Определение направляющих косинусов. Связь координат соответственных точек местности и снимка презентация
- Определение направляющих косинусов. Связь координат соответственных точек местности и снимка

Содержание
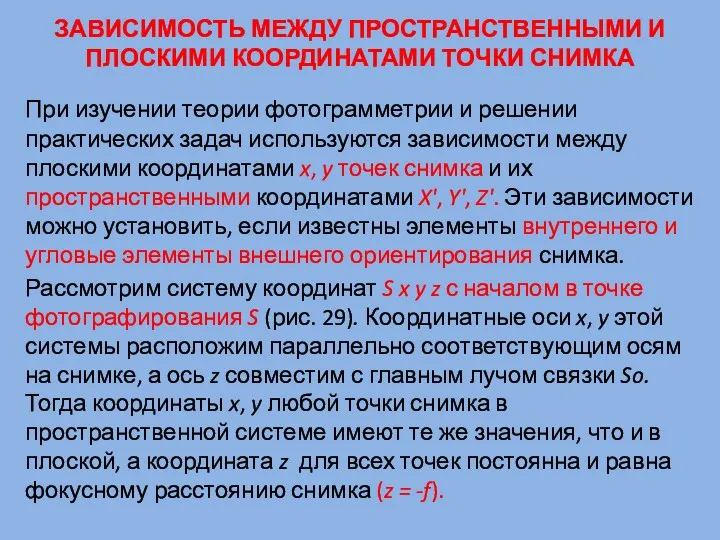
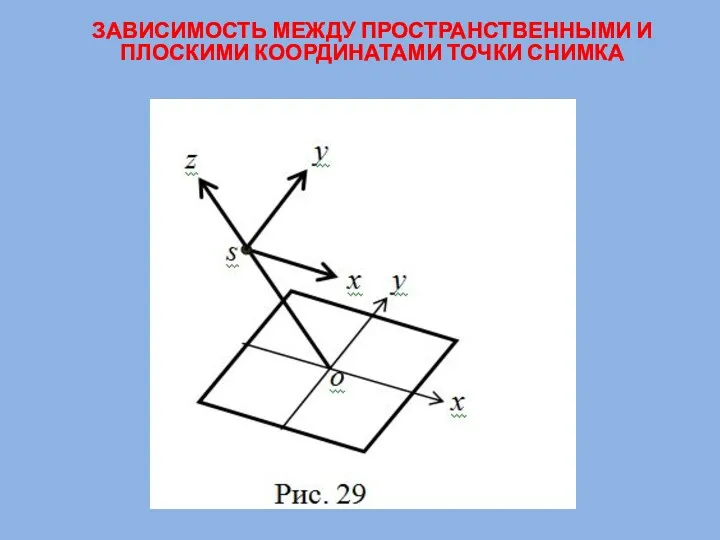
- 2. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА При изучении теории фотограмметрии и решении практических задач
- 3. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
- 4. Системы S X' Y' Z' и S x y z имеют общее начало, поэтому в процессе
- 5. Причем, каждый из направляющих косинусов это косину угла между соответствующими осями систем координат участвующих в преобразовании,
- 6. В приведенной выше формуле 16 не произведения координат, заключенных в скобках, а обозначение осей, между которыми
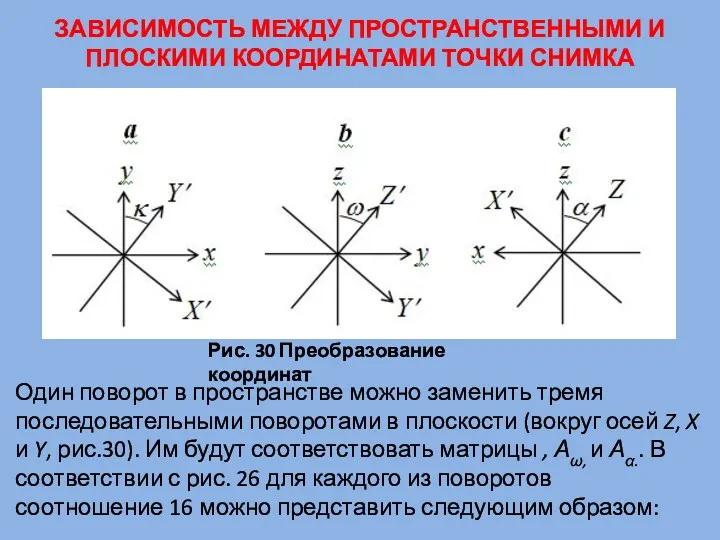
- 7. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА Один поворот в пространстве можно заменить тремя последовательными
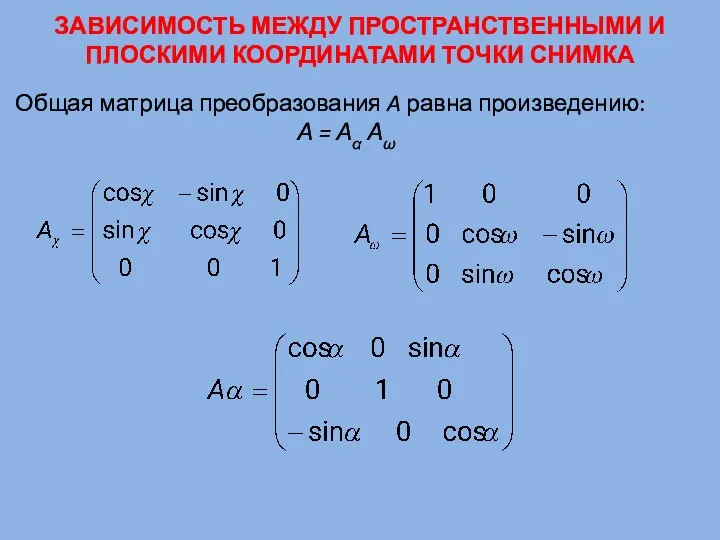
- 8. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА Общая матрица преобразования A равна произведению: А =
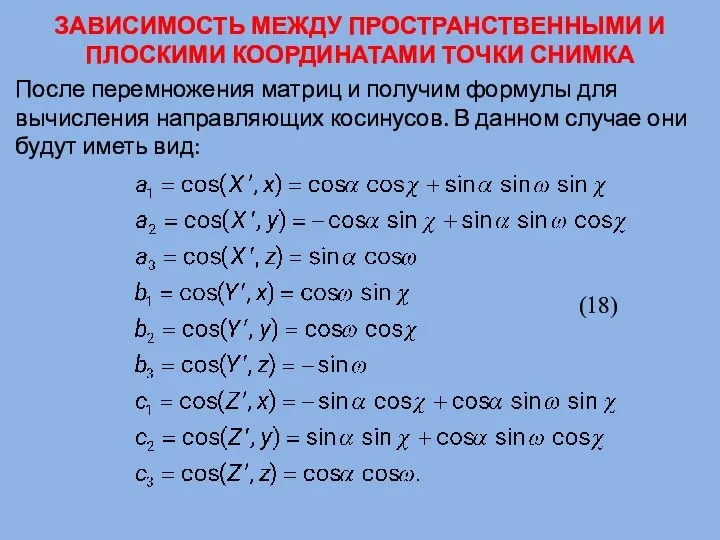
- 9. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА После перемножения матриц и получим формулы для вычисления
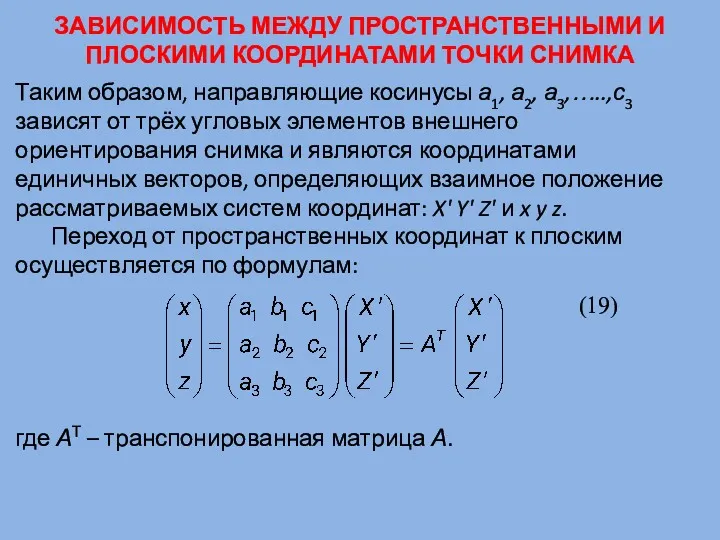
- 10. ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА Таким образом, направляющие косинусы а1, а2, а3,…..,с3 зависят
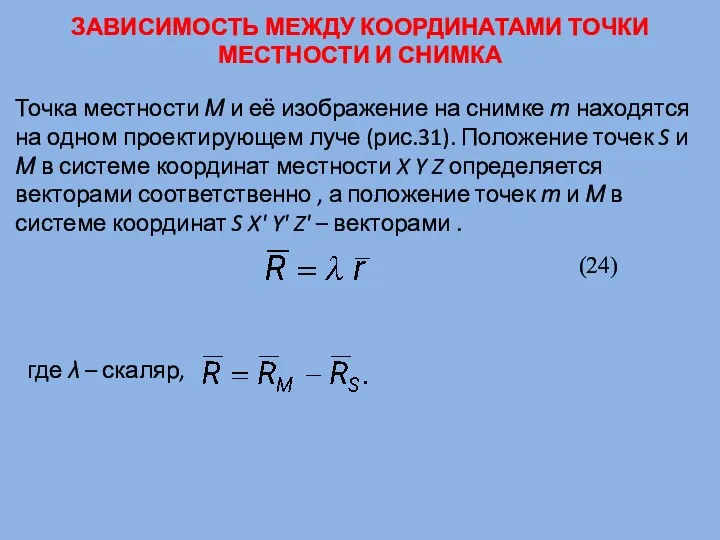
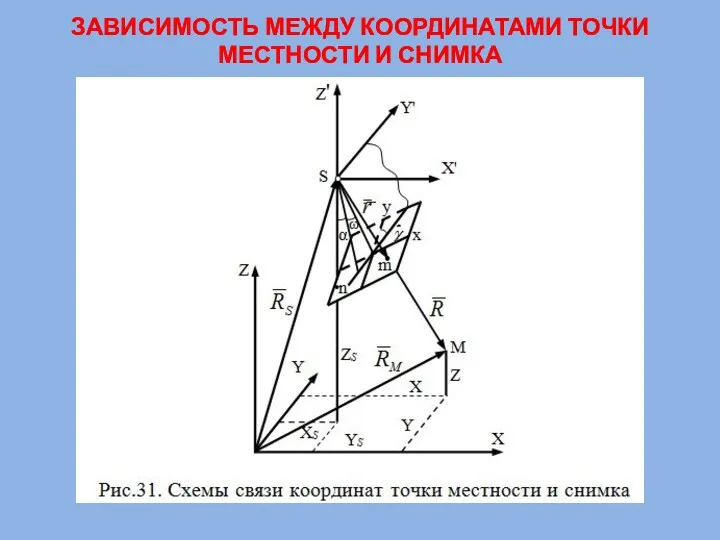
- 11. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА Точка местности М и её изображение на снимке т
- 12. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
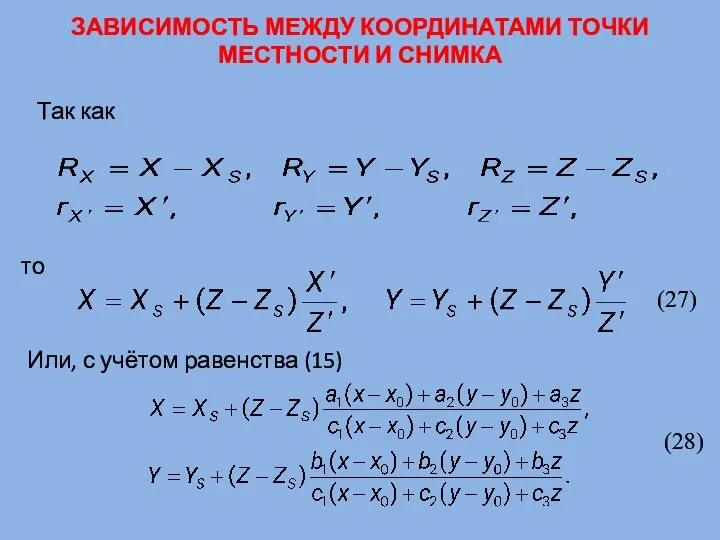
- 13. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА Так как то Или, с учётом равенства (15)
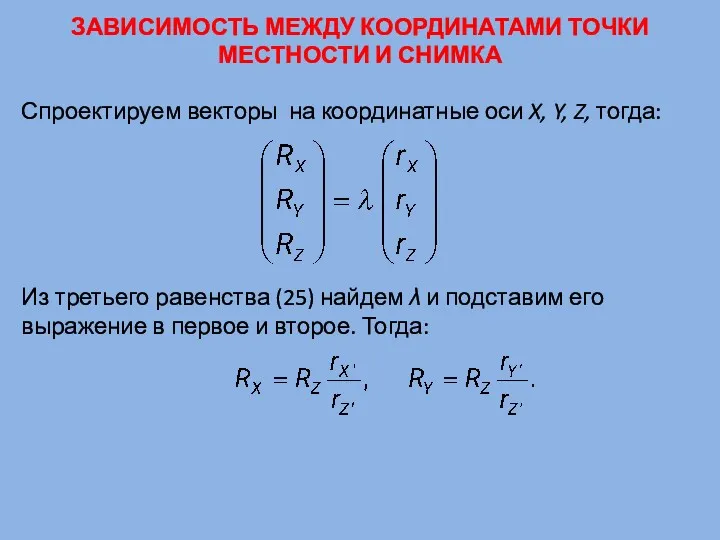
- 14. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА Спроектируем векторы на координатные оси X, Y, Z, тогда:
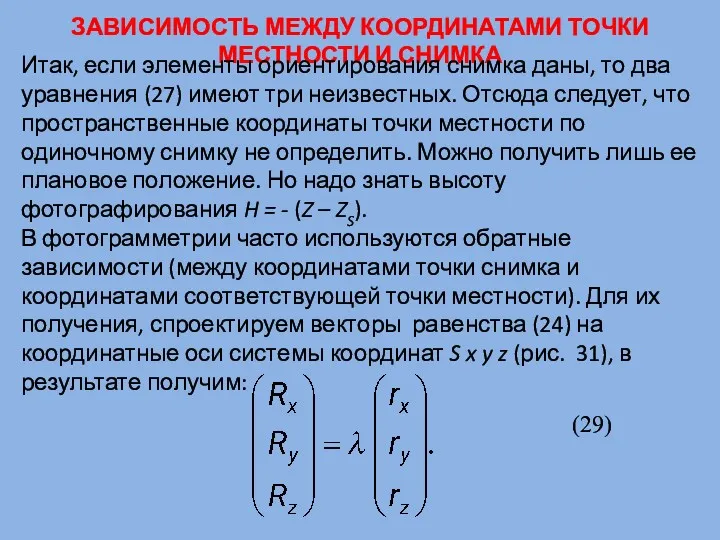
- 15. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА Итак, если элементы ориентирования снимка даны, то два уравнения
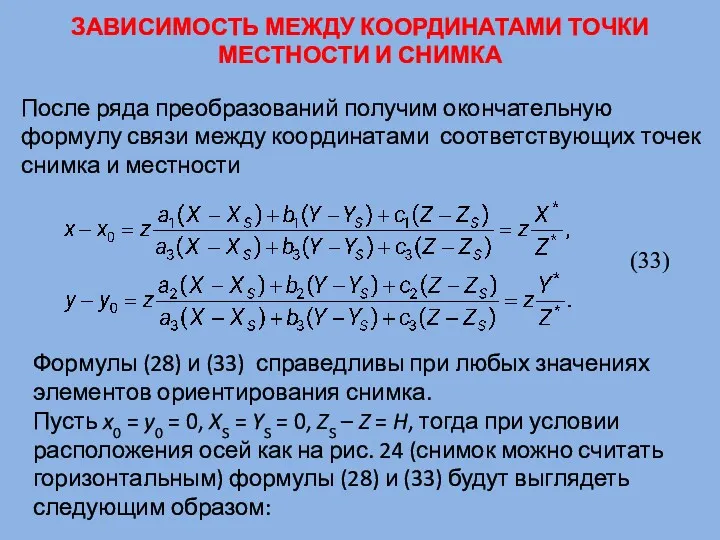
- 16. ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА После ряда преобразований получим окончательную формулу связи между координатами
- 18. Скачать презентацию
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
При изучении теории фотограмметрии
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
При изучении теории фотограмметрии
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
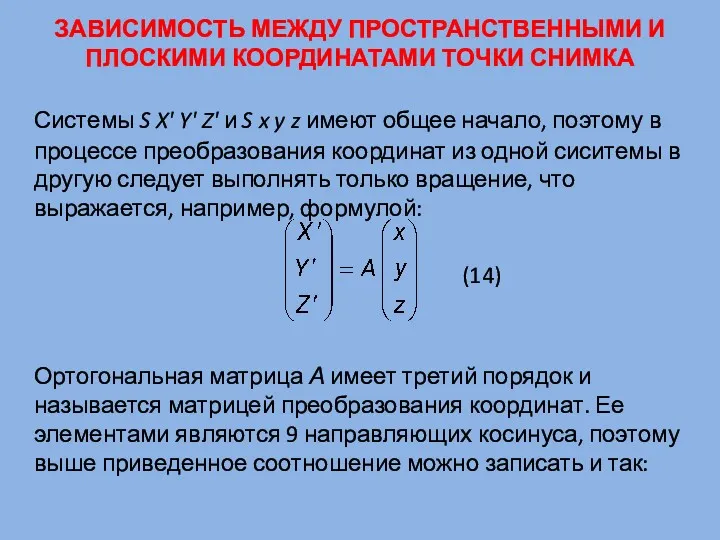
Системы S X' Y' Z' и S x y z имеют общее начало, поэтому в процессе преобразования
Системы S X' Y' Z' и S x y z имеют общее начало, поэтому в процессе преобразования
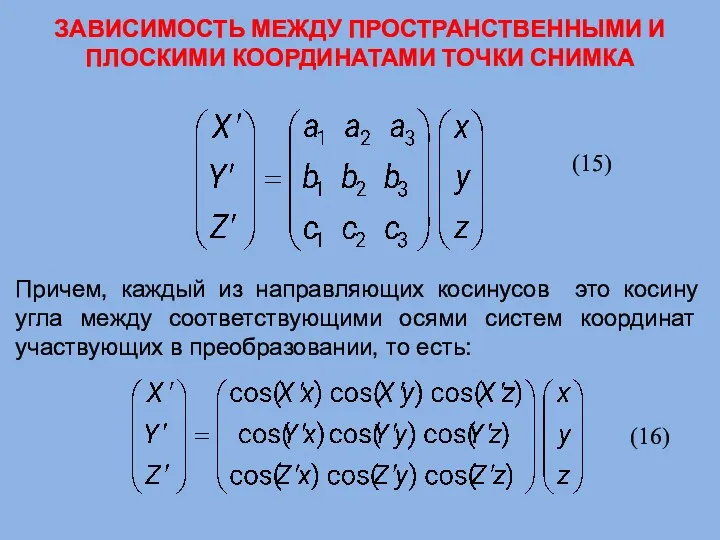
Причем, каждый из направляющих косинусов это косину угла между соответствующими осями
Причем, каждый из направляющих косинусов это косину угла между соответствующими осями
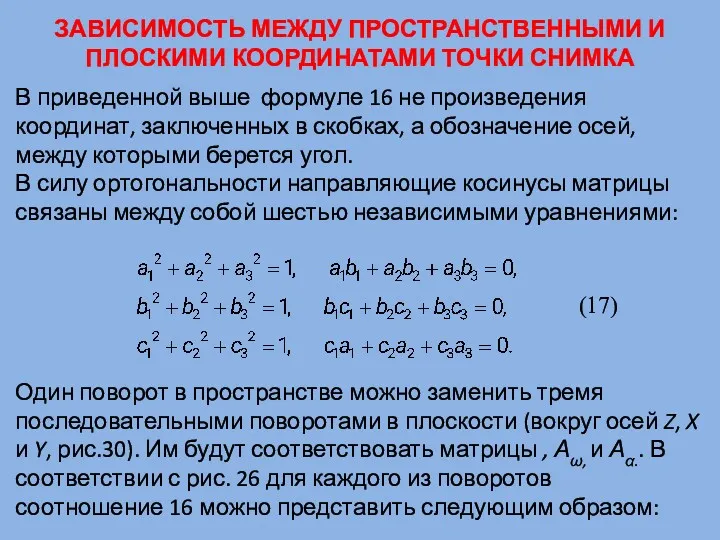
В приведенной выше формуле 16 не произведения координат, заключенных в скобках,
В приведенной выше формуле 16 не произведения координат, заключенных в скобках,
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
Один поворот в пространстве
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
Один поворот в пространстве
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
Общая матрица преобразования A
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
Общая матрица преобразования A
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
После перемножения матриц и
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
После перемножения матриц и
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
Таким образом, направляющие косинусы
ЗАВИСИМОСТЬ МЕЖДУ ПРОСТРАНСТВЕННЫМИ И ПЛОСКИМИ КООРДИНАТАМИ ТОЧКИ СНИМКА
Таким образом, направляющие косинусы
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Точка местности М и её
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Точка местности М и её
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Так как
то
Или, с учётом
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Так как
то
Или, с учётом
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Спроектируем векторы на координатные оси
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Спроектируем векторы на координатные оси
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Итак, если элементы ориентирования снимка
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
Итак, если элементы ориентирования снимка
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
После ряда преобразований получим окончательную
ЗАВИСИМОСТЬ МЕЖДУ КООРДИНАТАМИ ТОЧКИ МЕСТНОСТИ И СНИМКА
После ряда преобразований получим окончательную
 Симметрия в кубе, параллелепипеде, в призме, в пирамиде
Симметрия в кубе, параллелепипеде, в призме, в пирамиде Увеличение и уменьшение числа в несколько раз
Увеличение и уменьшение числа в несколько раз Задачи по планиметрии на ЕГЭ
Задачи по планиметрии на ЕГЭ Регрессионные модели с переменной структурой (фиктивные переменные)
Регрессионные модели с переменной структурой (фиктивные переменные) Классическое определение вероятности
Классическое определение вероятности История развития учения об уравнениях
История развития учения об уравнениях Чертежи и развертки простых геометрических тел
Чертежи и развертки простых геометрических тел Компланарные векторы
Компланарные векторы Числа от 1 до 10
Числа от 1 до 10 Математический кроссворд
Математический кроссворд Задачи на взвешивания на весах с гирями и без гирь
Задачи на взвешивания на весах с гирями и без гирь Памятка по оформлению краткой записи к задачам 1 класса
Памятка по оформлению краткой записи к задачам 1 класса Задачи на проценты
Задачи на проценты Центральные и вписанные углы
Центральные и вписанные углы Многочлен и его стандартный вид
Многочлен и его стандартный вид Цифровой образовательный ресурс по познавательному направлению развития ребенка
Цифровой образовательный ресурс по познавательному направлению развития ребенка Умножение на двузначное число
Умножение на двузначное число 20231120_00273c-2130_2_0
20231120_00273c-2130_2_0 Делители и кратные
Делители и кратные Неравенства второй степени с одной переменной
Неравенства второй степени с одной переменной Третий признак равенства треугольников
Третий признак равенства треугольников Системы массового обслуживания (СМО)
Системы массового обслуживания (СМО) Turing machine
Turing machine Геометрические преобразования
Геометрические преобразования Методы решения тригонометрических уравнений
Методы решения тригонометрических уравнений Формула суммы n первых членов геометрической прогрессии
Формула суммы n первых членов геометрической прогрессии Случайные процессы (лекция 15). Параметрические модели временных рядов. Сглаживание и фильтрация
Случайные процессы (лекция 15). Параметрические модели временных рядов. Сглаживание и фильтрация Умножение и деление десятичных дробей
Умножение и деление десятичных дробей