- Теория погрешностей

Содержание
- 2. Определение. Численные методы это методы решения задач, сводящиеся к арифметическим и некоторым логическим действиям над ними,
- 3. Погрешность округлений. При выполнении арифметических операций над числами, при вводе и выводе данных производится округление. Погрешность
- 4. 2. Погрешность численного решения задачи Введем некоторые переменные. x* − точное значение вычисляемого параметра;
- 5. Чтобы численный метод считался удачно выбранным, необходимо выполнение некоторых условий: А также должно выполняться условие: ρ0
- 6. Определение. Число а называется приближенным значением по недостатку, если оно меньше истинного значения, и по избытку,
- 7. Определение. Значащую цифру называют верной, если абсолютная погрешность числа не превосходит единицы разряда, соответствующего этой цифре:
- 8. А = 3,1415926 − округляют до двух знаков после запятой: а = 3,14. Δ a =
- 9. Следовательно, приближенное значение числа А в пункте b) является более точным. При сложении и вычитании приближенных
- 10. РЕШЕНИЕ НЕЛИНЕЙНОГО УРАВНЕНИЯ 1. Общая постановка задачи Пусть дано уравнение f(x) = 0, где f(x) −
- 11. б) Если уравнение задано в виде g(x) = h(x) (или g(x) − h(x) = 0) Введем
- 12. II. Определение отрезка. На выбранном отрезке [a, b] находится один корень уравнения f(x) = 0.
- 13. 2. МЕТОДЫ РЕШЕНИЯ УРАВНЕНИЙ С ОДНОЙ ПЕРЕМЕННОЙ Рассмотрим несколько методов решения уравнений с одной переменной. а)
- 14. Будем называть отрезок [a, b] промежутком существования корня, а точку с − пробной точкой. Обозначим a
- 15. Таким образом из этих двух отрезков выбирают тот, на концах которого функция имеет значения разных знаков.
- 16. В качестве приближенного значения корня берем середину отрезка [an, bn] x* − точное значение корня cn
- 17. б) метод касательных (метод Ньютона) Пусть действительный корень уравнения f(x) = 0 изолирован на отрезке [a,
- 18. Рассмотрим случай, когда f′(x) и f′′(x) имеют одинаковые знаки. Пусть у = f(x). Напишем уравнение касательной
- 19. Подставим точку М1(x1, 0) в уравнение касательной: 0 = f(x0) + f′(x0)(x1 – x0) f′(x0)(x1 –
- 20. 0 = f(x1) + f ′(x1)(x2 – x1) f ′(x1)(x2 – x1) = – f(x1) Полученная
- 21. Правила выбора исходной точки x0: За исходную точку х0 следует выбирать тот конец отрезка [a, b],
- 22. так как x* – точное значение корня уравнения f(x) = 0, то f(x*) = 0 ⇒
- 23. в) метод хорд Метод заключается в том, что дуга графика функции f(x) = 0 на отрезке
- 25. Напишем общее уравнение прямой, проходящей через две точки М1(x1, y1) и М2(x2, y2): (М1М2): Используя это
- 26. Проведем хорду через точки А(х1, f(х1)) и B(b, f(b)): возьмем точку пересечения хорды с осью (ох)
- 27. II случай: f ′(x) и f ″(x) имеют разные знаки. A
- 28. , у = 0, x = x1 , отсюда , или Проведем хорду через точки А(a,
- 29. Полученная таким образом последовательность x0, x1, x2, … имеет своим пределом искомый корень. Вывод: В качестве
- 30. г) комбинированное применение методов хорд и касательных Необходимо найти действительный корень уравнения f(x) = 0, изолированный
- 31. Величины x11 и x12 принадлежат промежутку изоляции, причем f(x11) и f(x12) имеют разные знаки. Построим новую
- 32. Каждая из последовательностей x11, x21, x31, …, xn1, … и x12, x22, x32, …, xn2, …
- 33. ТЕМА 3. РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ §1. Постановка задачи Рассмотрим систему из n линейных уравнений с
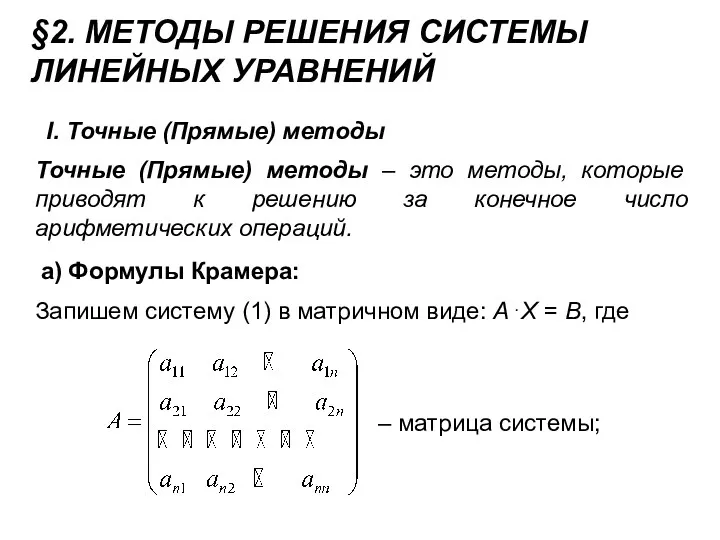
- 34. §2. МЕТОДЫ РЕШЕНИЯ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ I. Точные (Прямые) методы Точные (Прямые) методы – это методы,
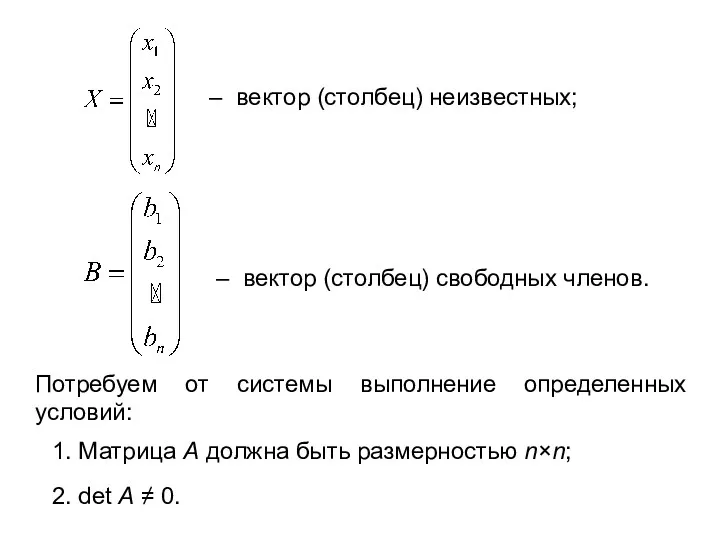
- 35. – вектор (столбец) неизвестных; – вектор (столбец) свободных членов. Потребуем от системы выполнение определенных условий: 1.
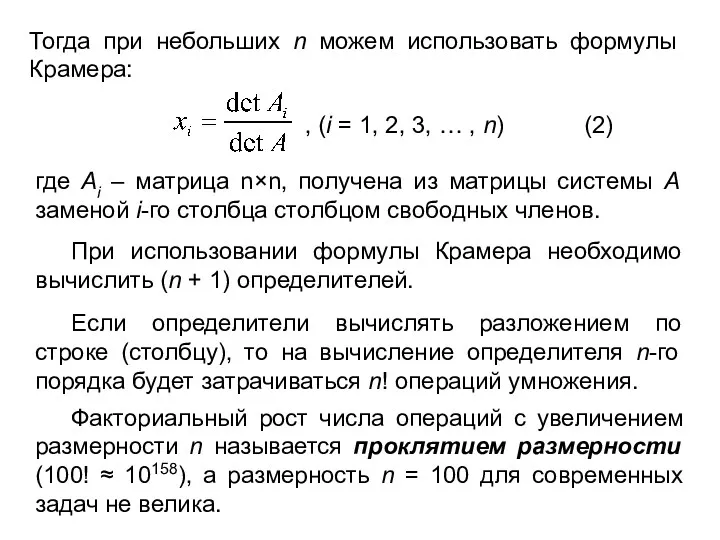
- 36. Тогда при небольших n можем использовать формулы Крамера: , (i = 1, 2, 3, … ,
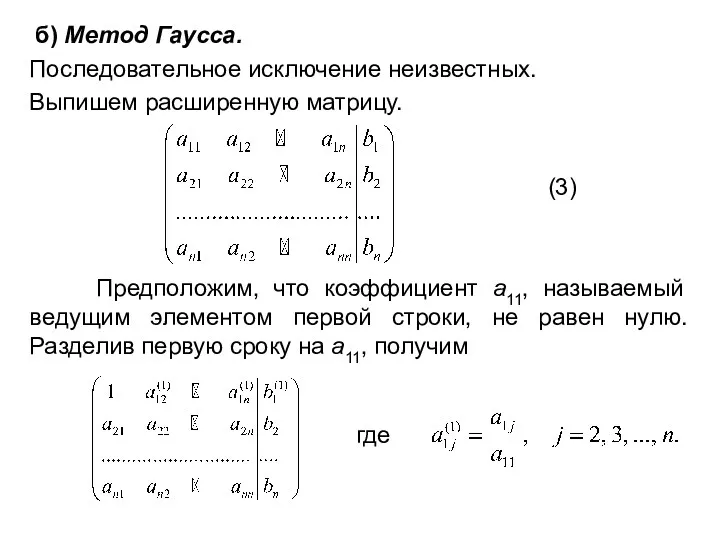
- 37. б) Метод Гаусса. Последовательное исключение неизвестных. Выпишем расширенную матрицу. (3) Предположим, что коэффициент a11, называемый ведущим
- 38. ~ С помощью первой строки получаем в первом столбце, начиная со второй строки, нули. Для этого,
- 39. ~ ~ С помощью второй строки получаем во втором столбце ниже единицы все нули. Получаем ~
- 40. (4) Переход от расширенной матрицы к матрице (4) называется прямой ход метода Гаусса (получение треугольной матрицы).
- 41. Получим Это преобразование называется – обратный ход метода Гаусса (переход от треугольной матрицы к единичной). (5)
- 42. в) Метод Гаусса с выбором главного элемента Рассмотренный выше простейший вариант метода Гаусса, называемый схемой единственного
- 43. Затем во втором столбце среди элементов, начиная со второго, выбираем наибольший по модулю элемент и строку,
- 44. ε1 = |a11 x10 + a12 x20 + … + a1n xn0 – b1| По малости
- 45. II. Итерационные методы Итерационные методы – это методы, в которых точное решение может быть получено лишь
- 46. Обозначим (6) Система (6) приведена к нормальному виду. Запишем ее в матричном виде: X = β
- 47. х0 = β – нулевое приближение. Общая формула имеет вид: Будем решать систему (6) методом последовательных
- 48. Если последовательность приближений имеет предел, то – точное решение системы (6) следовательно, системы (1). Теорема 2.
- 49. – k-ое приближенное значение неизвестных, вычисленных по методу итераций. Тогда | xi(k+1) – xi(k) | Оценка
- 50. Пример. Показать, что для данной системы итерационный процесс сходится и определить, сколько итераций следует выполнить, чтобы
- 51. ||β|| = 0,41, (k + 1) lg 0,55 + lg 0,41 – lg 0,45 (k +
- 52. б) метод Зейделя. Пусть дана система линейных уравнений Ax = b, (7) Если i-ое уравнение системы
- 53. Метод Зейделя состоит в том, что итерации производятся по формуле (9) Итерации (9) по методу Зейделя
- 54. Сформулируем теорему о двух различных достаточных условиях сходимости метода Зейделя. Теорема 3. Для существования единственного решения
- 55. ТЕМА 4. ЧИСЛЕННАЯ ИНТЕРПОЛЯЦИЯ §1. Интерполяционные многочлены Пусть в точках x0, x1, …, xn заданы значения
- 56. Часто для решения этой задачи строится алгебраический многочлен Ln(x) степени n, значения которого в точках xi
- 57. Например, если fi = 0, i = 0, 1, …, n, то интерполяционный многочлен Ln(x) ≡
- 58. §2. ИНТЕРПОЛЯЦИОННЫЙ МНОГОЧЛЕН ЛАГРАНЖА Терема 1. Существует единственный интерполяционный многочлен n-ой степени, удовлетворяющий условиям (1). Доказательство.
- 59. и, наконец, в общем случае при любом натуральном n (5) где (6) (i = 0, 1,
- 60. Аналогично, формула (4) задает некоторый многочлен L2(x) второй степени, удовлетворяющий при n = 2 условиям (1).
- 61. Докажем единственность интерполяционного многочлена. (7) Тогда согласно (1) и (7) (8)
- 62. Теорема 1 полностью доказана. Интерполяционный многочлен, представленный в виде (5), называется интерполяционным многочленом Лагранжа, а функции
- 63. §3. ПОГРЕШНОСТЬ ИНТЕРПОЛЯЦИИ Запишем равенство f(x) = Ln(x) + Rn(x), где Rn(x) – остаточный член, т.е.
- 64. (11) где и оценка максимальной погрешности интерполяции на всем отрезке [a, b]: (12)
- 65. §4. Интерполяционный многочлен Ньютона Предположим, что узлы интерполяции отстоят друг от друга на одинаковом расстоянии x0,
- 66. Определение. Пусть xk = x0 + k⋅h, где k – целое, h > 0, fk =
- 67. Конечные разности функции f удобно записывать в таблице x0 x1 x2 x3 x4 f0 f1 f2
- 68. Пусть x0, x1 = x0 + h, x2 = x0 + 2h, … xk = x0
- 69. Pn(x2) = a0+ a1(x2 – x0) + a2(x2 – x0)(x2 – x1) = y2 2h2 a2
- 70. Pn(x3) = a0+ a1(x3 – x0) + a2(x3 – x0)(x3 – x1) + + a3(x3 –
- 71. Таким образом, формула Ньютона для интерполирования вперед имеет вид (2)
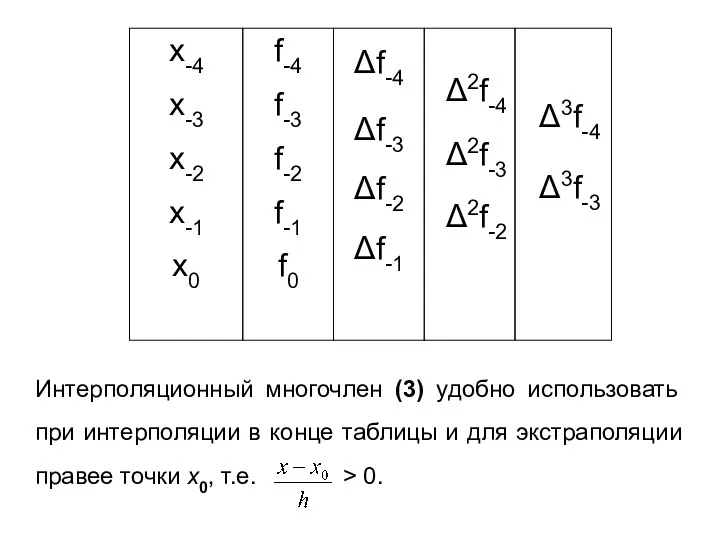
- 72. §5. ИНТЕРПОЛИРОВАНИЕ НАЗАД Интерполяционный многочлен с узлами x0, x –1 , …, x –n, где x
- 73. x-4 x-3 x-2 x-1 x0 f-4 f-3 f-2 f-1 f0 Δf-4 Δf-3 Δf-2 Δf-1 Δ2f-4 Δ2f-3
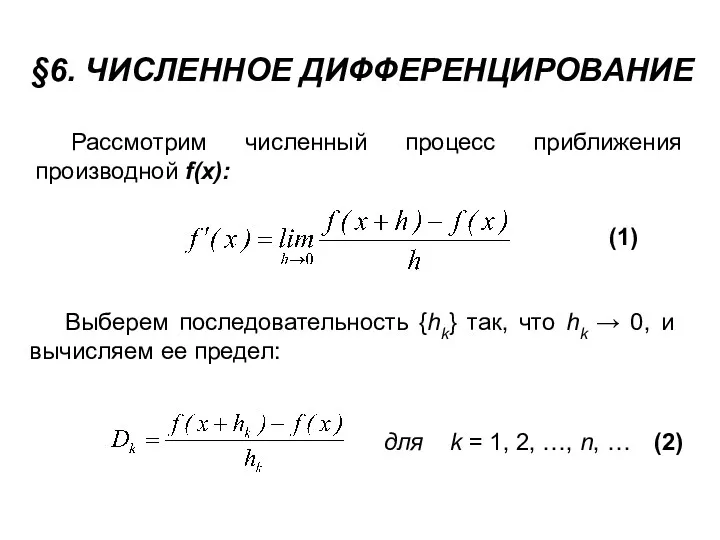
- 74. §6. ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ Рассмотрим численный процесс приближения производной f(x): (1) Выберем последовательность {hk} так, что hk
- 75. Будем вычислять только конечное количество членов D1, D2, …, Dn последовательности (2). Следовательно, для ответа следует
- 76. Нужно произвести вычисления при h = 0,00001, чтобы получить приемлемый численный ответ, и для этого значения
- 77. ТЕМА 5. ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ §1. Приближенные методы вычислений определенных интегралов Однако, вычисление по этой формуле не
- 78. Основная идея: Заменить подынтегральную функцию f(x) на многочлен, совпадающий с этой функцией в узлах интерполяции.
- 79. f(x) заменим многочленом нулевого порядка y = f(0): f(x) заменим многочленом первого порядка, который совпадает с
- 80. f(x) заменим многочленом второго порядка, который совпадает с функцией f(x) в точках –с, 0 и с.
- 81. Метод прямоугольников Формулы прямоугольников имеют вид: или
- 82. Однако для удобства вычислений поступают следующим образом: Точку x1 выбирают таким образом, чтобы она являлась серединой
- 83. Оценка погрешности формулы прямоугольников:
- 84. Метод трапеций
- 85. Вывод: – формула трапеций. Оценка погрешности формулы трапеций.
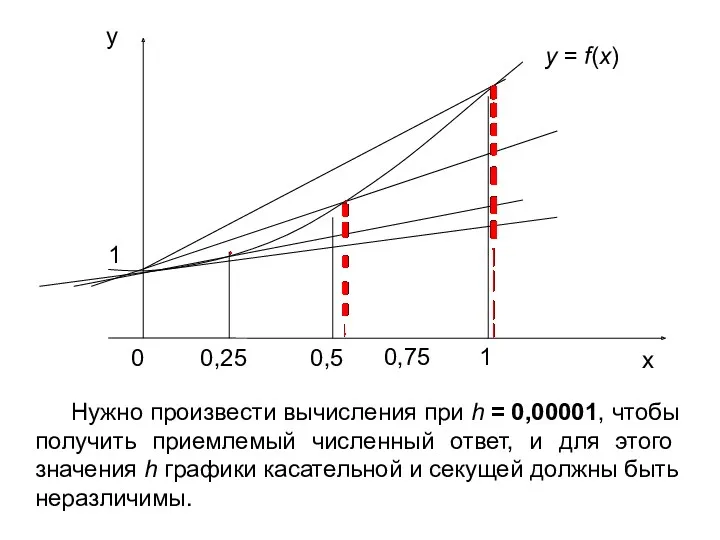
- 86. 3) Метод парабол (Симпсона). Отрезок интегрирования [a, b] разобьем на 2n равных частей: a = x0
- 88. тогда на промежутке [x0, x2] имеем:
- 90. Вывод: Оценка погрешности формулы парабол: где
- 91. §2. Формулы Ньютона-Котеса Делим отрезок [a, b] на n равных частей. – квадратурная формула Ньютона-Котеса, –
- 92. Эти формулы определяют семейство квадратурных формул. Параметром этого семейства является число n – степень интерполяционного многочлена,
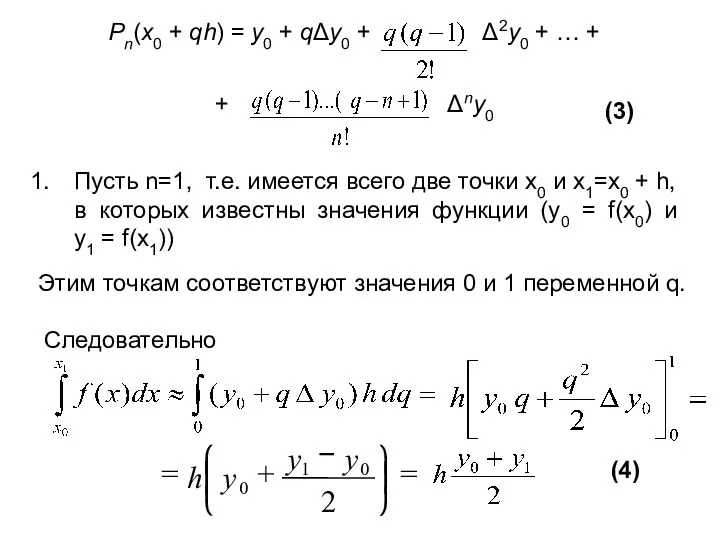
- 93. Пусть n=1, т.е. имеется всего две точки x0 и x1=x0 + h, в которых известны значения
- 94. Получена простейшая квадратурная формула трапеций, к которой можно прийти и из геометрических соображений: Остаточный член этой
- 95. Положим в (3) n = 2, т.е. проинтерполируем функцию f(x) по трем точкам: x0, x1 =
- 96. Предполагая теперь n = k, мы придем к частным формулам Ньютона-Котеса: (6)
- 97. Параметры некоторых частных формул Ньютона-Котеса вида (8)
- 98. §3. КВАДРАТУРНАЯ ФОРМУЛА ГАУССА Общий вид линейной квадратурной формулы – это (8) где фиксированные аргументы xi
- 99. Все рассмотренные выше квадратурные формулы характерны тем, что узла в них брались равноотстоящими с шагом h,
- 100. Далее откажемся от равномерного распределения узлов xi на промежутке интегрирования [a, b]. В таком случае целесообразно
- 101. т.е. строить квадратурные формулы вида (10) от которых на основе (9) легко перейти к квадратурным формулам
- 103. Скачать презентацию
Определение. Численные методы это методы решения задач, сводящиеся к арифметическим
Определение. Численные методы это методы решения задач, сводящиеся к арифметическим
Погрешность округлений. При выполнении арифметических операций над числами, при вводе
Погрешность округлений. При выполнении арифметических операций над числами, при вводе

2. Погрешность численного решения задачи
Введем некоторые переменные.
x* − точное значение вычисляемого
2. Погрешность численного решения задачи
Введем некоторые переменные.
x* − точное значение вычисляемого
Чтобы численный метод считался удачно выбранным, необходимо выполнение некоторых условий:
Чтобы численный метод считался удачно выбранным, необходимо выполнение некоторых условий:
Определение. Число а называется приближенным значением по недостатку, если оно
Определение. Число а называется приближенным значением по недостатку, если оно
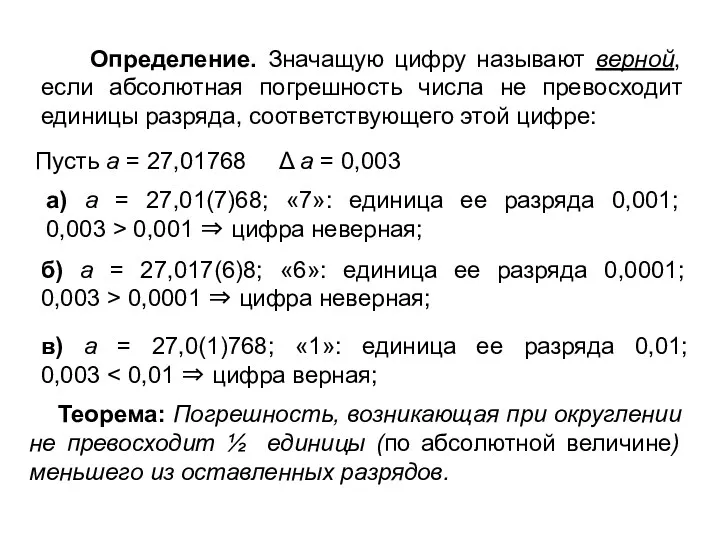
Определение. Значащую цифру называют верной, если абсолютная погрешность числа не
Определение. Значащую цифру называют верной, если абсолютная погрешность числа не
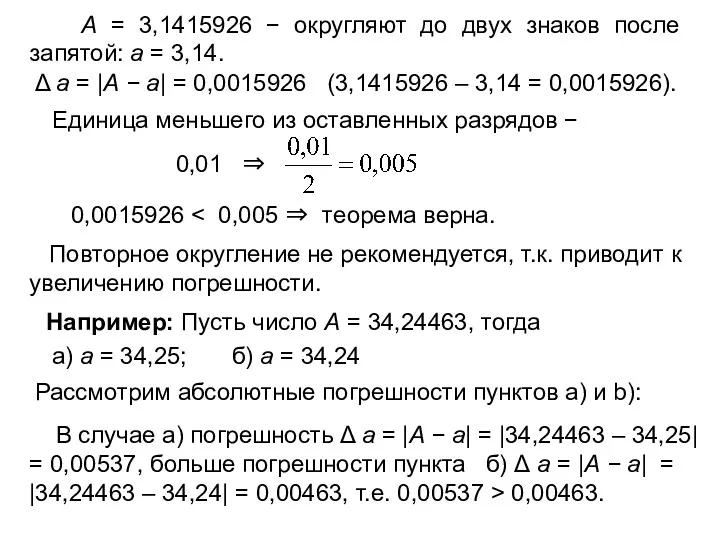
А = 3,1415926 − округляют до двух знаков после запятой:
А = 3,1415926 − округляют до двух знаков после запятой:
Следовательно, приближенное значение числа А в пункте b) является более
Следовательно, приближенное значение числа А в пункте b) является более
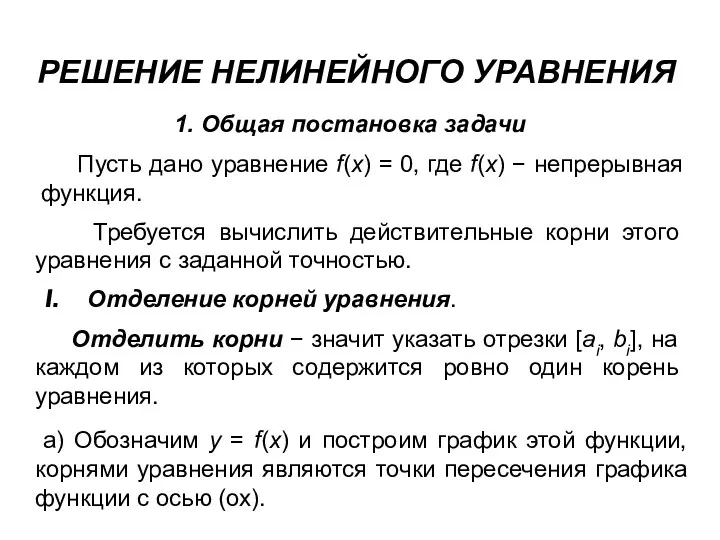
РЕШЕНИЕ НЕЛИНЕЙНОГО УРАВНЕНИЯ
1. Общая постановка задачи
Пусть дано уравнение f(x) =
РЕШЕНИЕ НЕЛИНЕЙНОГО УРАВНЕНИЯ
1. Общая постановка задачи
Пусть дано уравнение f(x) =
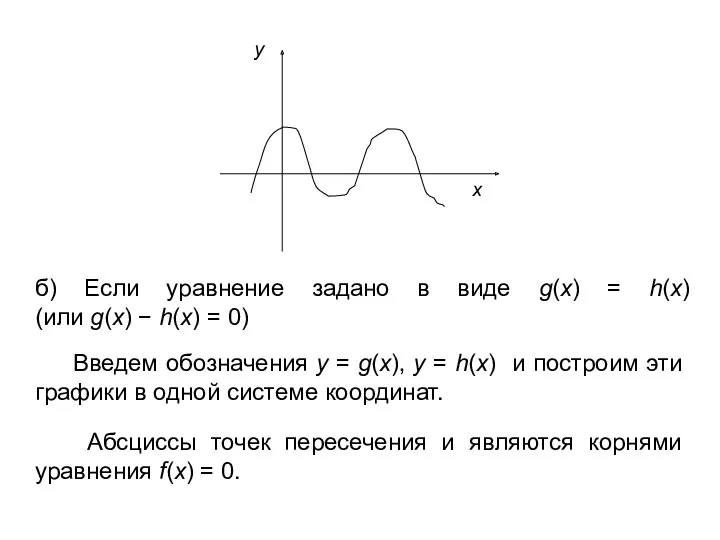
б) Если уравнение задано в виде g(x) = h(x)
(или g(x) −
б) Если уравнение задано в виде g(x) = h(x) (или g(x) −
![II. Определение отрезка. На выбранном отрезке [a, b] находится один корень уравнения f(x) = 0.](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/590577/slide-11.jpg)
II. Определение отрезка.
На выбранном отрезке [a, b] находится один
II. Определение отрезка.
На выбранном отрезке [a, b] находится один
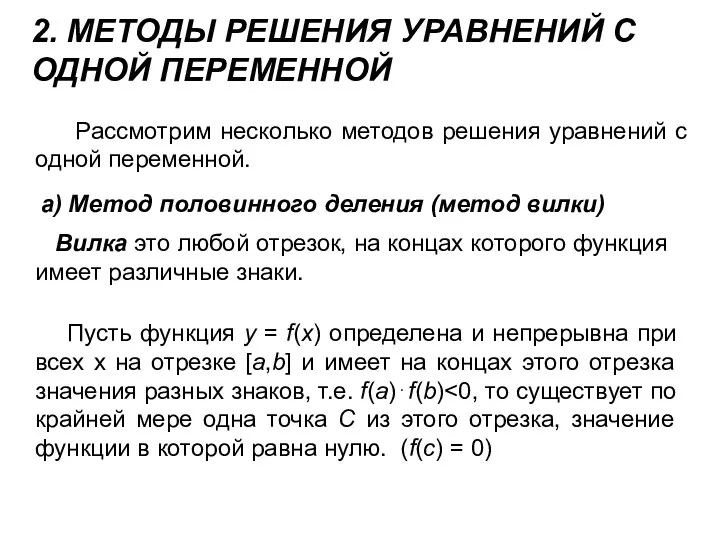
2. МЕТОДЫ РЕШЕНИЯ УРАВНЕНИЙ С ОДНОЙ ПЕРЕМЕННОЙ
Рассмотрим несколько методов решения
2. МЕТОДЫ РЕШЕНИЯ УРАВНЕНИЙ С ОДНОЙ ПЕРЕМЕННОЙ
Рассмотрим несколько методов решения
![Будем называть отрезок [a, b] промежутком существования корня, а точку](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/590577/slide-13.jpg)
Будем называть отрезок [a, b] промежутком существования корня, а точку
Будем называть отрезок [a, b] промежутком существования корня, а точку
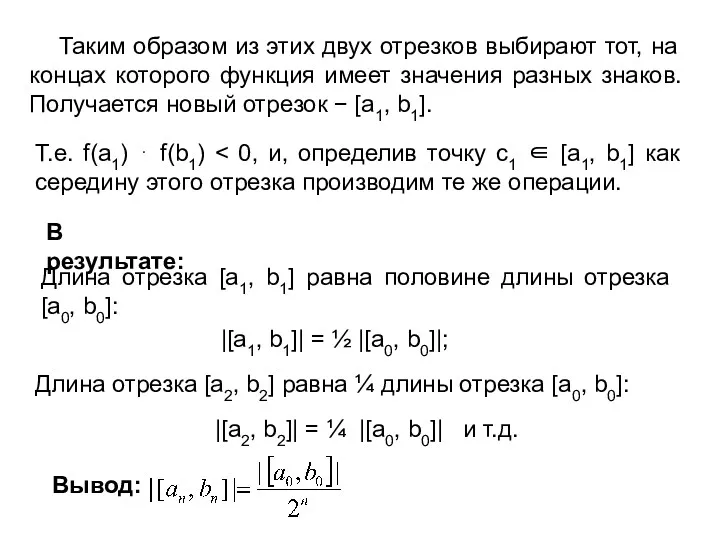
Таким образом из этих двух отрезков выбирают тот, на концах
Таким образом из этих двух отрезков выбирают тот, на концах
![В качестве приближенного значения корня берем середину отрезка [an, bn]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/590577/slide-15.jpg)
В качестве приближенного значения корня берем середину отрезка [an, bn]
x*
В качестве приближенного значения корня берем середину отрезка [an, bn]
x*
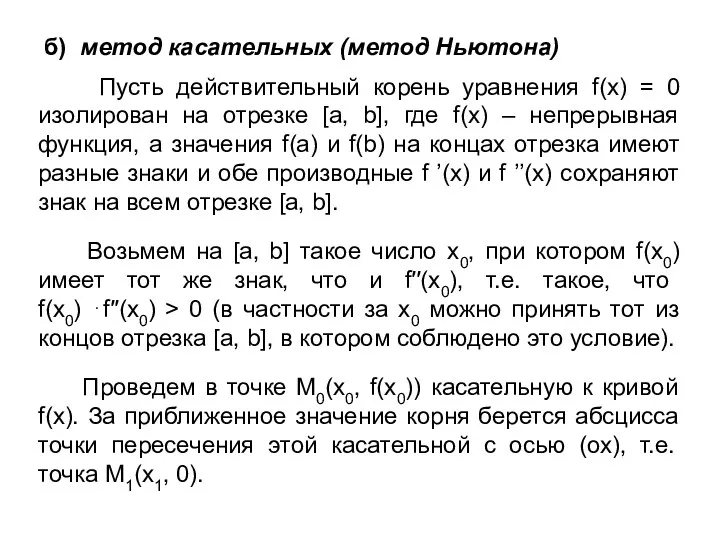
б) метод касательных (метод Ньютона)
Пусть действительный корень уравнения f(x)
б) метод касательных (метод Ньютона)
Пусть действительный корень уравнения f(x)
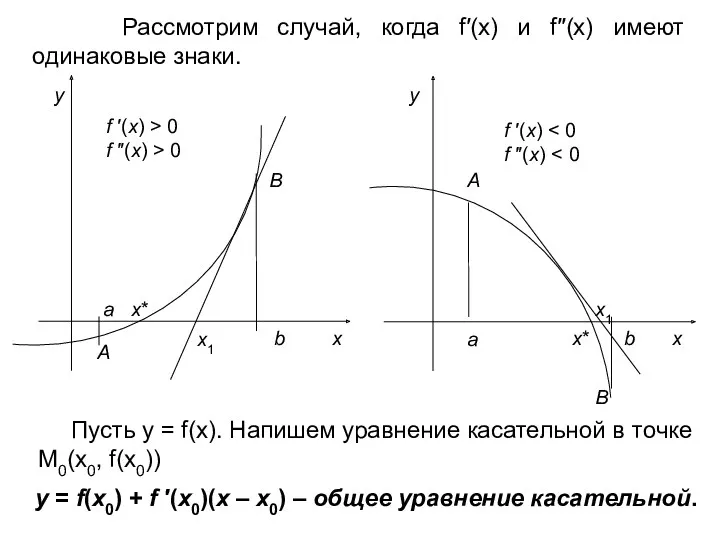
Рассмотрим случай, когда f′(x) и f′′(x) имеют одинаковые знаки.
Рассмотрим случай, когда f′(x) и f′′(x) имеют одинаковые знаки.
Подставим точку М1(x1, 0) в уравнение касательной:
0 = f(x0) +
Подставим точку М1(x1, 0) в уравнение касательной:
0 = f(x0) +
0 = f(x1) + f ′(x1)(x2 – x1)
f ′(x1)(x2 –
0 = f(x1) + f ′(x1)(x2 – x1)
f ′(x1)(x2 –
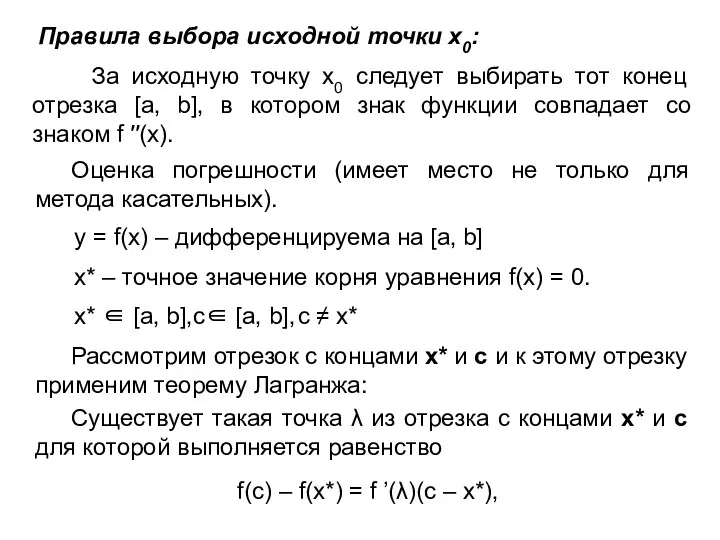
Правила выбора исходной точки x0:
За исходную точку х0 следует
Правила выбора исходной точки x0:
За исходную точку х0 следует
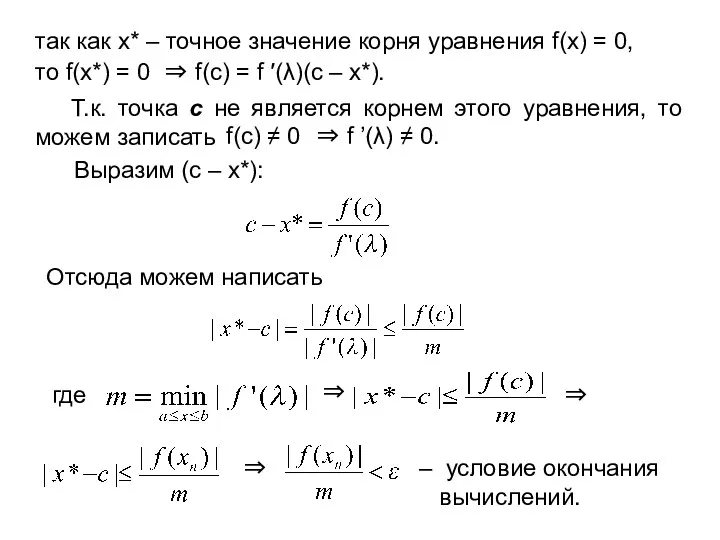
так как x* – точное значение корня уравнения f(x) = 0,
так как x* – точное значение корня уравнения f(x) = 0,
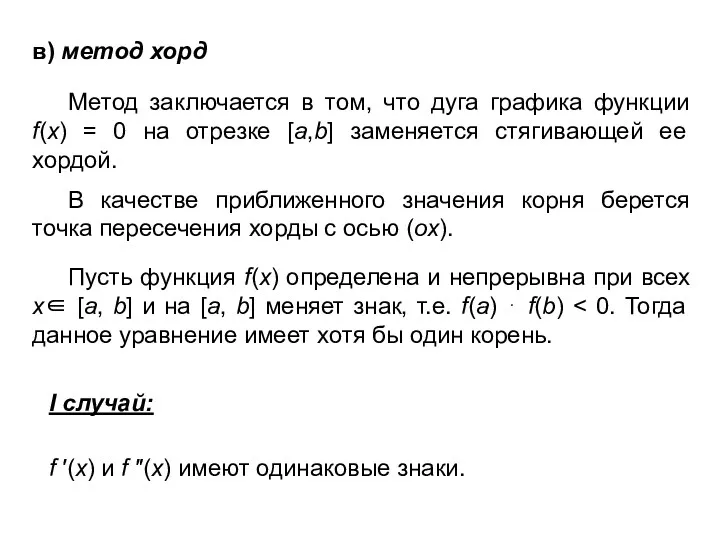
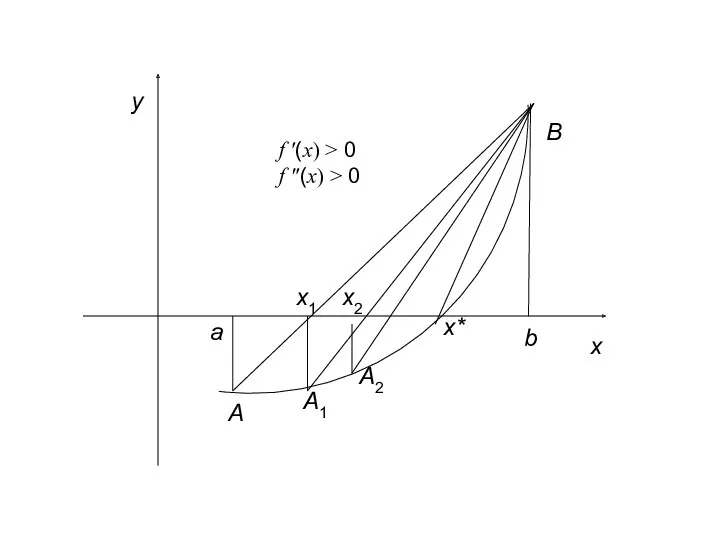
в) метод хорд
Метод заключается в том, что дуга графика функции f(x)
в) метод хорд
Метод заключается в том, что дуга графика функции f(x)
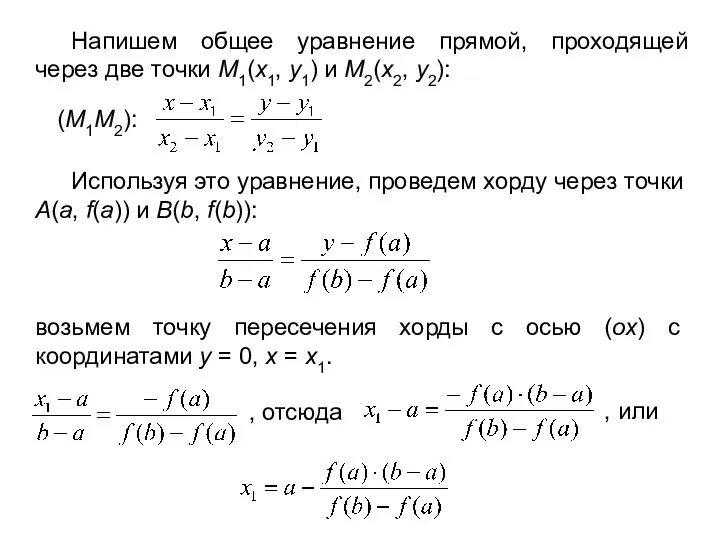
Напишем общее уравнение прямой, проходящей через две точки М1(x1, y1) и
Напишем общее уравнение прямой, проходящей через две точки М1(x1, y1) и
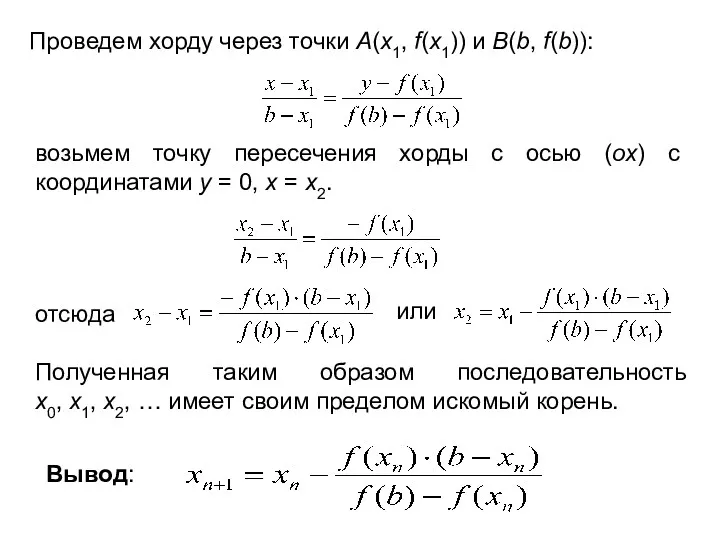
Проведем хорду через точки А(х1, f(х1)) и B(b, f(b)):
возьмем точку пересечения
Проведем хорду через точки А(х1, f(х1)) и B(b, f(b)):
возьмем точку пересечения
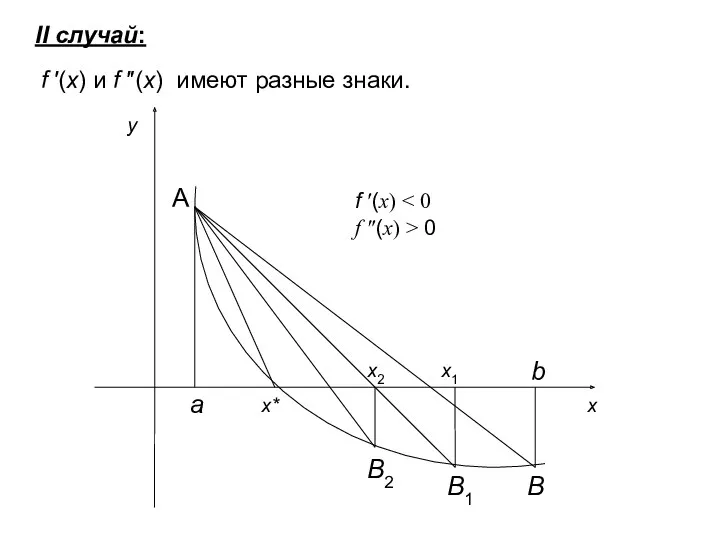
II случай:
f ′(x) и f ″(x) имеют разные знаки.
A
II случай:
f ′(x) и f ″(x) имеют разные знаки.
A
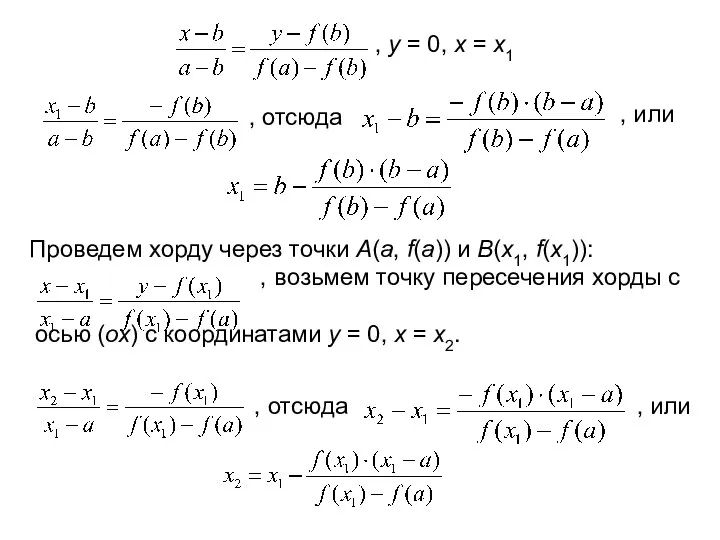
, у = 0, x = x1
, отсюда
, или
Проведем хорду
, у = 0, x = x1
, отсюда
, или
Проведем хорду
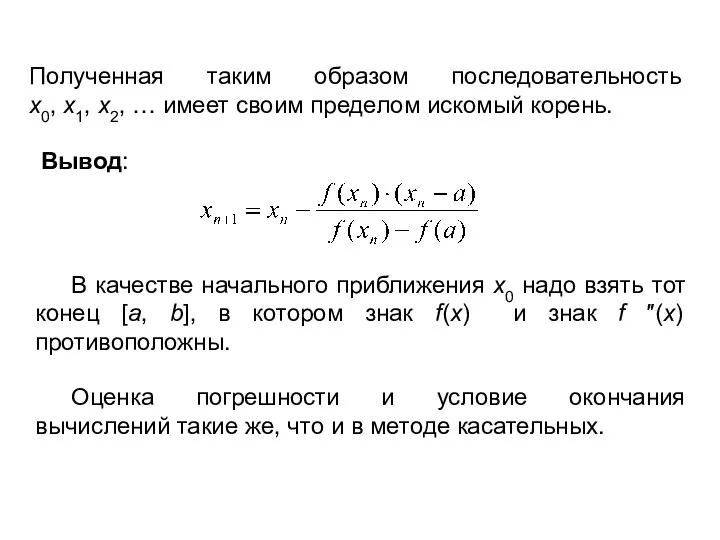
Полученная таким образом последовательность
x0, x1, x2, … имеет своим пределом
Полученная таким образом последовательность x0, x1, x2, … имеет своим пределом
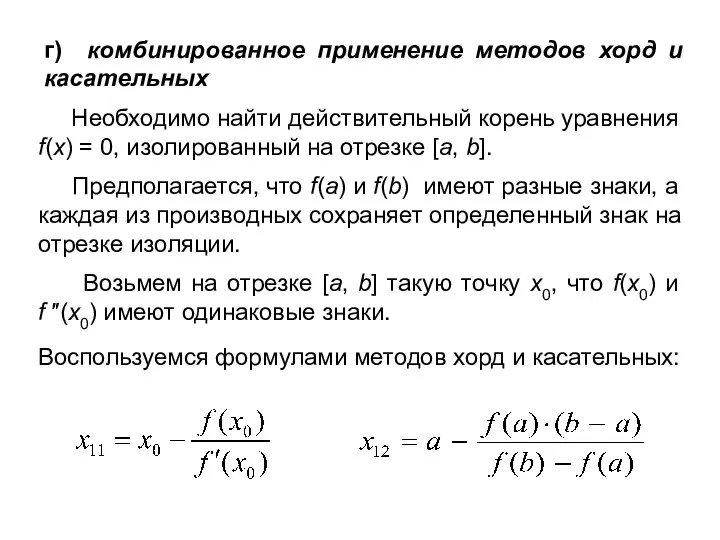
г) комбинированное применение методов хорд и касательных
Необходимо найти действительный
г) комбинированное применение методов хорд и касательных
Необходимо найти действительный
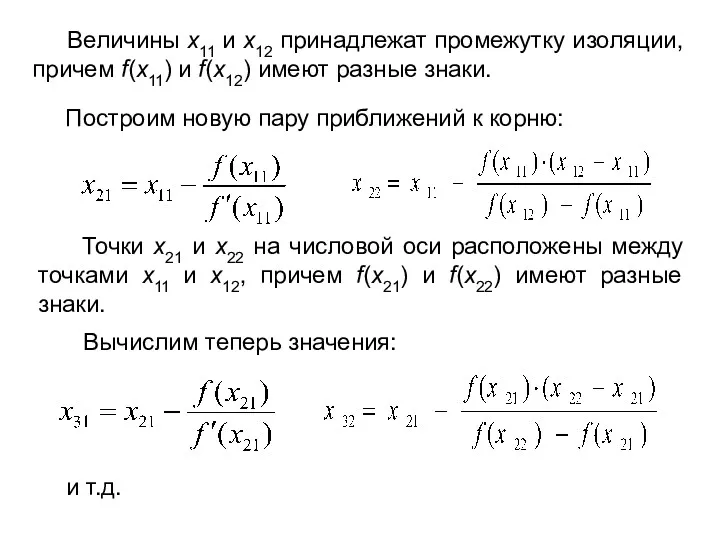
Величины x11 и x12 принадлежат промежутку изоляции, причем f(x11) и
Величины x11 и x12 принадлежат промежутку изоляции, причем f(x11) и
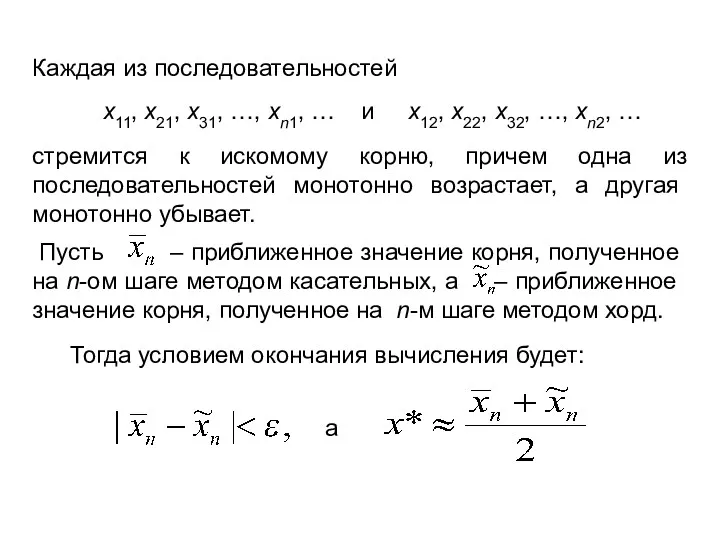
Каждая из последовательностей
x11, x21, x31, …, xn1, … и x12,
Каждая из последовательностей
x11, x21, x31, …, xn1, … и x12,
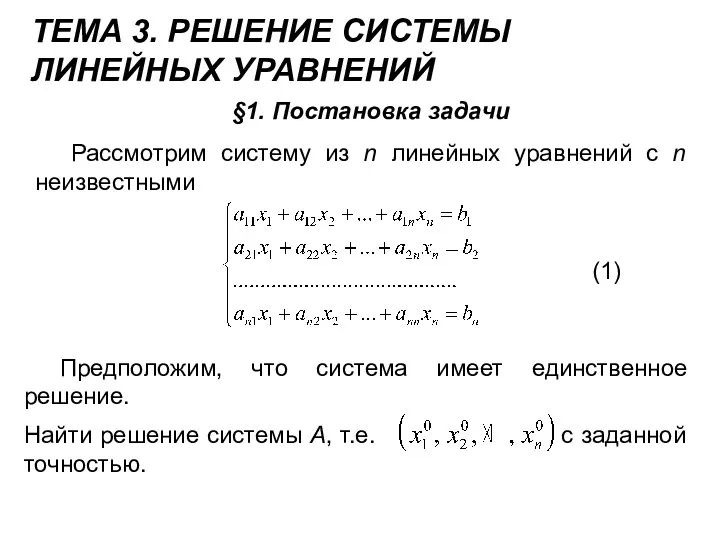
ТЕМА 3. РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
§1. Постановка задачи
Рассмотрим систему из n
ТЕМА 3. РЕШЕНИЕ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
§1. Постановка задачи
Рассмотрим систему из n
§2. МЕТОДЫ РЕШЕНИЯ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
I. Точные (Прямые) методы
Точные (Прямые)
§2. МЕТОДЫ РЕШЕНИЯ СИСТЕМЫ ЛИНЕЙНЫХ УРАВНЕНИЙ
I. Точные (Прямые) методы
Точные (Прямые)
– вектор (столбец) неизвестных;
– вектор (столбец) свободных членов.
Потребуем от
– вектор (столбец) неизвестных;
– вектор (столбец) свободных членов.
Потребуем от
Тогда при небольших n можем использовать формулы Крамера:
, (i = 1,
Тогда при небольших n можем использовать формулы Крамера:
, (i = 1,
б) Метод Гаусса.
Последовательное исключение неизвестных.
Выпишем расширенную матрицу.
(3)
Предположим, что коэффициент a11,
б) Метод Гаусса.
Последовательное исключение неизвестных.
Выпишем расширенную матрицу.
(3)
Предположим, что коэффициент a11,
~
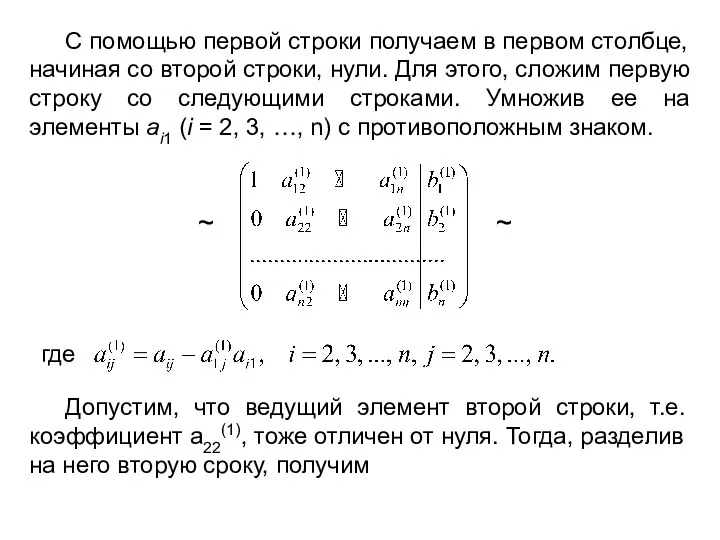
С помощью первой строки получаем в первом столбце, начиная со второй
~
С помощью первой строки получаем в первом столбце, начиная со второй
~
~
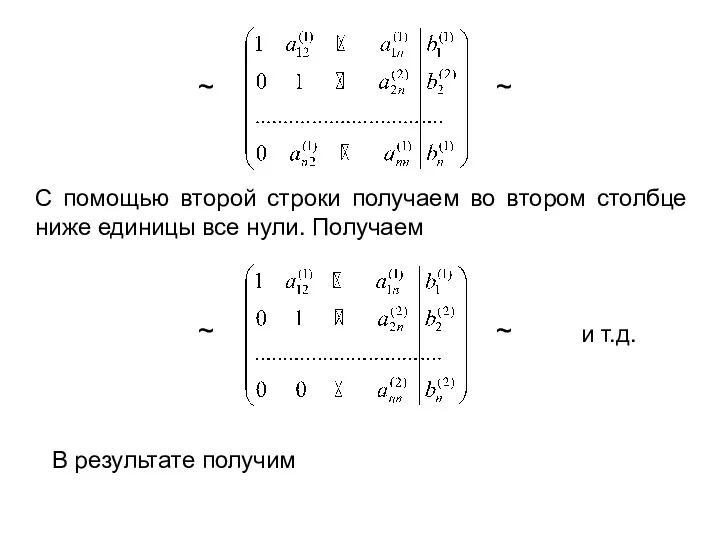
С помощью второй строки получаем во втором столбце ниже единицы все
~
~
С помощью второй строки получаем во втором столбце ниже единицы все
(4)
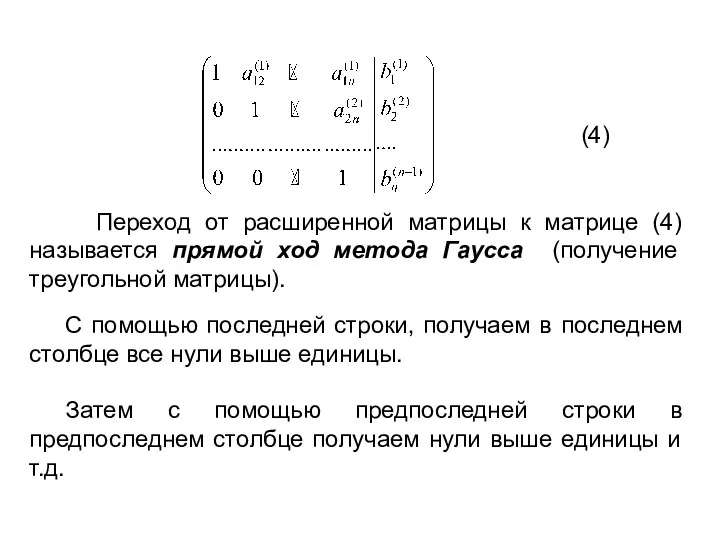
Переход от расширенной матрицы к матрице (4) называется прямой ход
(4)
Переход от расширенной матрицы к матрице (4) называется прямой ход
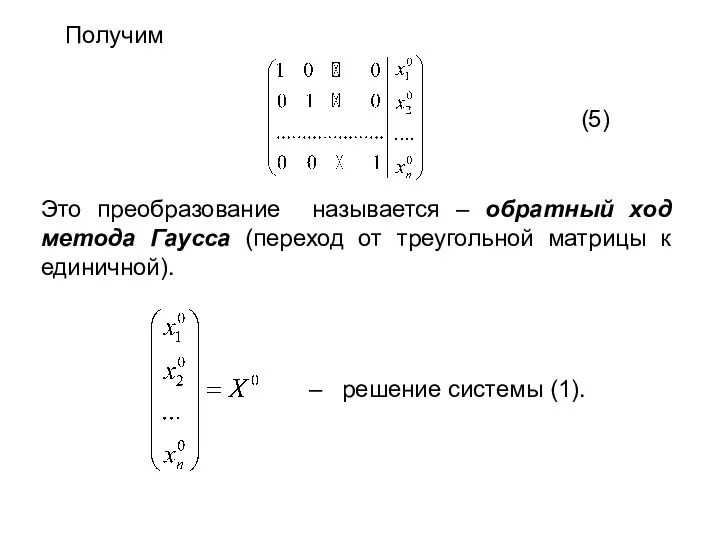
Получим
Это преобразование называется – обратный ход метода Гаусса (переход от треугольной
Получим
Это преобразование называется – обратный ход метода Гаусса (переход от треугольной
в) Метод Гаусса с выбором главного элемента
Рассмотренный выше простейший вариант
в) Метод Гаусса с выбором главного элемента
Рассмотренный выше простейший вариант
Затем во втором столбце среди элементов, начиная со второго, выбираем
Затем во втором столбце среди элементов, начиная со второго, выбираем
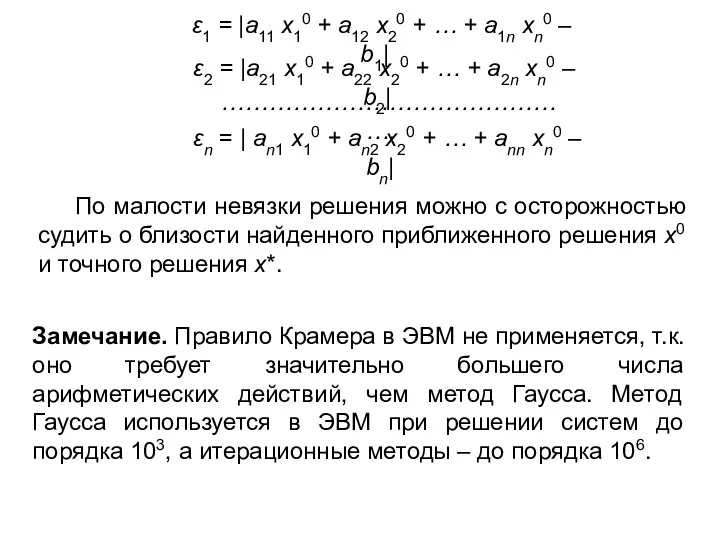
ε1 = |a11 x10 + a12 x20 + … + a1n
ε1 = |a11 x10 + a12 x20 + … + a1n
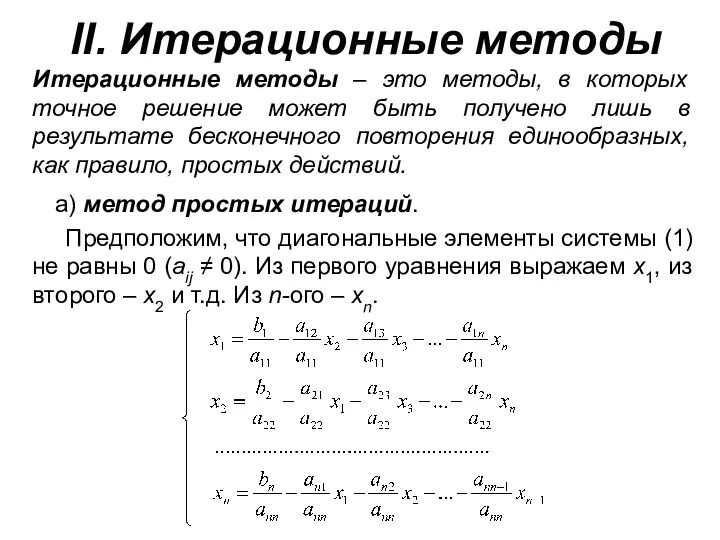
II. Итерационные методы
Итерационные методы – это методы, в которых точное
II. Итерационные методы
Итерационные методы – это методы, в которых точное

Обозначим
(6)
Система (6) приведена к нормальному виду. Запишем ее
Обозначим
(6)
Система (6) приведена к нормальному виду. Запишем ее
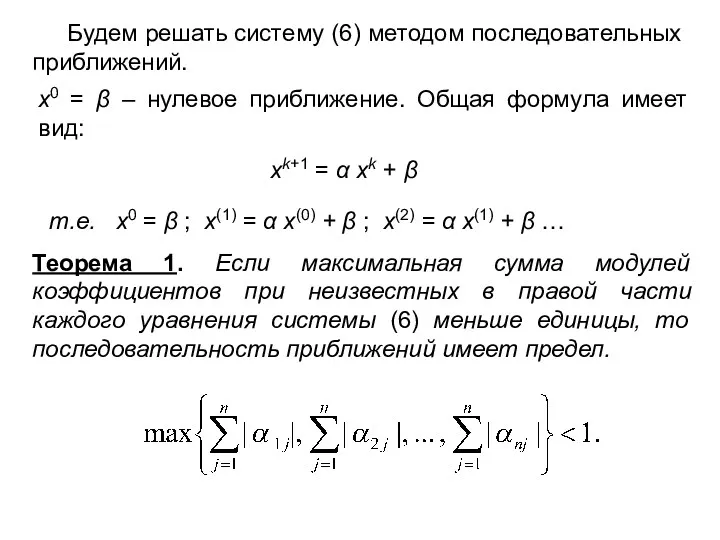
х0 = β – нулевое приближение. Общая формула имеет вид:
х0 = β – нулевое приближение. Общая формула имеет вид:
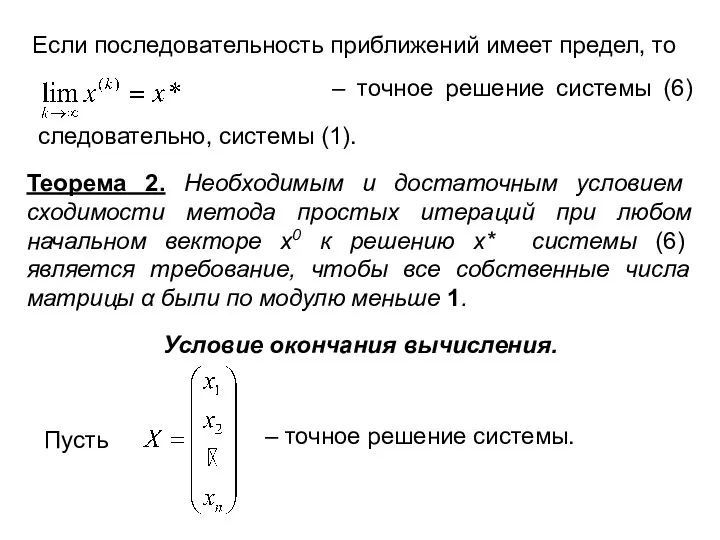
Если последовательность приближений имеет предел, то
– точное решение системы
Если последовательность приближений имеет предел, то
– точное решение системы
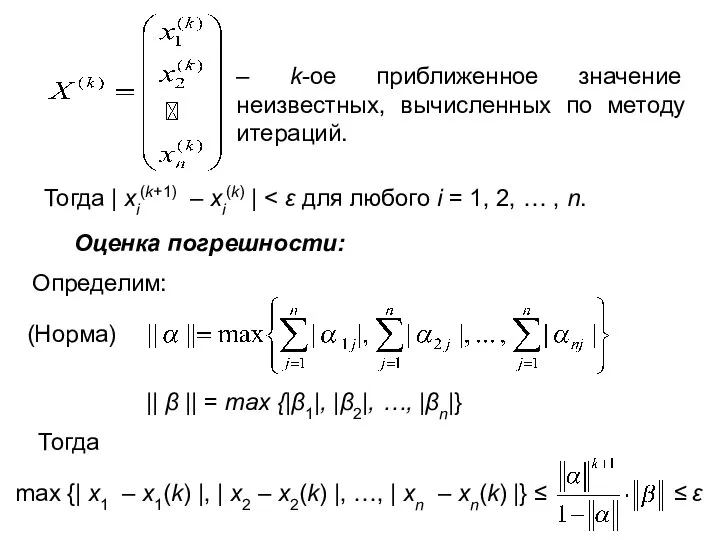
– k-ое приближенное значение неизвестных, вычисленных по методу итераций.
Тогда |
– k-ое приближенное значение неизвестных, вычисленных по методу итераций.
Тогда |
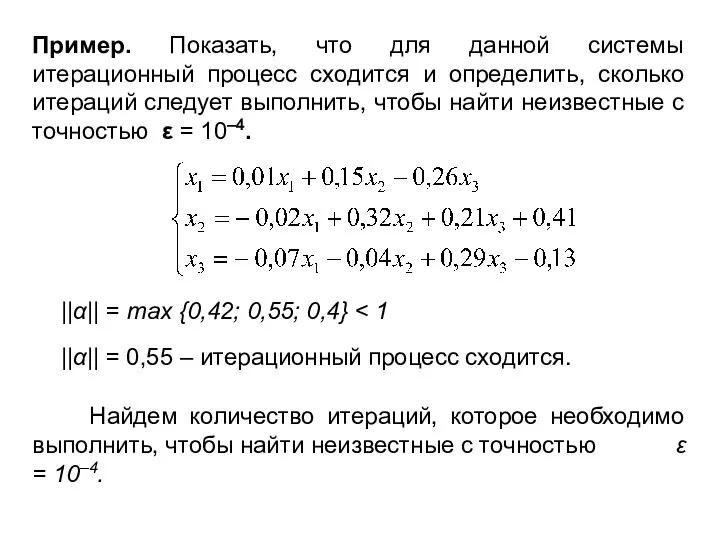
Пример. Показать, что для данной системы итерационный процесс сходится и определить,
Пример. Показать, что для данной системы итерационный процесс сходится и определить,

||β|| = 0,41,
(k + 1) lg 0,55 + lg 0,41
||β|| = 0,41,
(k + 1) lg 0,55 + lg 0,41
б) метод Зейделя.
Пусть дана система линейных уравнений
Ax = b,
(7)
Если i-ое
б) метод Зейделя.
Пусть дана система линейных уравнений
Ax = b,
(7)
Если i-ое
Метод Зейделя состоит в том, что итерации производятся по формуле
(9)
Итерации (9)
Метод Зейделя состоит в том, что итерации производятся по формуле
(9)
Итерации (9)
Сформулируем теорему о двух различных достаточных условиях сходимости метода Зейделя.
Теорема 3.
Сформулируем теорему о двух различных достаточных условиях сходимости метода Зейделя.
Теорема 3.
ТЕМА 4. ЧИСЛЕННАЯ ИНТЕРПОЛЯЦИЯ
§1. Интерполяционные многочлены
Пусть в точках x0, x1, …,
ТЕМА 4. ЧИСЛЕННАЯ ИНТЕРПОЛЯЦИЯ
§1. Интерполяционные многочлены
Пусть в точках x0, x1, …,
Часто для решения этой задачи строится алгебраический многочлен Ln(x) степени n,
Часто для решения этой задачи строится алгебраический многочлен Ln(x) степени n,
Например, если fi = 0, i = 0, 1, …, n,
Например, если fi = 0, i = 0, 1, …, n,
§2. ИНТЕРПОЛЯЦИОННЫЙ МНОГОЧЛЕН ЛАГРАНЖА
Терема 1. Существует единственный интерполяционный многочлен n-ой степени,
§2. ИНТЕРПОЛЯЦИОННЫЙ МНОГОЧЛЕН ЛАГРАНЖА
Терема 1. Существует единственный интерполяционный многочлен n-ой степени,
и, наконец, в общем случае при любом натуральном n
(5)
где
(6)
(i =
и, наконец, в общем случае при любом натуральном n
(5)
где
(6)
(i =
Аналогично, формула (4) задает некоторый многочлен L2(x) второй степени, удовлетворяющий при
Аналогично, формула (4) задает некоторый многочлен L2(x) второй степени, удовлетворяющий при
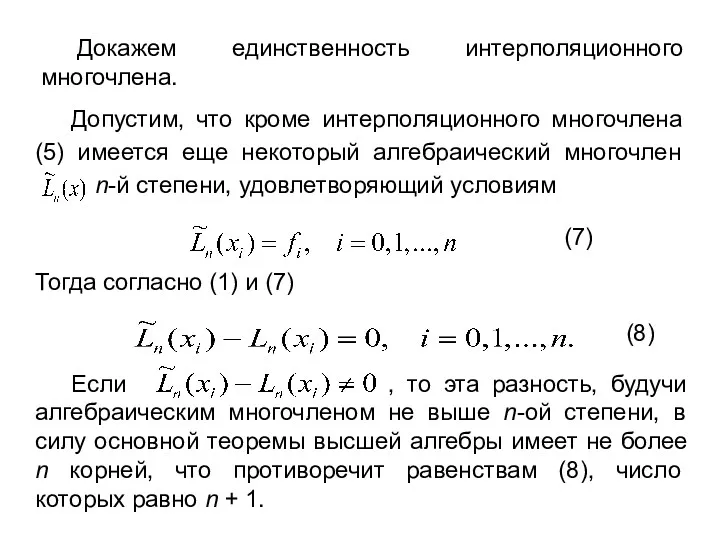
Докажем единственность интерполяционного многочлена.
(7)
Тогда согласно (1) и (7)
(8)
Докажем единственность интерполяционного многочлена.
(7)
Тогда согласно (1) и (7)
(8)
Теорема 1 полностью доказана.
Интерполяционный многочлен, представленный в виде (5), называется интерполяционным
Теорема 1 полностью доказана.
Интерполяционный многочлен, представленный в виде (5), называется интерполяционным
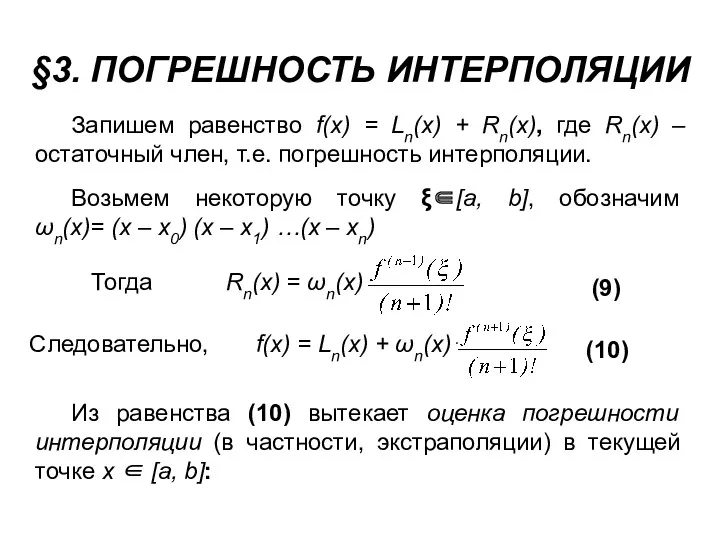
§3. ПОГРЕШНОСТЬ ИНТЕРПОЛЯЦИИ
Запишем равенство f(x) = Ln(x) + Rn(x), где Rn(x)
§3. ПОГРЕШНОСТЬ ИНТЕРПОЛЯЦИИ
Запишем равенство f(x) = Ln(x) + Rn(x), где Rn(x)
![(11) где и оценка максимальной погрешности интерполяции на всем отрезке [a, b]: (12)](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/590577/slide-63.jpg)
(11)
где
и оценка максимальной погрешности интерполяции на всем отрезке [a, b]:
(12)
(11)
где
и оценка максимальной погрешности интерполяции на всем отрезке [a, b]:
(12)
§4. Интерполяционный многочлен Ньютона
Предположим, что узлы интерполяции отстоят друг
§4. Интерполяционный многочлен Ньютона
Предположим, что узлы интерполяции отстоят друг
Определение. Пусть xk = x0 + k⋅h, где k –
Определение. Пусть xk = x0 + k⋅h, где k –
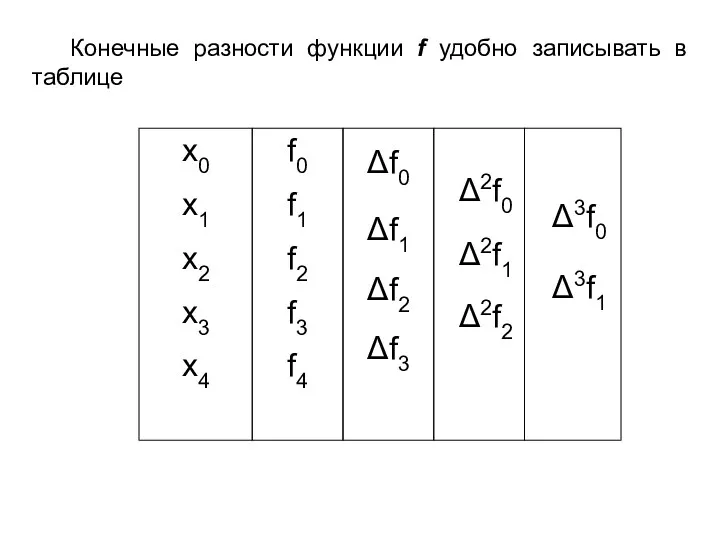
Конечные разности функции f удобно записывать в таблице
x0
x1
x2
x3
x4
f0
f1
f2
f3
f4
Δf0
Δf1
Δf2
Δf3
Δ2f0
Δ2f1
Δ2f2
Δ3f0
Δ3f1
Конечные разности функции f удобно записывать в таблице
x0
x1
x2
x3
x4
f0
f1
f2
f3
f4
Δf0
Δf1
Δf2
Δf3
Δ2f0
Δ2f1
Δ2f2
Δ3f0
Δ3f1
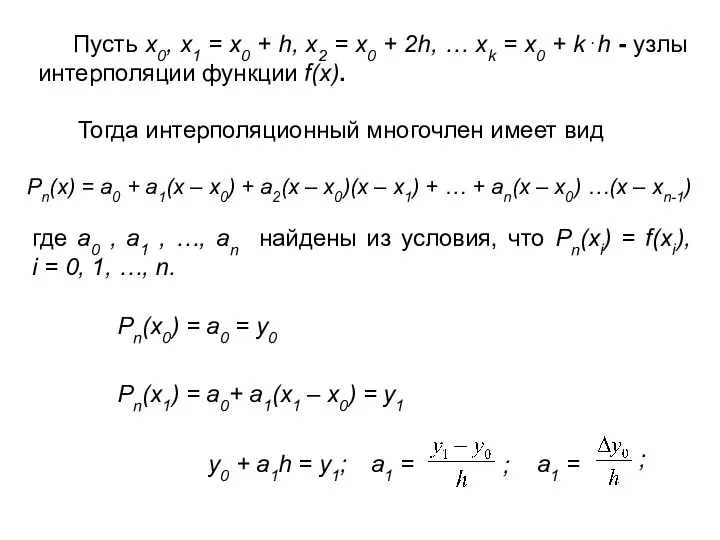
Пусть x0, x1 = x0 + h, x2 = x0
Пусть x0, x1 = x0 + h, x2 = x0
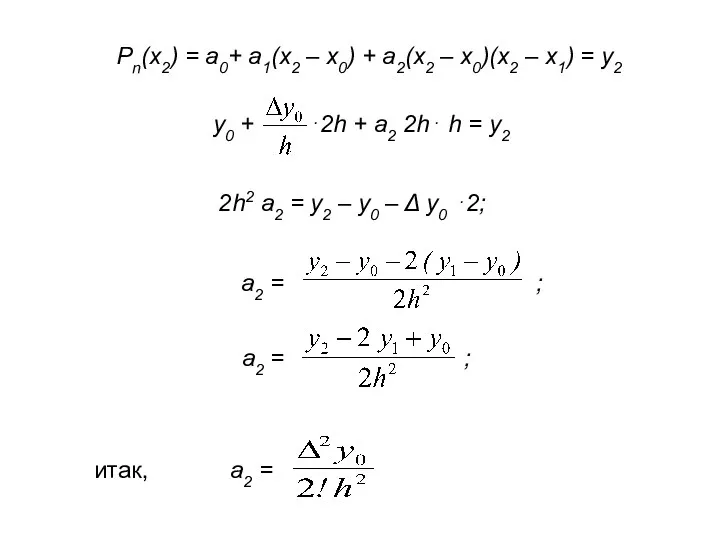
Pn(x2) = a0+ a1(x2 – x0) + a2(x2 – x0)(x2 –
Pn(x2) = a0+ a1(x2 – x0) + a2(x2 – x0)(x2 –
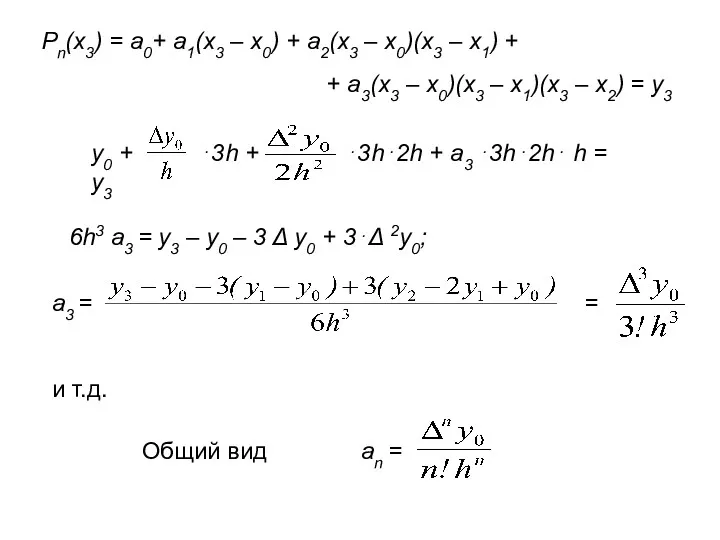
Pn(x3) = a0+ a1(x3 – x0) + a2(x3 – x0)(x3 –
Pn(x3) = a0+ a1(x3 – x0) + a2(x3 – x0)(x3 –
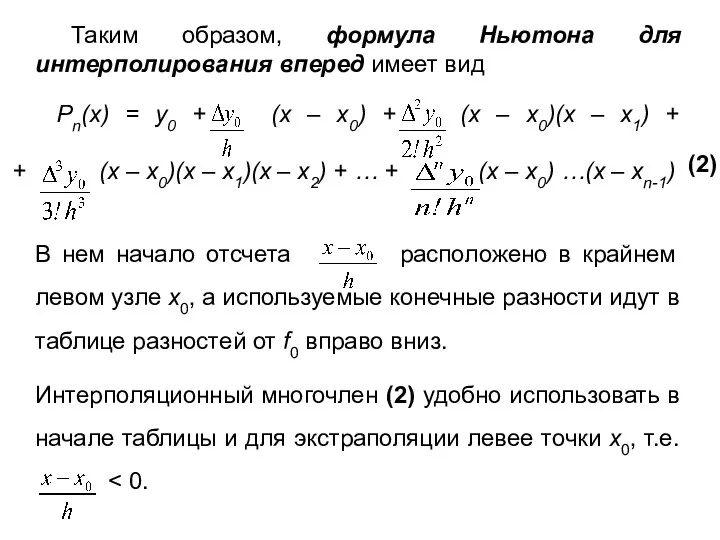
Таким образом, формула Ньютона для интерполирования вперед имеет вид
(2)
Таким образом, формула Ньютона для интерполирования вперед имеет вид
(2)
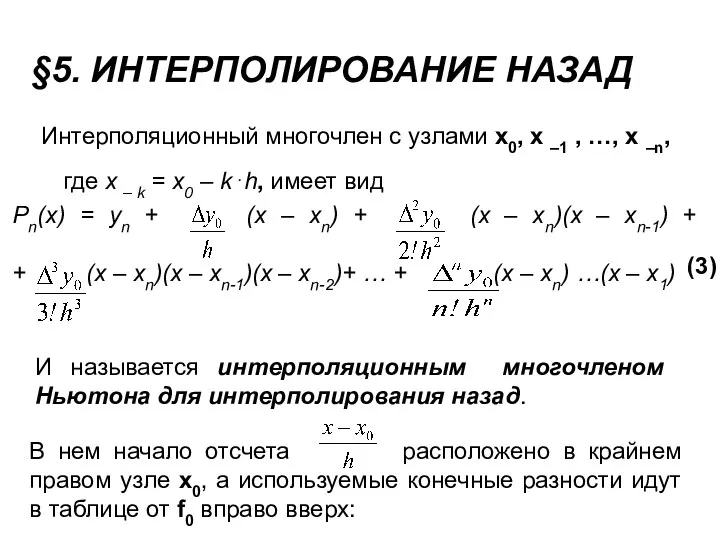
§5. ИНТЕРПОЛИРОВАНИЕ НАЗАД
Интерполяционный многочлен с узлами x0, x –1 , …,
§5. ИНТЕРПОЛИРОВАНИЕ НАЗАД
Интерполяционный многочлен с узлами x0, x –1 , …,
x-4
x-3
x-2
x-1
x0
f-4
f-3
f-2
f-1
f0
Δf-4
Δf-3
Δf-2
Δf-1
Δ2f-4
Δ2f-3
Δ2f-2
Δ3f-4
Δ3f-3
x-4
x-3
x-2
x-1
x0
f-4
f-3
f-2
f-1
f0
Δf-4
Δf-3
Δf-2
Δf-1
Δ2f-4
Δ2f-3
Δ2f-2
Δ3f-4
Δ3f-3
§6. ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ
Рассмотрим численный процесс приближения производной f(x):
(1)
Выберем последовательность {hk} так,
§6. ЧИСЛЕННОЕ ДИФФЕРЕНЦИРОВАНИЕ
Рассмотрим численный процесс приближения производной f(x):
(1)
Выберем последовательность {hk} так,
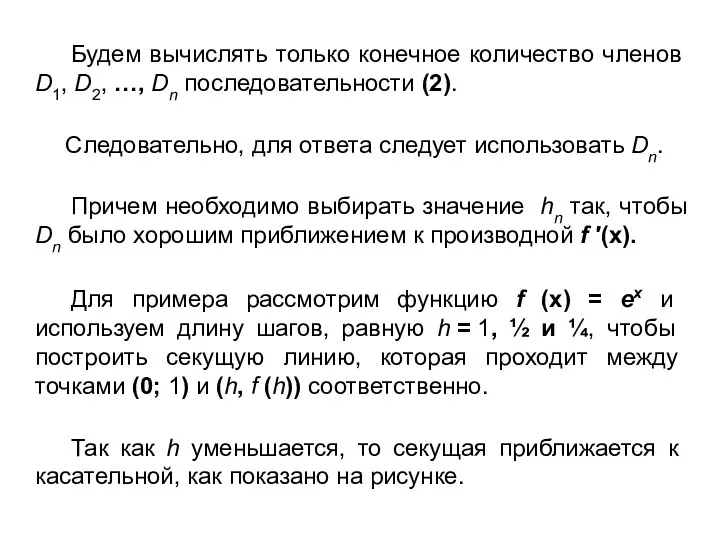
Будем вычислять только конечное количество членов D1, D2, …, Dn последовательности
Будем вычислять только конечное количество членов D1, D2, …, Dn последовательности
Нужно произвести вычисления при h = 0,00001, чтобы получить приемлемый численный ответ, и
Нужно произвести вычисления при h = 0,00001, чтобы получить приемлемый численный ответ, и
ТЕМА 5. ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ
§1. Приближенные методы вычислений определенных интегралов
Однако, вычисление по
ТЕМА 5. ЧИСЛЕННОЕ ИНТЕГРИРОВАНИЕ
§1. Приближенные методы вычислений определенных интегралов
Однако, вычисление по
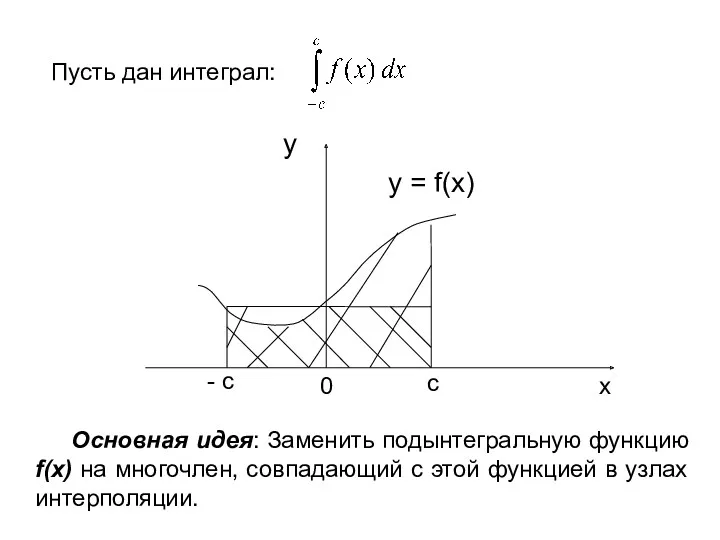
Основная идея: Заменить подынтегральную функцию f(x) на многочлен, совпадающий с этой
Основная идея: Заменить подынтегральную функцию f(x) на многочлен, совпадающий с этой
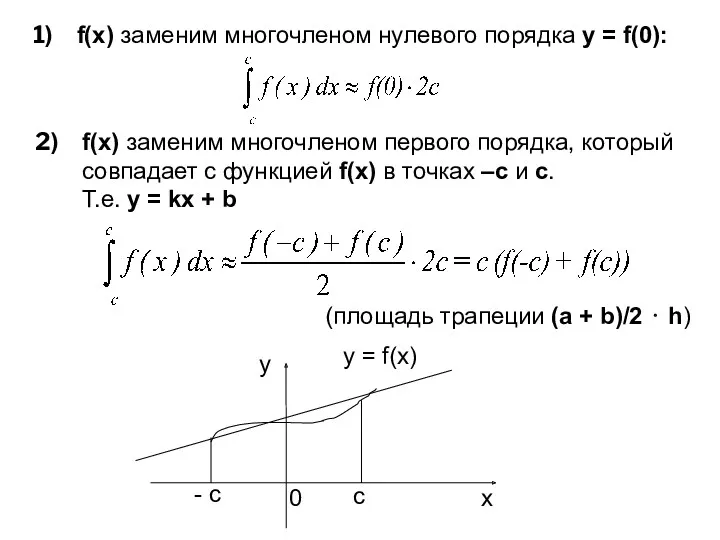
f(x) заменим многочленом нулевого порядка y = f(0):
f(x) заменим многочленом первого
f(x) заменим многочленом нулевого порядка y = f(0):
f(x) заменим многочленом первого
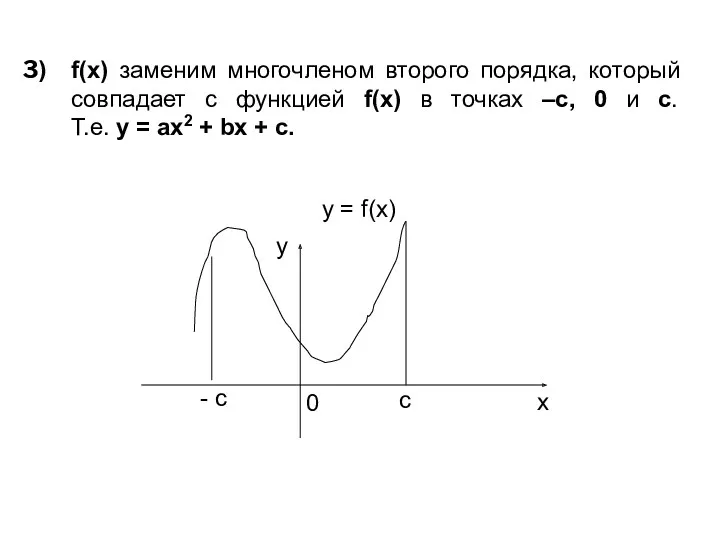
f(x) заменим многочленом второго порядка, который совпадает с функцией f(x) в
f(x) заменим многочленом второго порядка, который совпадает с функцией f(x) в
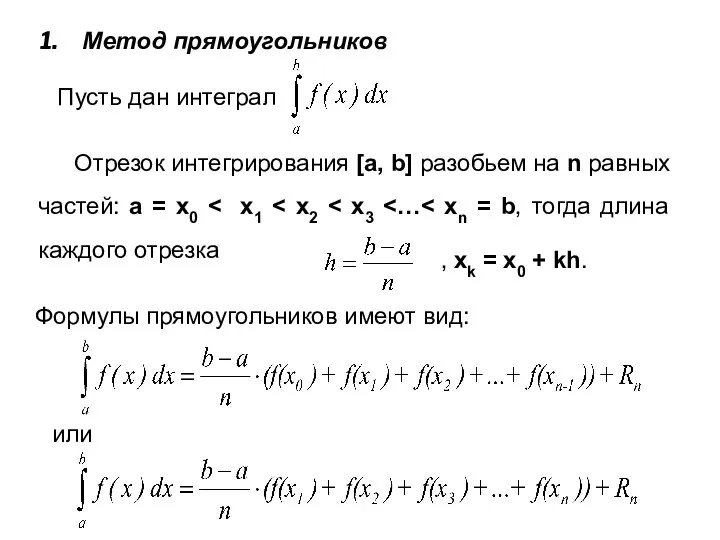
Метод прямоугольников
Формулы прямоугольников имеют вид:
или
Метод прямоугольников
Формулы прямоугольников имеют вид:
или
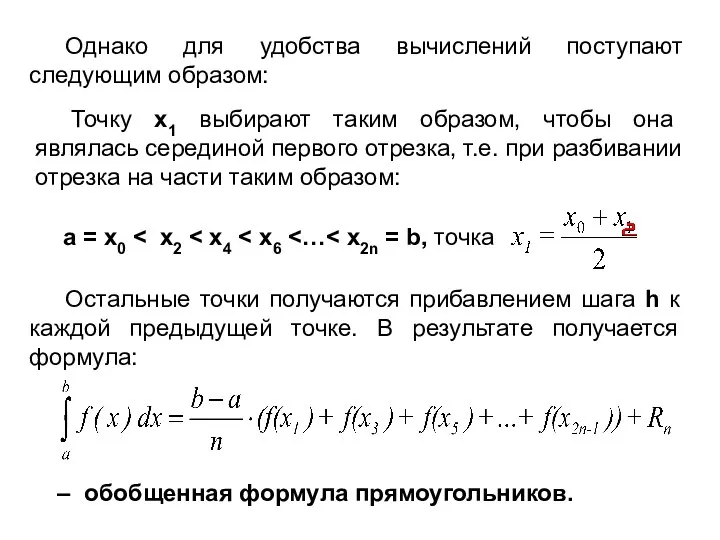
Однако для удобства вычислений поступают следующим образом:
Точку x1 выбирают таким образом,
Однако для удобства вычислений поступают следующим образом:
Точку x1 выбирают таким образом,

Оценка погрешности формулы прямоугольников:
Оценка погрешности формулы прямоугольников:
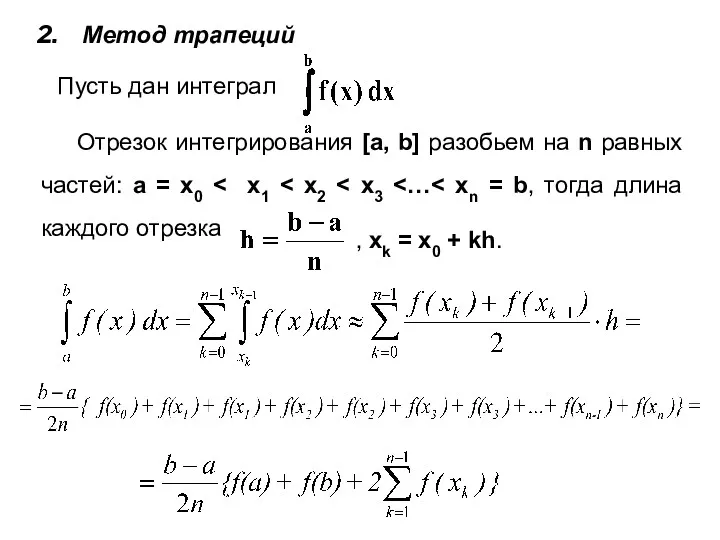
Метод трапеций
Метод трапеций
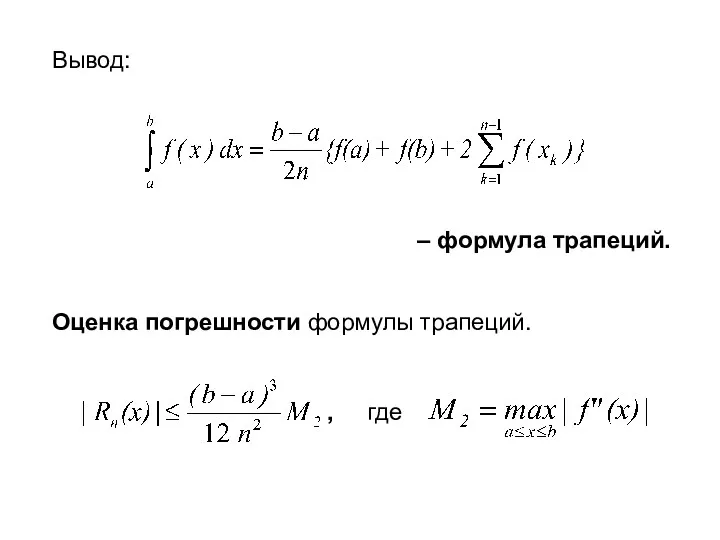
Вывод:
– формула трапеций.
Оценка погрешности формулы трапеций.
Вывод:
– формула трапеций.
Оценка погрешности формулы трапеций.
![3) Метод парабол (Симпсона). Отрезок интегрирования [a, b] разобьем на](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/590577/slide-85.jpg)
3) Метод парабол (Симпсона).
Отрезок интегрирования [a, b] разобьем на
3) Метод парабол (Симпсона).
Отрезок интегрирования [a, b] разобьем на
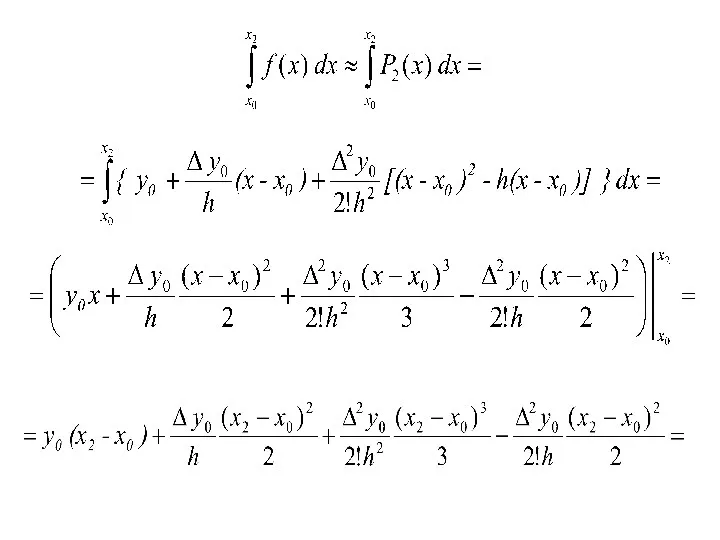
![тогда на промежутке [x0, x2] имеем:](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/590577/slide-87.jpg)
тогда на промежутке [x0, x2] имеем:
тогда на промежутке [x0, x2] имеем:
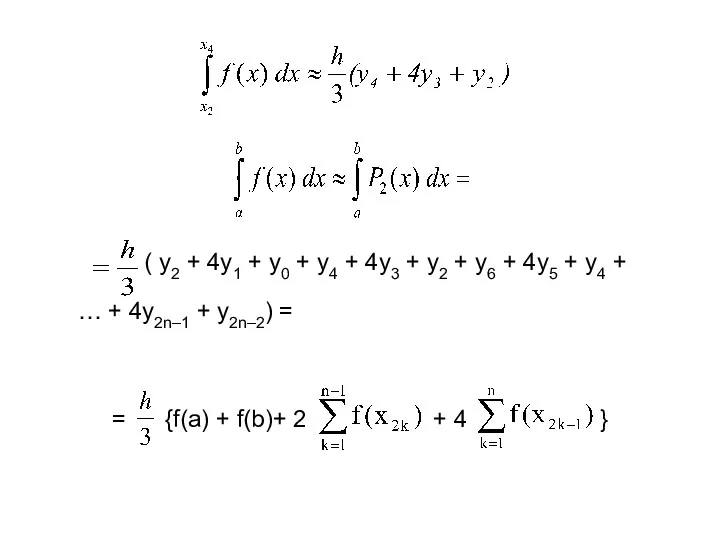
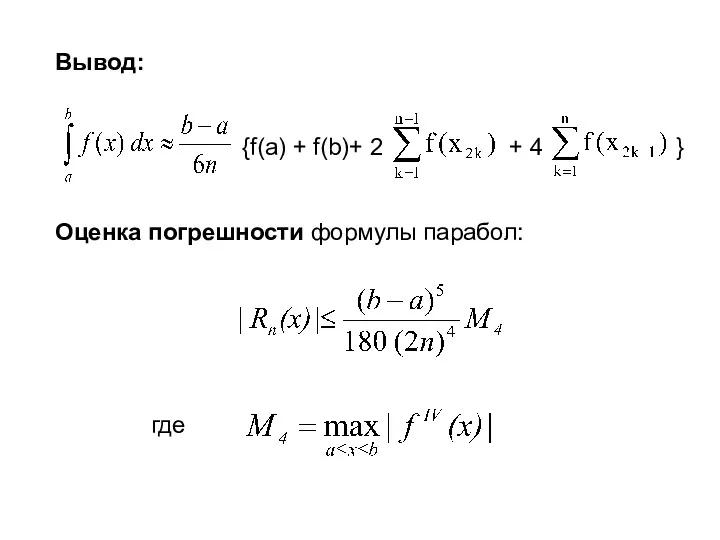
Вывод:
Оценка погрешности формулы парабол:
где
Вывод:
Оценка погрешности формулы парабол:
где
![§2. Формулы Ньютона-Котеса Делим отрезок [a, b] на n равных](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/590577/slide-90.jpg)
§2. Формулы Ньютона-Котеса
Делим отрезок [a, b] на n равных частей.
§2. Формулы Ньютона-Котеса
Делим отрезок [a, b] на n равных частей.
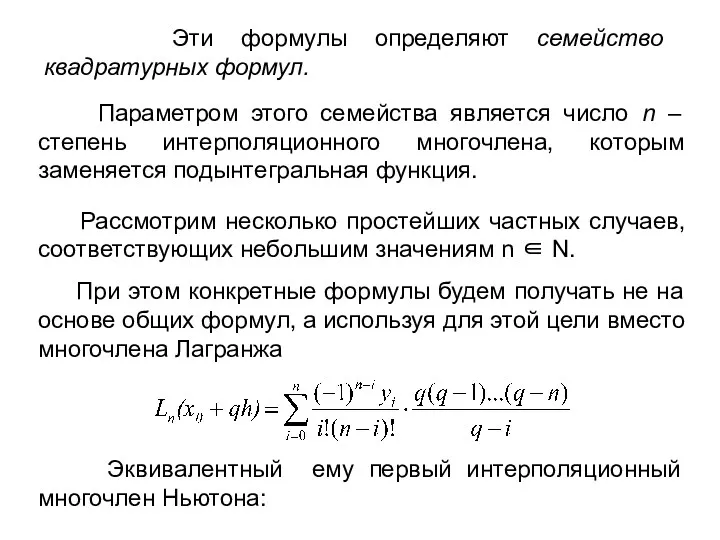
Эти формулы определяют семейство квадратурных формул.
Параметром этого семейства
Эти формулы определяют семейство квадратурных формул.
Параметром этого семейства
Пусть n=1, т.е. имеется всего две точки x0 и x1=x0 +
Пусть n=1, т.е. имеется всего две точки x0 и x1=x0 +
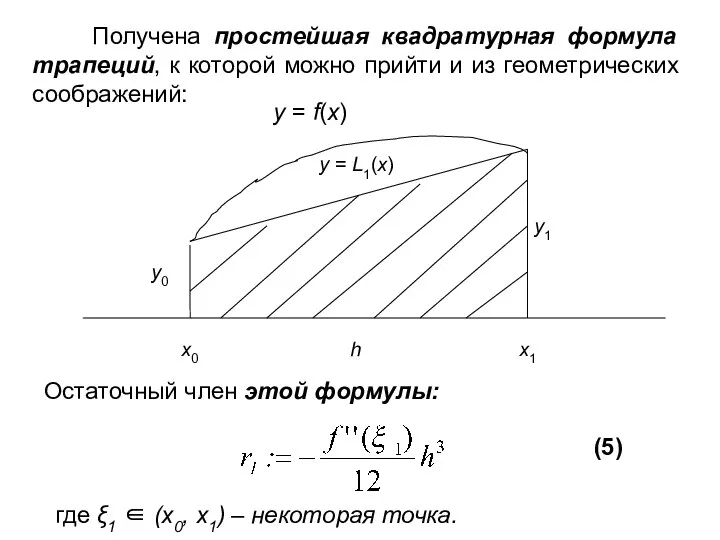
Получена простейшая квадратурная формула трапеций, к которой можно прийти и
Получена простейшая квадратурная формула трапеций, к которой можно прийти и
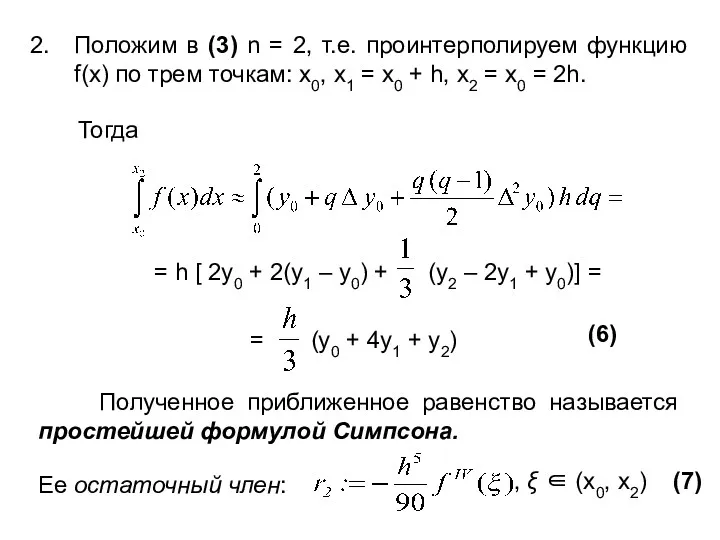
Положим в (3) n = 2, т.е. проинтерполируем функцию f(x) по
Положим в (3) n = 2, т.е. проинтерполируем функцию f(x) по
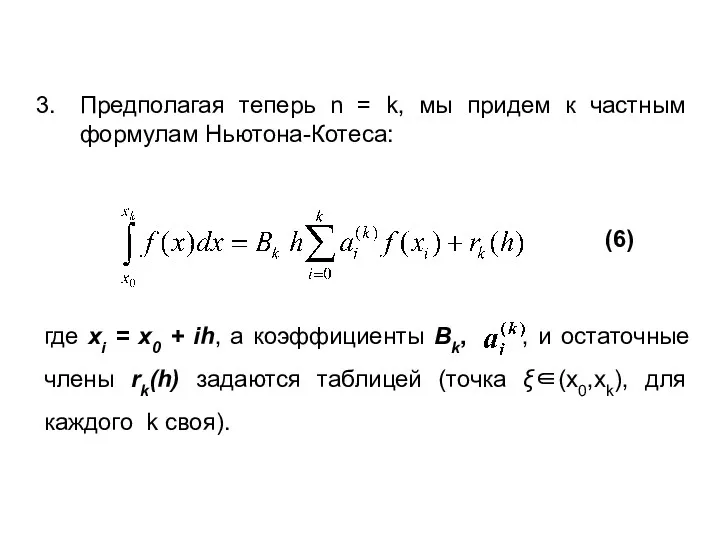
Предполагая теперь n = k, мы придем к частным формулам Ньютона-Котеса:
Предполагая теперь n = k, мы придем к частным формулам Ньютона-Котеса:

Параметры некоторых частных формул Ньютона-Котеса вида (8)
Параметры некоторых частных формул Ньютона-Котеса вида (8)
§3. КВАДРАТУРНАЯ ФОРМУЛА ГАУССА
Общий вид линейной квадратурной формулы – это
(8)
где фиксированные
§3. КВАДРАТУРНАЯ ФОРМУЛА ГАУССА
Общий вид линейной квадратурной формулы – это
(8)
где фиксированные
Все рассмотренные выше квадратурные формулы характерны тем, что узла в них
Все рассмотренные выше квадратурные формулы характерны тем, что узла в них
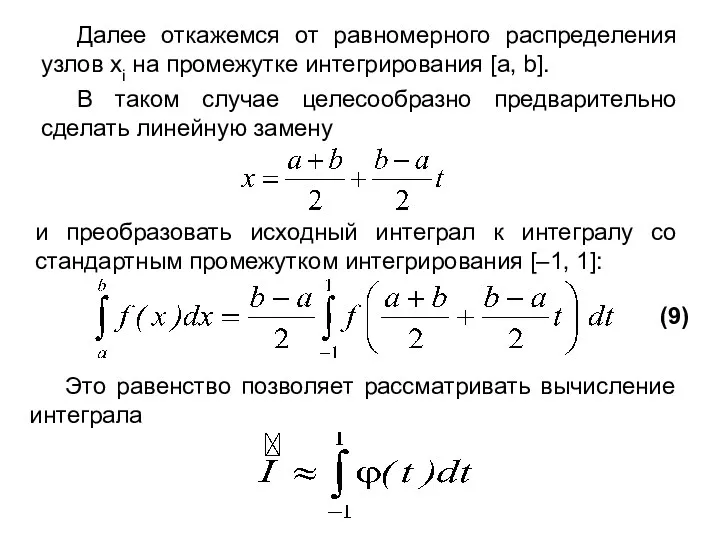
Далее откажемся от равномерного распределения узлов xi на промежутке интегрирования [a, b].
В
Далее откажемся от равномерного распределения узлов xi на промежутке интегрирования [a, b].
В
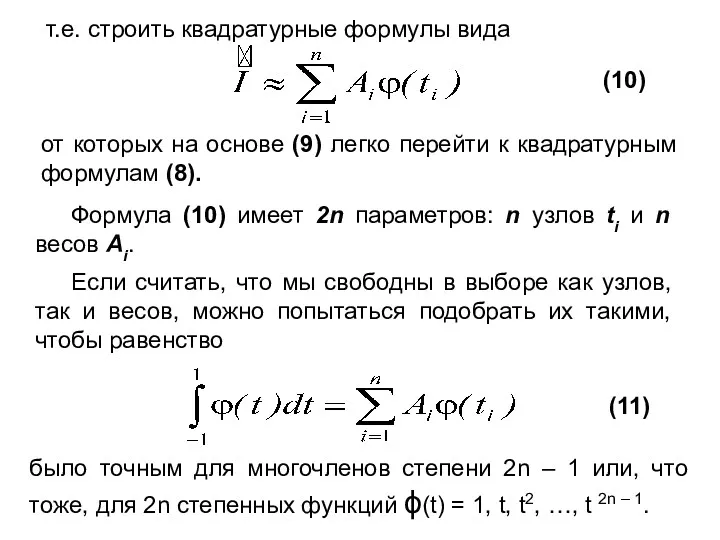
т.е. строить квадратурные формулы вида
(10)
от которых на основе (9) легко перейти
т.е. строить квадратурные формулы вида
(10)
от которых на основе (9) легко перейти
 презентация для уроков литературного чтения
презентация для уроков литературного чтения Вспоминаем, повторяем
Вспоминаем, повторяем Устный счёт 4 класс
Устный счёт 4 класс Статистическое изучение динамики социально-правовых явлений и процессов
Статистическое изучение динамики социально-правовых явлений и процессов Решение задач с величинами.
Решение задач с величинами. Умножение на два. Тренажёр помоги рыбке. (2 класс)
Умножение на два. Тренажёр помоги рыбке. (2 класс) Логикалық операциялар (дизъюнкция, конъюнкция, инверсия)
Логикалық операциялар (дизъюнкция, конъюнкция, инверсия) Графики функции у=2х
Графики функции у=2х Задачи на увеличение и уменьшение числа на несколько единиц
Задачи на увеличение и уменьшение числа на несколько единиц Сечение многогранников
Сечение многогранников Устная и письменная нумерация чисел в пределах 1000
Устная и письменная нумерация чисел в пределах 1000 Векторы. Откладывание вектора от данной точки
Векторы. Откладывание вектора от данной точки 5 саны және цифры
5 саны және цифры Факториальные кольца
Факториальные кольца Производная. Понятие о производной
Производная. Понятие о производной Старинные русские меры длины
Старинные русские меры длины 6. Уравнение окружности
6. Уравнение окружности Магические квадраты
Магические квадраты Математика в Древнем Египте
Математика в Древнем Египте Фокусы в математике
Фокусы в математике Единицы массы. Килограмм
Единицы массы. Килограмм Случайные величины
Случайные величины Нормальный алгоритм Маркова. Лекция №4
Нормальный алгоритм Маркова. Лекция №4 Цилиндр. Геометрия 11 класс
Цилиндр. Геометрия 11 класс Прямая на плоскости
Прямая на плоскости Задачи на движение
Задачи на движение Правильные и неправильные дроби
Правильные и неправильные дроби Статистичні показники
Статистичні показники