- teoriya_avtomaticheskogo_upravleniya_Polulah_parth2

Содержание
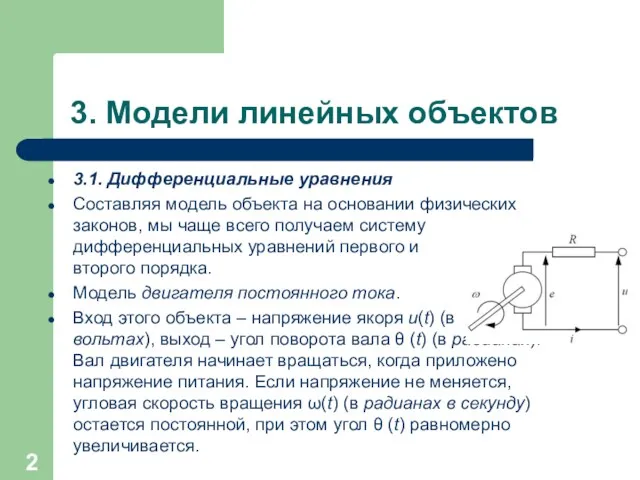
- 2. 3. Модели линейных объектов 3.1. Дифференциальные уравнения Составляя модель объекта на основании физических законов, мы чаще
- 3. 3. Модели линейных объектов Чем больше напряжение, тем быстрее вращается вал. Если зажать вал рукой (или
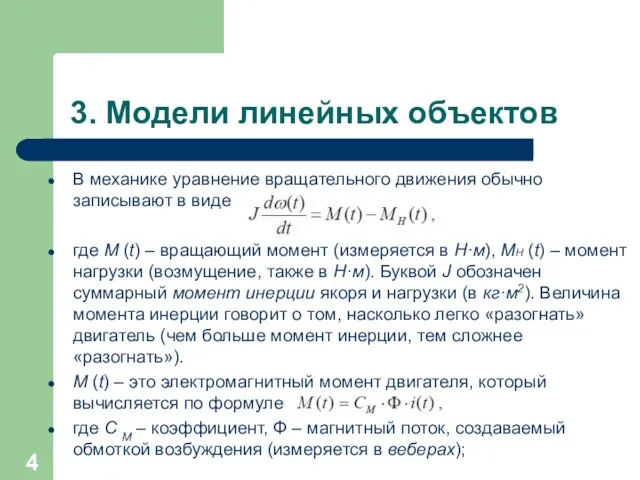
- 4. 3. Модели линейных объектов В механике уравнение вращательного движения обычно записывают в виде где M (t)
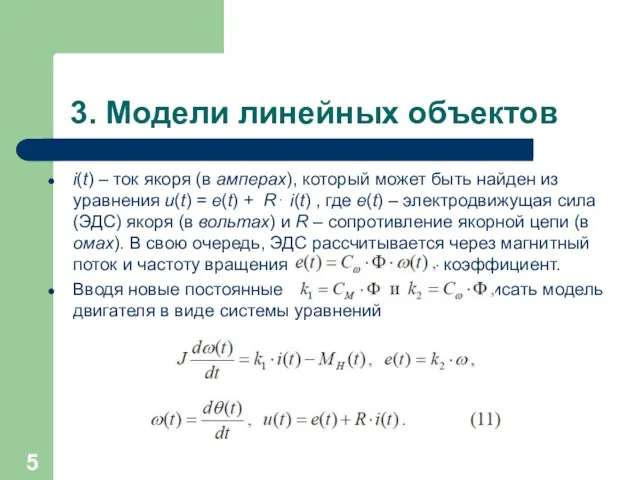
- 5. 3. Модели линейных объектов i(t) – ток якоря (в амперах), который может быть найден из уравнения
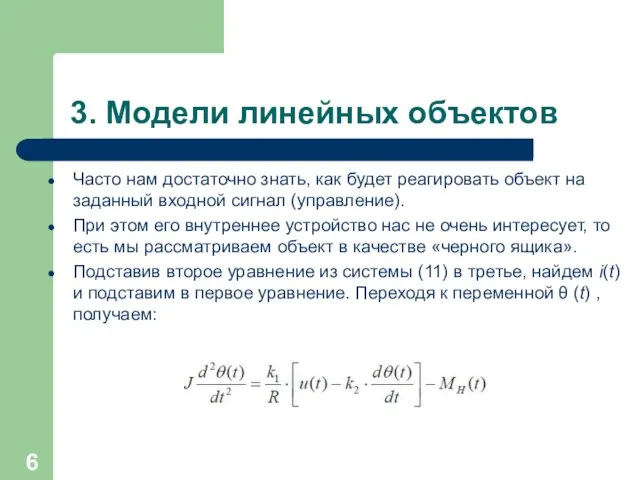
- 6. 3. Модели линейных объектов Часто нам достаточно знать, как будет реагировать объект на заданный входной сигнал
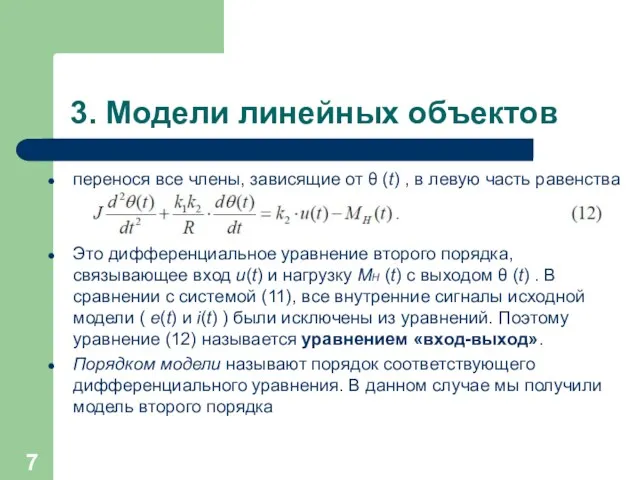
- 7. 3. Модели линейных объектов перенося все члены, зависящие от θ (t) , в левую часть равенства
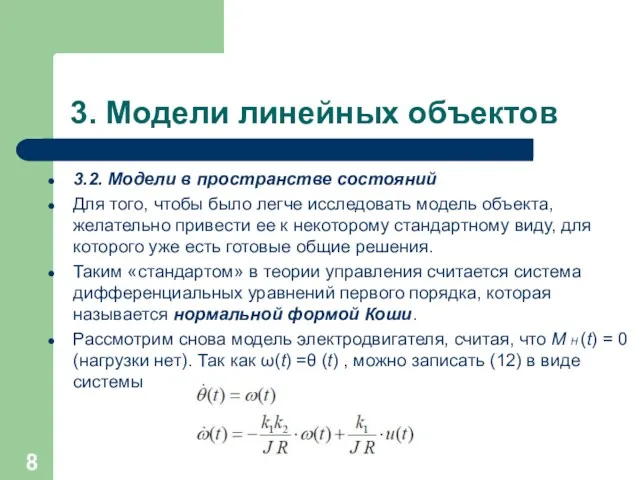
- 8. 3. Модели линейных объектов 3.2. Модели в пространстве состояний Для того, чтобы было легче исследовать модель
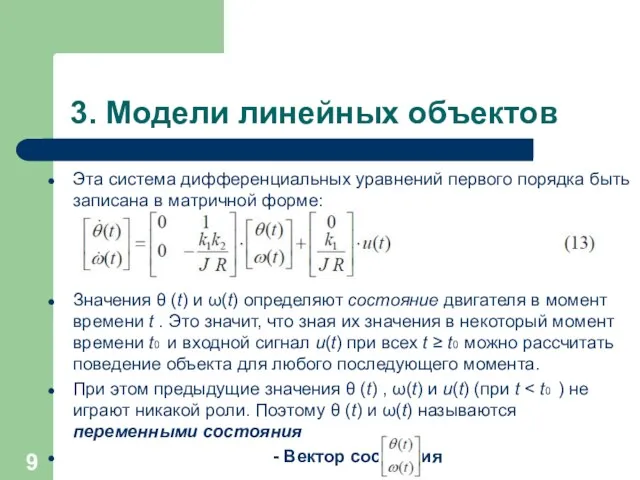
- 9. 3. Модели линейных объектов Эта система дифференциальных уравнений первого порядка быть записана в матричной форме: Значения
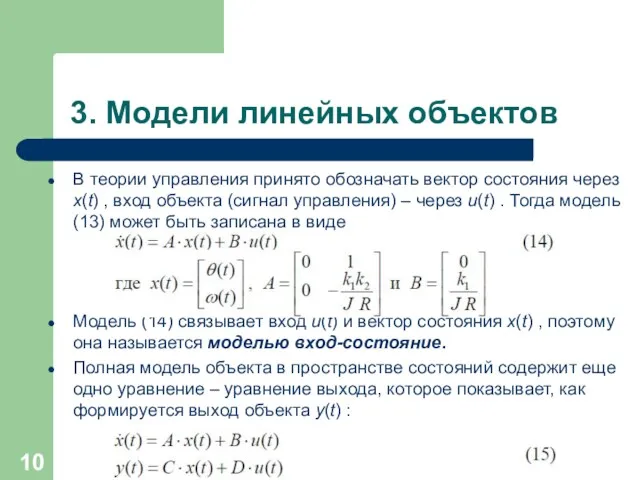
- 10. 3. Модели линейных объектов В теории управления принято обозначать вектор состояния через x(t) , вход объекта
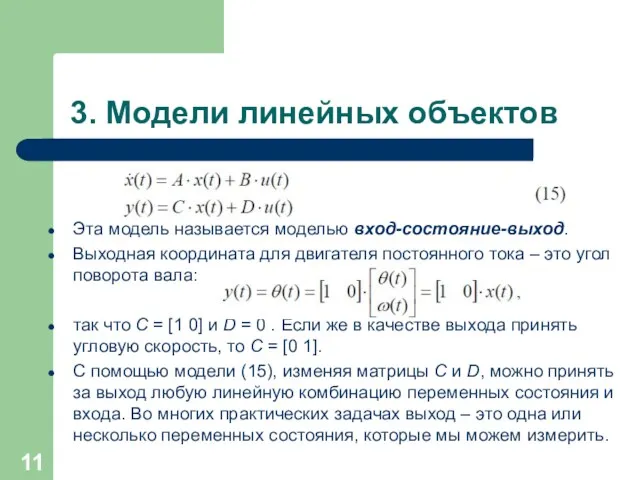
- 11. 3. Модели линейных объектов Эта модель называется моделью вход-состояние-выход. Выходная координата для двигателя постоянного тока –
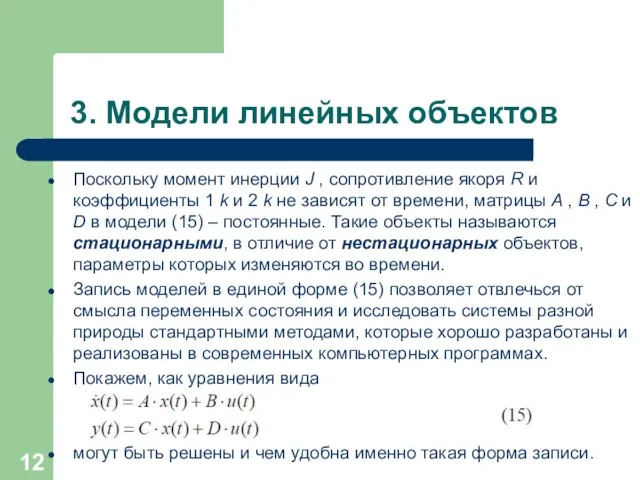
- 12. 3. Модели линейных объектов Поскольку момент инерции J , сопротивление якоря R и коэффициенты 1 k
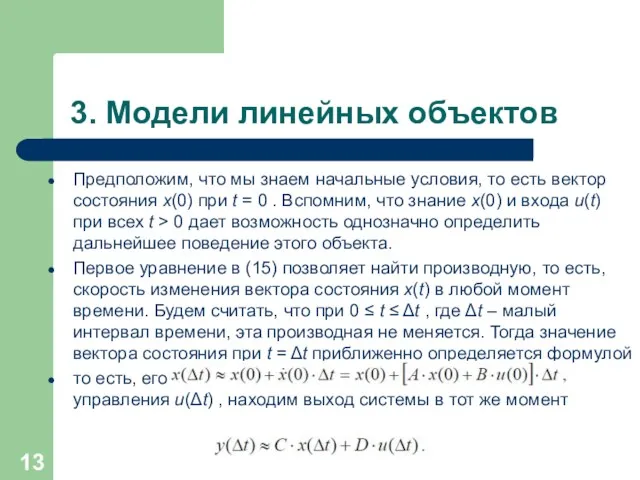
- 13. 3. Модели линейных объектов Предположим, что мы знаем начальные условия, то есть вектор состояния x(0) при
- 14. 3. Модели линейных объектов Эту методику можно применять и дальше, в конце второго интервала получаем Таким
- 15. 3. Модели линейных объектов 3.3. Переходная функция Один из методов построения моделей «вход-выход» – определение реакции
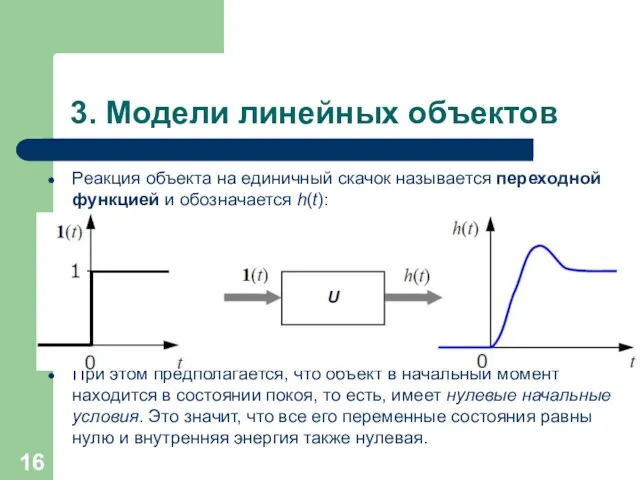
- 16. 3. Модели линейных объектов Реакция объекта на единичный скачок называется переходной функцией и обозначается h(t): При
- 17. 3. Модели линейных объектов Если начальные условия ненулевые, то для построения сигнала выхода при любом входе
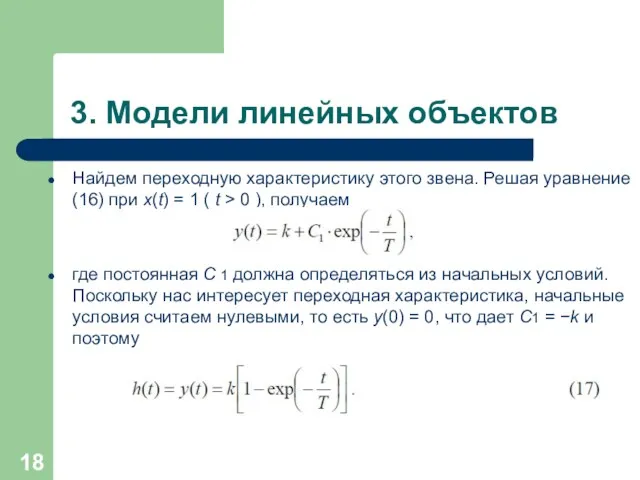
- 18. 3. Модели линейных объектов Найдем переходную характеристику этого звена. Решая уравнение (16) при x(t) = 1
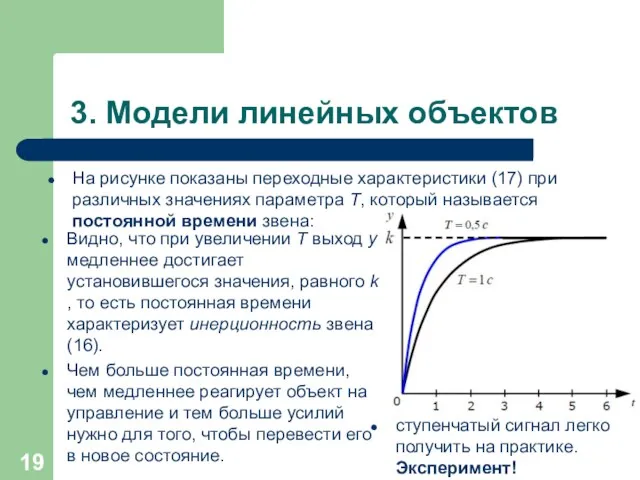
- 19. 3. Модели линейных объектов На рисунке показаны переходные характеристики (17) при различных значениях параметра T, который
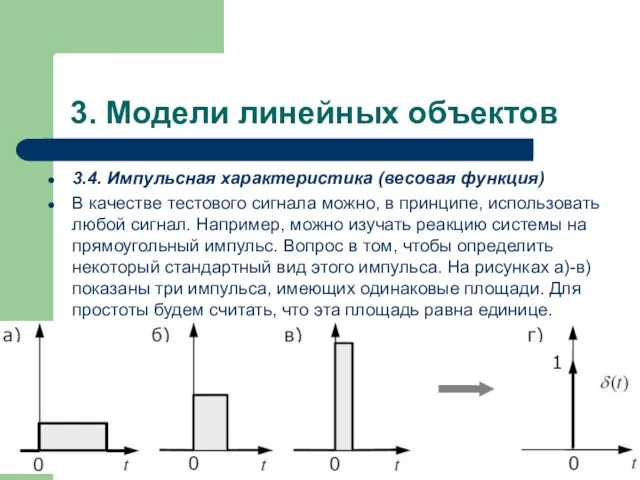
- 20. 3. Модели линейных объектов 3.4. Импульсная характеристика (весовая функция) В качестве тестового сигнала можно, в принципе,
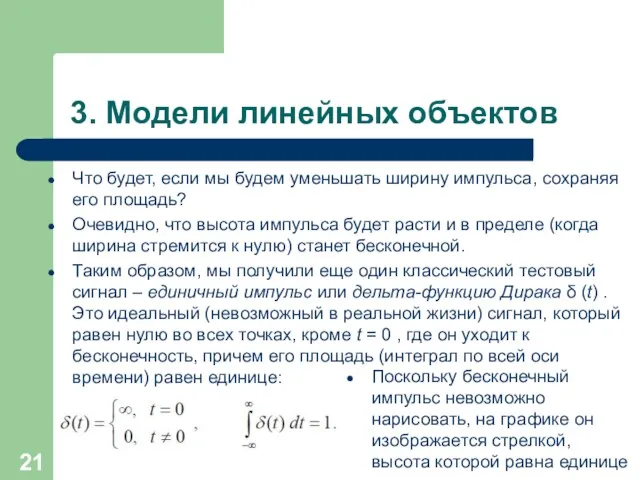
- 21. 3. Модели линейных объектов Что будет, если мы будем уменьшать ширину импульса, сохраняя его площадь? Очевидно,
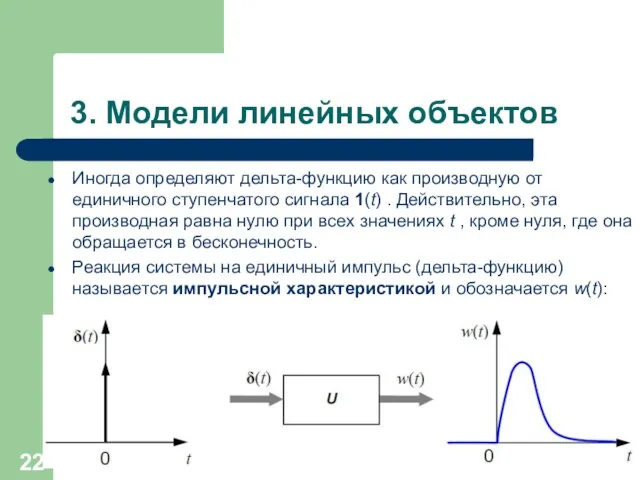
- 22. 3. Модели линейных объектов Иногда определяют дельта-функцию как производную от единичного ступенчатого сигнала 1(t) . Действительно,
- 23. 3. Модели линейных объектов Импульсная характеристика, так же, как и переходная характеристика, определяется при нулевых начальных
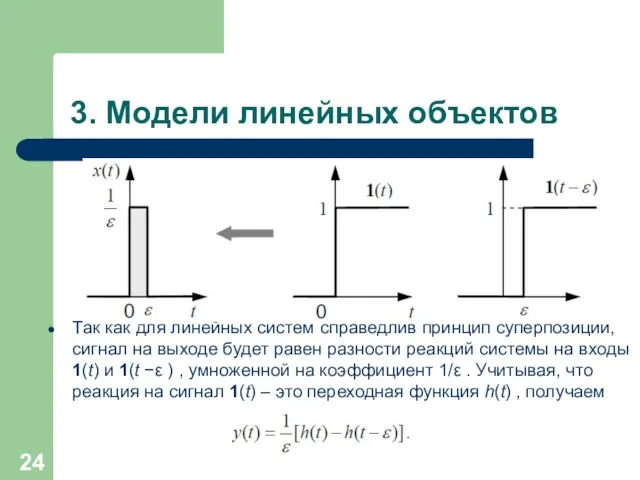
- 24. 3. Модели линейных объектов Так как для линейных систем справедлив принцип суперпозиции, сигнал на выходе будет
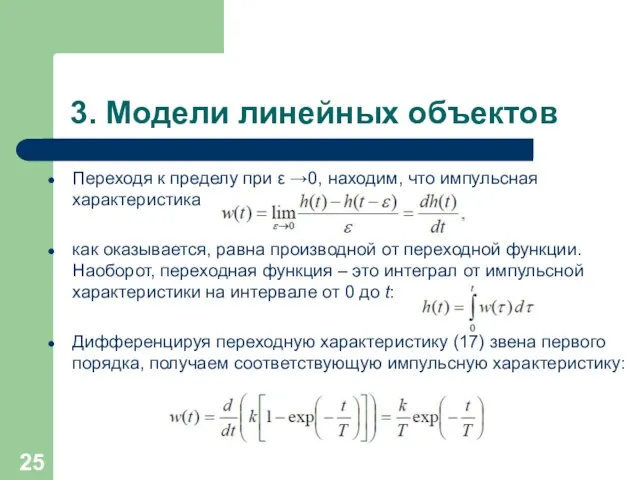
- 25. 3. Модели линейных объектов Переходя к пределу при ε →0, находим, что импульсная характеристика как оказывается,
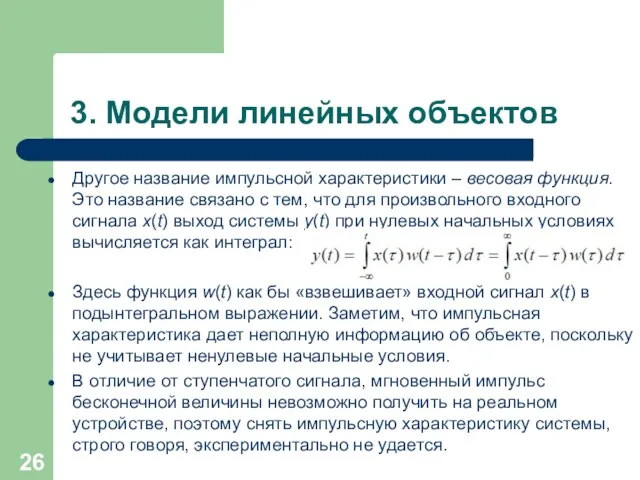
- 26. 3. Модели линейных объектов Другое название импульсной характеристики – весовая функция. Это название связано с тем,
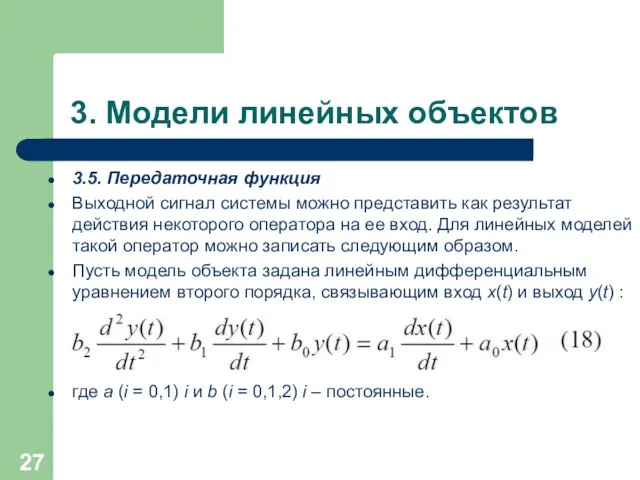
- 27. 3. Модели линейных объектов 3.5. Передаточная функция Выходной сигнал системы можно представить как результат действия некоторого
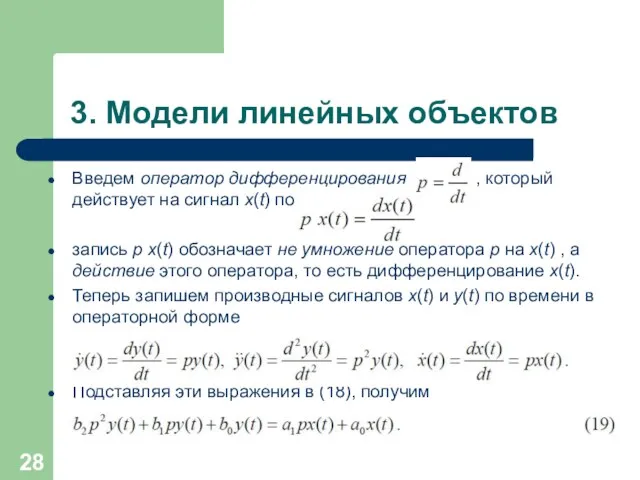
- 28. 3. Модели линейных объектов Введем оператор дифференцирования dtp = d , который действует на сигнал x(t)
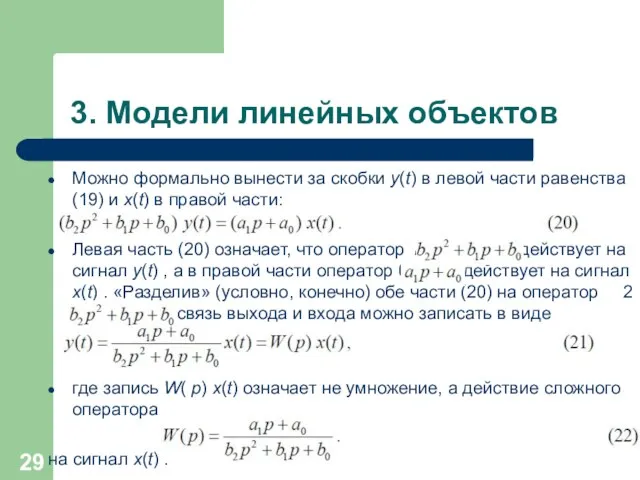
- 29. 3. Модели линейных объектов Можно формально вынести за скобки y(t) в левой части равенства (19) и
- 30. 3. Модели линейных объектов Формула y(t) =W( p) x(t) – это не что иное, как символическая
- 31. 3. Модели линейных объектов Передаточная функция W(λ ) называется правильной, если степень ее числителя не больше,
- 32. 3. Модели линейных объектов Нулями передаточной функции называются корни ее числителя, а полюсами – корни знаменателя.
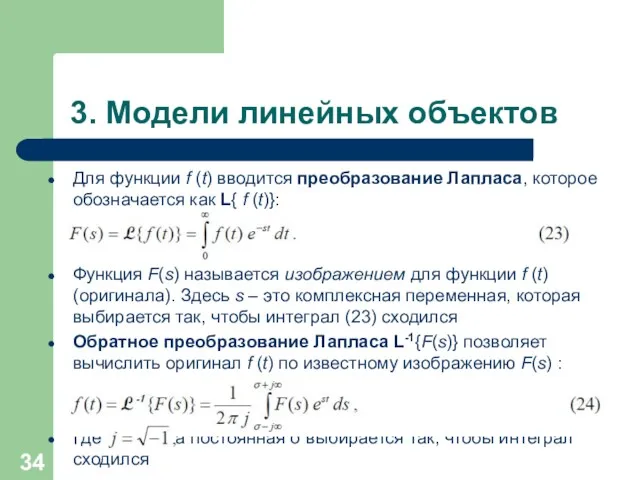
- 33. 3. Модели линейных объектов 3.6. Преобразование Лапласа 3.6.1. Что такое преобразование Лапласа? Одна из первых задач,
- 34. 3. Модели линейных объектов Для функции f (t) вводится преобразование Лапласа, которое обозначается как L{ f
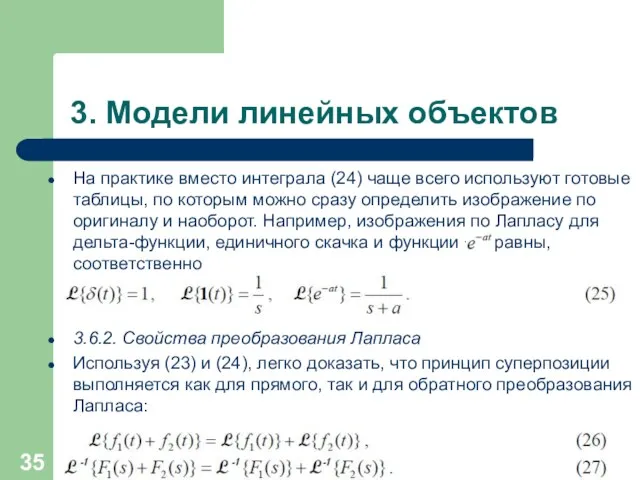
- 35. 3. Модели линейных объектов На практике вместо интеграла (24) чаще всего используют готовые таблицы, по которым
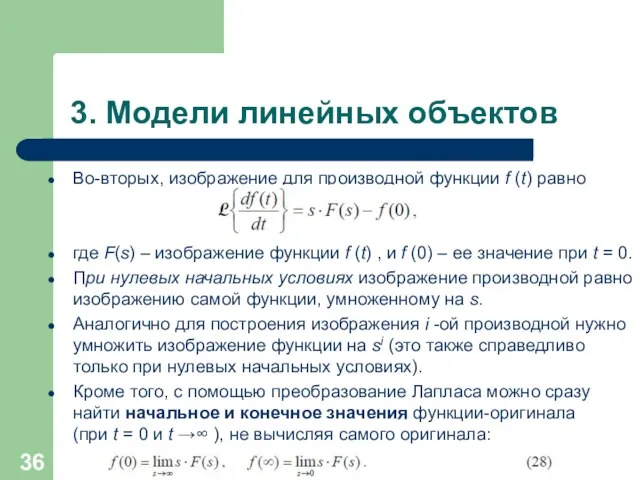
- 36. 3. Модели линейных объектов Во-вторых, изображение для производной функции f (t) равно где F(s) – изображение
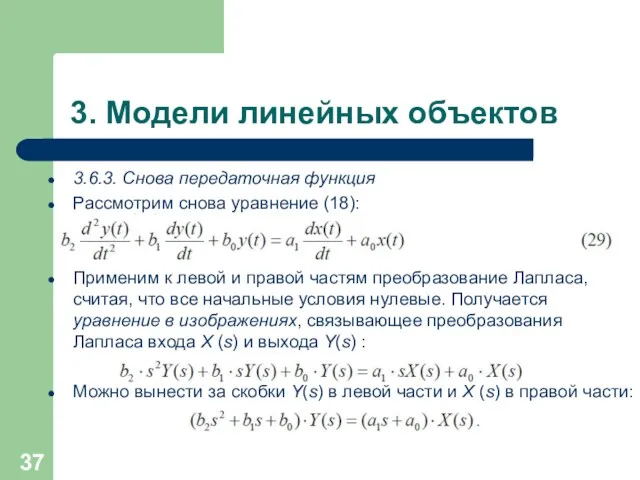
- 37. 3. Модели линейных объектов 3.6.3. Снова передаточная функция Рассмотрим снова уравнение (18): Применим к левой и
- 38. 3. Модели линейных объектов Разделив обе части этого равенства на получим: Сравнение (22) и (30) показывает,
- 39. 3. Модели линейных объектов 3.6.4. Пример Рассмотрим пример использования преобразования Лапласа для вычисления выхода системы при
- 40. 3. Модели линейных объектов Решим эту задачу с помощью передаточных функций и изображений сигналов по Лапласу.
- 41. 3. Модели линейных объектов и представляем его в виде суммы элементарных дробей: Используя принцип суперпозиции для
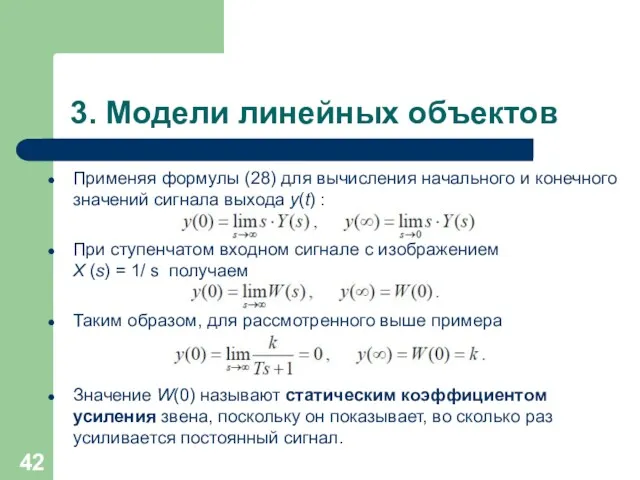
- 42. 3. Модели линейных объектов Применяя формулы (28) для вычисления начального и конечного значений сигнала выхода y(t)
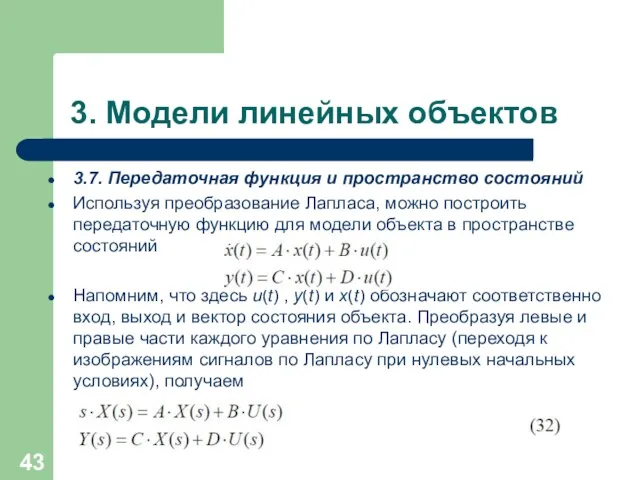
- 43. 3. Модели линейных объектов 3.7. Передаточная функция и пространство состояний Используя преобразование Лапласа, можно построить передаточную
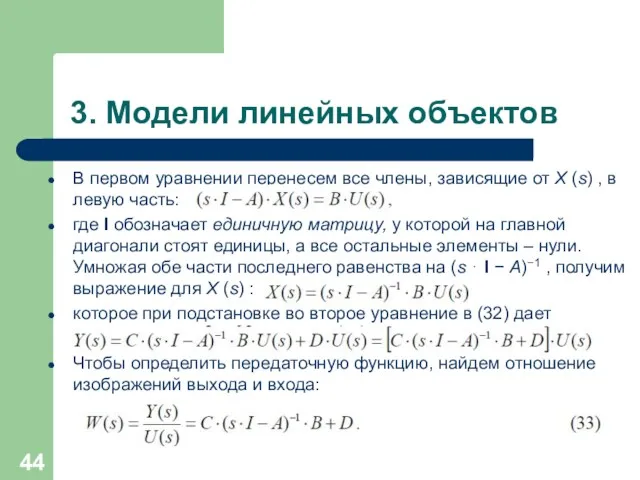
- 44. 3. Модели линейных объектов В первом уравнении перенесем все члены, зависящие от X (s) , в
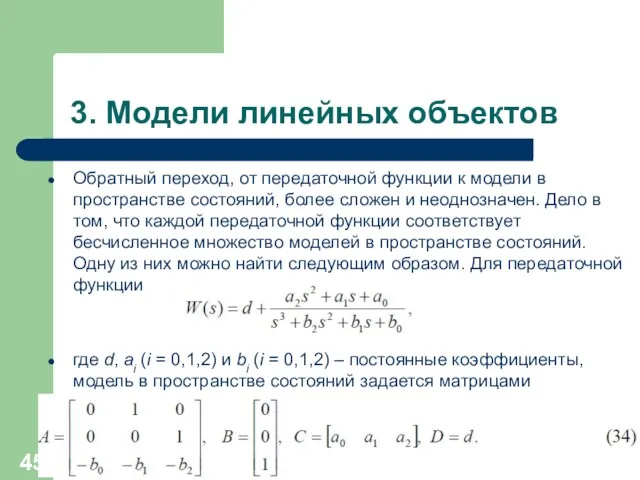
- 45. 3. Модели линейных объектов Обратный переход, от передаточной функции к модели в пространстве состояний, более сложен
- 46. 3. Модели линейных объектов При увеличении порядка передаточной функции (степени ее знаменателя), эти матрицы расширяются. В
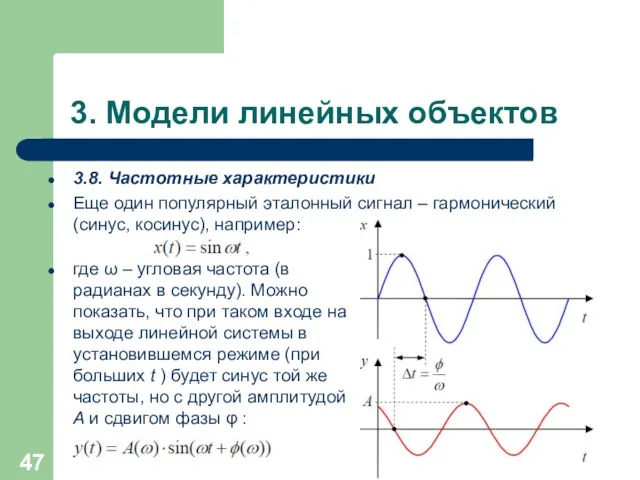
- 47. 3. Модели линейных объектов 3.8. Частотные характеристики Еще один популярный эталонный сигнал – гармонический (синус, косинус),
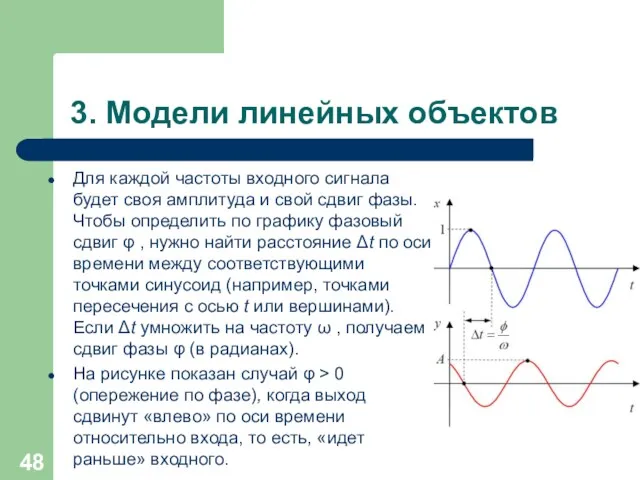
- 48. 3. Модели линейных объектов Для каждой частоты входного сигнала будет своя амплитуда и свой сдвиг фазы.
- 49. 3. Модели линейных объектов Зная передаточную функцию системы W(s) , можно вычислить амплитуду и сдвиг фазы
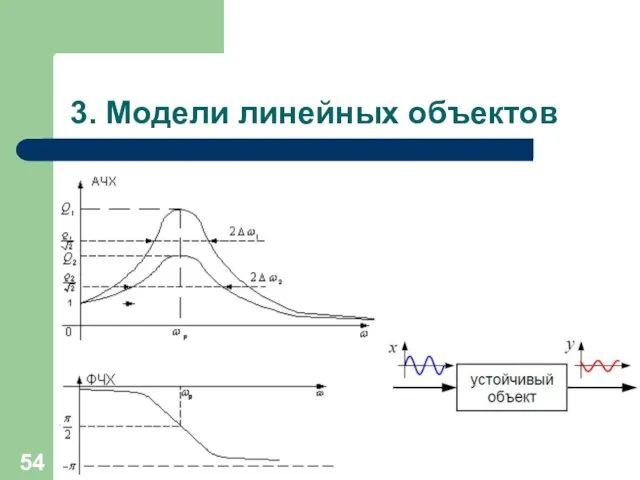
- 50. 3. Модели линейных объектов Зависимости P(ω) и Q(ω) (вещественная и мнимая части W( jω) ) –
- 51. 3. Модели линейных объектов По форме АЧХ различают несколько основных типов звеньев: 1) фильтр низких частот
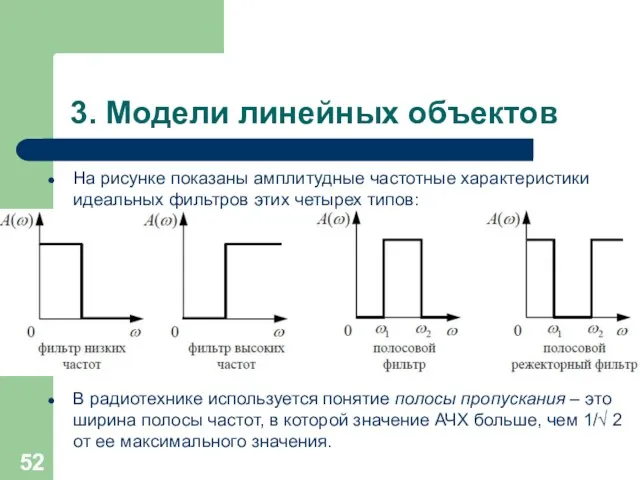
- 52. 3. Модели линейных объектов На рисунке показаны амплитудные частотные характеристики идеальных фильтров этих четырех типов: В
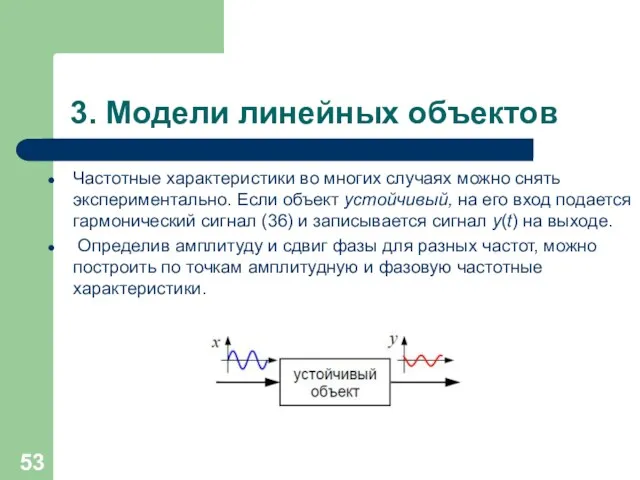
- 53. 3. Модели линейных объектов Частотные характеристики во многих случаях можно снять экспериментально. Если объект устойчивый, на
- 54. 3. Модели линейных объектов
- 56. Скачать презентацию
3. Модели линейных объектов
3.1. Дифференциальные уравнения
Составляя модель объекта на основании физических
3. Модели линейных объектов
3.1. Дифференциальные уравнения
Составляя модель объекта на основании физических
3. Модели линейных объектов
Чем больше напряжение, тем быстрее вращается вал. Если
3. Модели линейных объектов
Чем больше напряжение, тем быстрее вращается вал. Если
3. Модели линейных объектов
В механике уравнение вращательного движения обычно записывают в
3. Модели линейных объектов
В механике уравнение вращательного движения обычно записывают в
3. Модели линейных объектов
i(t) – ток якоря (в амперах), который может
3. Модели линейных объектов
i(t) – ток якоря (в амперах), который может
3. Модели линейных объектов
Часто нам достаточно знать, как будет реагировать объект
3. Модели линейных объектов
Часто нам достаточно знать, как будет реагировать объект
3. Модели линейных объектов
перенося все члены, зависящие от θ (t) ,
3. Модели линейных объектов
перенося все члены, зависящие от θ (t) ,
3. Модели линейных объектов
3.2. Модели в пространстве состояний
Для того, чтобы было
3. Модели линейных объектов
3.2. Модели в пространстве состояний
Для того, чтобы было
3. Модели линейных объектов
Эта система дифференциальных уравнений первого порядка быть записана
3. Модели линейных объектов
Эта система дифференциальных уравнений первого порядка быть записана
3. Модели линейных объектов
В теории управления принято обозначать вектор состояния через
3. Модели линейных объектов
В теории управления принято обозначать вектор состояния через
3. Модели линейных объектов
Эта модель называется моделью вход-состояние-выход.
Выходная координата для
3. Модели линейных объектов
Эта модель называется моделью вход-состояние-выход.
Выходная координата для
3. Модели линейных объектов
Поскольку момент инерции J , сопротивление якоря R
3. Модели линейных объектов
Поскольку момент инерции J , сопротивление якоря R
3. Модели линейных объектов
Предположим, что мы знаем начальные условия, то есть
3. Модели линейных объектов
Предположим, что мы знаем начальные условия, то есть
3. Модели линейных объектов
Эту методику можно применять и дальше, в конце
3. Модели линейных объектов
Эту методику можно применять и дальше, в конце
3. Модели линейных объектов
3.3. Переходная функция
Один из методов построения моделей «вход-выход»
3. Модели линейных объектов
3.3. Переходная функция
Один из методов построения моделей «вход-выход»
3. Модели линейных объектов
Реакция объекта на единичный скачок называется переходной функцией
3. Модели линейных объектов
Реакция объекта на единичный скачок называется переходной функцией
3. Модели линейных объектов
Если начальные условия ненулевые, то для построения сигнала
3. Модели линейных объектов
Если начальные условия ненулевые, то для построения сигнала
3. Модели линейных объектов
Найдем переходную характеристику этого звена. Решая уравнение (16)
3. Модели линейных объектов
Найдем переходную характеристику этого звена. Решая уравнение (16)
3. Модели линейных объектов
На рисунке показаны переходные характеристики (17) при различных
3. Модели линейных объектов
На рисунке показаны переходные характеристики (17) при различных
3. Модели линейных объектов
3.4. Импульсная характеристика (весовая функция)
В качестве тестового сигнала
3. Модели линейных объектов
3.4. Импульсная характеристика (весовая функция)
В качестве тестового сигнала
3. Модели линейных объектов
Что будет, если мы будем уменьшать ширину импульса,
3. Модели линейных объектов
Что будет, если мы будем уменьшать ширину импульса,
3. Модели линейных объектов
Иногда определяют дельта-функцию как производную от единичного ступенчатого
3. Модели линейных объектов
Иногда определяют дельта-функцию как производную от единичного ступенчатого
3. Модели линейных объектов
Импульсная характеристика, так же, как и переходная характеристика,
3. Модели линейных объектов
Импульсная характеристика, так же, как и переходная характеристика,
3. Модели линейных объектов
Так как для линейных систем справедлив принцип суперпозиции,
3. Модели линейных объектов
Так как для линейных систем справедлив принцип суперпозиции,
3. Модели линейных объектов
Переходя к пределу при ε →0, находим, что
3. Модели линейных объектов
Переходя к пределу при ε →0, находим, что
3. Модели линейных объектов
Другое название импульсной характеристики – весовая функция. Это
3. Модели линейных объектов
Другое название импульсной характеристики – весовая функция. Это
3. Модели линейных объектов
3.5. Передаточная функция
Выходной сигнал системы можно представить как
3. Модели линейных объектов
3.5. Передаточная функция
Выходной сигнал системы можно представить как
3. Модели линейных объектов
Введем оператор дифференцирования dtp = d , который
3. Модели линейных объектов
Введем оператор дифференцирования dtp = d , который
3. Модели линейных объектов
Можно формально вынести за скобки y(t) в левой
3. Модели линейных объектов
Можно формально вынести за скобки y(t) в левой
3. Модели линейных объектов
Формула y(t) =W( p) x(t) – это не
3. Модели линейных объектов
Формула y(t) =W( p) x(t) – это не
3. Модели линейных объектов
Передаточная функция W(λ ) называется правильной, если степень
3. Модели линейных объектов
Передаточная функция W(λ ) называется правильной, если степень
3. Модели линейных объектов
Нулями передаточной функции называются корни ее числителя, а
3. Модели линейных объектов
Нулями передаточной функции называются корни ее числителя, а
3. Модели линейных объектов
3.6. Преобразование Лапласа
3.6.1. Что такое преобразование Лапласа?
Одна из
3. Модели линейных объектов
3.6. Преобразование Лапласа
3.6.1. Что такое преобразование Лапласа?
Одна из
3. Модели линейных объектов
Для функции f (t) вводится преобразование Лапласа, которое
3. Модели линейных объектов
Для функции f (t) вводится преобразование Лапласа, которое
3. Модели линейных объектов
На практике вместо интеграла (24) чаще всего используют
3. Модели линейных объектов
На практике вместо интеграла (24) чаще всего используют
3. Модели линейных объектов
Во-вторых, изображение для производной функции f (t) равно
где
3. Модели линейных объектов
Во-вторых, изображение для производной функции f (t) равно
где
3. Модели линейных объектов
3.6.3. Снова передаточная функция
Рассмотрим снова уравнение (18):
Применим к
3. Модели линейных объектов
3.6.3. Снова передаточная функция
Рассмотрим снова уравнение (18):
Применим к
3. Модели линейных объектов
Разделив обе части этого равенства на получим:
Сравнение (22)
3. Модели линейных объектов
Разделив обе части этого равенства на получим:
Сравнение (22)
3. Модели линейных объектов
3.6.4. Пример
Рассмотрим пример использования преобразования Лапласа для вычисления
3. Модели линейных объектов
3.6.4. Пример
Рассмотрим пример использования преобразования Лапласа для вычисления
3. Модели линейных объектов
Решим эту задачу с помощью передаточных функций и
3. Модели линейных объектов
Решим эту задачу с помощью передаточных функций и
3. Модели линейных объектов
и представляем его в виде суммы элементарных дробей:
Используя
3. Модели линейных объектов
и представляем его в виде суммы элементарных дробей:
Используя
3. Модели линейных объектов
Применяя формулы (28) для вычисления начального и конечного
3. Модели линейных объектов
Применяя формулы (28) для вычисления начального и конечного
3. Модели линейных объектов
3.7. Передаточная функция и пространство состояний
Используя преобразование Лапласа,
3. Модели линейных объектов
3.7. Передаточная функция и пространство состояний
Используя преобразование Лапласа,
3. Модели линейных объектов
В первом уравнении перенесем все члены, зависящие от
3. Модели линейных объектов
В первом уравнении перенесем все члены, зависящие от
3. Модели линейных объектов
Обратный переход, от передаточной функции к модели в
3. Модели линейных объектов
Обратный переход, от передаточной функции к модели в
3. Модели линейных объектов
При увеличении порядка передаточной функции (степени ее знаменателя),
3. Модели линейных объектов
При увеличении порядка передаточной функции (степени ее знаменателя),
3. Модели линейных объектов
3.8. Частотные характеристики
Еще один популярный эталонный сигнал –
3. Модели линейных объектов
3.8. Частотные характеристики
Еще один популярный эталонный сигнал –
3. Модели линейных объектов
Для каждой частоты входного сигнала будет своя амплитуда
3. Модели линейных объектов
Для каждой частоты входного сигнала будет своя амплитуда
3. Модели линейных объектов
Зная передаточную функцию системы W(s) , можно вычислить
3. Модели линейных объектов
Зная передаточную функцию системы W(s) , можно вычислить
3. Модели линейных объектов
Зависимости P(ω) и Q(ω) (вещественная и мнимая части
3. Модели линейных объектов
Зависимости P(ω) и Q(ω) (вещественная и мнимая части
3. Модели линейных объектов
По форме АЧХ различают несколько основных типов звеньев:
1)
3. Модели линейных объектов
По форме АЧХ различают несколько основных типов звеньев:
1)
3. Модели линейных объектов
На рисунке показаны амплитудные частотные характеристики идеальных фильтров
3. Модели линейных объектов
На рисунке показаны амплитудные частотные характеристики идеальных фильтров
3. Модели линейных объектов
Частотные характеристики во многих случаях можно снять экспериментально.
3. Модели линейных объектов
Частотные характеристики во многих случаях можно снять экспериментально.
3. Модели линейных объектов
3. Модели линейных объектов
 Решение систем линейных алгебраических уравнений по правилу Крамера, матричным методом, методом Гаусса
Решение систем линейных алгебраических уравнений по правилу Крамера, матричным методом, методом Гаусса Правильные многоугольники. 9 класс
Правильные многоугольники. 9 класс Тестовые задания. 7 класс. Геометрия
Тестовые задания. 7 класс. Геометрия Свойства степени с натуральным показателем
Свойства степени с натуральным показателем Индексный метод
Индексный метод Deyxtry_algoritm
Deyxtry_algoritm Умножение числа на 100.
Умножение числа на 100. Иррациональные уравнения и неравенства
Иррациональные уравнения и неравенства Арифметический квадратный корень
Арифметический квадратный корень Портфолио учителя математики и информатики
Портфолио учителя математики и информатики Функция y=cosx и ее свойства
Функция y=cosx и ее свойства Десятичная запись дробей
Десятичная запись дробей Математическое странствие
Математическое странствие Доли. Обыкновенные дроби
Доли. Обыкновенные дроби Решение задач с процентами: нахождение числа по процентам. 5 класс
Решение задач с процентами: нахождение числа по процентам. 5 класс Координаты на прямой. 6 класс
Координаты на прямой. 6 класс Перспективные масштабы геометрических тел
Перспективные масштабы геометрических тел Начертательная геометрия. Пересечение прямой линии с поверхностью. (Лекция 3)
Начертательная геометрия. Пересечение прямой линии с поверхностью. (Лекция 3) События. Вероятность. Теоремы сложения и умножения вероятностей
События. Вероятность. Теоремы сложения и умножения вероятностей Задачи на разрезание и перекраивания фигур
Задачи на разрезание и перекраивания фигур Счёт до 10. Образовательная деятельность с детьми 5-6 лет
Счёт до 10. Образовательная деятельность с детьми 5-6 лет Векторы на плоскости. Работа по геометрии
Векторы на плоскости. Работа по геометрии Методы прогнозирования
Методы прогнозирования Преобразования графиков функций
Преобразования графиков функций Эффективная подготовка учащихся к ОГЭ и ЕГЭ по математике
Эффективная подготовка учащихся к ОГЭ и ЕГЭ по математике 20231121_urok_algebry_v_7_klasse_vzaimnoe_raspolozhenie_grafikov_lineynyh_funktsiy_prezentatsiya
20231121_urok_algebry_v_7_klasse_vzaimnoe_raspolozhenie_grafikov_lineynyh_funktsiy_prezentatsiya Действия с обыкновенными дробями. Обобщающий урок
Действия с обыкновенными дробями. Обобщающий урок Симметрия в природе
Симметрия в природе