- Vectors and the geometry of space

Содержание
- 2. VECTORS AND THE GEOMETRY OF SPACE A line in the xy-plane is determined when a point
- 3. Equations of Lines and Planes In this section, we will learn how to: Define three-dimensional lines
- 4. EQUATIONS OF LINES A line L in three-dimensional (3-D) space is determined when we know: A
- 5. EQUATIONS OF LINES In three dimensions, the direction of a line is conveniently described by a
- 6. EQUATIONS OF LINES So, we let v be a vector parallel to L. Let P(x, y,
- 7. EQUATIONS OF LINES If a is the vector with representation , then the Triangle Law for
- 8. EQUATIONS OF LINES However, since a and v are parallel vectors, there is a scalar t
- 9. VECTOR EQUATION OF A LINE Thus, r = r0 + t v This is a vector
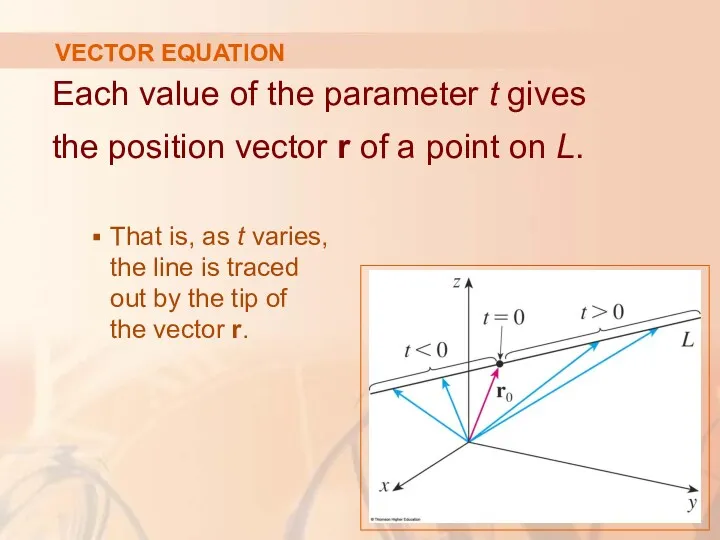
- 10. VECTOR EQUATION Each value of the parameter t gives the position vector r of a point
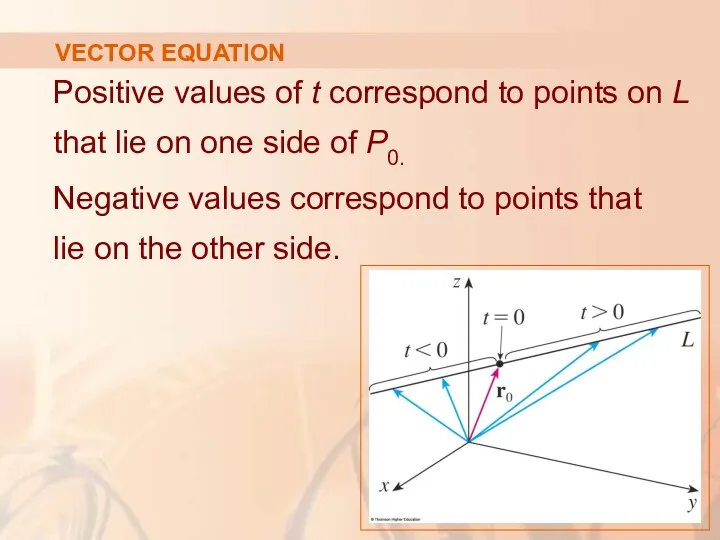
- 11. VECTOR EQUATION Positive values of t correspond to points on L that lie on one side
- 12. VECTOR EQUATION If the vector v that gives the direction of the line L is written
- 13. VECTOR EQUATION We can also write: r = and r0 = So, vector Equation 1 becomes:
- 14. VECTOR EQUATION Two vectors are equal if and only if corresponding components are equal. Hence, we
- 15. SCALAR EQUATIONS OF A LINE x = x0 + at y = y0 + bt z
- 16. PARAMETRIC EQUATIONS These equations are called parametric equations of the line L through the point P0(x0,
- 17. EQUATIONS OF LINES Find a vector equation and parametric equations for the line that passes through
- 18. EQUATIONS OF LINES Here, r0 = = 5 i + j + 3 k and v
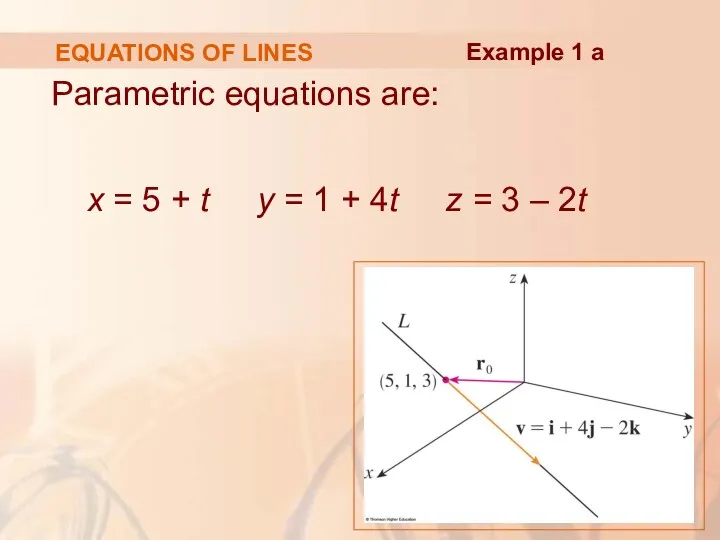
- 19. EQUATIONS OF LINES Parametric equations are: x = 5 + t y = 1 + 4t
- 20. EQUATIONS OF LINES Choosing the parameter value t = 1 gives x = 6, y =
- 21. EQUATIONS OF LINES The vector equation and parametric equations of a line are not unique. If
- 22. EQUATIONS OF LINES For instance, if, instead of (5, 1, 3), we choose the point (6,
- 23. EQUATIONS OF LINES Alternatively, if we stay with the point (5, 1, 3) but choose the
- 24. DIRECTION NUMBERS In general, if a vector v = is used to describe the direction of
- 25. DIRECTION NUMBERS Any vector parallel to v could also be used. Thus, we see that any
- 26. EQUATIONS OF LINES Another way of describing a line L is to eliminate the parameter t
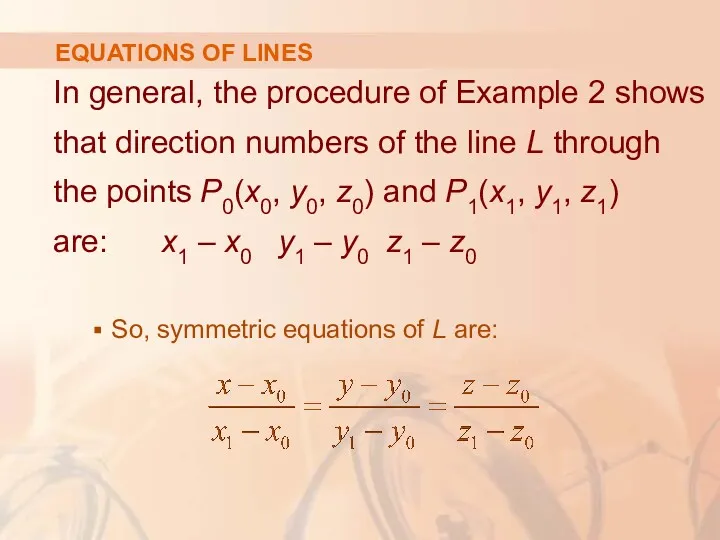
- 27. SYMMETRIC EQUATIONS These equations are called symmetric equations of L. Equations 3
- 28. SYMMETRIC EQUATIONS Notice that the numbers a, b, and c that appear in the denominators of
- 29. SYMMETRIC EQUATIONS If one of a, b, or c is 0, we can still eliminate t.
- 30. EQUATIONS OF LINES Find parametric equations and symmetric equations of the line that passes through the
- 31. EQUATIONS OF LINES We are not explicitly given a vector parallel to the line. However, observe
- 32. EQUATIONS OF LINES Thus, direction numbers are: a = 1, b = –5, c = 4
- 33. EQUATIONS OF LINES Taking the point (2, 4, –3) as P0, we see that: Parametric Equations
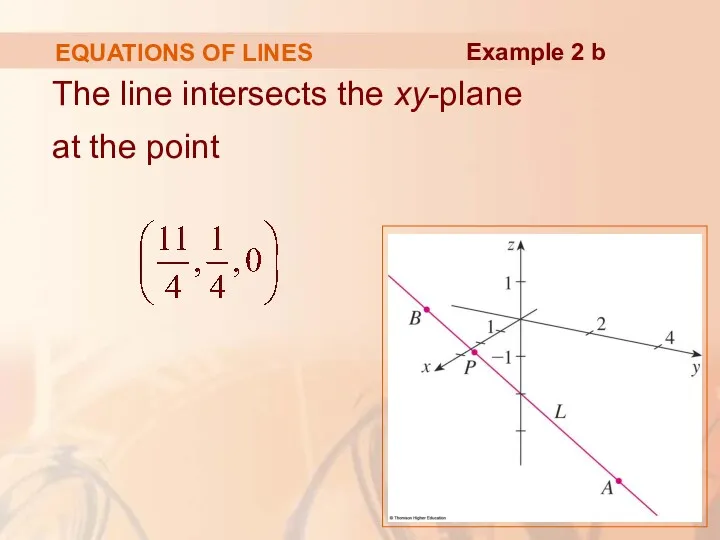
- 34. EQUATIONS OF LINES The line intersects the xy-plane when z = 0. So, we put z
- 35. EQUATIONS OF LINES The line intersects the xy-plane at the point Example 2 b
- 36. EQUATIONS OF LINES In general, the procedure of Example 2 shows that direction numbers of the
- 37. EQUATIONS OF LINE SEGMENTS Often, we need a description, not of an entire line, but of
- 38. EQUATIONS OF LINE SEGMENTS If we put t = 0 in the parametric equations in Example
- 39. EQUATIONS OF LINE SEGMENTS So, the line segment AB is described by either: The parametric equations
- 40. EQUATIONS OF LINE SEGMENTS In general, we know from Equation 1 that the vector equation of
- 41. EQUATIONS OF LINE SEGMENTS If the line also passes through (the tip of) r1, then we
- 42. EQUATIONS OF LINE SEGMENTS The line segment from r0 to r1 is given by the vector
- 43. EQUATIONS OF LINE SEGMENTS Show that the lines L1 and L2 with parametric equations x =
- 44. EQUATIONS OF LINE SEGMENTS The lines are not parallel because the corresponding vectors and are not
- 45. EQUATIONS OF LINE SEGMENTS If L1 and L2 had a point of intersection, there would be
- 46. EQUATIONS OF LINE SEGMENTS However, if we solve the first two equations, we get: t =
- 47. EQUATIONS OF LINE SEGMENTS Thus, there are no values of t and s that satisfy the
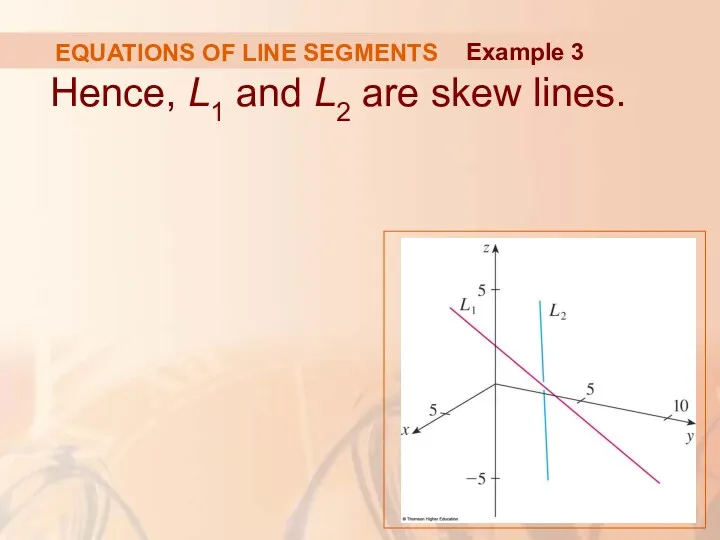
- 48. EQUATIONS OF LINE SEGMENTS Hence, L1 and L2 are skew lines. Example 3
- 49. PLANES Although a line in space is determined by a point and a direction, a plane
- 50. PLANES However, a vector perpendicular to the plane does completely specify its direction.
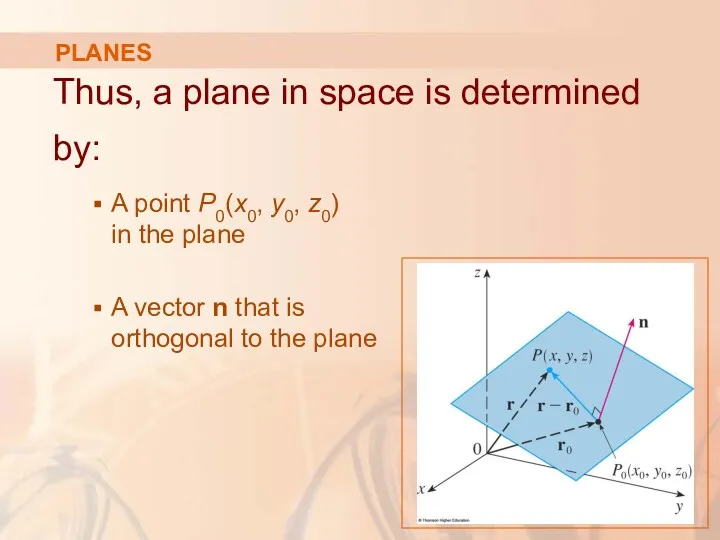
- 51. PLANES Thus, a plane in space is determined by: A point P0(x0, y0, z0) in the
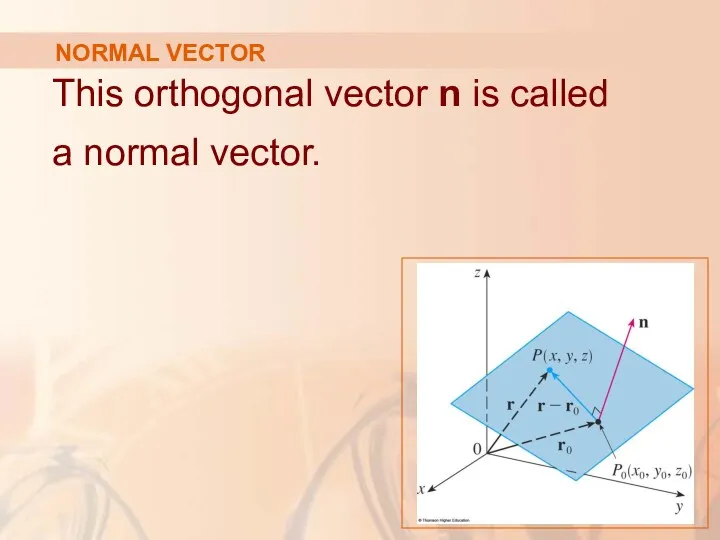
- 52. NORMAL VECTOR This orthogonal vector n is called a normal vector.
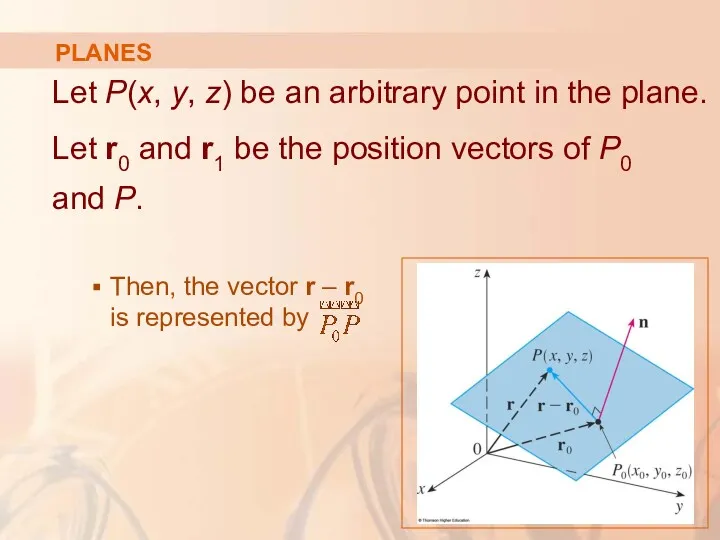
- 53. PLANES Let P(x, y, z) be an arbitrary point in the plane. Let r0 and r1
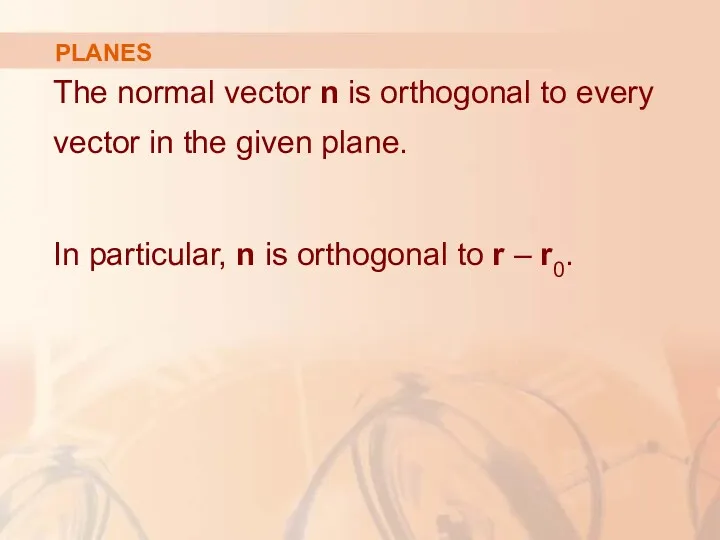
- 54. PLANES The normal vector n is orthogonal to every vector in the given plane. In particular,
- 55. EQUATIONS OF PLANES Thus, we have: n . (r – r0) = 0 Equation 5
- 56. EQUATIONS OF PLANES That can also be written as: n . r = n . r0
- 57. VECTOR EQUATION Either Equation 5 or Equation 6 is called a vector equation of the plane.
- 58. EQUATIONS OF PLANES To obtain a scalar equation for the plane, we write: n = r
- 59. EQUATIONS OF PLANES Then, the vector Equation 5 becomes: . = 0
- 60. SCALAR EQUATION That can also be written as: a(x – x0) + b(y – y0) +
- 61. EQUATIONS OF PLANES Find an equation of the plane through the point (2, 4, –1) with
- 62. EQUATIONS OF PLANES In Equation 7, putting a = 2, b = 3, c = 4,
- 63. EQUATIONS OF PLANES To find the x-intercept, we set y = z = 0 in the
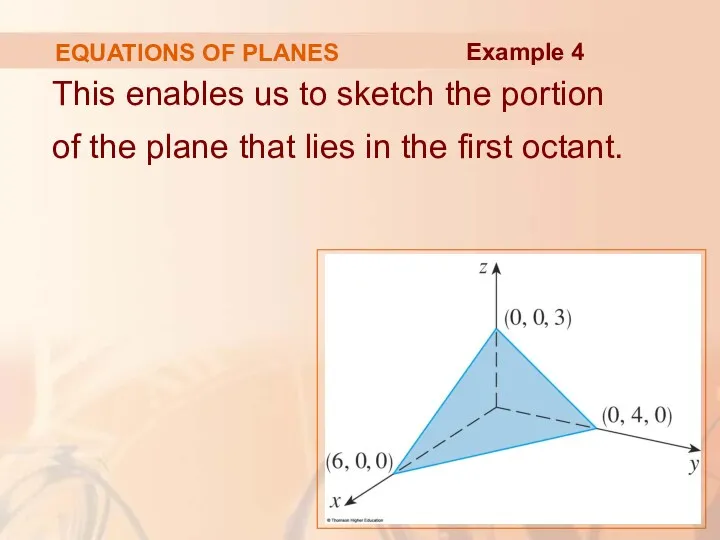
- 64. EQUATIONS OF PLANES This enables us to sketch the portion of the plane that lies in
- 65. EQUATIONS OF PLANES By collecting terms in Equation 7 as we did in Example 4, we
- 66. LINEAR EQUATION ax + by + cz + d = 0 where d = –(ax0 +
- 67. LINEAR EQUATION Conversely, it can be shown that, if a, b, and c are not all
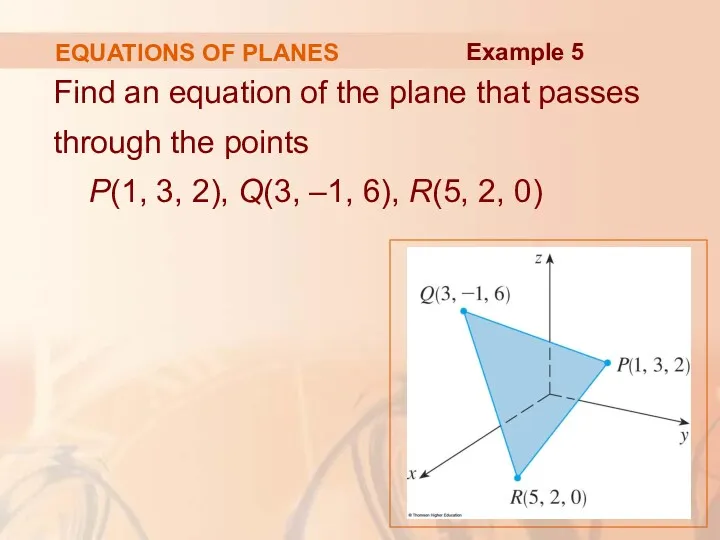
- 68. EQUATIONS OF PLANES Find an equation of the plane that passes through the points P(1, 3,
- 69. EQUATIONS OF PLANES The vectors a and b corresponding to and are: a = b =
- 70. EQUATIONS OF PLANES Since both a and b lie in the plane, their cross product a
- 71. EQUATIONS OF PLANES Thus, Example 5
- 72. EQUATIONS OF PLANES With the point P(1, 2, 3) and the normal vector n, an equation
- 73. EQUATIONS OF PLANES Find the point at which the line with parametric equations x = 2
- 74. EQUATIONS OF PLANES We substitute the expressions for x, y, and z from the parametric equations
- 75. EQUATIONS OF PLANES That simplifies to –10t = 20. Hence, t = –2. Therefore, the point
- 76. EQUATIONS OF PLANES Then, x = 2 + 3(–2) = –4 y = –4(–2) = 8
- 77. PARALLEL PLANES Two planes are parallel if their normal vectors are parallel.
- 78. PARALLEL PLANES For instance, the planes x + 2y – 3z = 4 and 2x +
- 79. NONPARALLEL PLANES If two planes are not parallel, then They intersect in a straight line. The
- 80. EQUATIONS OF PLANES Find the angle between the planes x + y + z = 1
- 81. EQUATIONS OF PLANES The normal vectors of these planes are: n1 = n2 = Example 7
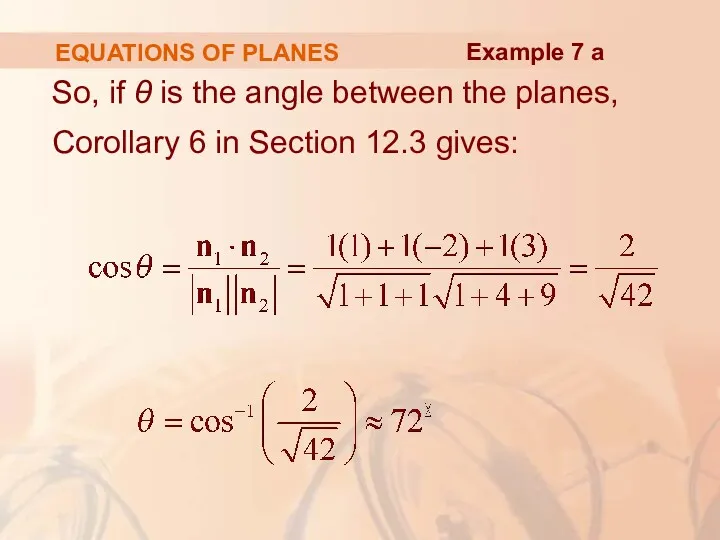
- 82. EQUATIONS OF PLANES So, if θ is the angle between the planes, Corollary 6 in Section
- 83. EQUATIONS OF PLANES We first need to find a point on L. For instance, we can
- 84. EQUATIONS OF PLANES As L lies in both planes, it is perpendicular to both the normal
- 85. EQUATIONS OF PLANES So, the symmetric equations of L can be written as: Example 7 b
- 86. NOTE A linear equation in x, y, and z represents a plane. Also, two nonparallel planes
- 87. NOTE The points (x, y, z) that satisfy both a1x + b1y + c1z + d1
- 88. NOTE For instance, in Example 7, the line L was given as the line of intersection
- 89. NOTE The symmetric equations that we found for L could be written as: This is again
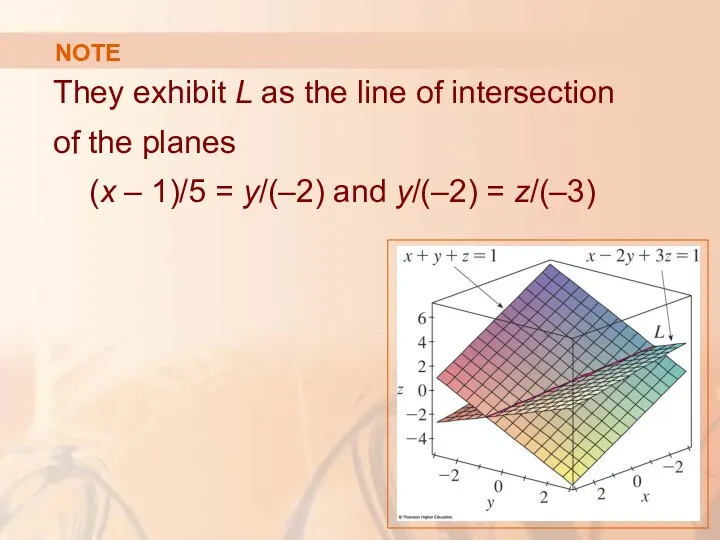
- 90. NOTE They exhibit L as the line of intersection of the planes (x – 1)/5 =
- 91. NOTE In general, when we write the equations of a line in the symmetric form we
- 92. EQUATIONS OF PLANES Find a formula for the distance D from a point P1(x1, y1, z1)
- 93. EQUATIONS OF PLANES Let P0(x0, y0, z0) be any point in the plane. Let b be
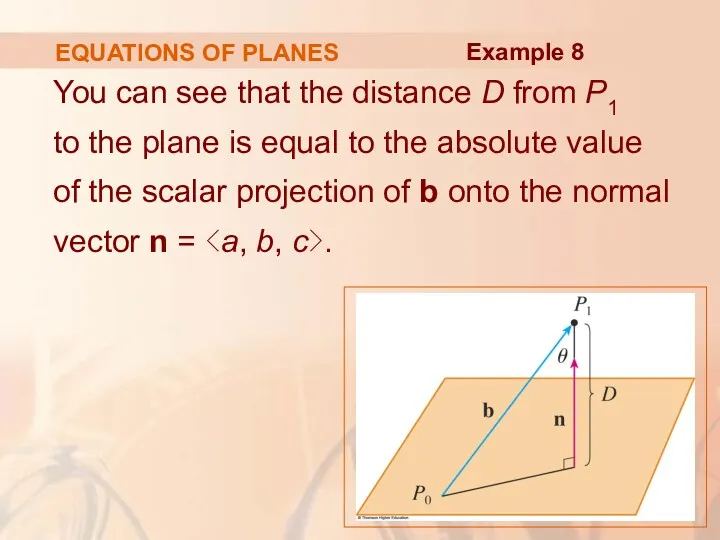
- 94. EQUATIONS OF PLANES You can see that the distance D from P1 to the plane is
- 95. EQUATIONS OF PLANES Thus, Example 8
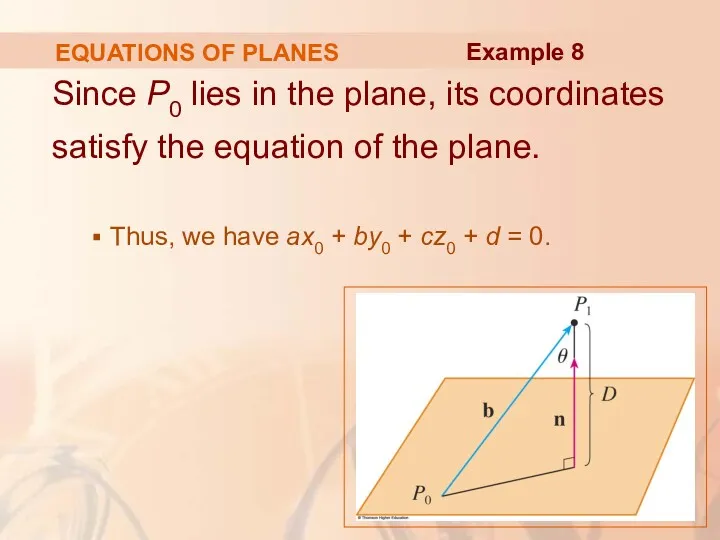
- 96. EQUATIONS OF PLANES Since P0 lies in the plane, its coordinates satisfy the equation of the
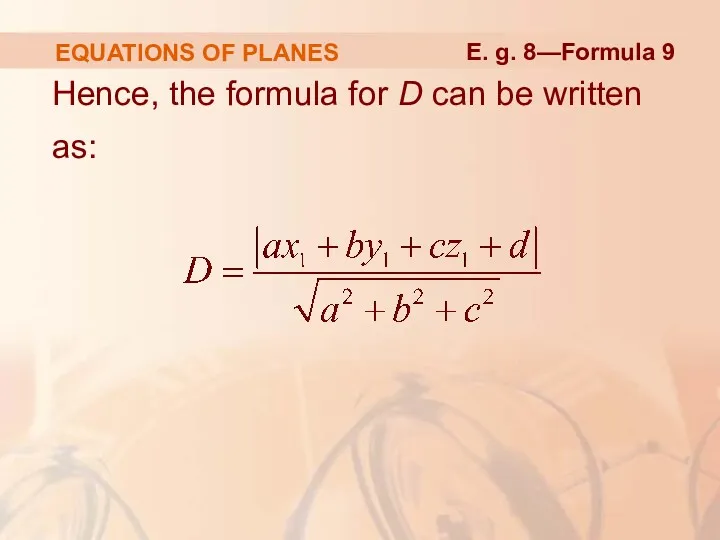
- 97. EQUATIONS OF PLANES Hence, the formula for D can be written as: E. g. 8—Formula 9
- 98. EQUATIONS OF PLANES Find the distance between the parallel planes 10x + 2y – 2z =
- 99. EQUATIONS OF PLANES First, we note that the planes are parallel because their normal vectors and
- 100. EQUATIONS OF PLANES To find the distance D between the planes, we choose any point on
- 101. EQUATIONS OF PLANES By Formula 9, the distance between (½, 0, 0) and the plane 5x
- 102. EQUATIONS OF PLANES In Example 3, we showed that the lines L1: x = 1 +
- 103. EQUATIONS OF PLANES Since the two lines L1 and L2 are skew, they can be viewed
- 104. EQUATIONS OF PLANES The common normal vector to both planes must be orthogonal to both v1
- 105. EQUATIONS OF PLANES So, a normal vector is: Example 10
- 106. EQUATIONS OF PLANES If we put s = 0 in the equations of L2, we get
- 107. EQUATIONS OF PLANES If we now set t = 0 in the equations for L1, we
- 108. EQUATIONS OF PLANES So, the distance between L1 and L2 is the same as the distance
- 110. Скачать презентацию
VECTORS AND THE GEOMETRY OF SPACE
A line in the xy-plane is
VECTORS AND THE GEOMETRY OF SPACE
A line in the xy-plane is
Equations of
Lines and Planes
In this section, we will learn how
Equations of
Lines and Planes
In this section, we will learn how
EQUATIONS OF LINES
A line L in three-dimensional (3-D) space
is determined
EQUATIONS OF LINES
A line L in three-dimensional (3-D) space is determined
EQUATIONS OF LINES
In three dimensions, the direction
of a line is
EQUATIONS OF LINES
In three dimensions, the direction of a line is
EQUATIONS OF LINES
So, we let v be a vector parallel to
EQUATIONS OF LINES
So, we let v be a vector parallel to
EQUATIONS OF LINES
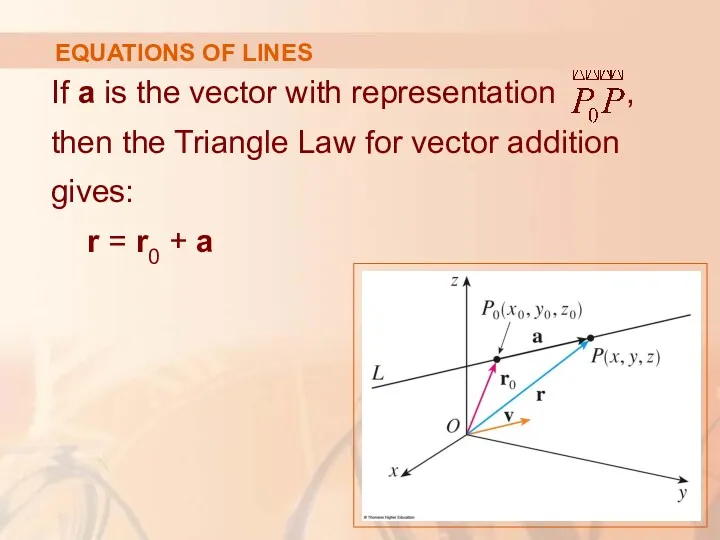
If a is the vector with representation ,
then
EQUATIONS OF LINES
If a is the vector with representation , then
EQUATIONS OF LINES
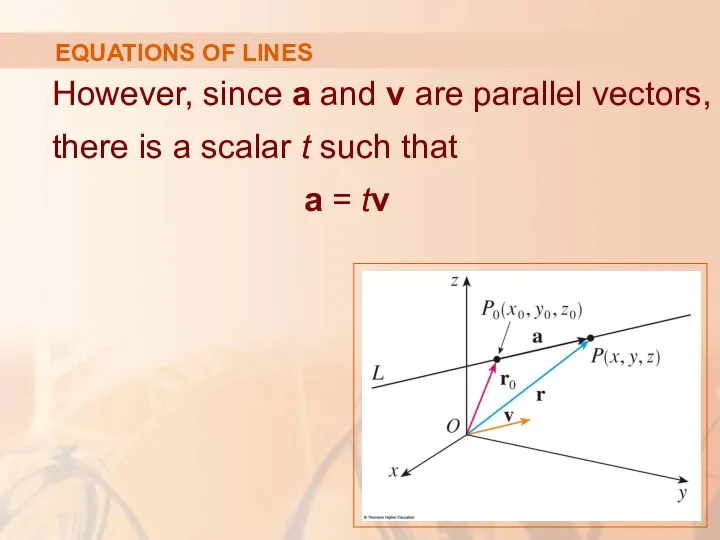
However, since a and v are parallel vectors, there
EQUATIONS OF LINES
However, since a and v are parallel vectors, there
VECTOR EQUATION OF A LINE
Thus,
r = r0 + t v
This
VECTOR EQUATION OF A LINE
Thus,
r = r0 + t v
This
VECTOR EQUATION
Each value of the parameter t gives
the position vector
VECTOR EQUATION
Each value of the parameter t gives the position vector
VECTOR EQUATION
Positive values of t correspond to points on L that
VECTOR EQUATION
Positive values of t correspond to points on L that
VECTOR EQUATION
If the vector v that gives the direction of
the
VECTOR EQUATION
If the vector v that gives the direction of the
VECTOR EQUATION
We can also write:
r = and
VECTOR EQUATION
We can also write:
r =
VECTOR EQUATION
Two vectors are equal if and only if corresponding components
VECTOR EQUATION
Two vectors are equal if and only if corresponding components
SCALAR EQUATIONS OF A LINE
x = x0 + at
y = y0
SCALAR EQUATIONS OF A LINE
x = x0 + at
y = y0
PARAMETRIC EQUATIONS
These equations are called parametric equations of the line L
PARAMETRIC EQUATIONS
These equations are called parametric equations of the line L
EQUATIONS OF LINES
Find a vector equation and parametric equations for the
EQUATIONS OF LINES
Find a vector equation and parametric equations for the
EQUATIONS OF LINES
Here, r0 = <5, 1, 3> = 5 i
EQUATIONS OF LINES
Here, r0 = <5, 1, 3> = 5 i
EQUATIONS OF LINES
Parametric equations are:
x = 5 + t y
EQUATIONS OF LINES
Parametric equations are: x = 5 + t y
EQUATIONS OF LINES
Choosing the parameter value t = 1
gives x
EQUATIONS OF LINES
Choosing the parameter value t = 1 gives x
EQUATIONS OF LINES
The vector equation and parametric equations of a line
EQUATIONS OF LINES
The vector equation and parametric equations of a line
EQUATIONS OF LINES
For instance, if, instead of (5, 1, 3),
we choose
EQUATIONS OF LINES
For instance, if, instead of (5, 1, 3), we choose
EQUATIONS OF LINES
Alternatively, if we stay with the point (5, 1,
EQUATIONS OF LINES
Alternatively, if we stay with the point (5, 1,

DIRECTION NUMBERS
In general, if a vector v =
DIRECTION NUMBERS
In general, if a vector v =
DIRECTION NUMBERS
Any vector parallel to v could also be used.
Thus, we
DIRECTION NUMBERS
Any vector parallel to v could also be used.
Thus, we
EQUATIONS OF LINES
Another way of describing a line L
is to
EQUATIONS OF LINES
Another way of describing a line L is to
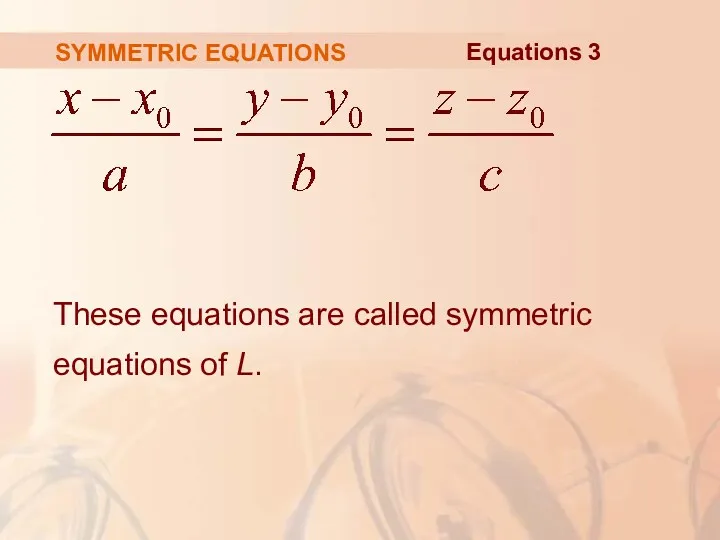
SYMMETRIC EQUATIONS
These equations are called symmetric equations of L.
Equations 3
SYMMETRIC EQUATIONS
These equations are called symmetric equations of L.
Equations 3
SYMMETRIC EQUATIONS
Notice that the numbers a, b, and c that appear
SYMMETRIC EQUATIONS
Notice that the numbers a, b, and c that appear
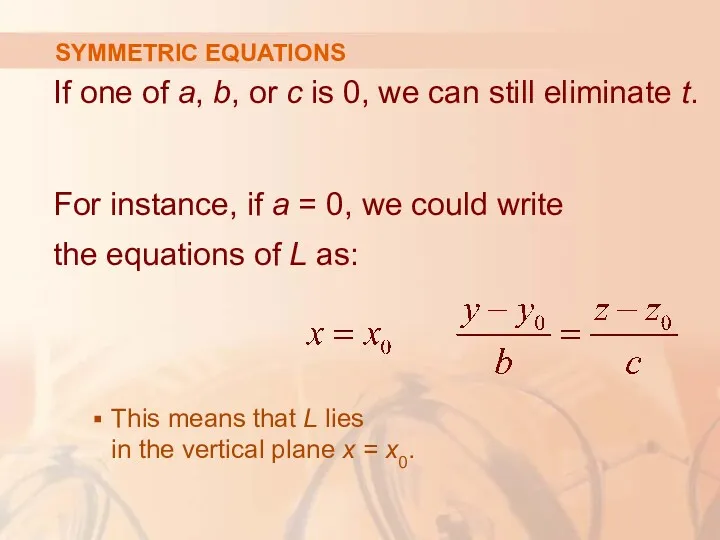
SYMMETRIC EQUATIONS
If one of a, b, or c is 0, we
SYMMETRIC EQUATIONS
If one of a, b, or c is 0, we
EQUATIONS OF LINES
Find parametric equations and symmetric equations of the line
EQUATIONS OF LINES
Find parametric equations and symmetric equations of the line
EQUATIONS OF LINES
We are not explicitly given a vector parallel
to
EQUATIONS OF LINES
We are not explicitly given a vector parallel to
EQUATIONS OF LINES
Thus, direction numbers are:
a = 1, b = –5,
EQUATIONS OF LINES
Thus, direction numbers are:
a = 1, b = –5,
EQUATIONS OF LINES
Taking the point (2, 4, –3) as P0,
we
EQUATIONS OF LINES
Taking the point (2, 4, –3) as P0, we
EQUATIONS OF LINES
The line intersects the xy-plane when z = 0.
So,
EQUATIONS OF LINES
The line intersects the xy-plane when z = 0.
So,
EQUATIONS OF LINES
The line intersects the xy-plane
at the point
Example 2
EQUATIONS OF LINES
The line intersects the xy-plane
at the point
Example 2
EQUATIONS OF LINES
In general, the procedure of Example 2 shows that
EQUATIONS OF LINES
In general, the procedure of Example 2 shows that
EQUATIONS OF LINE SEGMENTS
Often, we need a description, not of
an
EQUATIONS OF LINE SEGMENTS
Often, we need a description, not of an
EQUATIONS OF LINE SEGMENTS
If we put t = 0 in the
EQUATIONS OF LINE SEGMENTS
If we put t = 0 in the
EQUATIONS OF LINE SEGMENTS
So, the line segment AB is described by
EQUATIONS OF LINE SEGMENTS
So, the line segment AB is described by
EQUATIONS OF LINE SEGMENTS
In general, we know from Equation 1 that
EQUATIONS OF LINE SEGMENTS
In general, we know from Equation 1 that
EQUATIONS OF LINE SEGMENTS
If the line also passes through (the tip
EQUATIONS OF LINE SEGMENTS
If the line also passes through (the tip
EQUATIONS OF LINE SEGMENTS
The line segment from r0 to r1 is
EQUATIONS OF LINE SEGMENTS
The line segment from r0 to r1 is
EQUATIONS OF LINE SEGMENTS
Show that the lines L1 and L2 with
EQUATIONS OF LINE SEGMENTS
Show that the lines L1 and L2 with
EQUATIONS OF LINE SEGMENTS
The lines are not parallel because
the corresponding
EQUATIONS OF LINE SEGMENTS
The lines are not parallel because the corresponding
EQUATIONS OF LINE SEGMENTS
If L1 and L2 had a point of
EQUATIONS OF LINE SEGMENTS
If L1 and L2 had a point of
EQUATIONS OF LINE SEGMENTS
However, if we solve the first two equations,
EQUATIONS OF LINE SEGMENTS
However, if we solve the first two equations,
EQUATIONS OF LINE SEGMENTS
Thus, there are no values of t and
EQUATIONS OF LINE SEGMENTS
Thus, there are no values of t and
EQUATIONS OF LINE SEGMENTS
Hence, L1 and L2 are skew lines.
Example
EQUATIONS OF LINE SEGMENTS
Hence, L1 and L2 are skew lines.
Example
PLANES
Although a line in space is determined by
a point and
PLANES
Although a line in space is determined by a point and
PLANES
However, a vector perpendicular
to the plane does completely specify
its
PLANES
However, a vector perpendicular to the plane does completely specify its
PLANES
Thus, a plane in space is determined
by:
A point P0(x0, y0,
PLANES
Thus, a plane in space is determined
by:
A point P0(x0, y0,
NORMAL VECTOR
This orthogonal vector n is called
a normal vector.
NORMAL VECTOR
This orthogonal vector n is called
a normal vector.
PLANES
Let P(x, y, z) be an arbitrary point in the plane.
Let
PLANES
Let P(x, y, z) be an arbitrary point in the plane.
Let
PLANES
The normal vector n is orthogonal to every vector in the
PLANES
The normal vector n is orthogonal to every vector in the
EQUATIONS OF PLANES
Thus, we have: n . (r – r0) =
EQUATIONS OF PLANES
Thus, we have: n . (r – r0) =
EQUATIONS OF PLANES
That can also be written as:
n . r
EQUATIONS OF PLANES
That can also be written as: n . r
VECTOR EQUATION
Either Equation 5 or Equation 6
is called a vector
VECTOR EQUATION
Either Equation 5 or Equation 6 is called a vector
EQUATIONS OF PLANES
To obtain a scalar equation for the plane,
we
EQUATIONS OF PLANES
To obtain a scalar equation for the plane, we
EQUATIONS OF PLANES
Then, the vector Equation 5
becomes:
EQUATIONS OF PLANES
Then, the vector Equation 5
becomes:
SCALAR EQUATION
That can also be written as:
a(x – x0) + b(y
SCALAR EQUATION
That can also be written as:
a(x – x0) + b(y
EQUATIONS OF PLANES
Find an equation of the plane through
the point
EQUATIONS OF PLANES
Find an equation of the plane through the point
EQUATIONS OF PLANES
In Equation 7, putting
a = 2, b
EQUATIONS OF PLANES
In Equation 7, putting
a = 2, b
EQUATIONS OF PLANES
To find the x-intercept, we set y = z
EQUATIONS OF PLANES
To find the x-intercept, we set y = z
EQUATIONS OF PLANES
This enables us to sketch the portion
of the
EQUATIONS OF PLANES
This enables us to sketch the portion of the
EQUATIONS OF PLANES
By collecting terms in Equation 7
as we did
EQUATIONS OF PLANES
By collecting terms in Equation 7 as we did
LINEAR EQUATION
ax + by + cz + d = 0
where d
LINEAR EQUATION
ax + by + cz + d = 0
where d
LINEAR EQUATION
Conversely, it can be shown that, if
a, b, and
LINEAR EQUATION
Conversely, it can be shown that, if a, b, and
EQUATIONS OF PLANES
Find an equation of the plane that passes through
EQUATIONS OF PLANES
Find an equation of the plane that passes through
EQUATIONS OF PLANES
The vectors a and b corresponding to and are:
a
EQUATIONS OF PLANES
The vectors a and b corresponding to and are:
a
EQUATIONS OF PLANES
Since both a and b lie in the plane,
EQUATIONS OF PLANES
Since both a and b lie in the plane,
EQUATIONS OF PLANES
Thus,
Example 5
EQUATIONS OF PLANES
Thus,
Example 5
EQUATIONS OF PLANES
With the point P(1, 2, 3) and the normal
EQUATIONS OF PLANES
With the point P(1, 2, 3) and the normal
EQUATIONS OF PLANES
Find the point at which the line with
parametric
EQUATIONS OF PLANES
Find the point at which the line with parametric
EQUATIONS OF PLANES
We substitute the expressions for x, y, and z
EQUATIONS OF PLANES
We substitute the expressions for x, y, and z
EQUATIONS OF PLANES
That simplifies to –10t = 20.
Hence, t = –2.
Therefore,
EQUATIONS OF PLANES
That simplifies to –10t = 20.
Hence, t = –2.
Therefore,
EQUATIONS OF PLANES
Then,
x = 2 + 3(–2) = –4
EQUATIONS OF PLANES
Then,
x = 2 + 3(–2) = –4
PARALLEL PLANES
Two planes are parallel
if their normal vectors are
parallel.
PARALLEL PLANES
Two planes are parallel if their normal vectors are parallel.
PARALLEL PLANES
For instance, the planes
x + 2y – 3z =
PARALLEL PLANES
For instance, the planes
x + 2y – 3z =
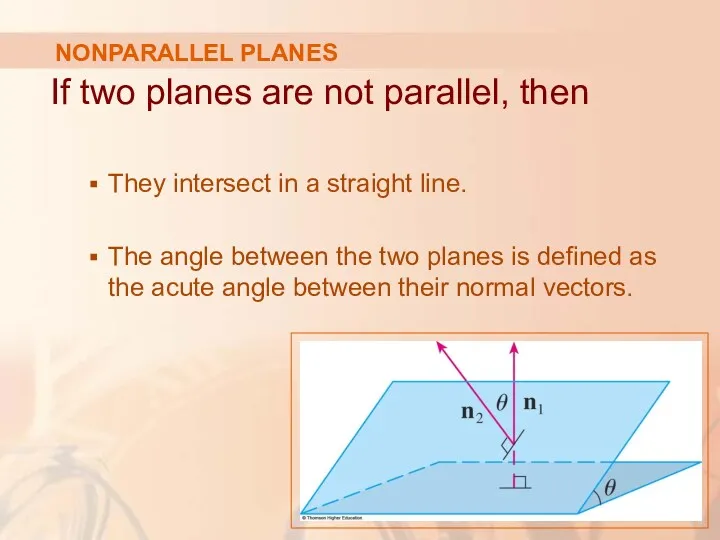
NONPARALLEL PLANES
If two planes are not parallel, then
They intersect in a
NONPARALLEL PLANES
If two planes are not parallel, then
They intersect in a
EQUATIONS OF PLANES
Find the angle between the planes
x + y
EQUATIONS OF PLANES
Find the angle between the planes x + y
EQUATIONS OF PLANES
The normal vectors of these planes
are:
n1 =
EQUATIONS OF PLANES
The normal vectors of these planes are: n1 =
EQUATIONS OF PLANES
So, if θ is the angle between the planes,
EQUATIONS OF PLANES
So, if θ is the angle between the planes,
EQUATIONS OF PLANES
We first need to find a point on L.
EQUATIONS OF PLANES
We first need to find a point on L.
EQUATIONS OF PLANES
As L lies in both planes, it is perpendicular
EQUATIONS OF PLANES
As L lies in both planes, it is perpendicular
EQUATIONS OF PLANES
So, the symmetric equations of L can be written
EQUATIONS OF PLANES
So, the symmetric equations of L can be written
NOTE
A linear equation in x, y, and z represents
a plane.
Also,
NOTE
A linear equation in x, y, and z represents
a plane.
Also,
NOTE
The points (x, y, z) that satisfy both
a1x + b1y
NOTE
The points (x, y, z) that satisfy both
a1x + b1y
NOTE
For instance, in Example 7, the line L
was given as
NOTE
For instance, in Example 7, the line L was given as
NOTE
The symmetric equations that we found for L could be written
NOTE
The symmetric equations that we found for L could be written
NOTE
They exhibit L as the line of intersection
of the planes
NOTE
They exhibit L as the line of intersection of the planes
NOTE
In general, when we write the equations
of a line in
NOTE
In general, when we write the equations of a line in
EQUATIONS OF PLANES
Find a formula for the distance D
from a
EQUATIONS OF PLANES
Find a formula for the distance D from a
EQUATIONS OF PLANES
Let P0(x0, y0, z0) be any point in the
EQUATIONS OF PLANES
Let P0(x0, y0, z0) be any point in the
EQUATIONS OF PLANES
You can see that the distance D from P1
EQUATIONS OF PLANES
You can see that the distance D from P1
EQUATIONS OF PLANES
Thus,
Example 8
EQUATIONS OF PLANES
Thus,
Example 8
EQUATIONS OF PLANES
Since P0 lies in the plane, its coordinates satisfy
EQUATIONS OF PLANES
Since P0 lies in the plane, its coordinates satisfy
EQUATIONS OF PLANES
Hence, the formula for D can be written
as:
EQUATIONS OF PLANES
Hence, the formula for D can be written as:
EQUATIONS OF PLANES
Find the distance between the parallel planes 10x +
EQUATIONS OF PLANES
Find the distance between the parallel planes 10x +
EQUATIONS OF PLANES
First, we note that the planes are parallel because
EQUATIONS OF PLANES
First, we note that the planes are parallel because
EQUATIONS OF PLANES
To find the distance D between the planes,
we
EQUATIONS OF PLANES
To find the distance D between the planes, we
EQUATIONS OF PLANES
By Formula 9, the distance between (½, 0, 0)
EQUATIONS OF PLANES
By Formula 9, the distance between (½, 0, 0)
EQUATIONS OF PLANES
In Example 3, we showed that the lines
L1:
EQUATIONS OF PLANES
In Example 3, we showed that the lines L1:
EQUATIONS OF PLANES
Since the two lines L1 and L2 are skew,
EQUATIONS OF PLANES
Since the two lines L1 and L2 are skew,
EQUATIONS OF PLANES
The common normal vector to both planes must be
EQUATIONS OF PLANES
The common normal vector to both planes must be
EQUATIONS OF PLANES
So, a normal vector is:
Example 10
EQUATIONS OF PLANES
So, a normal vector is:
Example 10
EQUATIONS OF PLANES
If we put s = 0 in the equations
EQUATIONS OF PLANES
If we put s = 0 in the equations
EQUATIONS OF PLANES
If we now set t = 0 in the
EQUATIONS OF PLANES
If we now set t = 0 in the
EQUATIONS OF PLANES
So, the distance between L1 and L2
is the
EQUATIONS OF PLANES
So, the distance between L1 and L2 is the
 Числовые наборы. Среднее арифметическое
Числовые наборы. Среднее арифметическое Производная функции
Производная функции Взаимное расположение прямой и плоскости
Взаимное расположение прямой и плоскости Математика вокруг нас. Орнаменты и узоры на посуде
Математика вокруг нас. Орнаменты и узоры на посуде Теорема Пифагора. Пифагор Самосский
Теорема Пифагора. Пифагор Самосский Выражения и их преобразования
Выражения и их преобразования Задачи по готовым чертежам Трапеция
Задачи по готовым чертежам Трапеция Розв’язування задач за допомогою теореми Піфагора
Розв’язування задач за допомогою теореми Піфагора Презентацияурок математики 1 класс( Космическое путешествие ) .
Презентацияурок математики 1 класс( Космическое путешествие ) . Степень числа. Тайны степени
Степень числа. Тайны степени Сложение и вычитание дробей. Проверочная работа
Сложение и вычитание дробей. Проверочная работа Множества. Отношения между множествами
Множества. Отношения между множествами Методическая разработка урок математики Единицы длины 3 класс
Методическая разработка урок математики Единицы длины 3 класс Путешествие во времени. Проект в рамках образовательного события.
Путешествие во времени. Проект в рамках образовательного события. Случаи сложения вида +6
Случаи сложения вида +6 Нумерация чисел от 1 до 100. Тест
Нумерация чисел от 1 до 100. Тест Занимательная математика (3 класс)
Занимательная математика (3 класс) Урок математики в 1 классе по теме Число и цифра 10 УМК Начальная школа XXI века
Урок математики в 1 классе по теме Число и цифра 10 УМК Начальная школа XXI века Математика, 3 класс. Устный счёт
Математика, 3 класс. Устный счёт Построение сечений многогранников
Построение сечений многогранников Умножение многочлена на одночлен
Умножение многочлена на одночлен 4 класс Работа с многозначными числами. Порядок выполнения действий
4 класс Работа с многозначными числами. Порядок выполнения действий Дифференциальные уравнения и их применение в медицинской практике
Дифференциальные уравнения и их применение в медицинской практике Проценты в школьном курсе математики
Проценты в школьном курсе математики Презентация Геометрические фигуры
Презентация Геометрические фигуры Ділення виду 360 : 3. Задача, обернена до задачі на знаходження суми двох добутків. Розв’язування рівнянь
Ділення виду 360 : 3. Задача, обернена до задачі на знаходження суми двох добутків. Розв’язування рівнянь Банк мультимедийных презентаций по ФЭМП
Банк мультимедийных презентаций по ФЭМП Микрокалькулятор. 5 класс
Микрокалькулятор. 5 класс