- Противопожарная сигнализация. Центр робототехники и интеллектуальных систем, ПГНИУ

Содержание
- 2. Что сегодня изучим? Основы работы с Ардуино Как работает микроконтроллер Делитель напряжения Фоторезистор Терморезистор Светодиод Зуммер
- 3. Робототехника как таковая Робот должен уметь: Распознавать Принимать решения Действовать Разделяют: Бытовые роботы Научные роботы Промышленные
- 4. Основные элементы и принципы Система распознавания Микроконтроллер Действующая система Система управления
- 5. Микроконтроллер Arduino
- 6. Компоненты. Макетная плата и соединительные провода
- 7. Компоненты. Резисторы
- 8. Компоненты. Светодиоды
- 9. Компоненты. Фоторезистор
- 10. Компоненты. Терморезистор
- 11. Компоненты. Зуммер
- 12. Arduino IDE
- 13. Arduino IDE
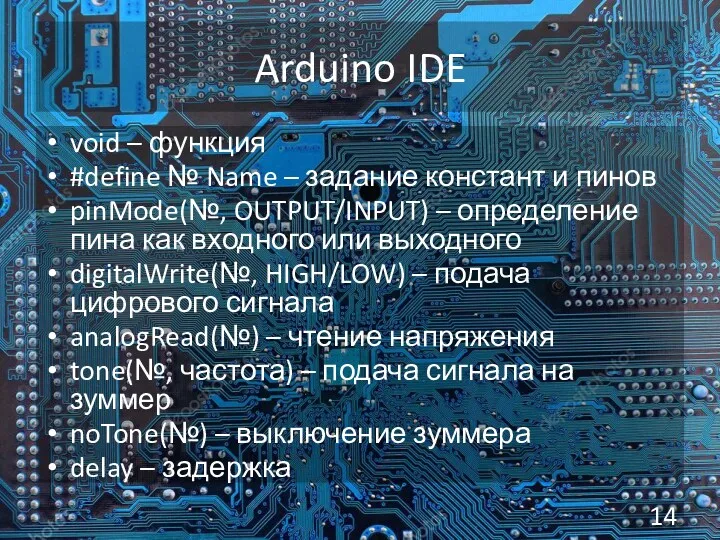
- 14. Arduino IDE void – функция #define № Name – задание констант и пинов pinMode(№, OUTPUT/INPUT) –
- 16. Операторы Арифметические +, -, *, /, =, % Сравнения ==, !=, , = Логические && -
- 17. If if (pinFiveInput // действие A } else { // действие B }
- 18. For for (int i=0; i analogWrite(PWMpin, i); delay(10); }
- 19. Case switch (var) { case 1: //выполняется, когда var равно 1 break; case 2: //выполняется когда
- 20. While while(выражение){ // оператор(ы) } do { // последовательность операторов } while (проверка условия);
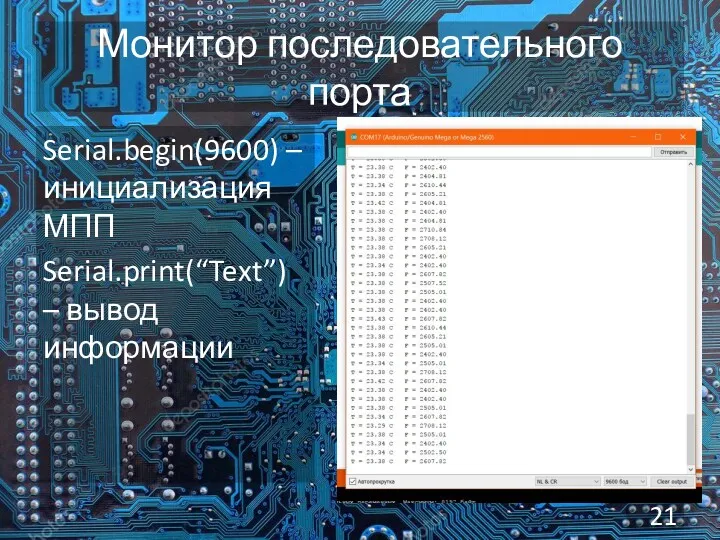
- 21. Монитор последовательного порта Serial.begin(9600) – инициализация МПП Serial.print(“Text”) – вывод информации
- 22. Делитель напряжения
- 23. Схема
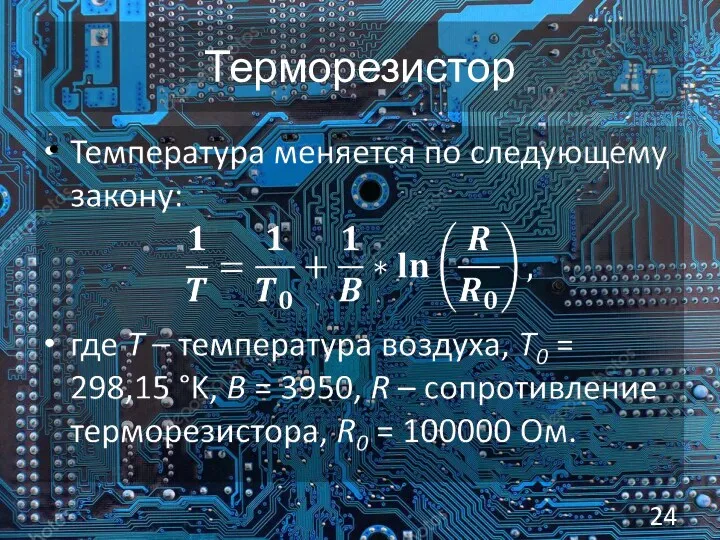
- 24. Терморезистор
- 25. Код #define LPin 7 #define ZPin 2 #define TPin A0 #define FPin A1 float R2 =
- 27. Скачать презентацию
Что сегодня изучим?
Основы работы с Ардуино
Как работает микроконтроллер
Делитель напряжения
Фоторезистор
Терморезистор
Светодиод
Зуммер
Что сегодня изучим?
Основы работы с Ардуино
Как работает микроконтроллер
Делитель напряжения
Фоторезистор
Терморезистор
Светодиод
Зуммер
Робототехника как таковая
Робот должен уметь:
Распознавать
Принимать решения
Действовать
Разделяют:
Бытовые роботы
Научные роботы
Промышленные роботы
Робототехника как таковая
Робот должен уметь:
Распознавать
Принимать решения
Действовать
Разделяют:
Бытовые роботы
Научные роботы
Промышленные роботы

Основные элементы и принципы
Система распознавания
Микроконтроллер
Действующая система
Система управления
Основные элементы и принципы
Система распознавания
Микроконтроллер
Действующая система
Система управления

Микроконтроллер Arduino
Микроконтроллер Arduino
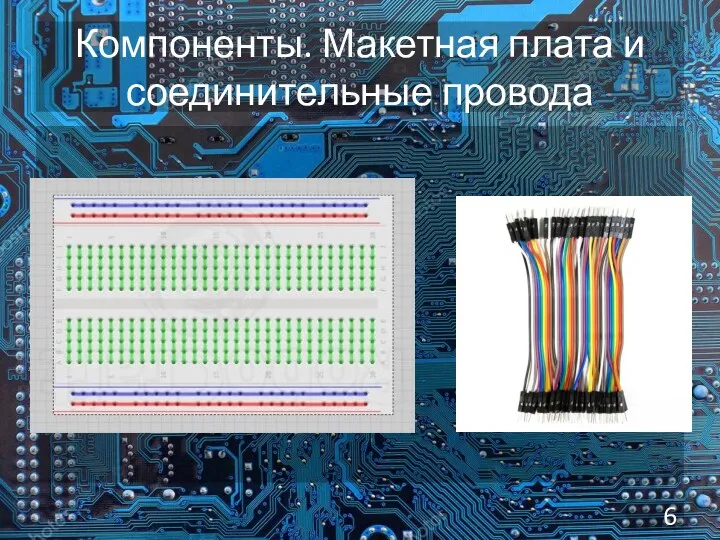
Компоненты. Макетная плата и соединительные провода
Компоненты. Макетная плата и соединительные провода

Компоненты. Резисторы
Компоненты. Резисторы

Компоненты. Светодиоды
Компоненты. Светодиоды
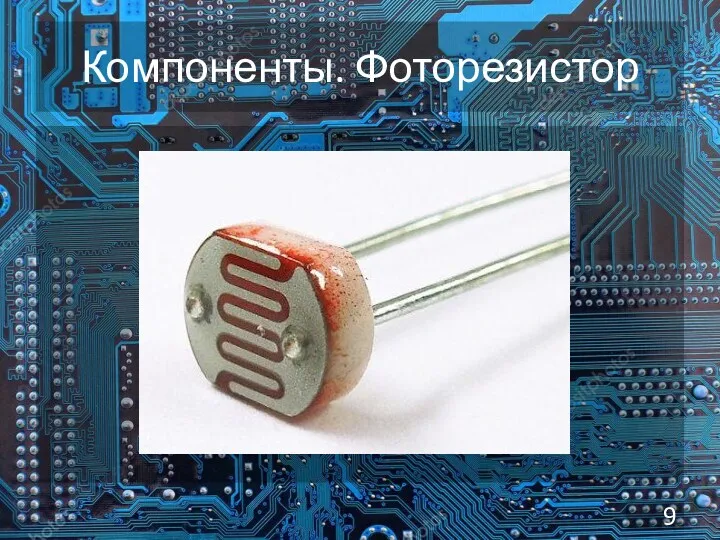
Компоненты. Фоторезистор
Компоненты. Фоторезистор
Компоненты. Терморезистор
Компоненты. Терморезистор

Компоненты. Зуммер
Компоненты. Зуммер
Arduino IDE
Arduino IDE
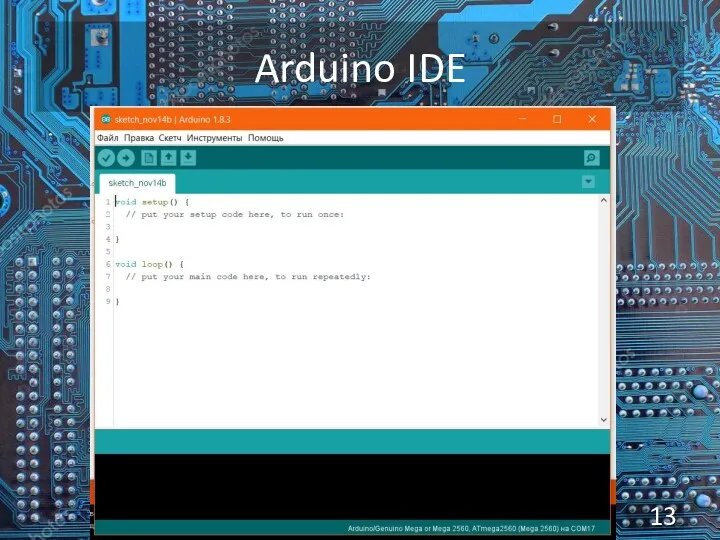
Arduino IDE
Arduino IDE
Arduino IDE
void – функция
#define № Name – задание констант и пинов
pinMode(№,
Arduino IDE
void – функция
#define № Name – задание констант и пинов
pinMode(№,

Операторы
Арифметические
+, -, *, /, =, %
Сравнения
==, !=, <, >,
Операторы
Арифметические
+, -, *, /, =, %
Сравнения
==, !=, <, >,
If
if (pinFiveInput < 500) {
// действие A
}
else
If
if (pinFiveInput < 500) {
// действие A
}
else
For
for (int i=0; i <= 255; i++){
analogWrite(PWMpin, i);
delay(10);
For
for (int i=0; i <= 255; i++){
analogWrite(PWMpin, i);
delay(10);
Case
switch (var) {
case 1:
//выполняется, когда var равно 1
Case
switch (var) {
case 1:
//выполняется, когда var равно 1
While
while(выражение){
// оператор(ы)
}
do
{
// последовательность операторов
}
While
while(выражение){
// оператор(ы)
}
do
{
// последовательность операторов
}
Монитор последовательного порта
Serial.begin(9600) – инициализация МПП
Serial.print(“Text”) – вывод информации
Монитор последовательного порта
Serial.begin(9600) – инициализация МПП
Serial.print(“Text”) – вывод информации
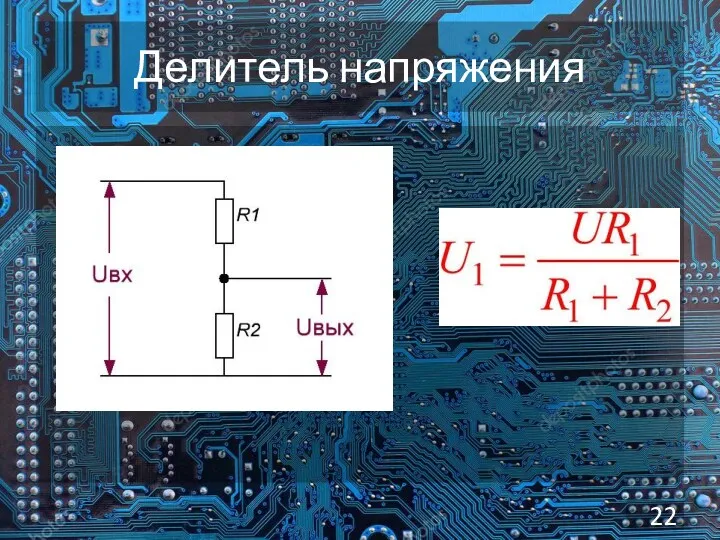
Делитель напряжения
Делитель напряжения
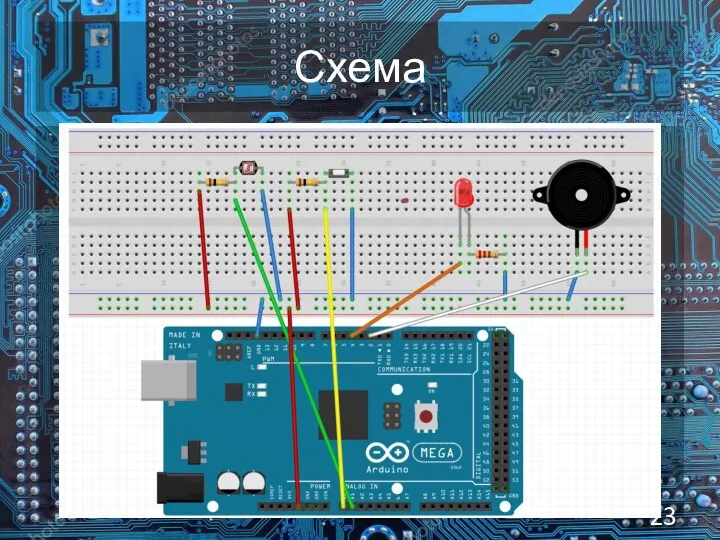
Схема
Схема
Терморезистор
Терморезистор
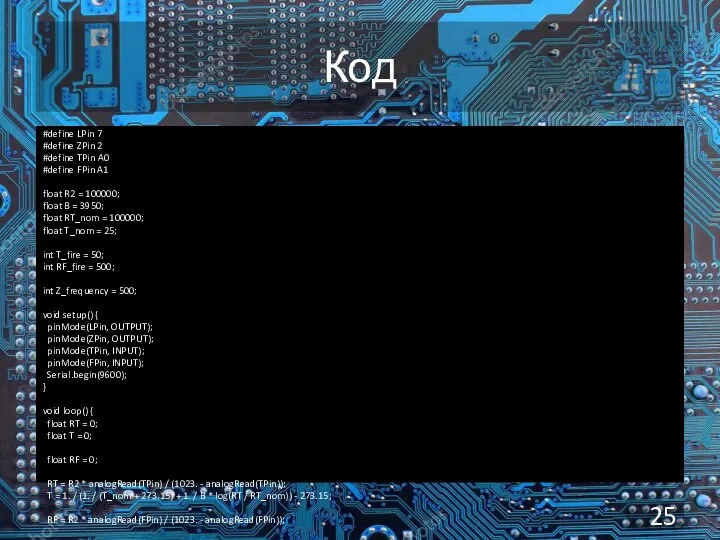
Код
#define LPin 7
#define ZPin 2
#define TPin A0
#define FPin A1
float R2 =
Код
#define LPin 7
#define ZPin 2
#define TPin A0
#define FPin A1
float R2 =
 Звук. Влияние звука и шума на организм человека
Звук. Влияние звука и шума на организм человека Проект Путешествие в страну дорожных знаков
Проект Путешествие в страну дорожных знаков Вплив мін і ВЗВ
Вплив мін і ВЗВ Санитарно-гигиенические нормы при работе за компьютером
Санитарно-гигиенические нормы при работе за компьютером Учимся быть пешеходами. Дорожные знаки
Учимся быть пешеходами. Дорожные знаки Пожарная безопасность
Пожарная безопасность Основные мероприятия, проводимые в РФ по защите населения от ЧС мирного и военного времени. Мониторинг и прогнозирование ЧС
Основные мероприятия, проводимые в РФ по защите населения от ЧС мирного и военного времени. Мониторинг и прогнозирование ЧС Принципы, методы и средства обеспечения безопасности работающих
Принципы, методы и средства обеспечения безопасности работающих Мы выбираем жизнь без наркотиков
Мы выбираем жизнь без наркотиков Издания МЧС России
Издания МЧС России Правила безопасного поведения на железнодорожном транспорте
Правила безопасного поведения на железнодорожном транспорте Школа безопасности. Терроризм – угроза миру
Школа безопасности. Терроризм – угроза миру Безопасность глазами детей
Безопасность глазами детей Дорожные условия и безопасность движения
Дорожные условия и безопасность движения Безопасный интернет
Безопасный интернет История противогазов и их разновидности
История противогазов и их разновидности Игра про правила дорожного движения для детей 3-4 лет
Игра про правила дорожного движения для детей 3-4 лет Быт и безопасность. 5 класс (1)
Быт и безопасность. 5 класс (1) Безопасное колесо. Знатоки правил дорожного движения
Безопасное колесо. Знатоки правил дорожного движения Опасности весны
Опасности весны презентация у уроку ОБЖ в коррекционной школе VIII вида в 4-5 классе по теме:Безопасность на транспорте
презентация у уроку ОБЖ в коррекционной школе VIII вида в 4-5 классе по теме:Безопасность на транспорте Профилактика детского травматизма на дорогах
Профилактика детского травматизма на дорогах Вредные вещества воздуха рабочей зоны (запыленность и загазованность)
Вредные вещества воздуха рабочей зоны (запыленность и загазованность) Жеке қорғаныс құралдары
Жеке қорғаныс құралдары Регистрация опасных производственных объектов
Регистрация опасных производственных объектов Занятие по дисциплине Транспортная безопасность
Занятие по дисциплине Транспортная безопасность Правила безопасности на воде в осенне-зимний период
Правила безопасности на воде в осенне-зимний период В здоровом теле, здоровый дух
В здоровом теле, здоровый дух