Структурные схемы и их преобразование. Типовые динамические звенья САУ и их классификация презентация
- Структурные схемы и их преобразование. Типовые динамические звенья САУ и их классификация

Содержание
- 2. САУ представляет собой совокупность нескольких устройств, в которых происходят явления различной физической природы. * Составление математического
- 3. Для элемента, имеющего один входной X(t) и один выходной Y(t) сигнал, обыкновенное дифференциальное уравнение записывается в
- 4. Если в уравнении (*) функции времени x(t), y(t) заменить на функции комплексной переменной X(p), Y(p), то
- 5. Рассматривая дифференциальное уравнение и находя изображение для левой и правой частей уравнения получаем Зная передаточную функцию
- 6. Динамическим звеном называется любой элемент системы автоматического управления, имеющий определенное математическое описание, т.е. для которого известна
- 7. Типовые динамические звенья Колебательное звено Консервативное звено Апериодическое (инерционное) звено 1 порядка Апериодическое (инерционное) звено 2
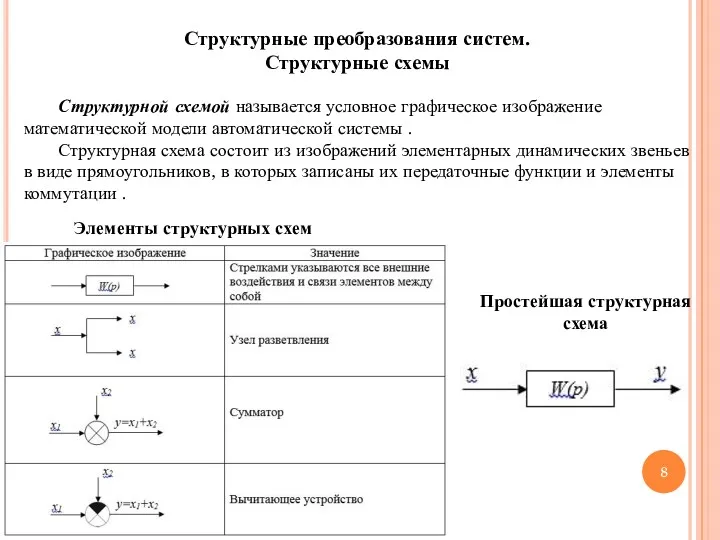
- 8. Структурные преобразования систем. Структурные схемы Структурной схемой называется условное графическое изображение математической модели автоматической системы .
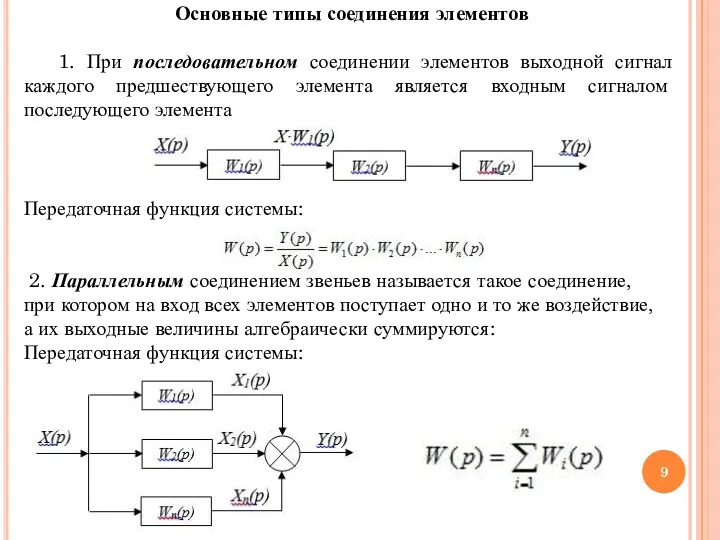
- 9. Основные типы соединения элементов 1. При последовательном соединении элементов выходной сигнал каждого предшествующего элемента является входным
- 10. 3. Встречно-параллельным соединением двух элементов называют такое соединение, при котором выходной сигнал первого элемента поступает на
- 11. Правила преобразования схем Структурную схему любой сложности можно привести к эквивалентной одноконтурной разомкнутой структурной схеме. Сущность
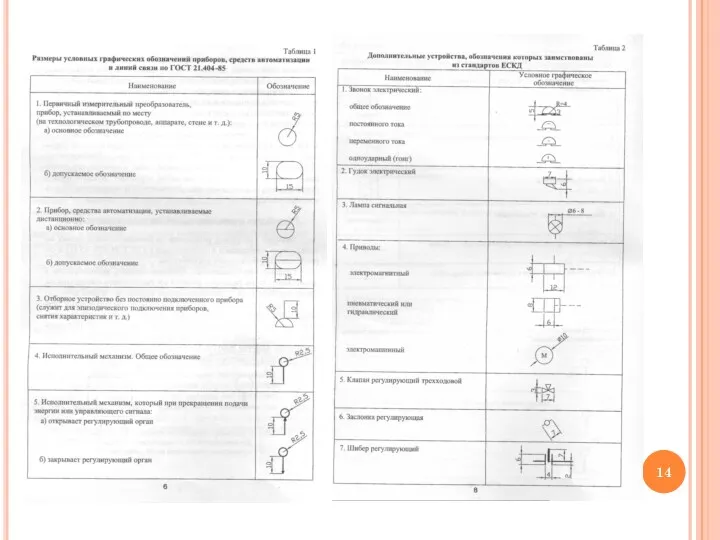
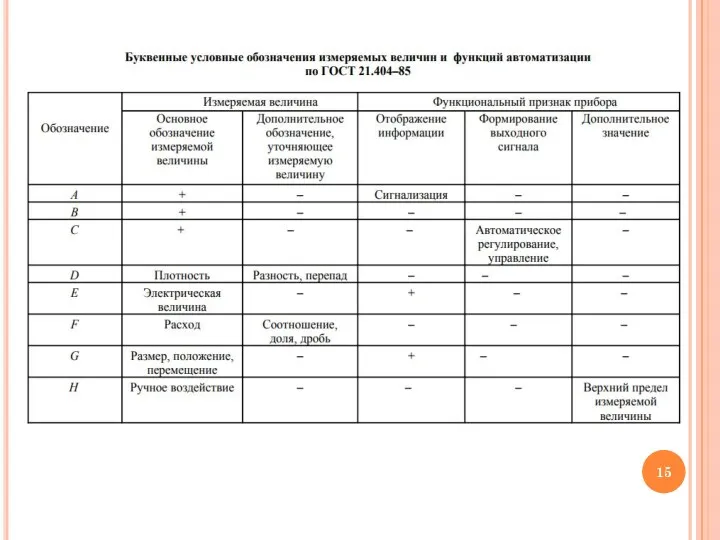
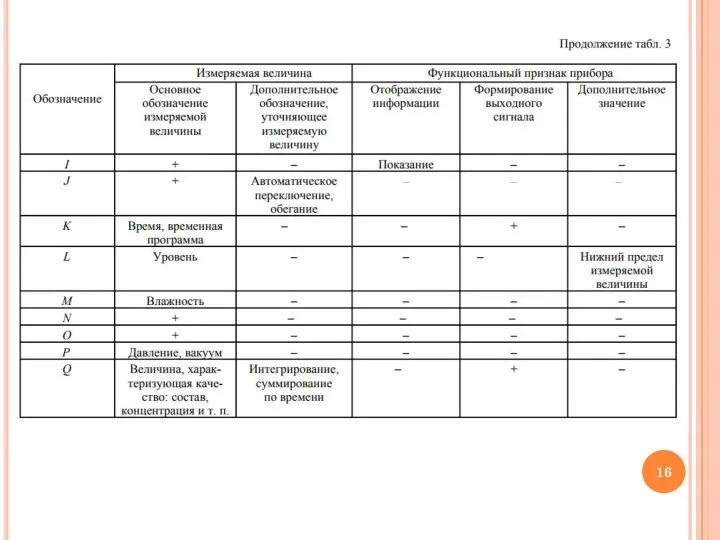
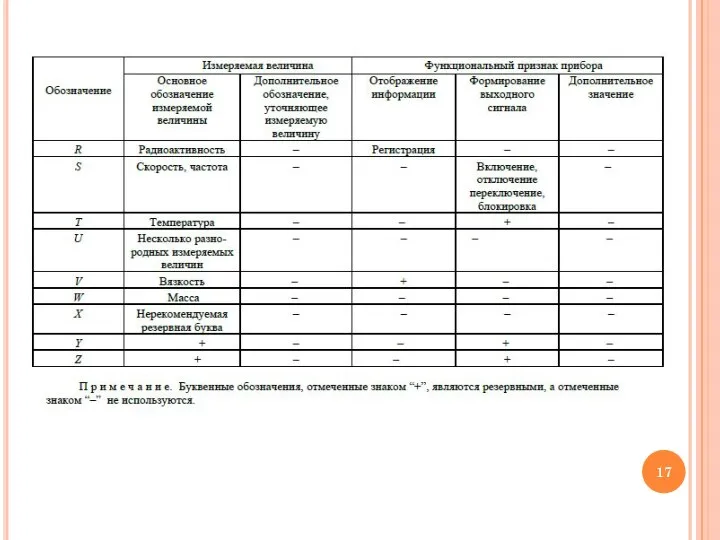
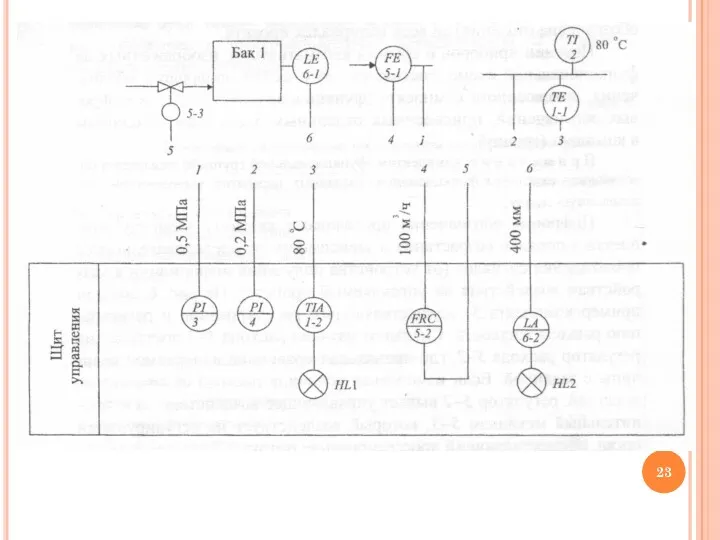
- 12. Функциональные схемы автоматизации Функциональная схема автоматизации (ФСА) представляет собой чертеж, на котором схематически условными обозначениями изображены:
- 13. Изображение технологического оборудования и коммуникаций Технологическое оборудование и коммуникации на ФСА изображают упрощенно (в сокращенном виде),
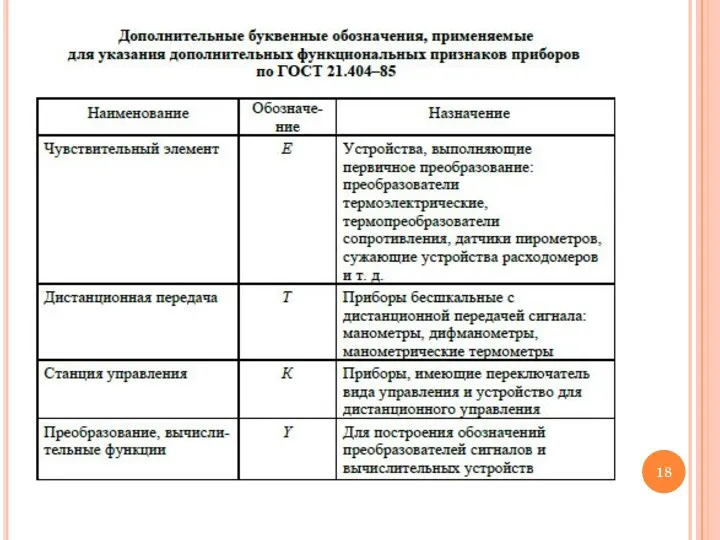
- 20. Методы построения условных обозначений 1 При упрощенном методе построения приборы и средства автоматизации, осуществляющие сложные функции,
- 21. При упрощенном способе первичный измерительный преобразователь (диафрагма или сопло) не показан. Исполнительный механизм обозначения не имеет.
- 22. Приборы и средства автоматизации, встраиваемые в технологическое оборудование и трубопроводы или механизмы, связанные с ними, изображают
- 25. Скачать презентацию
САУ представляет собой совокупность нескольких устройств, в которых происходят явления различной
САУ представляет собой совокупность нескольких устройств, в которых происходят явления различной
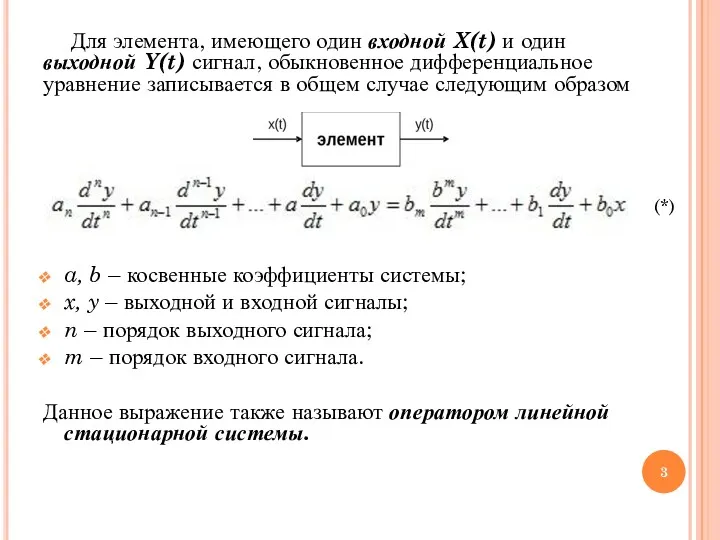
Для элемента, имеющего один входной X(t) и один выходной Y(t) сигнал, обыкновенное дифференциальное уравнение записывается
Для элемента, имеющего один входной X(t) и один выходной Y(t) сигнал, обыкновенное дифференциальное уравнение записывается
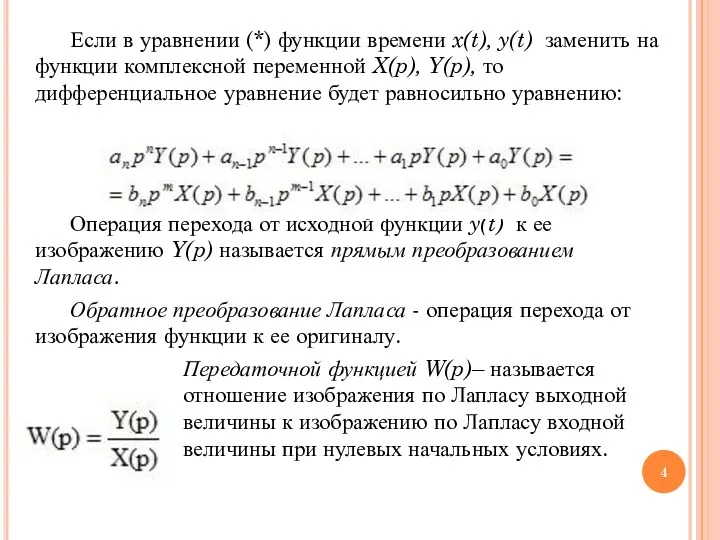
Если в уравнении (*) функции времени x(t), y(t) заменить на функции
Если в уравнении (*) функции времени x(t), y(t) заменить на функции
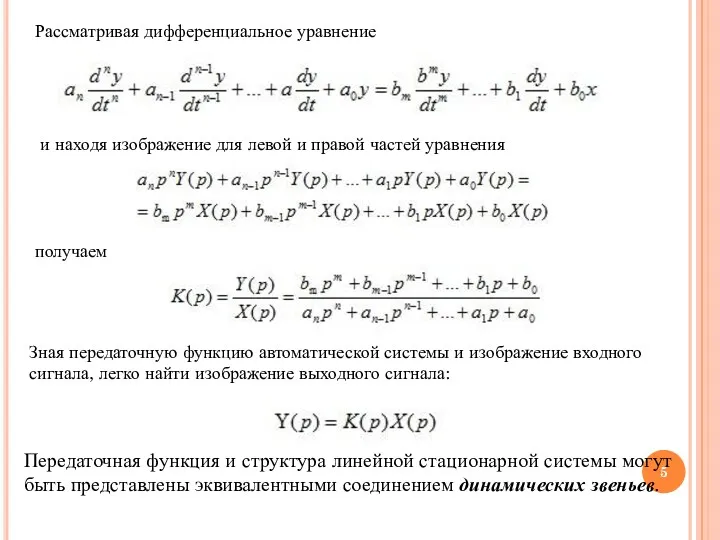
Рассматривая дифференциальное уравнение
и находя изображение для левой и правой частей
Рассматривая дифференциальное уравнение
и находя изображение для левой и правой частей
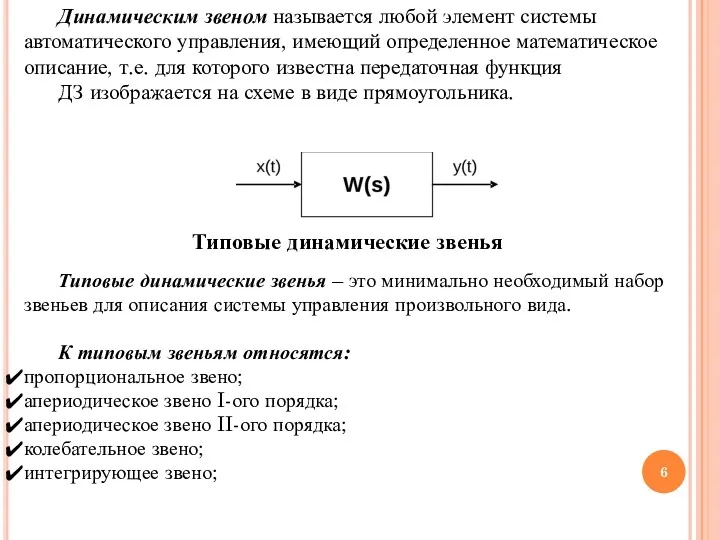
Динамическим звеном называется любой элемент системы автоматического управления, имеющий определенное математическое
Динамическим звеном называется любой элемент системы автоматического управления, имеющий определенное математическое
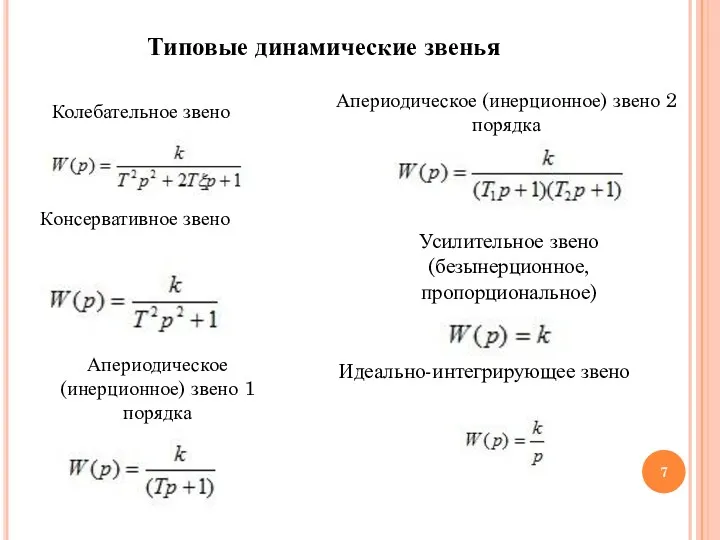
Типовые динамические звенья
Колебательное звено
Консервативное звено
Апериодическое (инерционное) звено 1 порядка
Апериодическое (инерционное) звено
Типовые динамические звенья
Колебательное звено
Консервативное звено
Апериодическое (инерционное) звено 1 порядка
Апериодическое (инерционное) звено
Структурные преобразования систем.
Структурные схемы
Структурной схемой называется условное графическое изображение математической модели
Структурные преобразования систем.
Структурные схемы
Структурной схемой называется условное графическое изображение математической модели
Основные типы соединения элементов
1. При последовательном соединении элементов выходной сигнал каждого
Основные типы соединения элементов
1. При последовательном соединении элементов выходной сигнал каждого
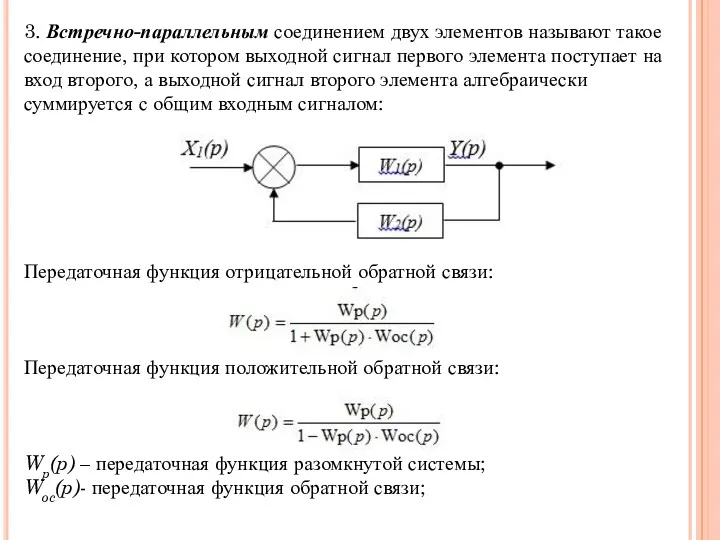
3. Встречно-параллельным соединением двух элементов называют такое соединение, при котором выходной
3. Встречно-параллельным соединением двух элементов называют такое соединение, при котором выходной
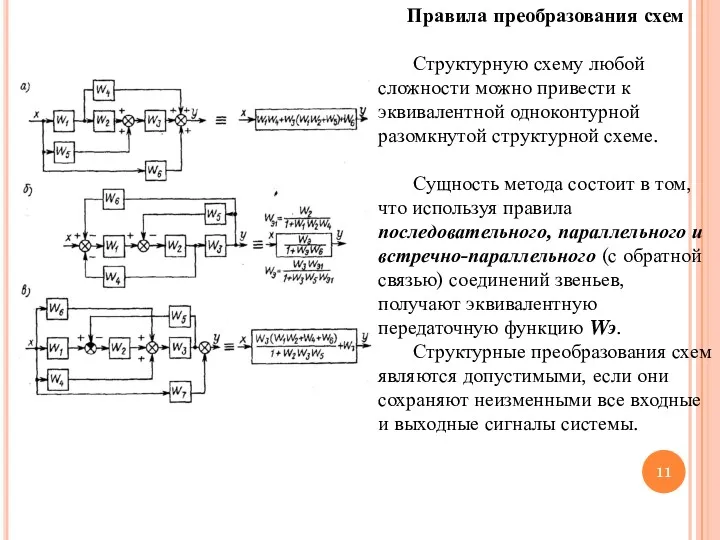
Правила преобразования схем
Структурную схему любой сложности можно привести к эквивалентной одноконтурной
Правила преобразования схем
Структурную схему любой сложности можно привести к эквивалентной одноконтурной
Функциональные схемы автоматизации
Функциональная схема автоматизации (ФСА) представляет собой чертеж, на
Функциональные схемы автоматизации
Функциональная схема автоматизации (ФСА) представляет собой чертеж, на
Изображение технологического оборудования и коммуникаций
Технологическое оборудование и коммуникации на ФСА изображают
Изображение технологического оборудования и коммуникаций
Технологическое оборудование и коммуникации на ФСА изображают

Методы построения условных обозначений
1 При упрощенном методе построения приборы и средства
Методы построения условных обозначений
1 При упрощенном методе построения приборы и средства
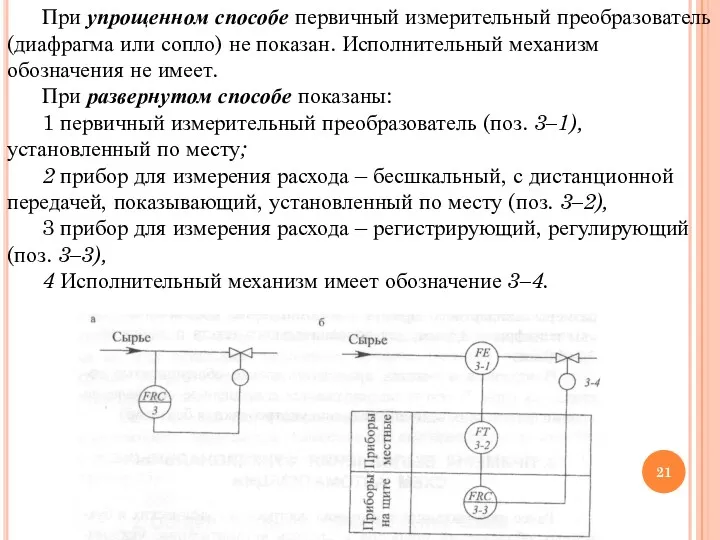
При упрощенном способе первичный измерительный преобразователь (диафрагма или сопло) не показан.
При упрощенном способе первичный измерительный преобразователь (диафрагма или сопло) не показан.
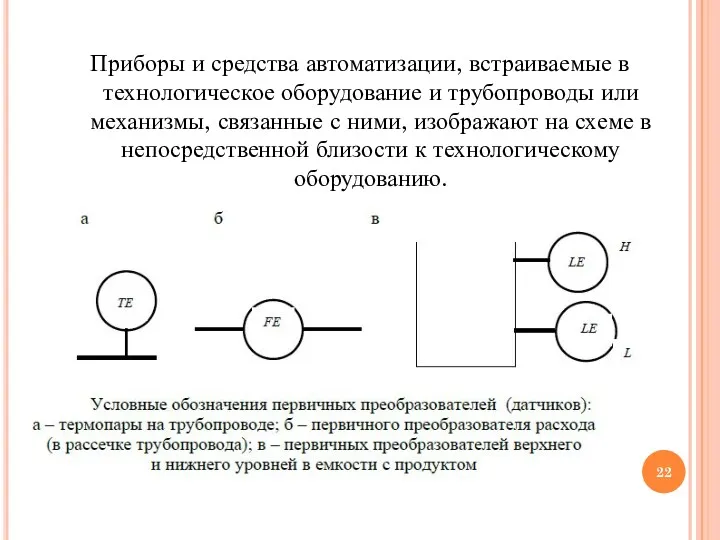
Приборы и средства автоматизации, встраиваемые в технологическое оборудование и трубопроводы или
Приборы и средства автоматизации, встраиваемые в технологическое оборудование и трубопроводы или
 Множества точек на координатной прямой
Множества точек на координатной прямой Сравнение дробей. Классная работа
Сравнение дробей. Классная работа Параллельные плоскости. Признак параллельности плоскостей
Параллельные плоскости. Признак параллельности плоскостей Сложение и вычитание десятичных дробей. Решение задач
Сложение и вычитание десятичных дробей. Решение задач Презентация к уроку математики 2 кл. Угол. Виды углов и треугольников.
Презентация к уроку математики 2 кл. Угол. Виды углов и треугольников. Действия с обыкновенными дробями. Обобщающий урок. 6 класс
Действия с обыкновенными дробями. Обобщающий урок. 6 класс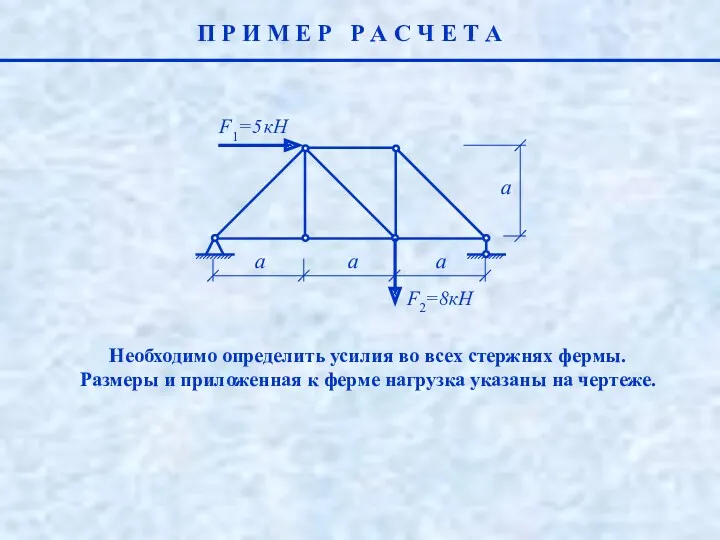 Полный расчёт фермы
Полный расчёт фермы День защитника отечества. Урок математики
День защитника отечества. Урок математики Презентация к уроку математики по теме Переместительное сврйство сложения
Презентация к уроку математики по теме Переместительное сврйство сложения Тригонометрические неравенства
Тригонометрические неравенства Действия с дробями. Задачи на движения
Действия с дробями. Задачи на движения Системы линейных уравнений
Системы линейных уравнений Графический способ решения уравнений
Графический способ решения уравнений Представление целых чисел на координатной оси
Представление целых чисел на координатной оси Порядок выполнения действий
Порядок выполнения действий Прямоугольный параллелепипед
Прямоугольный параллелепипед События и их виды. Теория вероятности события
События и их виды. Теория вероятности события приложение определенного интеграла в геометрии (12 класс)
приложение определенного интеграла в геометрии (12 класс) Векторы и их применение при доказательстве теорем
Векторы и их применение при доказательстве теорем Математический турнир
Математический турнир Математика и архитектура
Математика и архитектура Инструкция по определению числовых характеристик выборки
Инструкция по определению числовых характеристик выборки Числа и цифры 8, 9. Письмо цифры 8 . УМК Школа России
Числа и цифры 8, 9. Письмо цифры 8 . УМК Школа России Магический квадрат. Соревнование среди учащихся 7a классa
Магический квадрат. Соревнование среди учащихся 7a классa Задания С2 на ЕГЭ. Координатный метод. Координаты многогранников
Задания С2 на ЕГЭ. Координатный метод. Координаты многогранников Кратные интегралы. (Лекция 3)
Кратные интегралы. (Лекция 3) Презентация Деление на 2 (2класс)
Презентация Деление на 2 (2класс) Элементы Комбинаторики Множество и операции над ними
Элементы Комбинаторики Множество и операции над ними