- Показатели качества автоматических систем регулирования. Лекция 25

Содержание
- 2. Качество регулирования Если исследуемая АСР устойчива, то может возникнуть вопрос о том, насколько качественно происходит регулирование
- 3. Показатели качества регулирования Показатели качества разбиты на 4 группы: 1) прямые – определяемые непосредственно по кривой
- 4. Прямые показатели качества К ним относятся: степень затухания ψ, перерегулирование σ, статическая ошибка ест, время регулирования
- 5. Колебательный вид снятой переходной характеристики
- 6. Степень затухания Степень затухания ψ определяется по формуле где А1 и А3 - соответственно1-я и3-я амплитуды
- 7. Перерегулирование По колебательной переходной характеристике определяется установившееся значение выходной величины ууст. Перерегулирование определяется так: σ =
- 8. Статическая ошибка Статическая ошибка определяется так: ест = х – ууст, где х - входная величина.
- 9. Время регулирования Время достижения первого максимума: tм определяется по графику. Время регулирования tp определяется следующим образом:
- 10. Корневые показатели качества К ним относятся: степень колебательности m, степень устойчивости η и др. Не требуют
- 11. Частотные показатели качества Для определения частотных показателей качества требуется построение АФХ разомкнутой системы и АЧХ замкнутой
- 12. Связи между показателями качества Описанные выше показатели качества связаны между собой определенными соотношениями:
- 13. Настройка регуляторов
- 14. Типы регуляторов Для управления объектами технологических систем, как правило, используют типовые регуляторы, названия которых соответствуют названиям
- 15. П-регулятор Его передаточная функция Wп(s) = K1. Принцип действия заключается в том, что он вырабатывает управляющее
- 16. И-регулятор Его передаточная функция Управляющее воздействие пропорционально интегралу от ошибки.
- 17. Д-регулятор Его передаточная функция Генерирует управляющее воздействие только при изменении регулируемой величины:
- 18. ПИ-регулятор Структурная схема и передаточная функция ПИ-регулятора:
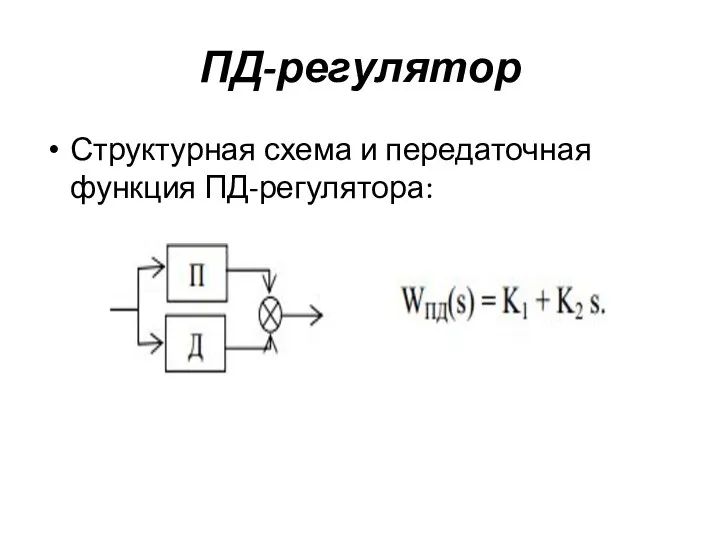
- 19. ПД-регулятор Структурная схема и передаточная функция ПД-регулятора:
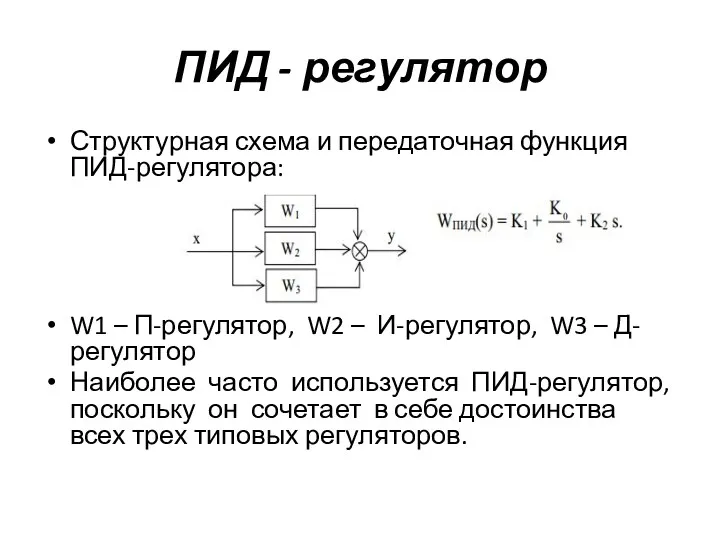
- 20. ПИД - регулятор Структурная схема и передаточная функция ПИД-регулятора: W1 – П-регулятор, W2 – И-регулятор, W3
- 21. Определение оптимальных настроек регуляторов Регулятор, включенный в АСР, может иметь несколько настроек, каждая из которых может
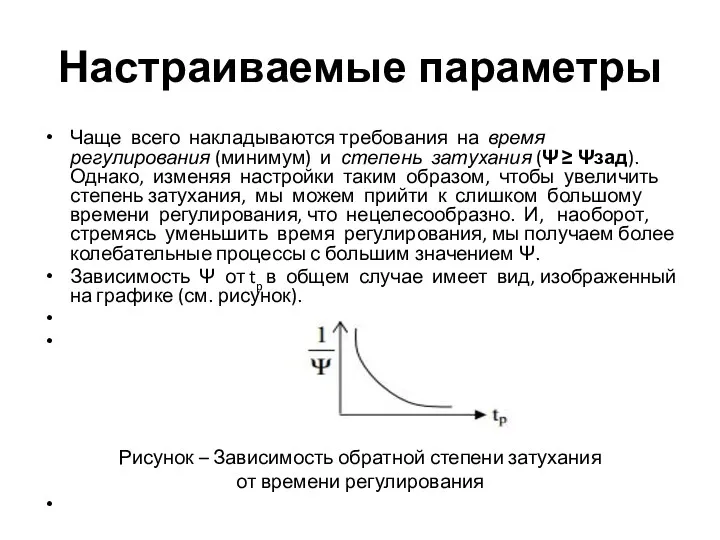
- 22. Настраиваемые параметры Чаще всего накладываются требования на время регулирования (минимум) и степень затухания (Ψ ≥ Ψзад).
- 23. Математические методы настройки Поэтому для определения оптимальных настроек разработан ряд математических методов, среди которых метод D-разбиения.
- 24. Построение кривой D-разбиения Последовательность построения: 1) Определяется характеристический полином замкнутой системы ХПЗС Dз(s) с неизвестными настройками.
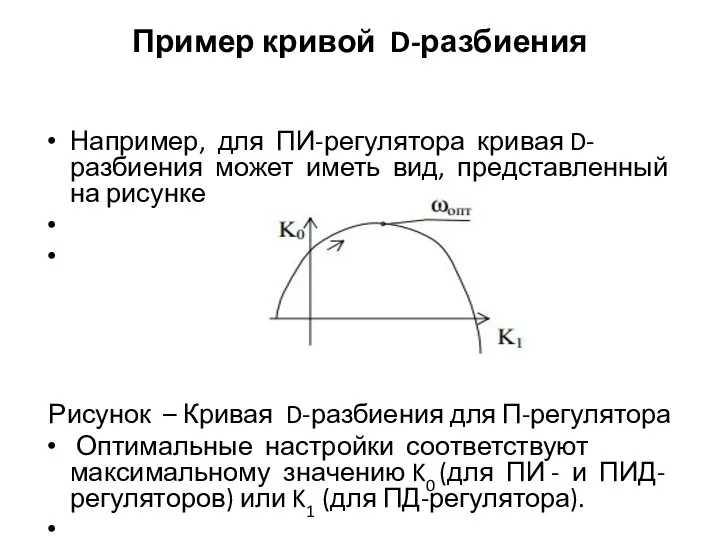
- 25. Пример кривой D-разбиения Например, для ПИ-регулятора кривая D-разбиения может иметь вид, представленный на рисунке Рисунок –
- 26. Автоматическое регулирование на основе нечеткой логики
- 27. Нечеткая логика В последнее время для управления системами, например системой светодиодного освещения или системой кондиционирования воздуха
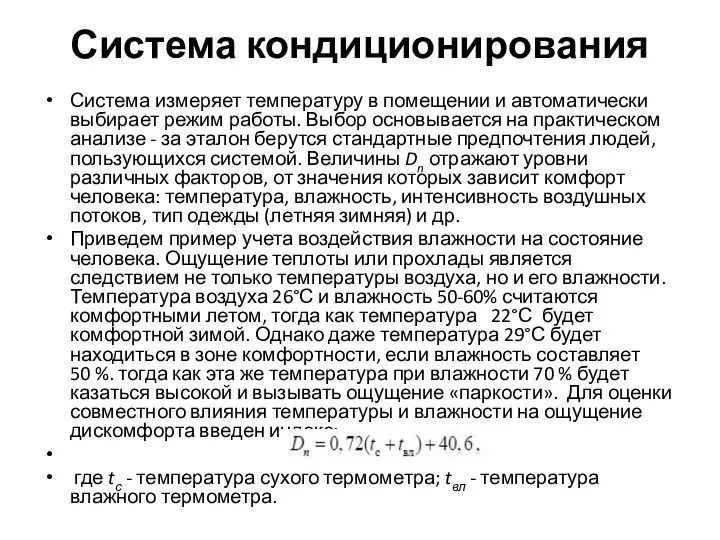
- 28. Система кондиционирования Система измеряет температуру в помещении и автоматически выбирает режим работы. Выбор основывается на практическом
- 29. Таблица степени дискомфорта
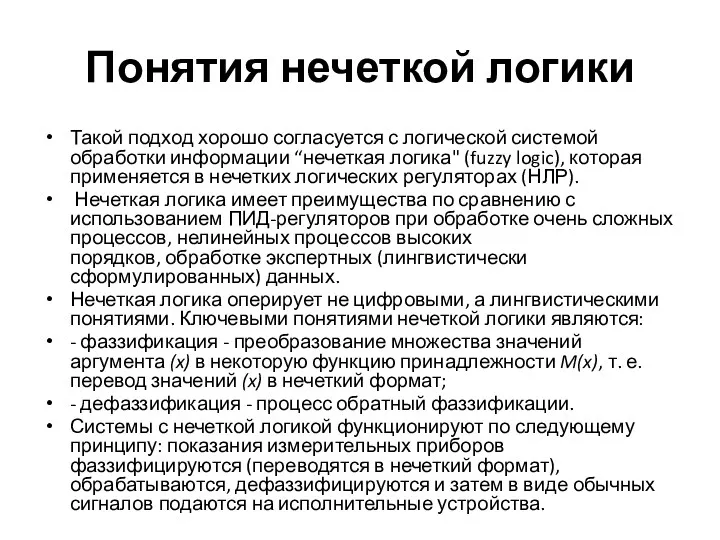
- 30. Понятия нечеткой логики Такой подход хорошо согласуется с логической системой обработки информации “нечеткая логика" (fuzzy logic),
- 31. Принцип управления холодопроизводительностью кондиционера Рассмотрим принцип управления холодопроизводительностью кондиционера с использованием нечеткой логики. Холодопроизводительность, которую должен
- 32. Оценка холодопроизводительности Холодопроизводительность является выходной переменной, которой присваиваются следующие термы: “очень малая”, “малая", “средняя", “большая" н
- 33. Принцип работы кондиционера Каждая запись соответствует своему нечеткому правилу. Например, если разность температур средняя, а скорость
- 34. Функции принадлежности Построим две функции принадлежности. В одном случае аргументом является разность температур (Δt) (рис. 1),
- 35. Рис. 1 – Функция принадлежности для лингвистического аргумента «разность температур»
- 36. Рис.2– Функция принадлежности для лингвистического аргумента «скорость изменения температуры»
- 37. Совместное влияния двух функций принадлежности Результат совместного влияния двух функций принадлежности на значение выходного параметра ''холодопроизводительность"
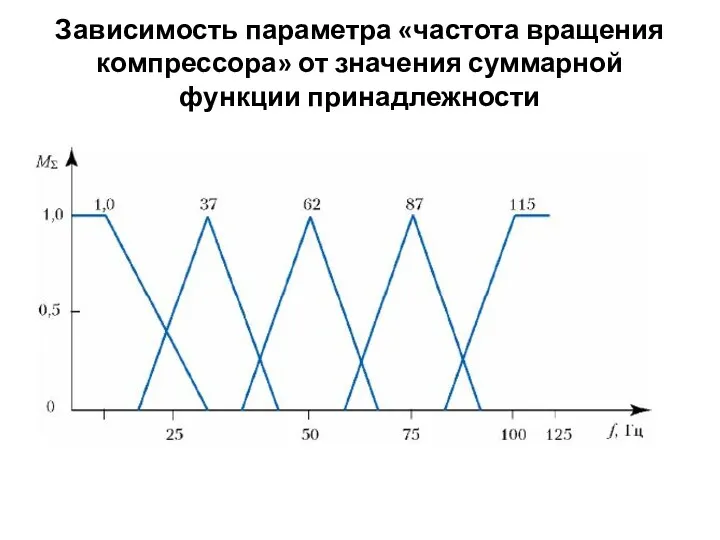
- 38. Переход к скоростям вращения Учитывая, что холодопроизводительность пропорциональна частоте вращения компрессора, можно построить зависимость результирующей функции
- 39. Зависимость параметра «частота вращения компрессора» от значения суммарной функции принадлежности
- 40. Результат Таким образом, найдя лингвистическим методом суммарную функцию принадлежности, после дефаззификации можно перейти к четкому значению
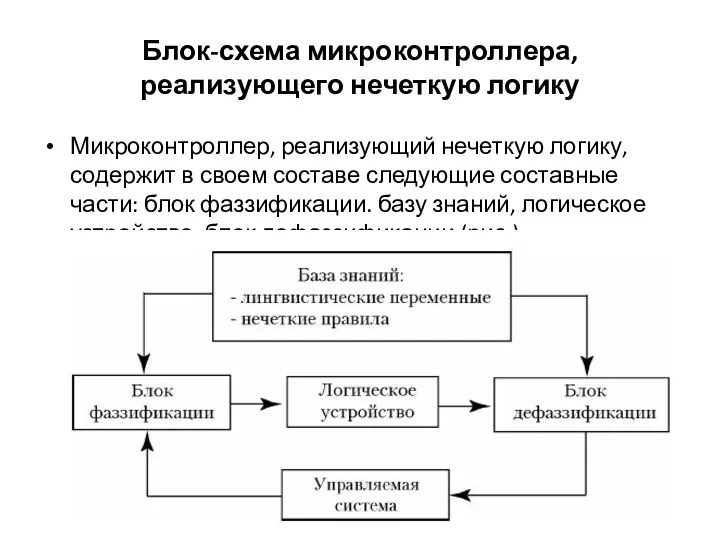
- 41. Блок-схема микроконтроллера, реализующего нечеткую логику Микроконтроллер, реализующий нечеткую логику, содержит в своем составе следующие составные части:
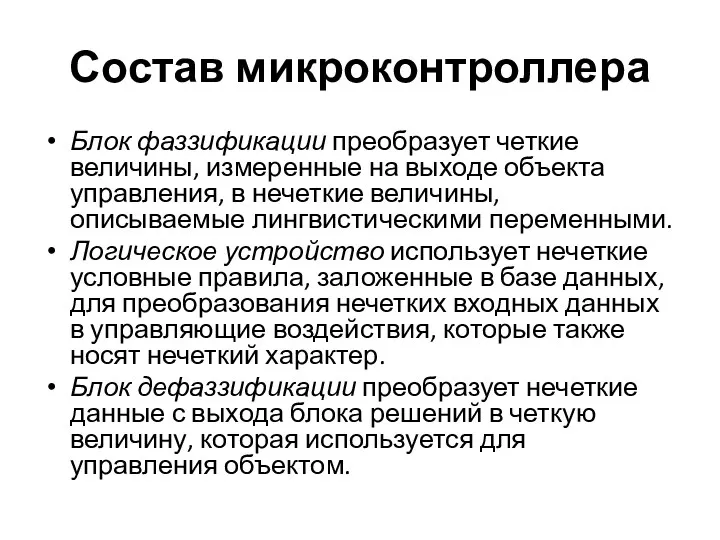
- 42. Состав микроконтроллера Блок фаззификации преобразует четкие величины, измеренные на выходе объекта управления, в нечеткие величины, описываемые
- 43. Преимущества метода нечеткой логики В системе управления “Fuzzy Logic” температура постоянно корректируется, исходя из текущих значений
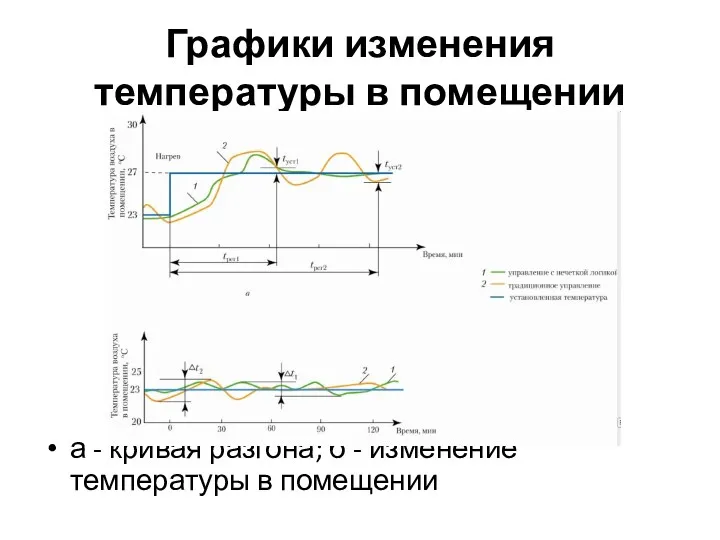
- 44. Графики изменения температуры в помещении а - кривая разгона; б - изменение температуры в помещении
- 46. Скачать презентацию
Качество регулирования
Если исследуемая АСР устойчива, то может возникнуть вопрос о том,
Качество регулирования
Если исследуемая АСР устойчива, то может возникнуть вопрос о том,
Показатели качества регулирования
Показатели качества разбиты на 4 группы:
1) прямые –
Показатели качества регулирования
Показатели качества разбиты на 4 группы:
1) прямые –
Прямые показатели качества
К ним относятся:
степень затухания ψ,
перерегулирование
Прямые показатели качества
К ним относятся:
степень затухания ψ,
перерегулирование

Колебательный вид снятой переходной характеристики
Колебательный вид снятой переходной характеристики
Степень затухания
Степень затухания ψ определяется по формуле
где А1 и А3 -
Степень затухания
Степень затухания ψ определяется по формуле
где А1 и А3 -
Перерегулирование
По колебательной переходной характеристике определяется установившееся значение выходной величины ууст.
Перерегулирование
Перерегулирование
По колебательной переходной характеристике определяется установившееся значение выходной величины ууст.
Перерегулирование
Статическая ошибка
Статическая ошибка определяется так:
ест = х – ууст,
где х -
Статическая ошибка
Статическая ошибка определяется так:
ест = х – ууст,
где х -
Время регулирования
Время достижения первого максимума: tм определяется по графику.
Время регулирования
Время регулирования
Время достижения первого максимума: tм определяется по графику.
Время регулирования
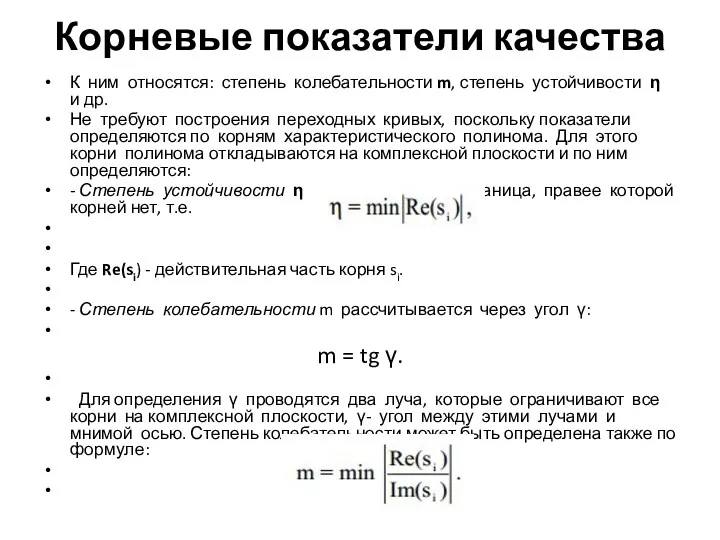
Корневые показатели качества
К ним относятся: степень колебательности m, степень устойчивости η
Корневые показатели качества
К ним относятся: степень колебательности m, степень устойчивости η
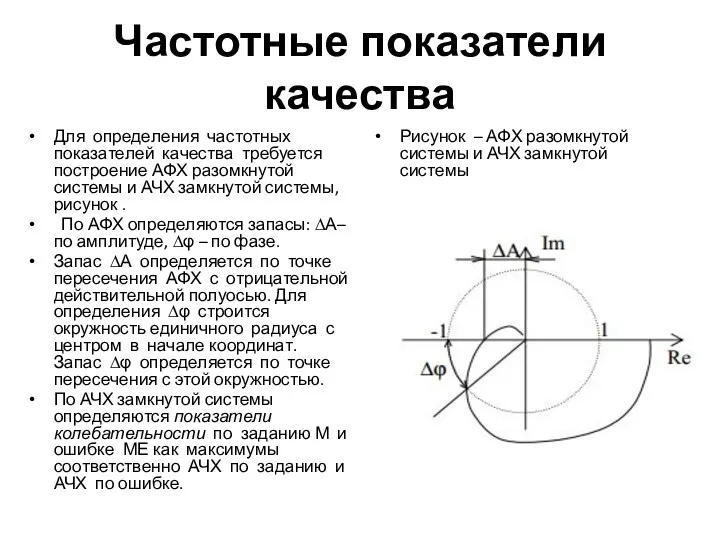
Частотные показатели качества
Для определения частотных показателей качества требуется построение АФХ разомкнутой
Частотные показатели качества
Для определения частотных показателей качества требуется построение АФХ разомкнутой
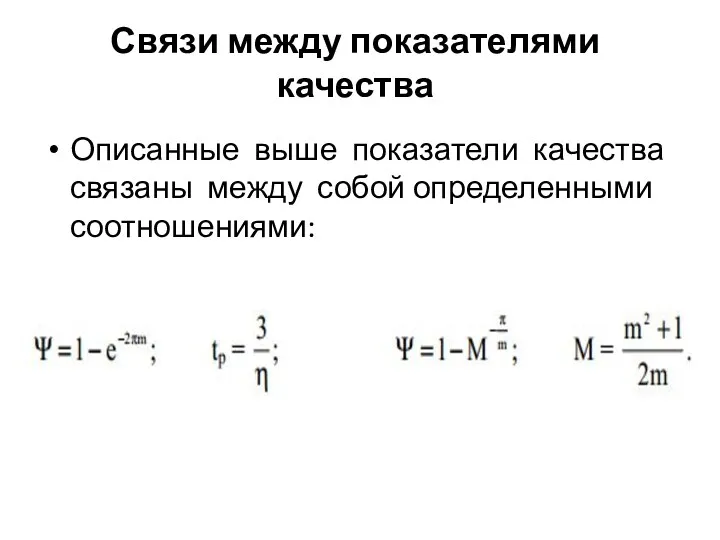
Связи между показателями качества
Описанные выше показатели качества связаны между собой определенными
Связи между показателями качества
Описанные выше показатели качества связаны между собой определенными
Настройка регуляторов
Настройка регуляторов
Типы регуляторов
Для управления объектами технологических систем, как правило, используют типовые регуляторы,
Типы регуляторов
Для управления объектами технологических систем, как правило, используют типовые регуляторы,
П-регулятор
Его передаточная функция
Wп(s) = K1.
Принцип действия заключается в том, что
П-регулятор
Его передаточная функция
Wп(s) = K1.
Принцип действия заключается в том, что
И-регулятор
Его передаточная функция
Управляющее воздействие пропорционально интегралу от ошибки.
И-регулятор
Его передаточная функция
Управляющее воздействие пропорционально интегралу от ошибки.
Д-регулятор
Его передаточная функция
Генерирует управляющее воздействие только при изменении регулируемой величины:
Д-регулятор
Его передаточная функция
Генерирует управляющее воздействие только при изменении регулируемой величины:
ПИ-регулятор
Структурная схема и передаточная функция ПИ-регулятора:
ПИ-регулятор
Структурная схема и передаточная функция ПИ-регулятора:
ПД-регулятор
Структурная схема и передаточная функция ПД-регулятора:
ПД-регулятор
Структурная схема и передаточная функция ПД-регулятора:
ПИД - регулятор
Структурная схема и передаточная функция ПИД-регулятора:
W1 – П-регулятор,
ПИД - регулятор
Структурная схема и передаточная функция ПИД-регулятора:
W1 – П-регулятор,
Определение оптимальных настроек регуляторов
Регулятор, включенный в АСР, может иметь несколько настроек,
Определение оптимальных настроек регуляторов
Регулятор, включенный в АСР, может иметь несколько настроек,
Настраиваемые параметры
Чаще всего накладываются требования на время регулирования (минимум) и степень
Настраиваемые параметры
Чаще всего накладываются требования на время регулирования (минимум) и степень
Математические методы настройки
Поэтому для определения оптимальных настроек разработан ряд математических методов,
Математические методы настройки
Поэтому для определения оптимальных настроек разработан ряд математических методов,
Построение кривой D-разбиения
Последовательность построения:
1) Определяется характеристический полином замкнутой системы ХПЗС
Построение кривой D-разбиения
Последовательность построения:
1) Определяется характеристический полином замкнутой системы ХПЗС
Пример кривой D-разбиения
Например, для ПИ-регулятора кривая D-разбиения может иметь вид,
Пример кривой D-разбиения
Например, для ПИ-регулятора кривая D-разбиения может иметь вид,
Автоматическое регулирование на основе нечеткой логики
Автоматическое регулирование на основе нечеткой логики
Нечеткая логика
В последнее время для управления системами, например системой светодиодного освещения
Нечеткая логика
В последнее время для управления системами, например системой светодиодного освещения
Система кондиционирования
Система измеряет температуру в помещении и автоматически выбирает режим работы.
Система кондиционирования
Система измеряет температуру в помещении и автоматически выбирает режим работы.
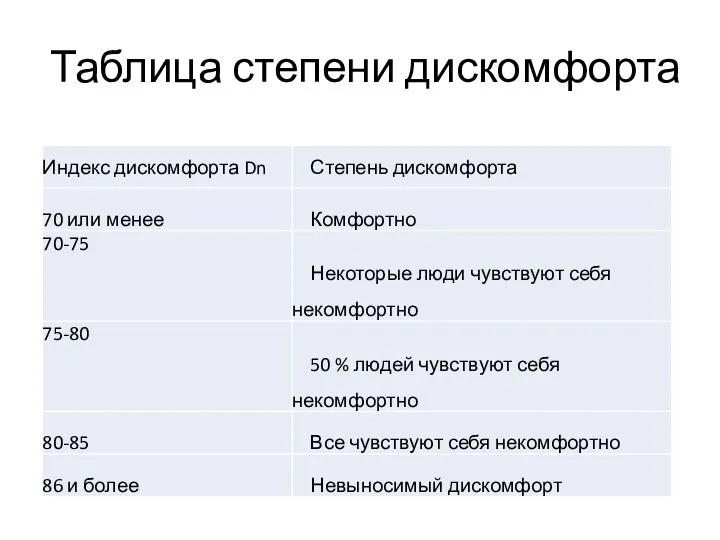
Таблица степени дискомфорта
Таблица степени дискомфорта
Понятия нечеткой логики
Такой подход хорошо согласуется с логической системой обработки информации
Понятия нечеткой логики
Такой подход хорошо согласуется с логической системой обработки информации
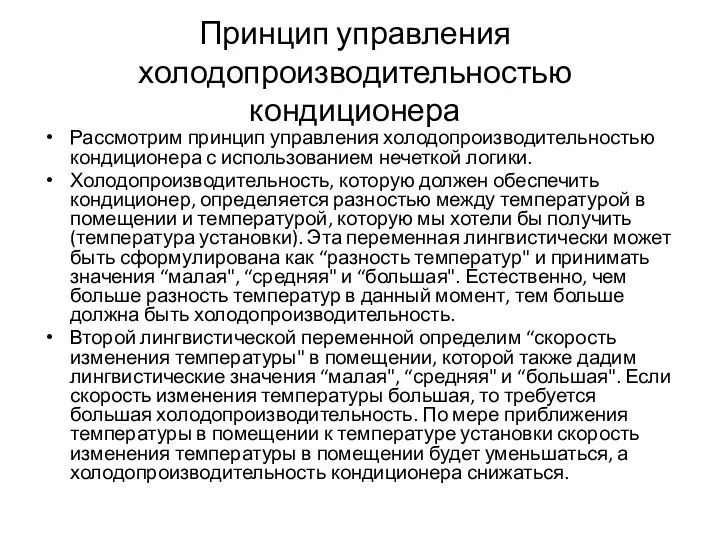
Принцип управления холодопроизводительностью кондиционера
Рассмотрим принцип управления холодопроизводительностью кондиционера с использованием нечеткой
Принцип управления холодопроизводительностью кондиционера
Рассмотрим принцип управления холодопроизводительностью кондиционера с использованием нечеткой
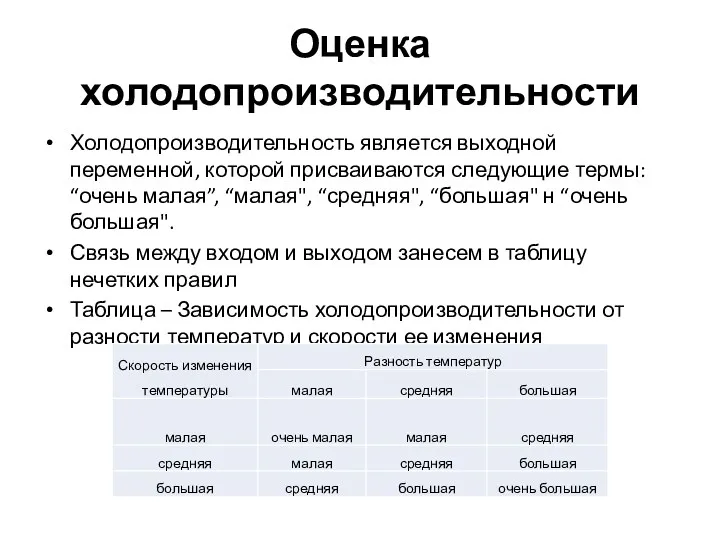
Оценка холодопроизводительности
Холодопроизводительность является выходной переменной, которой присваиваются следующие термы: “очень малая”,
Оценка холодопроизводительности
Холодопроизводительность является выходной переменной, которой присваиваются следующие термы: “очень малая”,
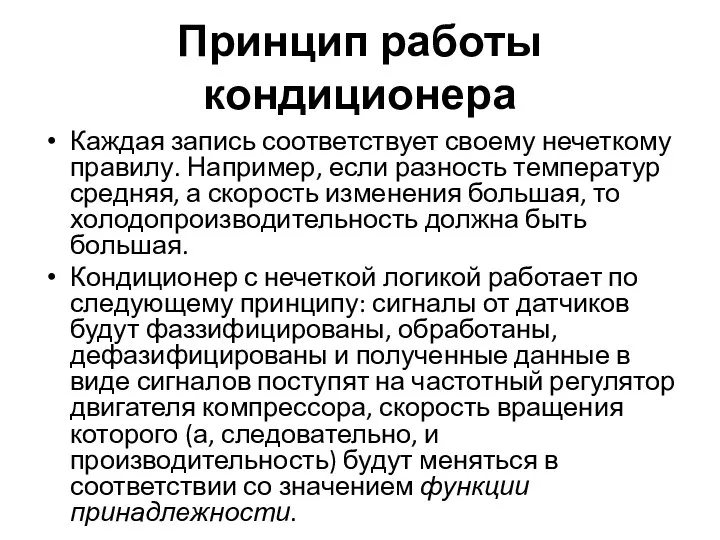
Принцип работы кондиционера
Каждая запись соответствует своему нечеткому правилу. Например, если разность
Принцип работы кондиционера
Каждая запись соответствует своему нечеткому правилу. Например, если разность
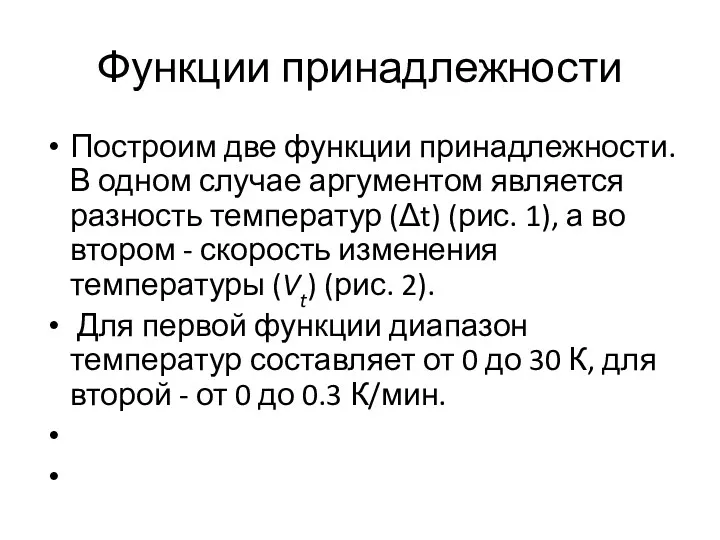
Функции принадлежности
Построим две функции принадлежности. В одном случае аргументом является разность
Функции принадлежности
Построим две функции принадлежности. В одном случае аргументом является разность
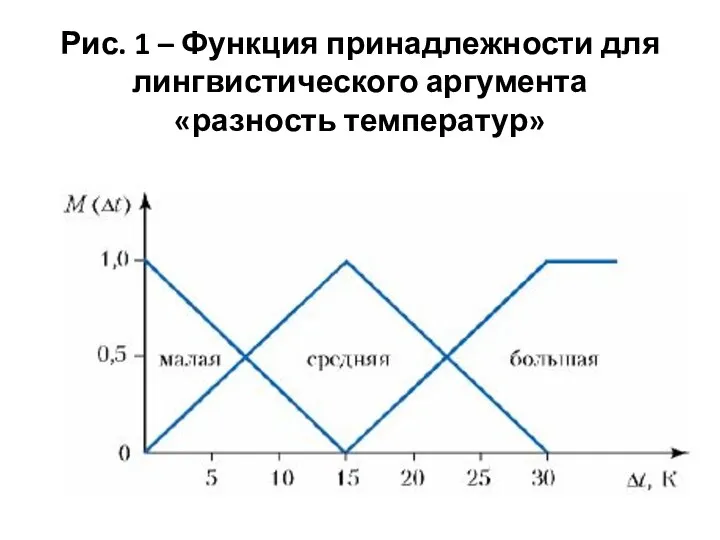
Рис. 1 – Функция принадлежности для лингвистического аргумента
«разность температур»
Рис. 1 – Функция принадлежности для лингвистического аргумента
«разность температур»
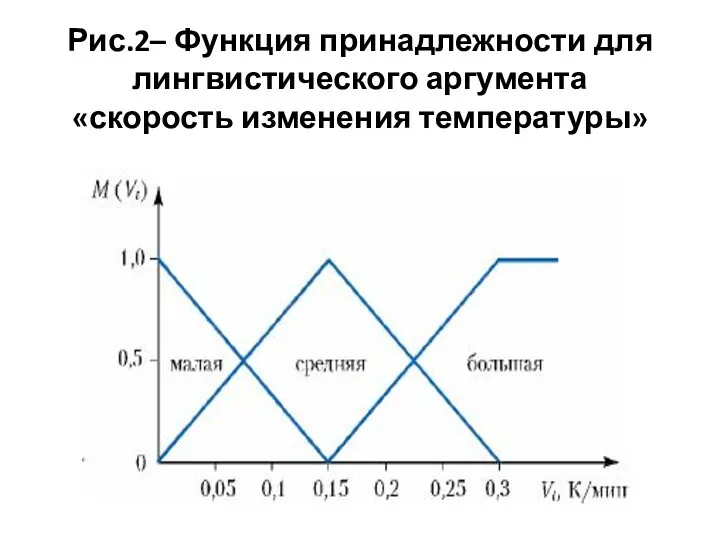
Рис.2– Функция принадлежности для лингвистического аргумента
«скорость изменения температуры»
Рис.2– Функция принадлежности для лингвистического аргумента
«скорость изменения температуры»
Совместное влияния двух функций принадлежности
Результат совместного влияния двух функций принадлежности на
Совместное влияния двух функций принадлежности
Результат совместного влияния двух функций принадлежности на
Переход к скоростям вращения
Учитывая, что холодопроизводительность пропорциональна частоте вращения компрессора, можно
Переход к скоростям вращения
Учитывая, что холодопроизводительность пропорциональна частоте вращения компрессора, можно
Зависимость параметра «частота вращения компрессора» от значения суммарной функции принадлежности
Зависимость параметра «частота вращения компрессора» от значения суммарной функции принадлежности
Результат
Таким образом, найдя лингвистическим методом суммарную функцию
принадлежности, после дефаззификации можно перейти
Результат
Таким образом, найдя лингвистическим методом суммарную функцию принадлежности, после дефаззификации можно перейти
Блок-схема микроконтроллера, реализующего нечеткую логику
Микроконтроллер, реализующий нечеткую логику, содержит в своем
Блок-схема микроконтроллера, реализующего нечеткую логику
Микроконтроллер, реализующий нечеткую логику, содержит в своем
Состав микроконтроллера
Блок фаззификации преобразует четкие величины, измеренные на выходе объекта управления,
Состав микроконтроллера
Блок фаззификации преобразует четкие величины, измеренные на выходе объекта управления,
Преимущества метода нечеткой логики
В системе управления “Fuzzy Logic” температура постоянно корректируется,
Преимущества метода нечеткой логики
В системе управления “Fuzzy Logic” температура постоянно корректируется,
Графики изменения температуры в помещении
а - кривая разгона; б - изменение
Графики изменения температуры в помещении
а - кривая разгона; б - изменение
 7 чудес света урок математики в 3 классе.
7 чудес света урок математики в 3 классе. Числовые выражения. Буквенные выражения
Числовые выражения. Буквенные выражения Математика 1 класс
Математика 1 класс Нахождение площади
Нахождение площади Правильные и неправильные дроби
Правильные и неправильные дроби Презентация для детей Название геометрических предметов
Презентация для детей Название геометрических предметов Решение задач на проценты. Прежде чем закурить - подумай!
Решение задач на проценты. Прежде чем закурить - подумай! 20231010_otkr.urok_8kl_teorma_pifagora
20231010_otkr.urok_8kl_teorma_pifagora Чертежи и развертки простых геометрических тел
Чертежи и развертки простых геометрических тел Решаем задачи
Решаем задачи занятие 105.Первообразная.Неопределенный интеграл
занятие 105.Первообразная.Неопределенный интеграл Прямоугольная система координат. Координаты вектора
Прямоугольная система координат. Координаты вектора Үшбұрыштар теңдігінің белгілері
Үшбұрыштар теңдігінің белгілері Учимся писать цифру 4
Учимся писать цифру 4 Сечение многогранника плоскостью
Сечение многогранника плоскостью Геометрические фигуры
Геометрические фигуры Арифметическая игра Числовые Домики
Арифметическая игра Числовые Домики Приведение дробей к общему знаменателю
Приведение дробей к общему знаменателю Матдрака 2011. Математический фестиваль
Матдрака 2011. Математический фестиваль Осевая и цетральная симметрия
Осевая и цетральная симметрия ОГЭ по математике. Задание 1-5
ОГЭ по математике. Задание 1-5 Решение сложных уравнений (4 класс)
Решение сложных уравнений (4 класс) Сравнение дробей
Сравнение дробей Свойства арифметического квадратного корня
Свойства арифметического квадратного корня Повторение знаний о нумерации. Числа от 11 до 20
Повторение знаний о нумерации. Числа от 11 до 20 Деление с остатком (устные вычисления).
Деление с остатком (устные вычисления). Действия с рациональными числами
Действия с рациональными числами Путешествие в мир иррациональных уравнений
Путешествие в мир иррациональных уравнений