- A step towards data orientation

Содержание
- 2. AI decision making - Pathfinding - Animation Look at actual code & patterns Questions AGENDA
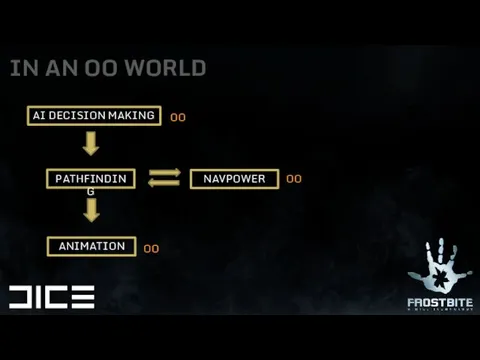
- 3. IN AN OO WORLD AI DECISION MAKING PATHFINDING ANIMATION NAVPOWER OO OO OO
- 4. DECISION TO MOVEMENT
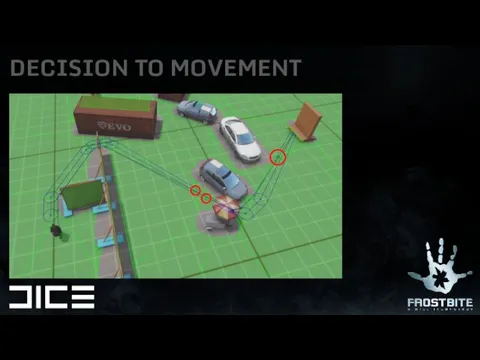
- 5. DECISION TO MOVEMENT
- 6. DECISION TO MOVEMENT
- 7. DECISION TO MOVEMENT
- 8. DECISION TO MOVEMENT
- 9. Find path Load / unload nav mesh section Add / remove obstacles Path invalidation detection Can
- 10. Pathfinder - find path, path invalidation, circle tests, raycasts Random position generator - can go-tests Manager
- 11. interface Pathfinder { public: virtual PathHandle* findPath(const PathfindingPosition& start, const PathfindingPosition& end, Optional corridorRadius, PathHandle::StateListener* listener)
- 12. PATH HANDLE typedef fixed_vector WaypointVector; typedef fixed_vector WaypointRadiusVector; struct PathHandle { enum State {ComputingPath, ValidPath, NoPathAvailable,
- 13. PATH HANDLE typedef eastl::fixed_vector WaypointVector; typedef eastl::fixed_vector WaypointRadiusVector; struct PathHandle { enum State {ComputingPath, ValidPath, NoPathAvailable,
- 14. class NavPowerPathfinder : public Pathfinder { public: virtual PathHandle* findPath(...) override; virtual PathHandle* findPathFromDestination(...) override; virtual
- 15. typedef eastl::vector Corridor; ScratchPadArena scratch; Corridor corridor(scratch); corridor.resize(navPowerPath.size()); // Will allocate memory using the scratch pad
- 16. const CorridorHandleVector::iterator allBegin = all.begin(), allEnd = all.end(); const CorridorHandlePtrVector::iterator adjustBegin = adjust.begin(), adjustEnd = adjust.end();
- 17. NAVPOWER MANAGER void NavPowerManager::update(float frameTime) { m_streamingManager.update(); m_destructionManager.update(); m_obstacleManager.update(); bfx::SystemSimulate( frameTime ); for (PathfinderVector::const_iterator it=m_pathfinders.begin(), ...)
- 18. Keep pathfinding code/data cache hot Avoid call sites cache running cold Easier to jobify / SPUify
- 19. Manager Random position generator Pathfinder ASYNCHRONOUS Collect destruction messages, process in batch Runs ~1/sec. Allows synchronous
- 20. LESS SIMPLIFIED ARCHITECTURE LOCOMOTION PATHFINDING DRIVING LOCOMOTION ANIMATION SCRIPTING SERVER CLIENT VEHICLE INPUT PATH FOLLOWING AI
- 21. Each server tick 1. Each AI decision making 2. Pathfinding manager update All pathfinding requests All
- 22. Callbacks. Delay? Fire in batch? Handle+poll instead of callbacks. Poll in batch. Record messages, process all
- 23. RESOLVE EARLY void Bot::changeVehicle(const ServerEntryComponent* entry) { ... m_pathFollower = entry->owner()-> getFirstComponentOfType ()->getPathFollower(); }
- 24. new / push_back() / insert() / resize() Stop and think! Where is the memory allocated? Pre-allocated
- 25. Let’s not abandon OO nor rewrite the world Start small, batch a bit, resolve inputs, avoid
- 26. AI decision making – pathfinding – animation Code: Handles, arena, scratch pad, fixed_vector, batch processing Latency
- 28. Скачать презентацию
AI decision making - Pathfinding - Animation
Look at actual code &
AI decision making - Pathfinding - Animation
Look at actual code &
IN AN OO WORLD
AI DECISION MAKING
PATHFINDING
ANIMATION
NAVPOWER
OO
OO
OO
IN AN OO WORLD
AI DECISION MAKING
PATHFINDING
ANIMATION
NAVPOWER
OO
OO
OO

DECISION TO MOVEMENT
DECISION TO MOVEMENT
DECISION TO MOVEMENT
DECISION TO MOVEMENT
DECISION TO MOVEMENT
DECISION TO MOVEMENT
DECISION TO MOVEMENT
DECISION TO MOVEMENT
DECISION TO MOVEMENT
DECISION TO MOVEMENT
Find path
Load / unload nav mesh section
Add / remove obstacles
Path invalidation
Find path
Load / unload nav mesh section
Add / remove obstacles
Path invalidation
Pathfinder - find path, path invalidation, circle tests, raycasts
Random position generator
Pathfinder - find path, path invalidation, circle tests, raycasts
Random position generator
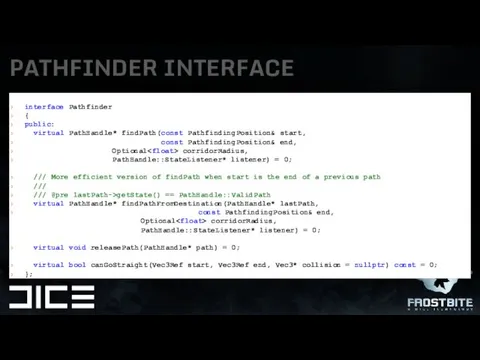
interface Pathfinder
{
public:
virtual PathHandle* findPath(const PathfindingPosition& start,
const PathfindingPosition& end,
{
public:
virtual PathHandle* findPath(const PathfindingPosition& start,
const PathfindingPosition& end,

PATH HANDLE
typedef fixed_vector WaypointVector;
typedef fixed_vector WaypointRadiusVector;
struct PathHandle
{
enum State {ComputingPath,
PATH HANDLE
typedef fixed_vector
typedef fixed_vector
struct PathHandle
{
enum State {ComputingPath,

PATH HANDLE
typedef eastl::fixed_vector WaypointVector;
typedef eastl::fixed_vector WaypointRadiusVector;
struct PathHandle
{
enum State {ComputingPath,
PATH HANDLE
typedef eastl::fixed_vector
typedef eastl::fixed_vector
struct PathHandle
{
enum State {ComputingPath,
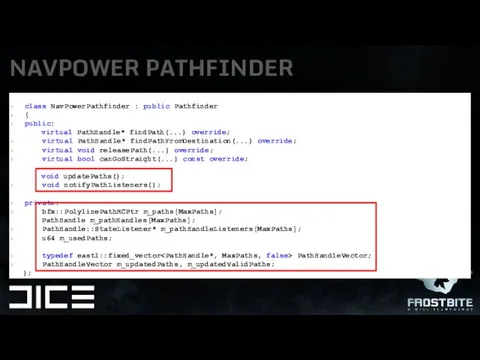
class NavPowerPathfinder : public Pathfinder
{
public:
virtual PathHandle* findPath(...) override;
virtual
{
public:
virtual PathHandle* findPath(...) override;
virtual
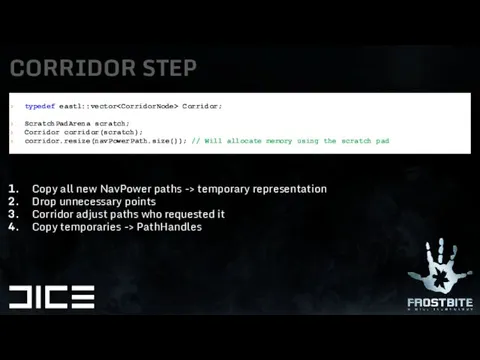
typedef eastl::vector Corridor;
ScratchPadArena scratch;
Corridor corridor(scratch);
corridor.resize(navPowerPath.size()); // Will allocate memory using the
ScratchPadArena scratch;
Corridor corridor(scratch);
corridor.resize(navPowerPath.size()); // Will allocate memory using the
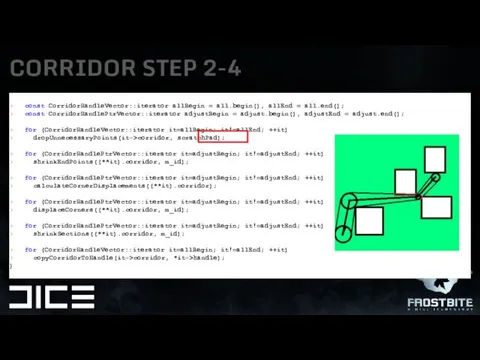
const CorridorHandleVector::iterator allBegin = all.begin(), allEnd = all.end();
const CorridorHandlePtrVector::iterator adjustBegin =
const CorridorHandlePtrVector::iterator adjustBegin =
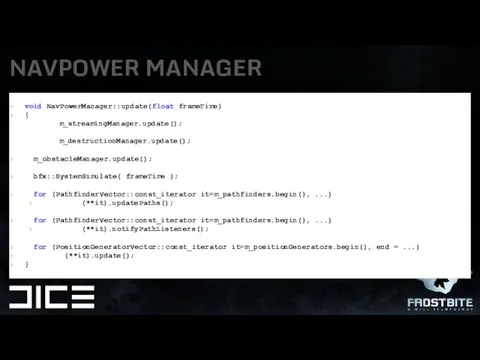
NAVPOWER MANAGER
void NavPowerManager::update(float frameTime)
{
m_streamingManager.update();
m_destructionManager.update();
m_obstacleManager.update();
bfx::SystemSimulate( frameTime );
for (PathfinderVector::const_iterator it=m_pathfinders.begin(),
NAVPOWER MANAGER
void NavPowerManager::update(float frameTime)
{
m_streamingManager.update();
m_destructionManager.update();
m_obstacleManager.update();
bfx::SystemSimulate( frameTime );
for (PathfinderVector::const_iterator it=m_pathfinders.begin(),
Keep pathfinding code/data cache hot
Avoid call sites cache running cold
Easier to
Keep pathfinding code/data cache hot
Avoid call sites cache running cold
Easier to
Manager
Random position generator
Pathfinder
ASYNCHRONOUS
Collect destruction messages, process in batch
Runs ~1/sec.
Manager
Random position generator
Pathfinder
ASYNCHRONOUS
Collect destruction messages, process in batch
Runs ~1/sec.
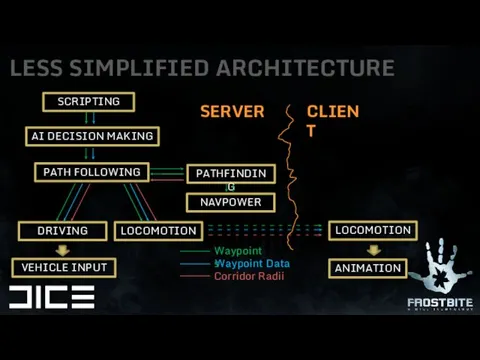
LESS SIMPLIFIED ARCHITECTURE
LOCOMOTION
PATHFINDING
DRIVING
LOCOMOTION
ANIMATION
SCRIPTING
SERVER
CLIENT
VEHICLE INPUT
PATH FOLLOWING
AI DECISION MAKING
NAVPOWER
Waypoint Data
Corridor Radii
Waypoints
LESS SIMPLIFIED ARCHITECTURE
LOCOMOTION
PATHFINDING
DRIVING
LOCOMOTION
ANIMATION
SCRIPTING
SERVER
CLIENT
VEHICLE INPUT
PATH FOLLOWING
AI DECISION MAKING
NAVPOWER
Waypoint Data
Corridor Radii
Waypoints

Each server tick
1. Each AI decision making
2. Pathfinding manager update
All pathfinding
Each server tick
1. Each AI decision making
2. Pathfinding manager update
All pathfinding
Callbacks. Delay? Fire in batch?
Handle+poll instead of callbacks. Poll in batch.
Record
Callbacks. Delay? Fire in batch?
Handle+poll instead of callbacks. Poll in batch.
Record
RESOLVE EARLY
void Bot::changeVehicle(const ServerEntryComponent* entry)
{
...
m_pathFollower = entry->owner()->
getFirstComponentOfType()->getPathFollower();
}
RESOLVE EARLY
void Bot::changeVehicle(const ServerEntryComponent* entry)
{
...
m_pathFollower = entry->owner()->
getFirstComponentOfType
}
new / push_back() / insert() / resize()
Stop and think!
Where is
new / push_back() / insert() / resize()
Stop and think!
Where is
Let’s not abandon OO nor rewrite the world
Start small, batch a
Let’s not abandon OO nor rewrite the world
Start small, batch a
AI decision making – pathfinding – animation
Code: Handles, arena, scratch pad,
AI decision making – pathfinding – animation
Code: Handles, arena, scratch pad,
 Организация работы с детьми группы риска
Организация работы с детьми группы риска Архитектурное проектирование. Реконструкция городской среды с разработкой градостроительного узла
Архитектурное проектирование. Реконструкция городской среды с разработкой градостроительного узла Числа - великаны
Числа - великаны Нейропсихологические синдромы поражения конвекситальной коры височной области мозга
Нейропсихологические синдромы поражения конвекситальной коры височной области мозга ООценка кинических рекомендаций по невропатии лицевого нерва 2013 года с использованием инструмента agree. Область применения
ООценка кинических рекомендаций по невропатии лицевого нерва 2013 года с использованием инструмента agree. Область применения Специфика разработки стратегии предприятия
Специфика разработки стратегии предприятия Використання інноваційних технологій в роботі учнівського самоврядування
Використання інноваційних технологій в роботі учнівського самоврядування Индия после Второй мировой войны
Индия после Второй мировой войны Тепловые эффекты химических реакций. Энтальпия. Термохимические уравнения
Тепловые эффекты химических реакций. Энтальпия. Термохимические уравнения Современная поэзия 1998-2017
Современная поэзия 1998-2017 Единый кл час
Единый кл час Расчёт загрузки и составление грузового плана судна с проработкой маршрута перехода судна по навигационным картам и пособиям
Расчёт загрузки и составление грузового плана судна с проработкой маршрута перехода судна по навигационным картам и пособиям Опухоли яичников (часть 1)
Опухоли яичников (часть 1) Создание сайта для проведения урока информатики
Создание сайта для проведения урока информатики Правление Владимира Мономаха
Правление Владимира Мономаха А. Блок. Ветхая избушка. Сны. Ворона
А. Блок. Ветхая избушка. Сны. Ворона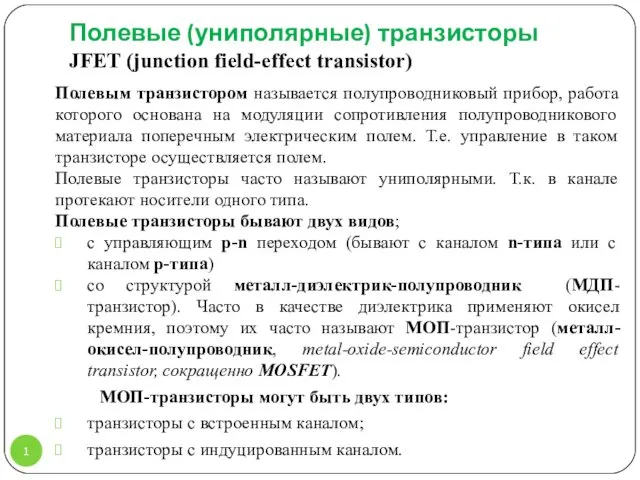 Полевые транзисторы JFET. (Лекция 8)
Полевые транзисторы JFET. (Лекция 8) Российские актеры
Российские актеры GTI Art 1
GTI Art 1 Микроволновая печь
Микроволновая печь Образовательное пространство в соответствии с ФГОС.
Образовательное пространство в соответствии с ФГОС. презентация на тему: Совершенствование системы физкультурно-оздоровительной работы...
презентация на тему: Совершенствование системы физкультурно-оздоровительной работы... Презентация Путешествие в прошлое деревни Кокшамары часть 3
Презентация Путешествие в прошлое деревни Кокшамары часть 3 Мышление и воображение человека
Мышление и воображение человека Презентация методического объединения педагогов Формы привлечения обучающихся в детские объединения
Презентация методического объединения педагогов Формы привлечения обучающихся в детские объединения Как не стать жертвой наркомании
Как не стать жертвой наркомании Площадь прямоугольного треугольника
Площадь прямоугольного треугольника Интегральные утройства. Элементная база РЭС. Основные функции и конструктивно-технологические параметры
Интегральные утройства. Элементная база РЭС. Основные функции и конструктивно-технологические параметры