая
Если маской 3х3 имеет вид
1. Свертка сигналов
1/16
То фильтр сглаживает яркости, присваивая

1. Свертка сигналов
Горизонтальный фильтр Собела выделяет горизонталь-ные грани на изображении
Например,
Исходное
1. Свертка сигналов
Горизонтальный фильтр Собела выделяет горизонталь-ные грани на изображении
Например,
Исходное
1. Свертка сигналов
Вертикальный фильтр Собела выделяет вертикальные грани на изображении
1. Свертка сигналов
Вертикальный фильтр Собела выделяет вертикальные грани на изображении
1. Свертка сигналов
Горизонтальный фильтр Превитта аналогично фильтру Собеля выделяет горизонтальные грани
1. Свертка сигналов
Горизонтальный фильтр Превитта аналогично фильтру Собеля выделяет горизонтальные грани
1. Свертка сигналов
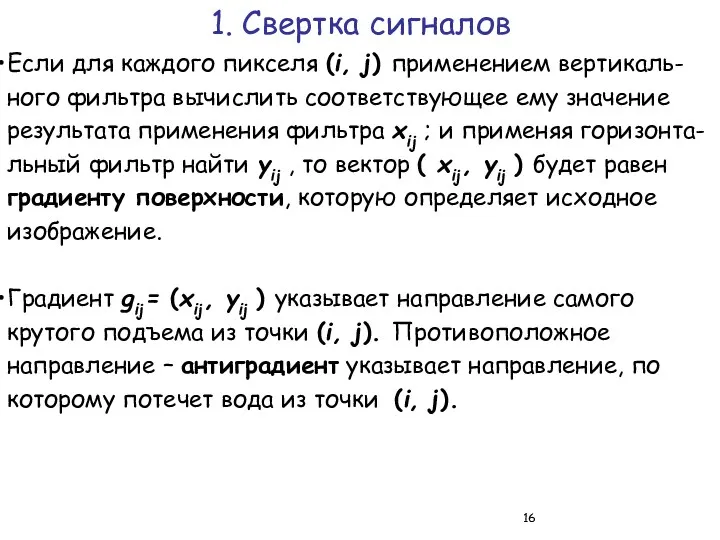
Если для каждого пикселя (i, j) применением вертикаль-ного фильтра
1. Свертка сигналов
Если для каждого пикселя (i, j) применением вертикаль-ного фильтра

Градиент и антиградиент на местности
1. Свертка сигналов
Градиент и антиградиент на местности
1. Свертка сигналов
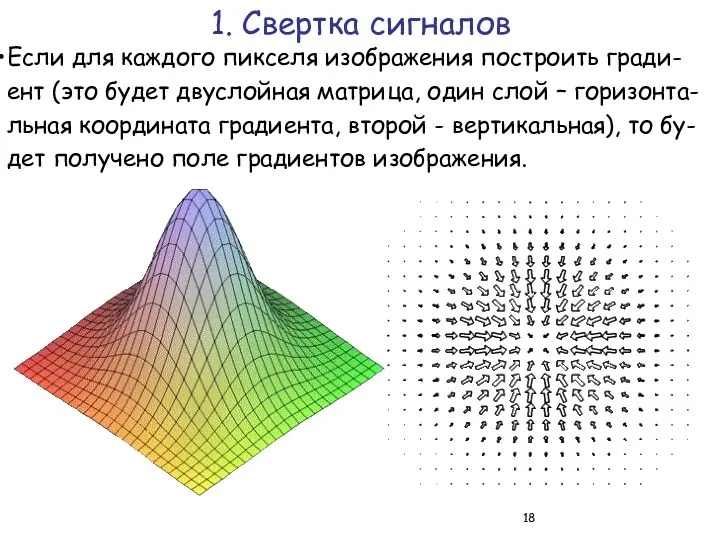
Если для каждого пикселя изображения построить гради-ент (это будет двуслойная матрица,
Если для каждого пикселя изображения построить гради-ент (это будет двуслойная матрица,
Точки, в которых градиент близок к нулю, соответствуют на поверхности либо
Точки, в которых градиент близок к нулю, соответствуют на поверхности либо

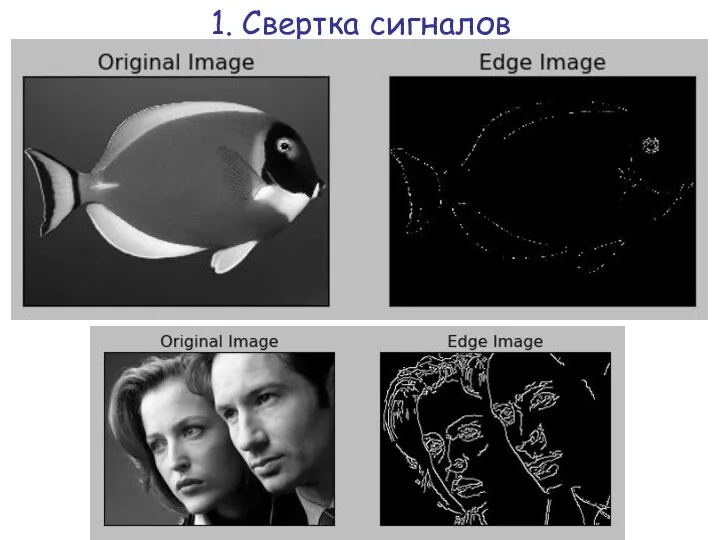
Построение границ методом Канни
1. Свертка сигналов
Построение границ методом Канни
1. Свертка сигналов
1. Свертка сигналов
1. Свертка сигналов
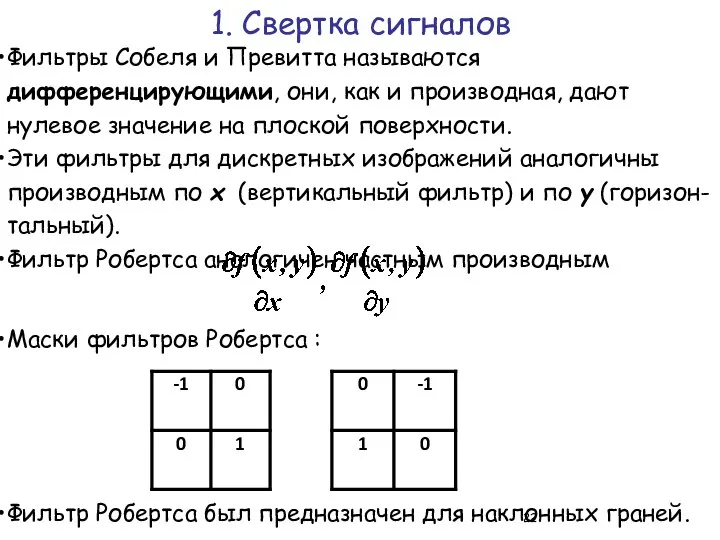
Фильтры Собеля и Превитта называются дифференцирующими, они, как и производная, дают
Фильтры Собеля и Превитта называются дифференцирующими, они, как и производная, дают
1. Свертка сигналов
Маски фильтров Робертса неудобны для практики, их заменили на
1. Свертка сигналов
Маски фильтров Робертса неудобны для практики, их заменили на
1. Свертка сигналов
Маски Робертса можно изменить по аналогии с масками Собеля,
1. Свертка сигналов
Маски Робертса можно изменить по аналогии с масками Собеля,
Сегментация подразделяет изображение на составляющие его области или объекты. Та степень
Сегментация подразделяет изображение на составляющие его области или объекты. Та степень
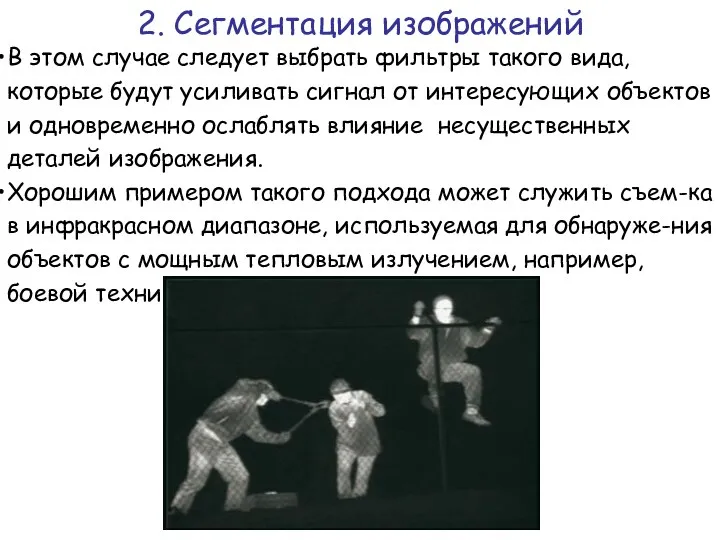
В этом случае следует выбрать фильтры такого вида, которые будут усиливать
В этом случае следует выбрать фильтры такого вида, которые будут усиливать
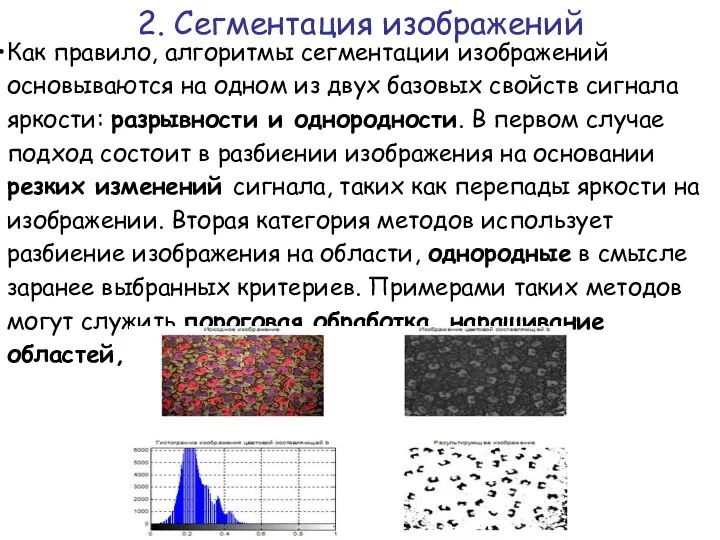
Как правило, алгоритмы сегментации изображений основываются на одном из двух базовых
Как правило, алгоритмы сегментации изображений основываются на одном из двух базовых
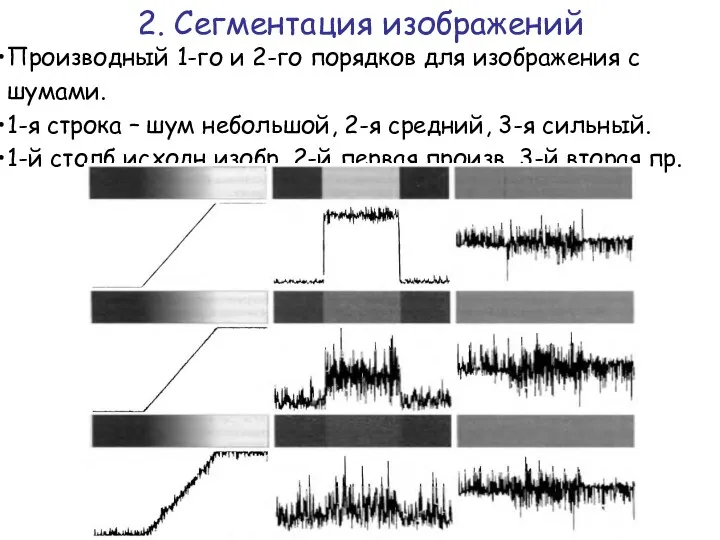
Производный 1-го и 2-го порядков для изображения с шумами.
1-я строка
Производный 1-го и 2-го порядков для изображения с шумами.
1-я строка

Перепады яркости с гладким переходом. Вторая произво-дная изменяет значение от положительного
Перепады яркости с гладким переходом. Вторая произво-дная изменяет значение от положительного
Рисунки показывают, что в зашумленном изображении вторую производную трудно использовать для
Рисунки показывают, что в зашумленном изображении вторую производную трудно использовать для
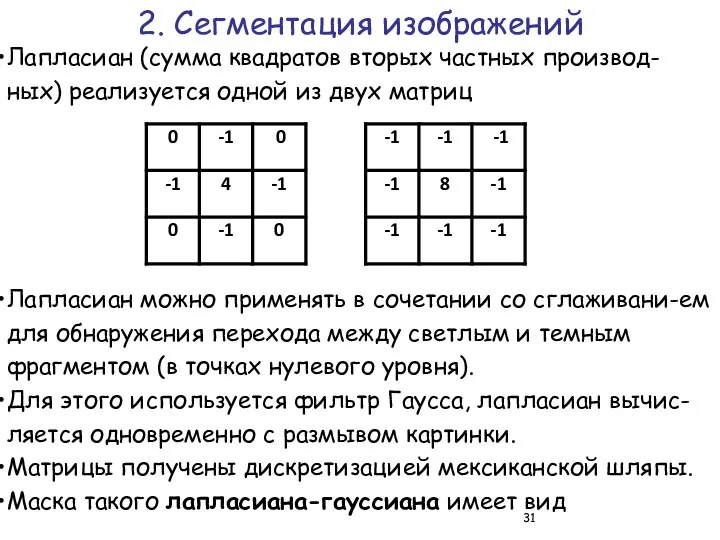
Лапласиан (сумма квадратов вторых частных производ-ных) реализуется одной из двух матриц
2.
Лапласиан (сумма квадратов вторых частных производ-ных) реализуется одной из двух матриц
2.
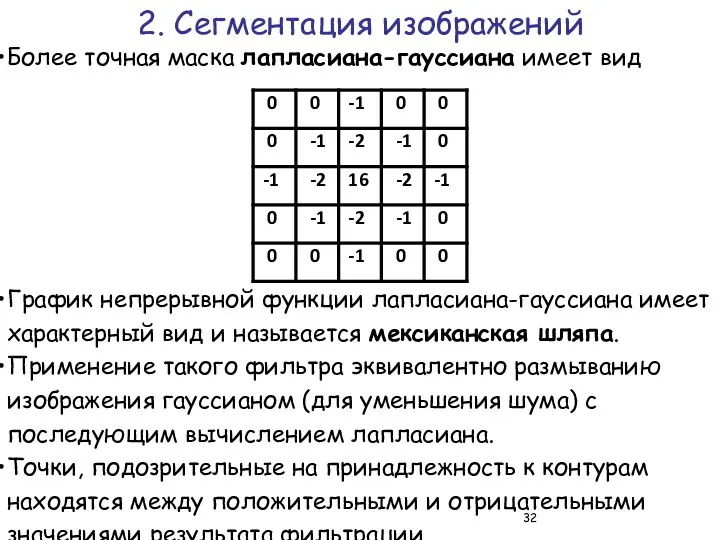
Более точная маска лапласиана-гауссиана имеет вид
2. Сегментация изображений
График непрерывной функции лапласиана-гауссиана
Более точная маска лапласиана-гауссиана имеет вид
2. Сегментация изображений
График непрерывной функции лапласиана-гауссиана

«Мексиканская шляпа» - лапласиан-гауссиан и его дискретизация
2. Сегментация изображений
«Мексиканская шляпа» - лапласиан-гауссиан и его дискретизация
2. Сегментация изображений
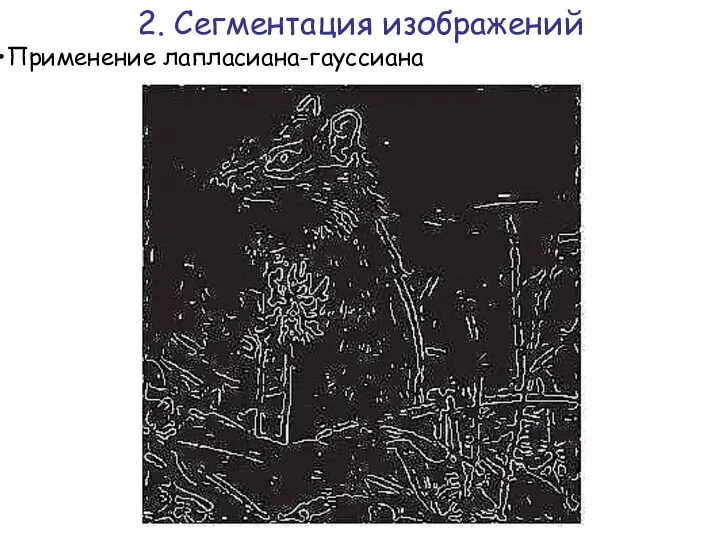
Применение лапласиана-гауссиана
2. Сегментация изображений
Применение лапласиана-гауссиана
2. Сегментация изображений
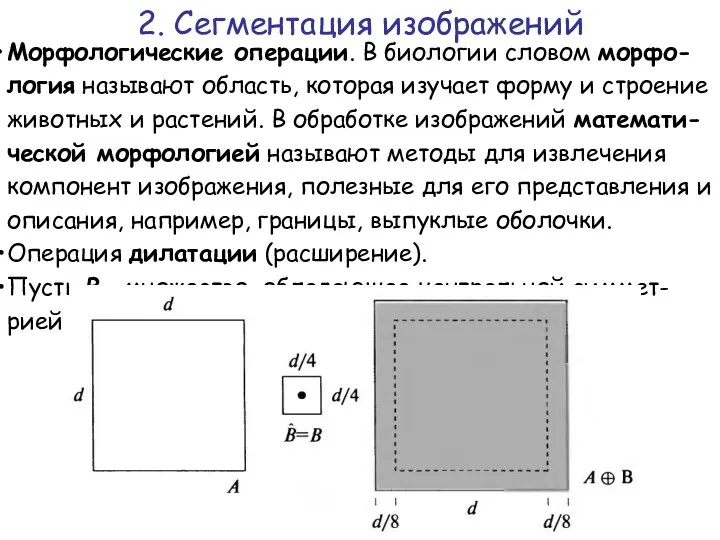
Морфологические операции. В биологии словом морфо-логия называют область, которая изучает форму
Морфологические операции. В биологии словом морфо-логия называют область, которая изучает форму
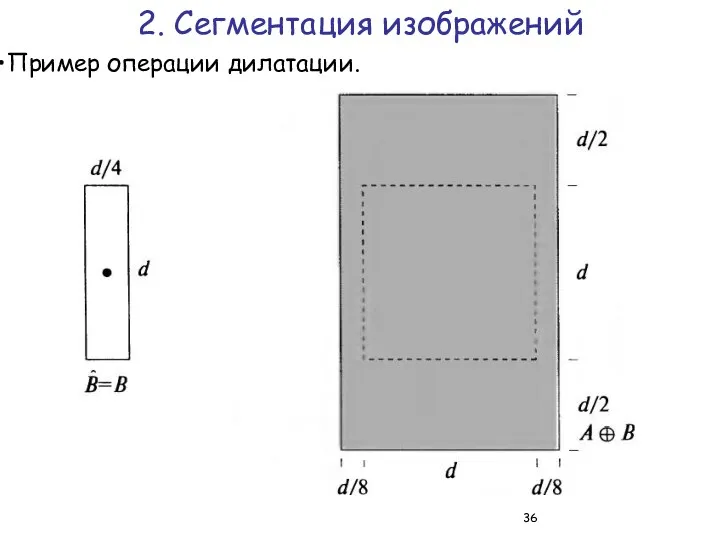
Пример операции дилатации.
2. Сегментация изображений
Пример операции дилатации.
2. Сегментация изображений
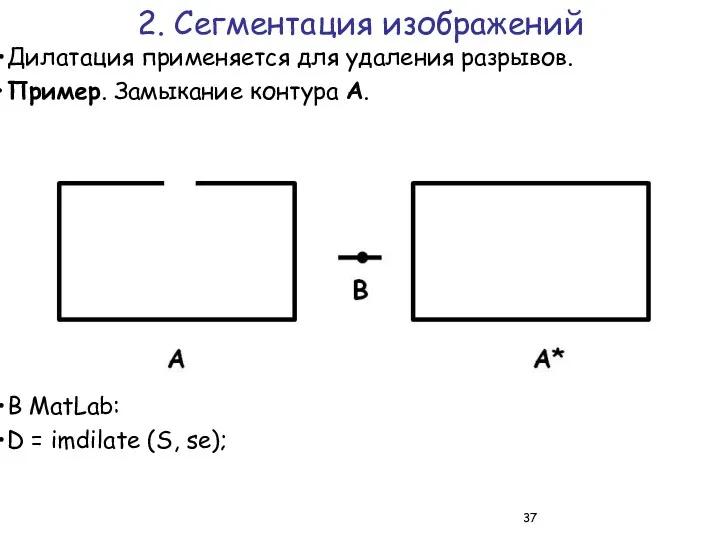
Дилатация применяется для удаления разрывов.
Пример. Замыкание контура A.
2. Сегментация изображений
В MatLab:
Дилатация применяется для удаления разрывов.
Пример. Замыкание контура A.
2. Сегментация изображений
В MatLab:
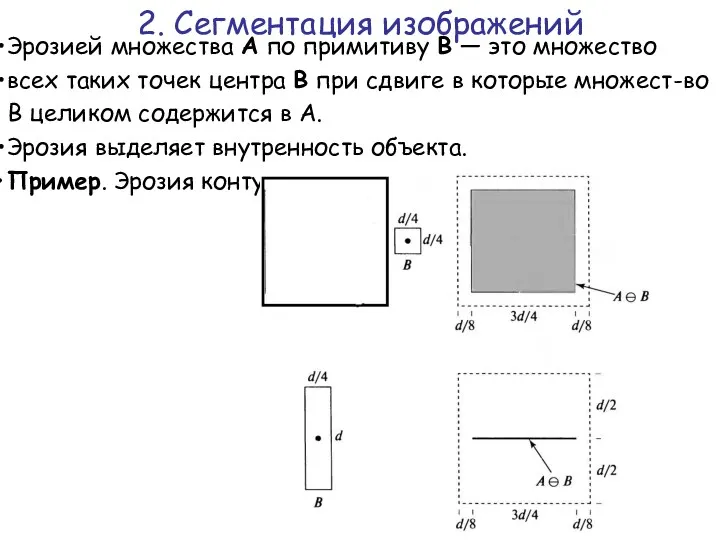
Эрозией множества А по примитиву В — это множество
всех таких
Эрозией множества А по примитиву В — это множество
всех таких
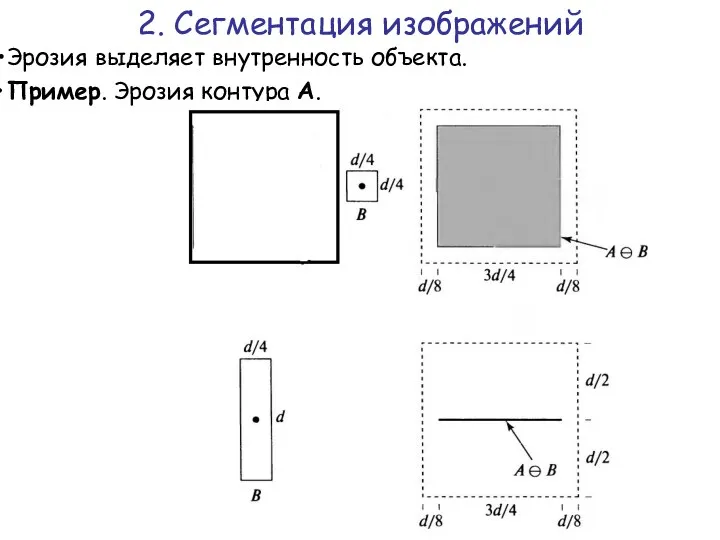
Эрозия выделяет внутренность объекта.
Пример. Эрозия контура A.
2. Сегментация изображений
Эрозия выделяет внутренность объекта.
Пример. Эрозия контура A.
2. Сегментация изображений
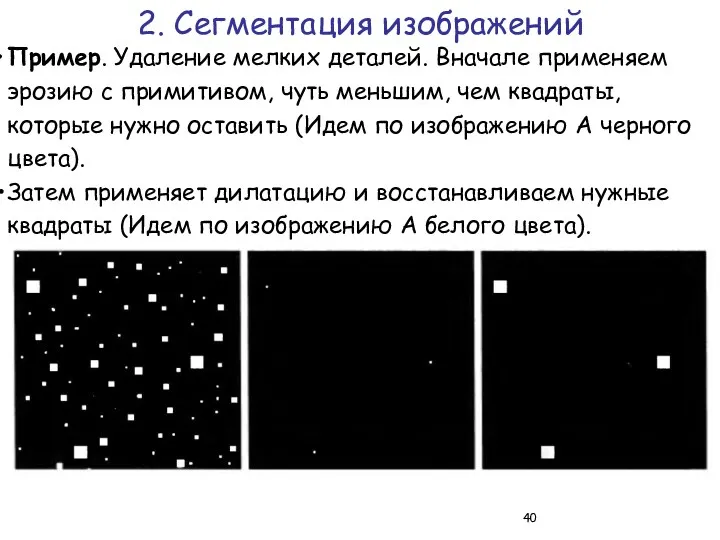
Пример. Удаление мелких деталей. Вначале применяем эрозию с примитивом, чуть меньшим,
Пример. Удаление мелких деталей. Вначале применяем эрозию с примитивом, чуть меньшим,
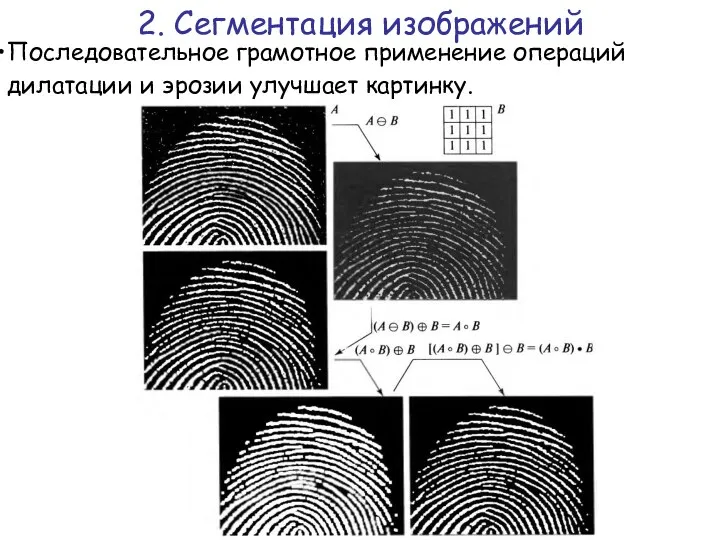
Последовательное грамотное применение операций дилатации и эрозии улучшает картинку.
2. Сегментация изображений
Последовательное грамотное применение операций дилатации и эрозии улучшает картинку.
2. Сегментация изображений
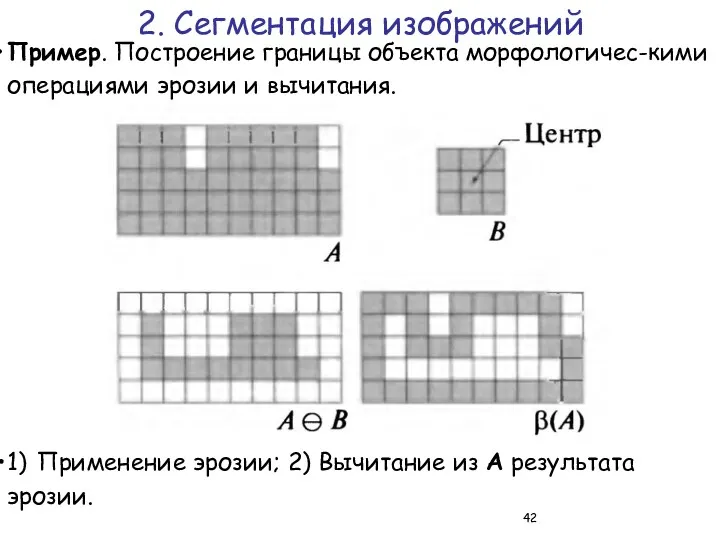
Пример. Построение границы объекта морфологичес-кими операциями эрозии и вычитания.
2. Сегментация изображений
1)
Пример. Построение границы объекта морфологичес-кими операциями эрозии и вычитания.
2. Сегментация изображений
1)
Пример. Заполнение области морфологическими опера-циями.
Исходное множество А состоит из граничных точек
Пример. Заполнение области морфологическими опера-циями.
Исходное множество А состоит из граничных точек

1) Применение дилатации. Алгоритм начинает работу с точки X0 , применяем
1) Применение дилатации. Алгоритм начинает работу с точки X0 , применяем
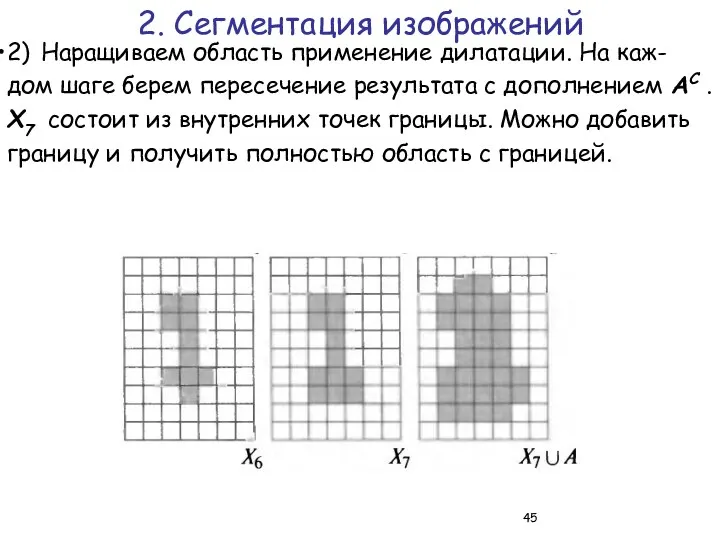
2) Наращиваем область применение дилатации. На каж-дом шаге берем пересечение результата
2) Наращиваем область применение дилатации. На каж-дом шаге берем пересечение результата
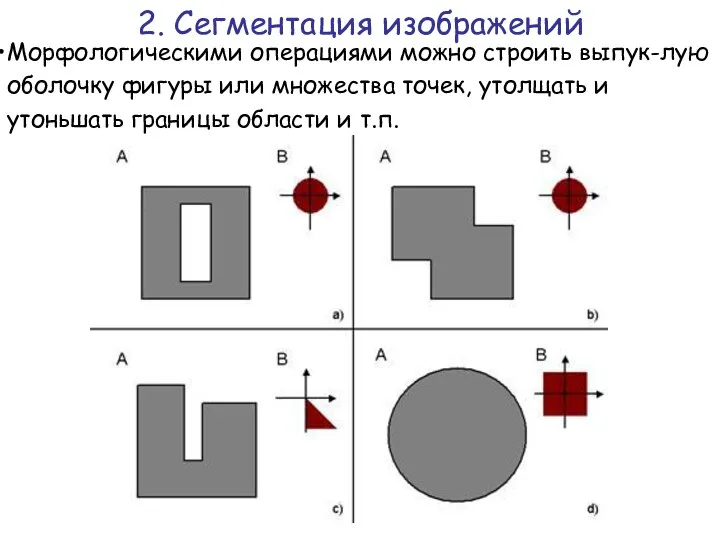
Морфологическими операциями можно строить выпук-лую оболочку фигуры или множества точек, утолщать
Морфологическими операциями можно строить выпук-лую оболочку фигуры или множества точек, утолщать
Преобразование Хафа.
Рассмотрим решение задачи: на плоскости дано множество точек. Требуется
Преобразование Хафа.
Рассмотрим решение задачи: на плоскости дано множество точек. Требуется
Если переписать это уравнение в виде
—Ь = —xi а +
Если переписать это уравнение в виде
—Ь = —xi а +
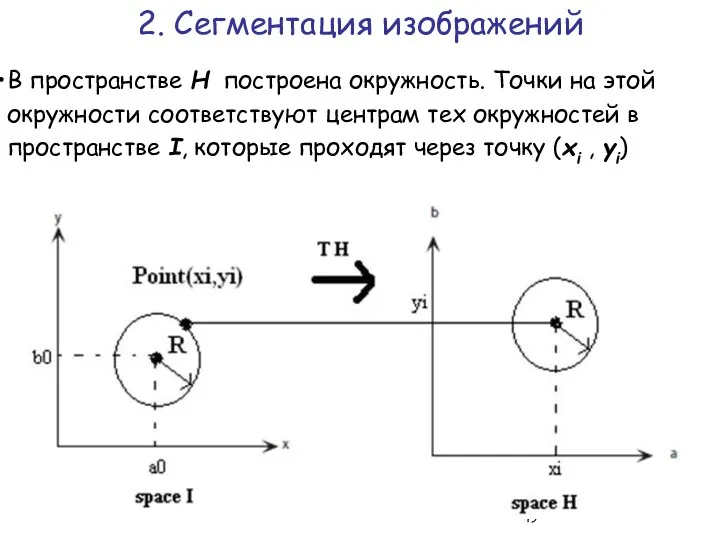
В пространстве H построена окружность. Точки на этой окружности соответствуют центрам
В пространстве H построена окружность. Точки на этой окружности соответствуют центрам
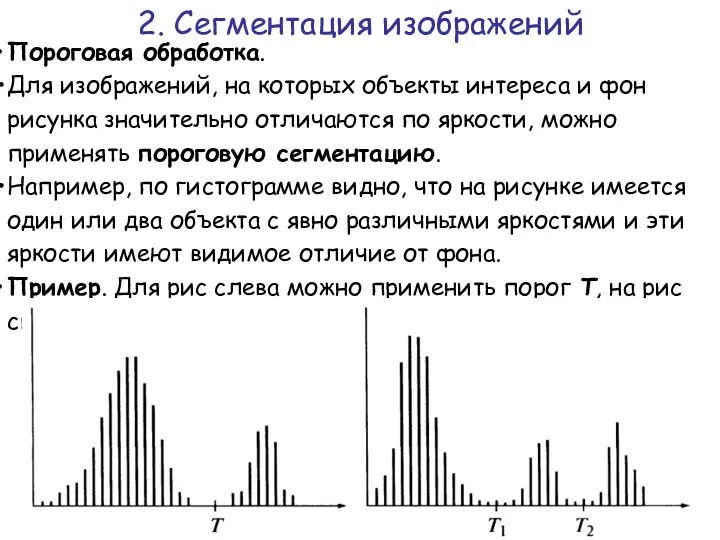
Пороговая обработка.
Для изображений, на которых объекты интереса и фон рисунка
Пороговая обработка.
Для изображений, на которых объекты интереса и фон рисунка
Применение порогов для сложных изображений затруд-нительно и часто не дает результата.
Применение порогов для сложных изображений затруд-нительно и часто не дает результата.
Алгоритм наращивания областей (Region growing).
Наращивание областей представляет собой процедуру, которая группирует
Алгоритм наращивания областей (Region growing).
Наращивание областей представляет собой процедуру, которая группирует
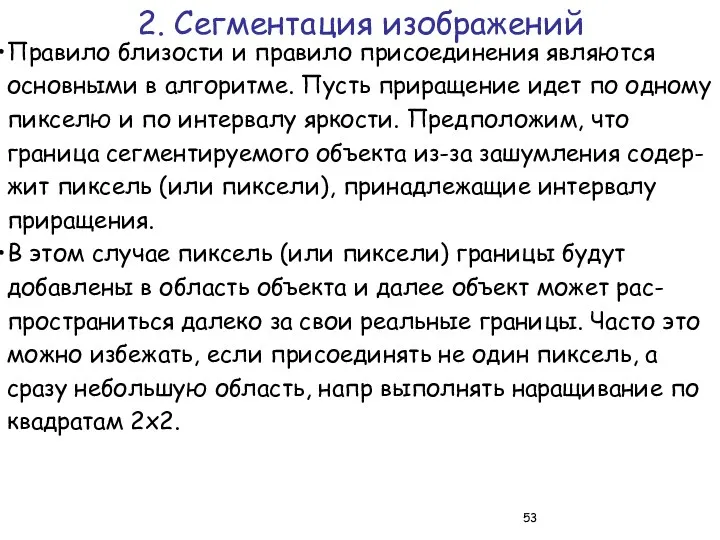
Правило близости и правило присоединения являются основными в алгоритме. Пусть приращение
Правило близости и правило присоединения являются основными в алгоритме. Пусть приращение
 Итоговое повторение курса геометрии 8 класса
Итоговое повторение курса геометрии 8 класса Синус, косинус, тангенс острого угла прямоугольного треугольника
Синус, косинус, тангенс острого угла прямоугольного треугольника Повторные испытания. Cxeмa Бернулли
Повторные испытания. Cxeмa Бернулли Расположение предметов (1 класс)
Расположение предметов (1 класс) Неравенства.
Неравенства. Основные формулы метода координат в пространстве. Урок №1. 11 класс
Основные формулы метода координат в пространстве. Урок №1. 11 класс Эконометрика и эконометрическое моделирование: основные понятия и определения
Эконометрика и эконометрическое моделирование: основные понятия и определения Конспект НОД по формированию элементарных математических представлений в средней группе по мотивам сказки Теремок
Конспект НОД по формированию элементарных математических представлений в средней группе по мотивам сказки Теремок Numeration. Why do we count additive?
Numeration. Why do we count additive? Подготовка к ГИА по математике. Задания 9
Подготовка к ГИА по математике. Задания 9 Умножение и деление натуральных чисел. 5 класс
Умножение и деление натуральных чисел. 5 класс Площадь трапеции
Площадь трапеции Графическое решение уравнений и неравенств
Графическое решение уравнений и неравенств Приёмы письменного деления на однозначное число
Приёмы письменного деления на однозначное число Геометрический смысл производной
Геометрический смысл производной Основные тригонометрические формулы
Основные тригонометрические формулы Что такое величина?
Что такое величина? Тренажёр по математике 1 класс
Тренажёр по математике 1 класс Счет в пределах 10, 1 класс Зимние забавы
Счет в пределах 10, 1 класс Зимние забавы 3 класс. Интерактивный тест Сравнение величин, М.И.Моро
3 класс. Интерактивный тест Сравнение величин, М.И.Моро Компьютерные технологии анализа данных и исследования статистических закономерностей
Компьютерные технологии анализа данных и исследования статистических закономерностей Способы отбора выборки
Способы отбора выборки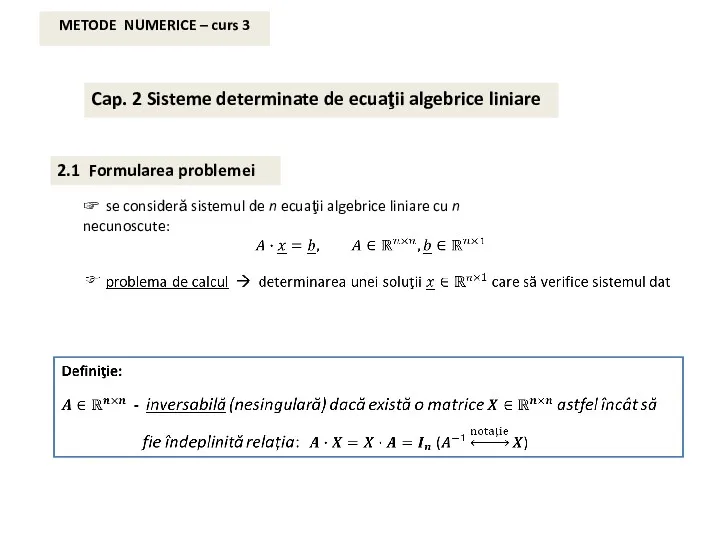 Metode numerice (curs 3)
Metode numerice (curs 3) Вписанная и описанная окружности. Часть 1. 8 класс
Вписанная и описанная окружности. Часть 1. 8 класс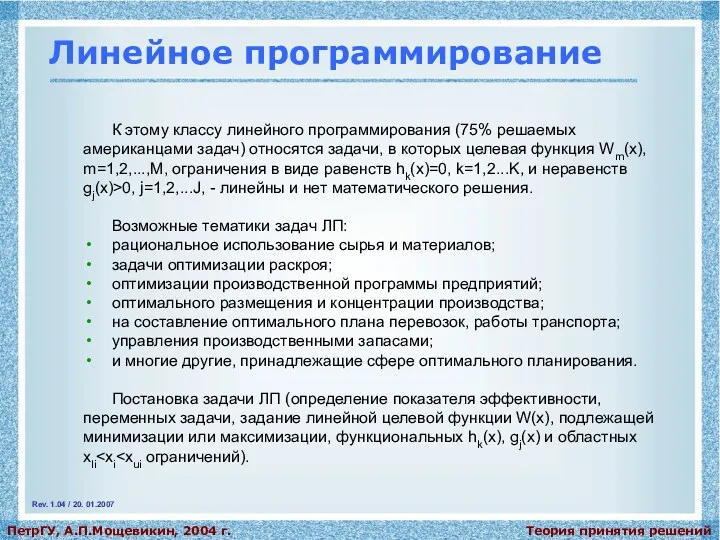 Линейное программирование
Линейное программирование Признаки равенства прямоугольных треугольников
Признаки равенства прямоугольных треугольников Презентация к уроку математики 2 кл
Презентация к уроку математики 2 кл Презентация к педагогическому проекут по ФЭМП для детей старшего дошкольного возраста В стране умных игр
Презентация к педагогическому проекут по ФЭМП для детей старшего дошкольного возраста В стране умных игр