- Понятие линейного динамического звена. Лекция 2

Содержание
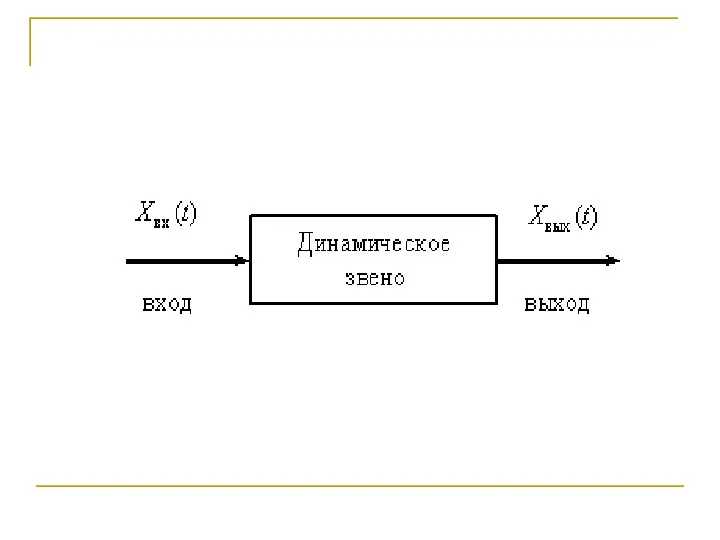
- 2. САУ удобно представлять для анализа и при синтезе в виде взаимосвязанной совокупности отдельных элементов – динамических
- 4. Подробное изучение свойств реальных ОУ и САУ приводит к описанию динамических звеньев в виде нелинейных дифференциальных
- 5. Уравнение линейного динамического звена имеет следующий общий вид:
- 6. где - постоянные коэффициенты, Использовать такое описание динамического звена в задачах анализа и синтеза систем и
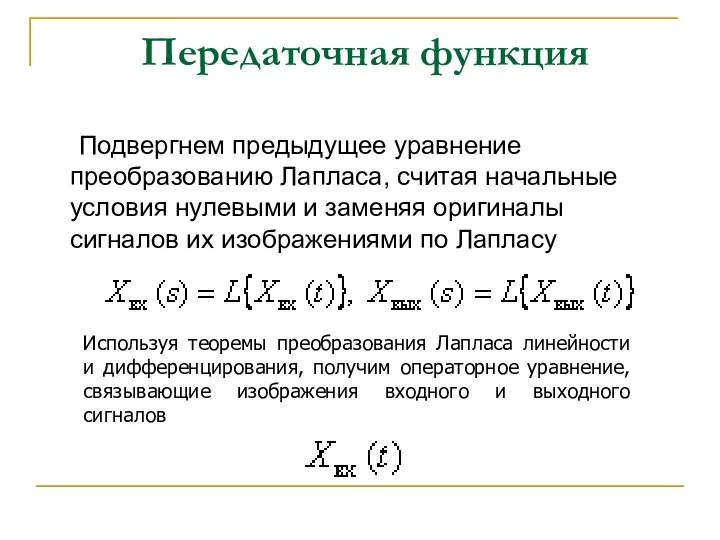
- 7. Передаточная функция Подвергнем предыдущее уравнение преобразованию Лапласа, считая начальные условия нулевыми и заменяя оригиналы сигналов их
- 8. Преобразуем последнее уравнение к следующему виду Получим из последнего уравнения отношение изображений выходного и входного сигналов
- 9. Последнее отношение не зависит от изображений сигналов, определяется только параметрами самого динамического звена и имеет вид
- 10. Уравнение вида называют характеристическим уравнением динамического звена, так как знаменатель передаточной функции – это характеристический полином
- 11. Числитель передаточной функции называют операторным коэффициентом передачи. Его корни, при которых W(p)=0, называются нулями передаточной функции
- 12. Схема САУ, составленная из динамических звеньев, называется структурной. Исследование любой САУ включает в себя математическое описание
- 13. По уравнениям или характеристикам отдельных звеньев составляются уравнения или характеристики системы в целом, на основании которых
- 14. В результате при разбиении системы на звенья направленного действия математическое описание каждого звена может быть составлено
- 15. На основании математического описания составляется структурная схема системы, которая и называется ее математической моделью. На структурной
- 16. При использовании структурной схемы для анализа и синтеза внутри прямоугольников записываются передаточные функции элементов . Получение
- 17. 2.2. . Элементарные динамические звенья Динамика большинства функциональных элементов САУ независимо от исполнения может быть описана
- 18. Известно также, что любой полином произвольного порядка можно разложить на простые сомножители не более, чем второго
- 19. Любую сложную передаточную функцию линеаризованной САУ можно представить как произведение передаточных функций элементарных звеньев. Каждому такому
- 20. В теории удобно ограничиться рассмотрением типовых звеньев, передаточные функции которых имеют числитель или знаменатель, равный единице
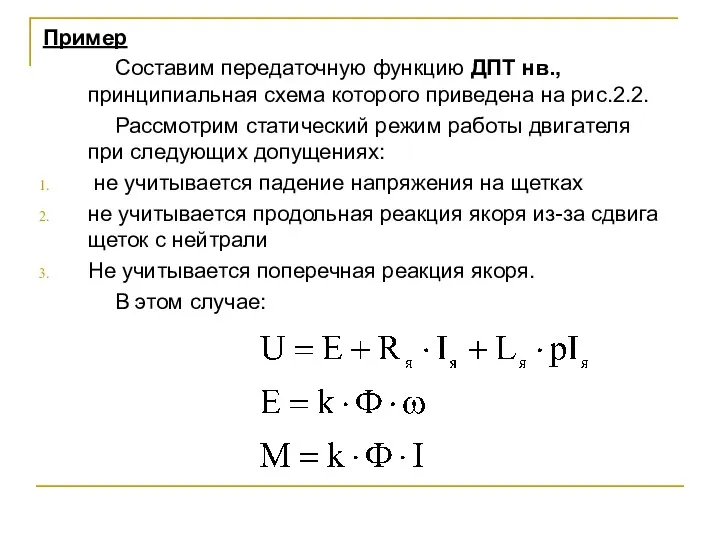
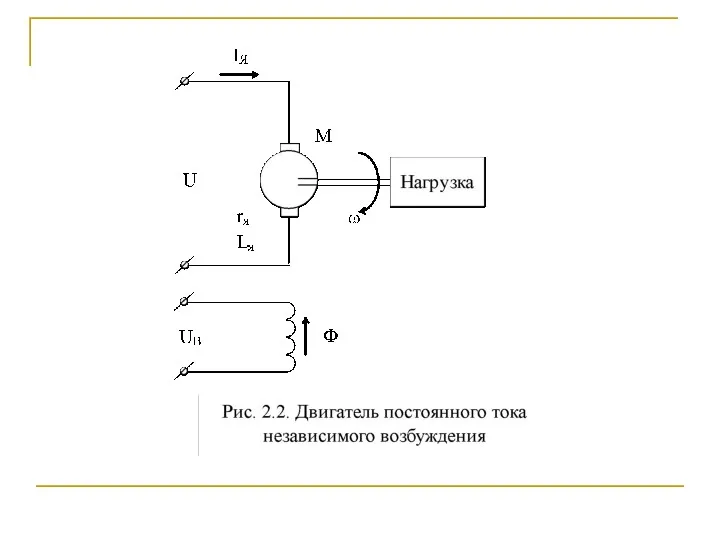
- 21. Пример Составим передаточную функцию ДПТ нв., принципиальная схема которого приведена на рис.2.2. Рассмотрим статический режим работы
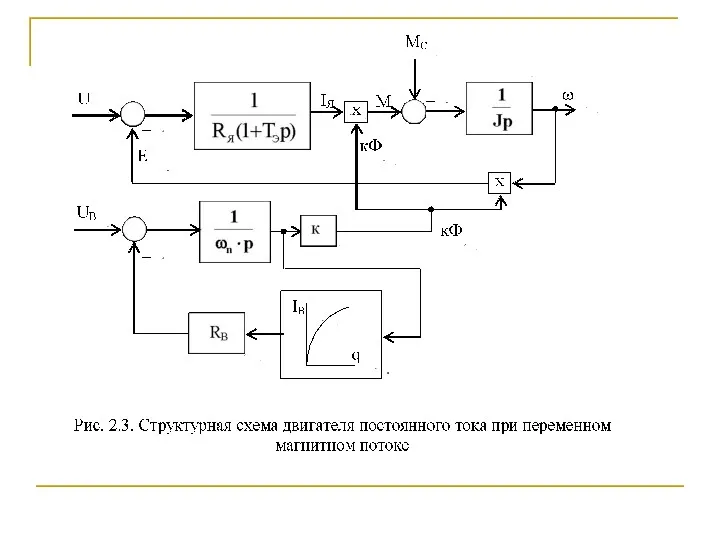
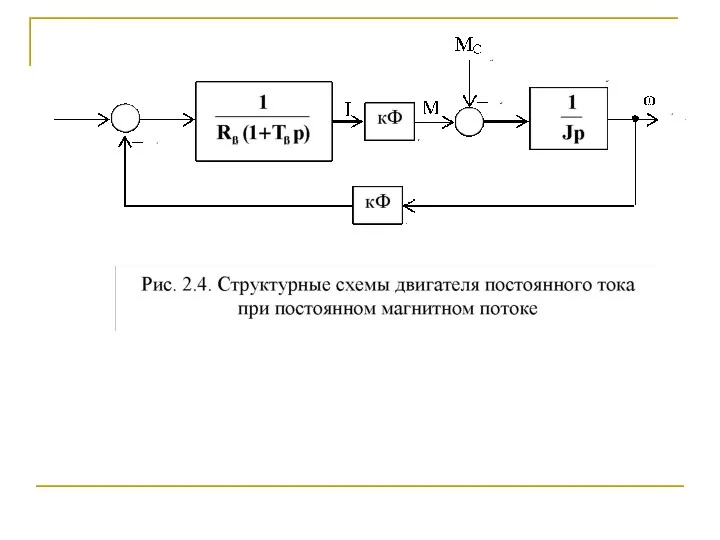
- 23. При изменении частоты вращения возникает динамический момент Структурные схемы, составленные в соответствии с последними уравнениями, приведены
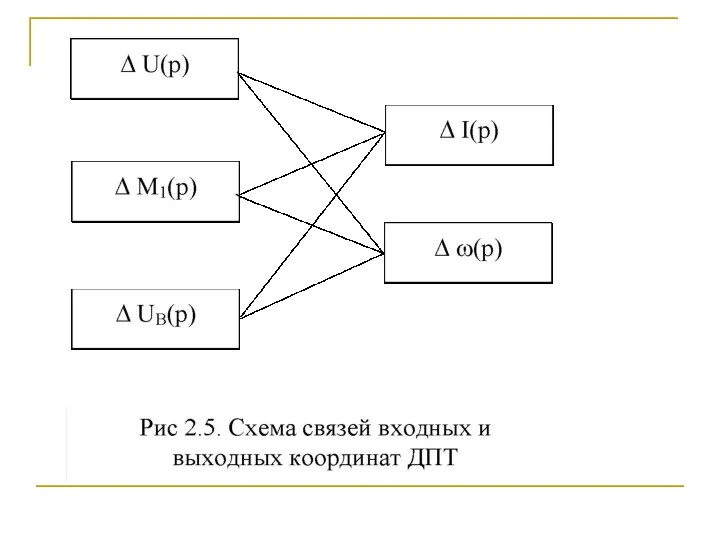
- 24. Найдем передаточную функцию ДПТнв между выходной – частотой вращения и входной – напряжением на обмотке якоря.
- 25. Подставим последнее уравнение в предпоследнее Или преобразуем где электромеханическая постоянная времени
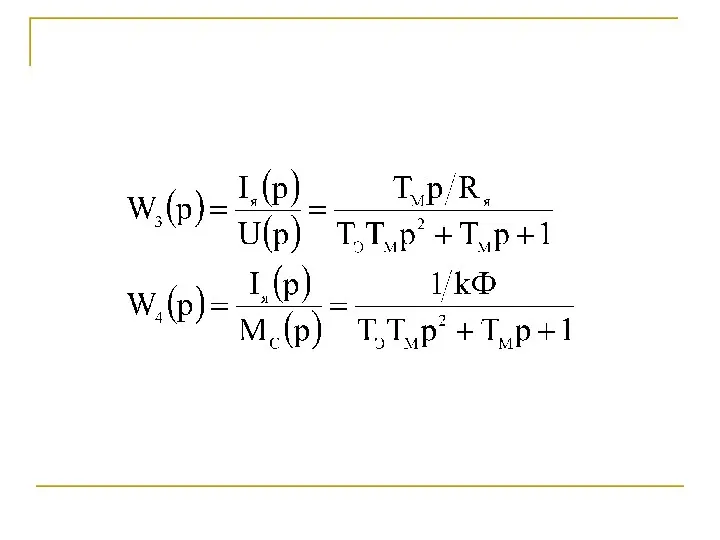
- 26. Из последнего выражения переходя к изображениям Лапласса Решив исходные выражения относительно тока якоря и перейдя также
- 28. Уравнение цепи возбуждения Передаточные функции можно составить дополнительно используя последним уравнением цепи возбуждения Вывести самостоятельно
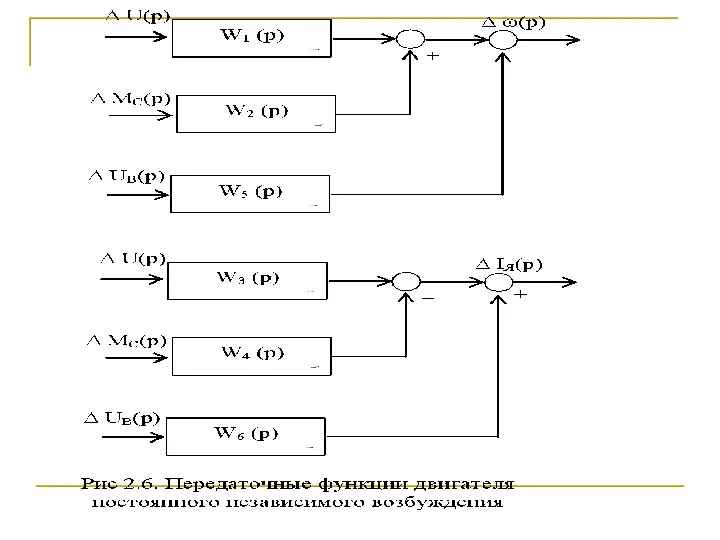
- 32. Таким образом можно получить передаточную функцию ДПТ между любой выходной и входной координатой (рис.2.6) Задача 1
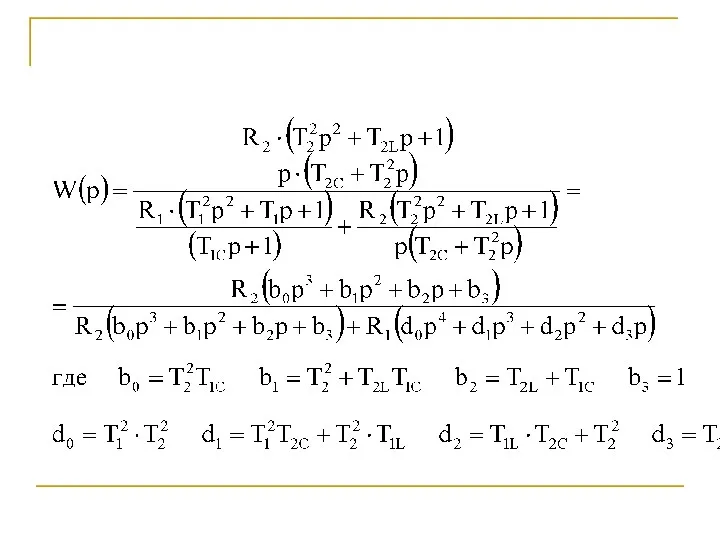
- 36. Передаточная функция эквивалентной цепочки находится как отношение Подставив в последнее уравнение полученные выше выражения, получим искомую
- 39. Скачать презентацию
САУ удобно представлять для анализа и при синтезе в виде взаимосвязанной
САУ удобно представлять для анализа и при синтезе в виде взаимосвязанной
Подробное изучение свойств реальных ОУ и САУ приводит к описанию динамических
Подробное изучение свойств реальных ОУ и САУ приводит к описанию динамических
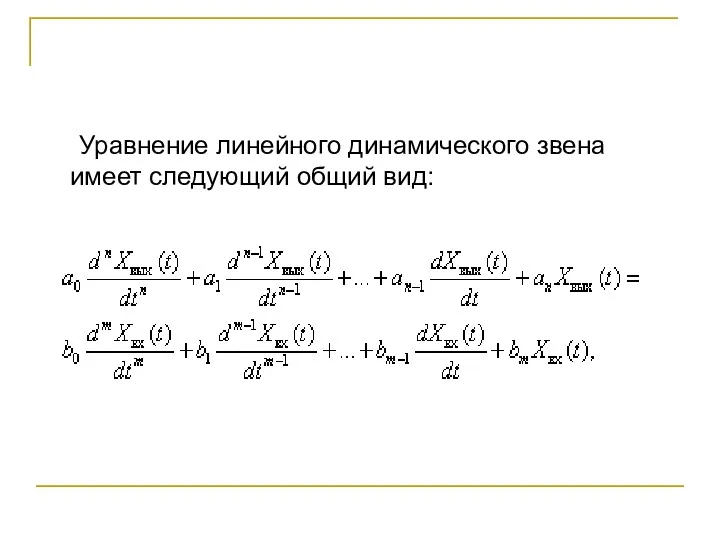
Уравнение линейного динамического звена имеет следующий общий вид:
Уравнение линейного динамического звена имеет следующий общий вид:
где - постоянные коэффициенты,
Использовать такое описание динамического звена в задачах
где - постоянные коэффициенты,
Использовать такое описание динамического звена в задачах
Передаточная функция
Подвергнем предыдущее уравнение преобразованию Лапласа, считая начальные условия нулевыми
Передаточная функция
Подвергнем предыдущее уравнение преобразованию Лапласа, считая начальные условия нулевыми
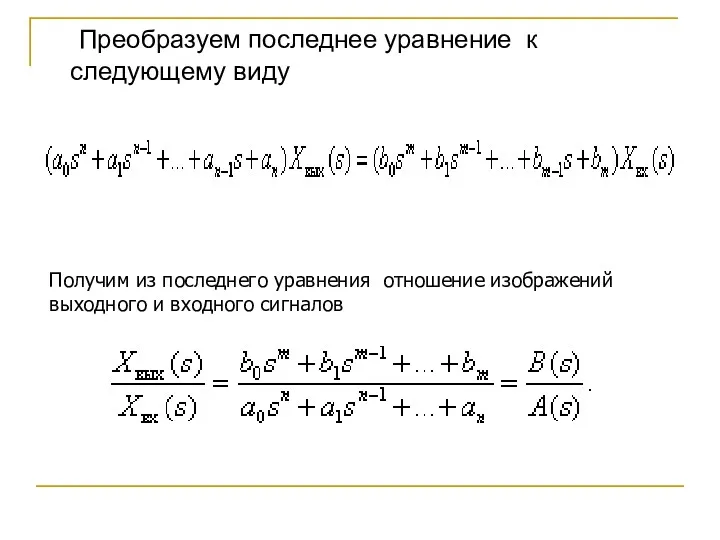
Преобразуем последнее уравнение к следующему виду
Получим из последнего уравнения отношение изображений
Преобразуем последнее уравнение к следующему виду
Получим из последнего уравнения отношение изображений
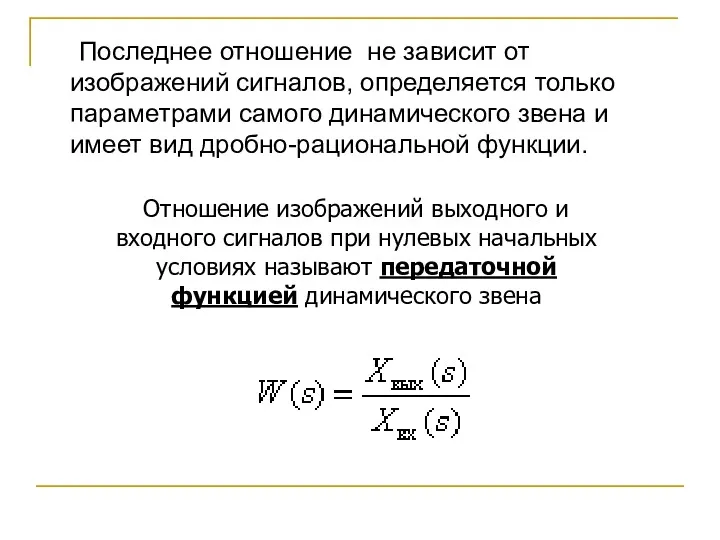
Последнее отношение не зависит от изображений сигналов, определяется только параметрами самого
Последнее отношение не зависит от изображений сигналов, определяется только параметрами самого
Уравнение вида
называют характеристическим уравнением динамического звена, так как знаменатель передаточной
Уравнение вида
называют характеристическим уравнением динамического звена, так как знаменатель передаточной
Числитель передаточной функции называют операторным коэффициентом передачи. Его корни, при которых
Числитель передаточной функции называют операторным коэффициентом передачи. Его корни, при которых
Схема САУ, составленная из динамических звеньев, называется структурной.
Исследование любой САУ включает
Схема САУ, составленная из динамических звеньев, называется структурной.
Исследование любой САУ включает
По уравнениям или характеристикам отдельных звеньев составляются уравнения или характеристики системы
По уравнениям или характеристикам отдельных звеньев составляются уравнения или характеристики системы
В результате при разбиении системы на звенья направленного действия математическое описание
В результате при разбиении системы на звенья направленного действия математическое описание
На основании математического описания составляется структурная схема системы, которая и называется
На основании математического описания составляется структурная схема системы, которая и называется
При использовании структурной схемы для анализа и синтеза внутри прямоугольников записываются
При использовании структурной схемы для анализа и синтеза внутри прямоугольников записываются
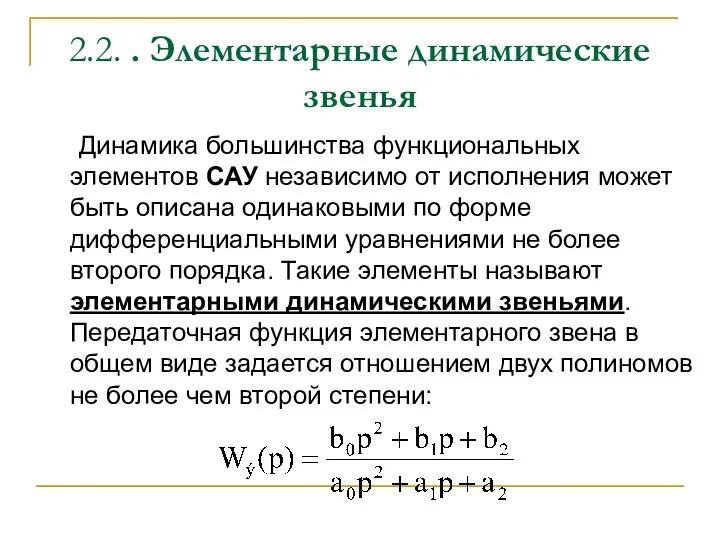
2.2. . Элементарные динамические звенья
Динамика большинства функциональных элементов САУ независимо
2.2. . Элементарные динамические звенья
Динамика большинства функциональных элементов САУ независимо
Известно также, что любой полином произвольного порядка можно разложить на простые
Известно также, что любой полином произвольного порядка можно разложить на простые
Любую сложную передаточную функцию линеаризованной САУ можно представить как произведение передаточных
Любую сложную передаточную функцию линеаризованной САУ можно представить как произведение передаточных
В теории удобно ограничиться рассмотрением типовых звеньев, передаточные функции которых имеют
В теории удобно ограничиться рассмотрением типовых звеньев, передаточные функции которых имеют
Пример
Составим передаточную функцию ДПТ нв., принципиальная схема которого приведена на рис.2.2.
Рассмотрим
Пример
Составим передаточную функцию ДПТ нв., принципиальная схема которого приведена на рис.2.2.
Рассмотрим
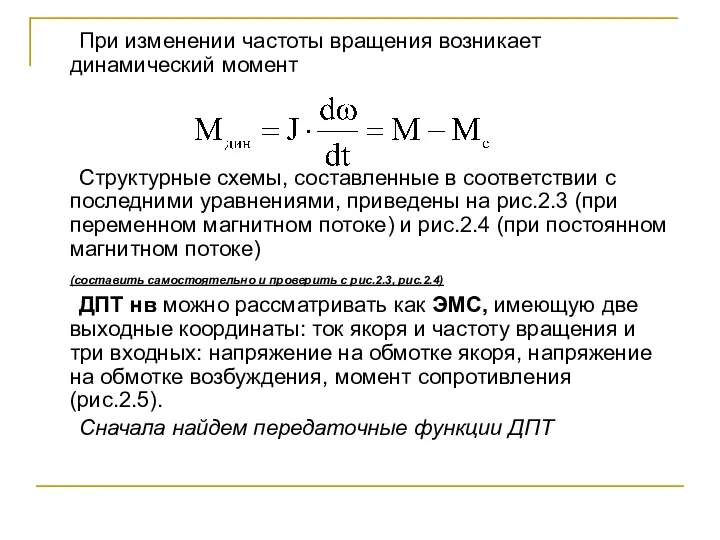
При изменении частоты вращения возникает динамический момент
Структурные схемы, составленные в соответствии
При изменении частоты вращения возникает динамический момент
Структурные схемы, составленные в соответствии
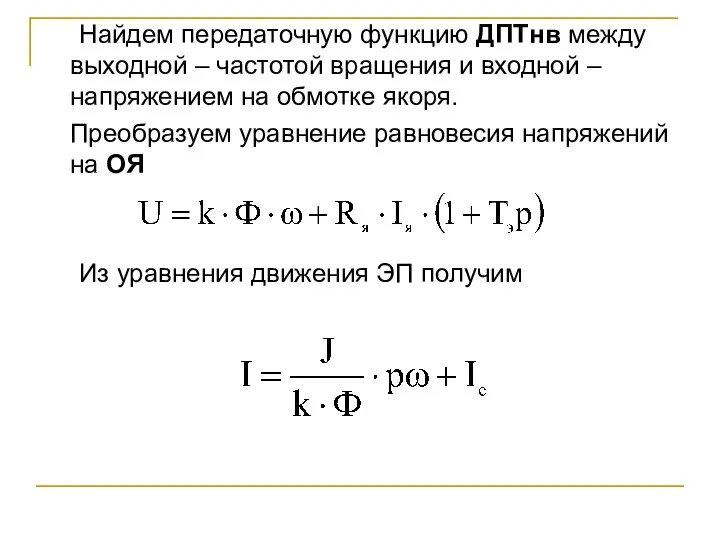
Найдем передаточную функцию ДПТнв между выходной – частотой вращения и входной
Найдем передаточную функцию ДПТнв между выходной – частотой вращения и входной
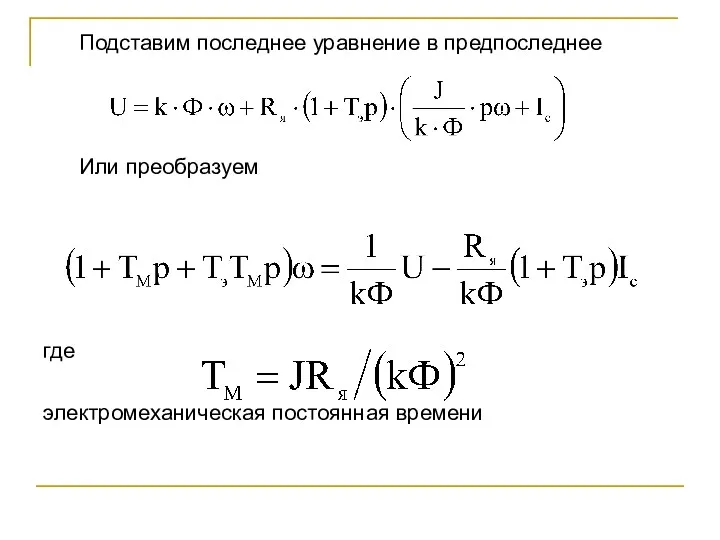
Подставим последнее уравнение в предпоследнее
Или преобразуем
где
электромеханическая постоянная времени
Подставим последнее уравнение в предпоследнее
Или преобразуем
где
электромеханическая постоянная времени
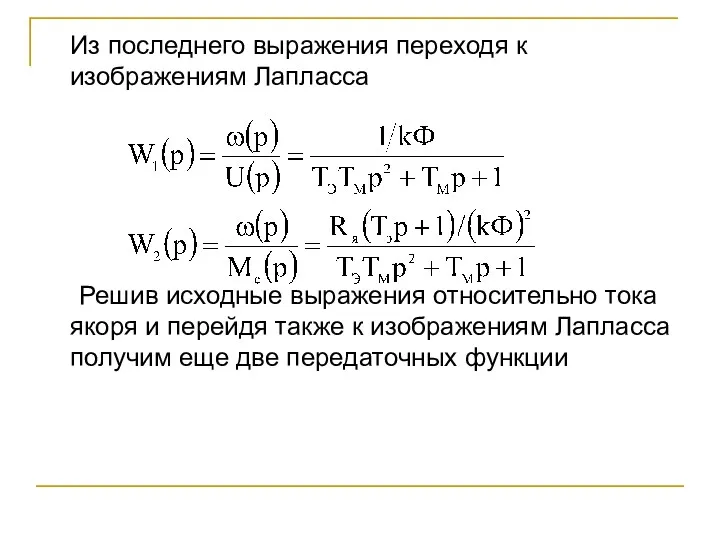
Из последнего выражения переходя к изображениям Лапласса
Решив исходные выражения относительно тока
Из последнего выражения переходя к изображениям Лапласса
Решив исходные выражения относительно тока
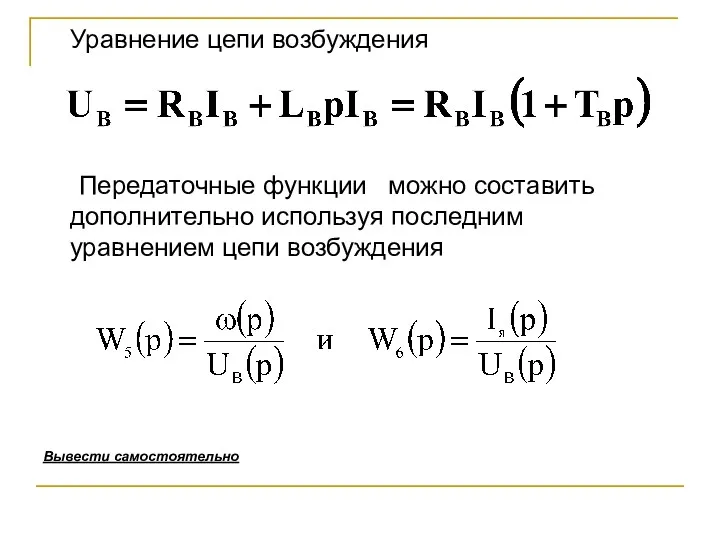
Уравнение цепи возбуждения
Передаточные функции можно составить дополнительно используя последним уравнением цепи
Уравнение цепи возбуждения
Передаточные функции можно составить дополнительно используя последним уравнением цепи
Таким образом можно получить передаточную функцию ДПТ между любой выходной и
Таким образом можно получить передаточную функцию ДПТ между любой выходной и
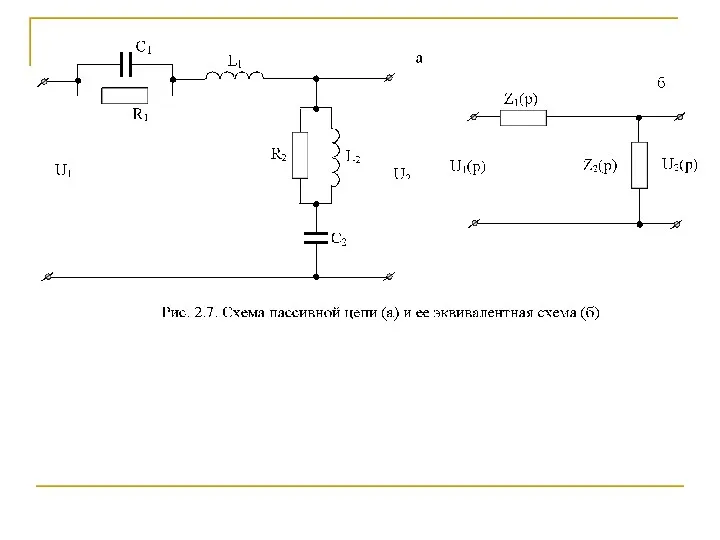
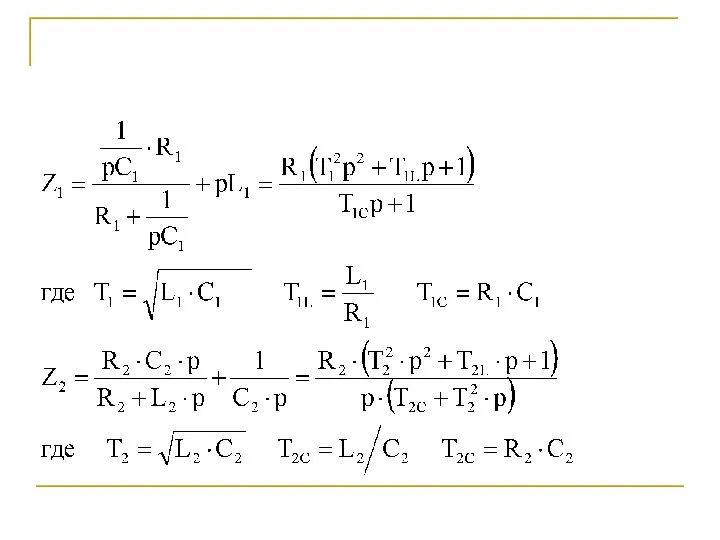
Передаточная функция эквивалентной цепочки находится как отношение
Подставив в последнее уравнение полученные
Передаточная функция эквивалентной цепочки находится как отношение
Подставив в последнее уравнение полученные
 Столбчатые диаграммы. 6 класс
Столбчатые диаграммы. 6 класс Сложение и вычитание десятичных дробей
Сложение и вычитание десятичных дробей Испытания Бернулли (Повторение испытаний)
Испытания Бернулли (Повторение испытаний) Интегрирование простейших рациональных дробей
Интегрирование простейших рациональных дробей Скорость, время. расстояние
Скорость, время. расстояние Интеграл от функции комплексного переменного. Теорема Коши (доказательство). Многозначные функции
Интеграл от функции комплексного переменного. Теорема Коши (доказательство). Многозначные функции Формирование познавательной учебной деятельности на уроках математики с применением технологии развития критического мышления
Формирование познавательной учебной деятельности на уроках математики с применением технологии развития критического мышления Статистика. Понятие, предмет и метод статистики. (Лекция 1)
Статистика. Понятие, предмет и метод статистики. (Лекция 1) Задание В1. Простейшие текстовые задачи. Тренажёр
Задание В1. Простейшие текстовые задачи. Тренажёр Сложение и вычитание чисел
Сложение и вычитание чисел Понятие системы уравнений с двумя переменными
Понятие системы уравнений с двумя переменными Пропорции и отношения. Урок – игра Математическая поликлиника 6 класс
Пропорции и отношения. Урок – игра Математическая поликлиника 6 класс Формулы в математике
Формулы в математике Сумма углов треугольника. Лаборатория экспериментов
Сумма углов треугольника. Лаборатория экспериментов Правильные и неправильные дроби
Правильные и неправильные дроби Площі бічної та повної поверхонь піраміди
Площі бічної та повної поверхонь піраміди 100 логических задач. 2 класс
100 логических задач. 2 класс Задач на проценты
Задач на проценты Коэффициенты слагаемых и упрощение выражений
Коэффициенты слагаемых и упрощение выражений Параллельность плоскостей
Параллельность плоскостей Погрешности результата измерений. Погрешности средств измерений
Погрешности результата измерений. Погрешности средств измерений Математика вокруг нас для детей подготовительной к школе группы
Математика вокруг нас для детей подготовительной к школе группы Development of an information system for evaluating the work of production employees based on statistical analysis
Development of an information system for evaluating the work of production employees based on statistical analysis Арифметический диктант.
Арифметический диктант. Линейная функция и ее график. Формирование навыка построения и чтения графика линейной функции
Линейная функция и ее график. Формирование навыка построения и чтения графика линейной функции тест по математике 2 класс
тест по математике 2 класс Площадь треугольника
Площадь треугольника Круг. Окружность. Длина окружности. Площадь круга. 6 класс
Круг. Окружность. Длина окружности. Площадь круга. 6 класс