- Анализ компьютерных средств на этапе проектирования СУ

Содержание
- 2. При выборе того или иного программного продукта необходимо учитывать следующее: − вид математического описания исследуемой электромеханической
- 3. В настоящее время в основе существующих функционально ориентированных методов, направленных на совершенствование методологии программирования, лежит процесс
- 4. Усовершенствованная методика программирования (IPT) является наиболее перспективным подходом к усовершенствованию методологии и технологии программирования с точки
- 5. Для моделирования СУ применяют следующие программные средства: MATLAB («MathWorks, Inc»), GPSS (компания «Minuteman Software» (США)), SCILAB,
- 6. Math Works MATLAB Simulink, VisSim, MBTY, Easy5S относятся к программам с поточной моделью управления (модель программирования,
- 7. Dynast, 20-sim, Dymola, Simplorer, ITI-sim, Pspice, Multisim, Micro-Cap относятся к программам – интерпретаторам систем уравнений. Эти
- 8. Недостатки первой группы моделирующих программ связаны с достоинствами второй, и наоборот. Существует технология построения моделей элементов
- 9. Он не ограничивает количество компонентов моделируемой системы компонентами, поставляемыми разработчиками, – пользователь может создавать свои собственные
- 10. Язык Modelica поддерживает интеграцию с такими пакетами моделирования, как Math Works MATLAB Simulink, обеспечивает поддержку таких
- 11. Math Works MATLAB предназначен для проектирования систем управления; анализа данных; обработки изображений; цифровой обработки сигналов; визулизации
- 12. Программы MATLAB являются платформонезависимыми, поэтому пользовательские программы могут при необходимости быть перенесены на любую платформу без
- 13. Набор специализированных приложений (тулбоксов) позволяет обрабатывать сигналы и изображения, разрабатывать системы управления, проводить исследования с использованием
- 14. MATLAB также содержит интерфейс для вызова Java-процедур; коммуникационный интерфейс (последовательный порт) для связи с внешним оборудованием;
- 15. MATLAB Simulink и его приложения Для моделирования, имитации и анализа динамических систем применяется интерактивный инструмент Math
- 16. Simulink Performance Tools содержит четыре инструмента для пользователей Simulink, проектирующих крупномасштабные, сложные модели: Simulink Accelerator ускоряет
- 17. При создании и настраивании отчетов из MATLAB, Simulink и Stateflow моделей и данных в различных выходных
- 18. MATLAB Compiler включает MATLAB C/C++ Math and Graphics Libraries. Он позволяет компилировать m-файлы в коды на
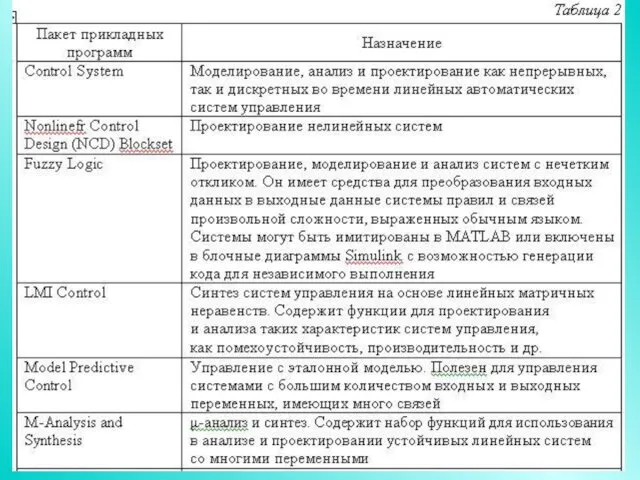
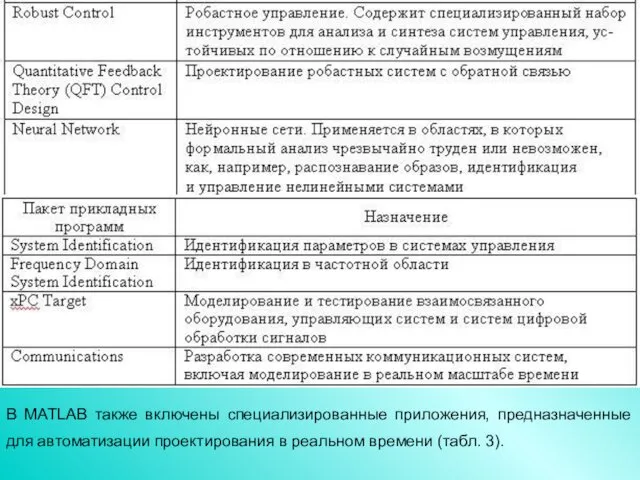
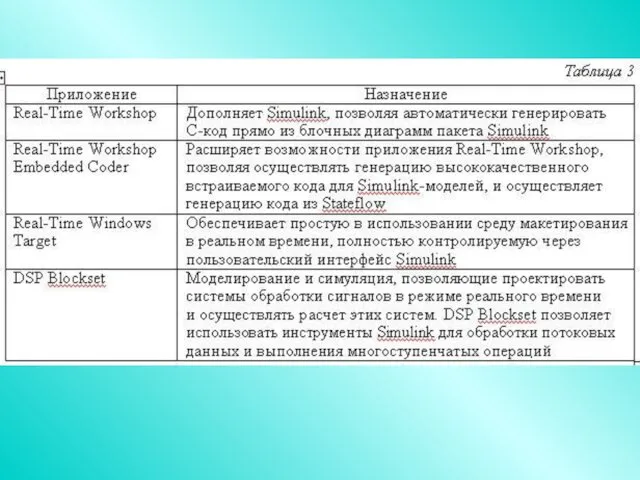
- 20. В MATLAB также включены специализированные приложения, предназначенные для автоматизации проектирования в реальном времени (табл. 3).
- 22. Для моделирования и исследования электромеханических систем полезными будут следующие библиотеки MATLAB (табл. 4).
- 23. Программные средства для визуализации движений механизмов и процессов обработки вещества (материала) Эффективность проектирования повышается, если при
- 24. Развивая блочно-модульную идеологию построения средств и систем управления до уровня механизмов, агрегатов и комплексов, можно выделить
- 25. В результате вышеизложенного подхода может быть определена объектно-ориентированная модель программного обеспечения и определены все основные объекты,
- 26. – диаграммы взаимодействий, которые изображают, как взаимодействуют объекты при выполнении системных функций; – схемы организации функционирования
- 27. Организационная структура отображает собой сложившуюся модель функционирования комплекса. При декомпозиции выделяются функциональные подсистемы, определяемые типовыми решаемыми
- 28. Визуализация более сложных технологических объектов производится с использованием совокупности простейших графических примитивов. Основная проблема, которая возникает
- 29. Это позволит повысить быстродействие в получении выходной координаты, характеризующей исполнительный орган, и, как следствие, уменьшить объем
- 31. Для решения вышепоставленных задач применяют математический пакет MATLAB, дописав недостающие функции (программные единицы). Существует несколько способов
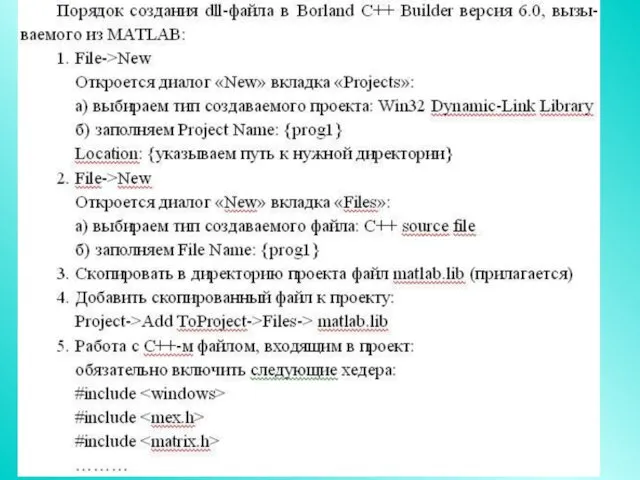
- 32. Для того чтобы написать модуль, расширяющий набор функций MATLAB, нужно создать обычную динамическую библиотеку (DLL) для
- 33. В документации по системе MATLAB для подобных расширений употребляется термин MEX-файл (Matlab Extension). Специально назначать MEX
- 34. В модулях-расширениях MATLAB (MEX-файлах) для обмена параметрами всех типов с вычислительной средой MATLAB используется одна структура
- 37. Если для исследования КЭС применяется подсистема моделирования динамических процессов Math Works MATLAB Simulink, то для создания
- 38. Создаваемые блоки могут реализовывать непрерывные, дискретные или гибридные (дискретно-непрерывные) модели. S-функции, созданные на языках С, C++,
- 39. OpenGL является программным интерфейсом для графических устройств и включает в себя несколько сотен функций и процедур,
- 40. С одной стороны, императивный подход требует от программиста глубокого знания законов трёхмерной графики и математических моделей,
- 41. Система Direct3D (как и всё семейство DirectX) построена на основе COM – составной объектной модели (Component
- 42. Интерфейс Direct3D в отличие от других API для программирования 3D-графики состоит из нескольких уровней: – верхнего
- 43. – множество источников разных типов; – полная поддержка работы с материалами и текстурами, мипмэппинг; – быстрые
- 44. Язык VRML (Virtual Reality Modeling Language – язык моделирования виртуальной реальности) – предназначен для описания трехмерных
- 45. Рис. 12. Пример текста на VRML
- 46. VRML обладает следующими возможностями: – геометрические примитивы (куб, сфера, многоуровневые поверхности); – работа с цветом в
- 47. VRML позволяет создавать трехмерные модели типовых механизмов в виде совокупности простых (параллелепипед, конус, цилиндр и эллипсоид)
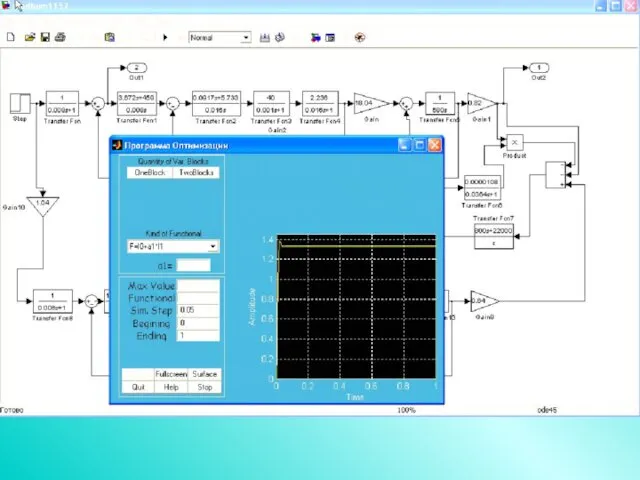
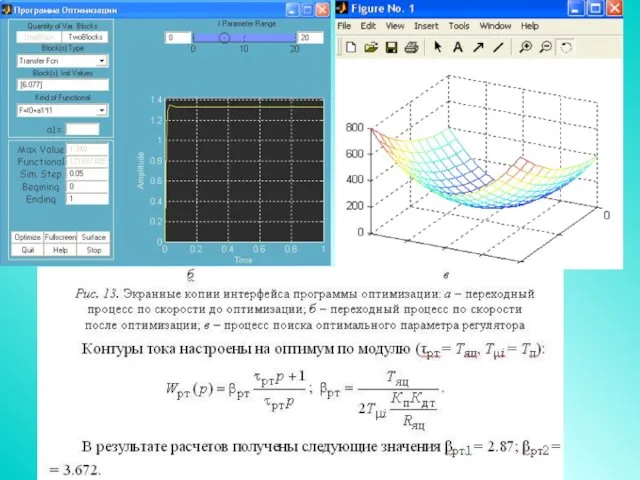
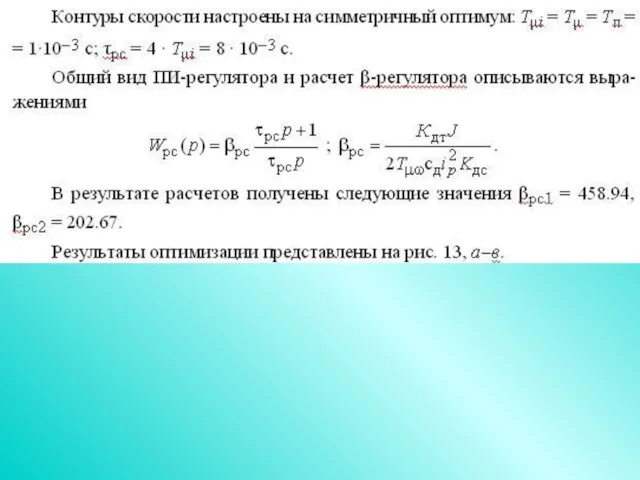
- 48. Программные средства для оптимизации Для оптимизации требуется применение таких программных средств, которые обеспечивают достижение требуемого результата
- 49. ∙ Безусловная минимизация функций многих переменных: а) прямые методы (минимизация по правильному симплексу, по деформированному симплексу,
- 50. ∙ Оптимизация в бесконечномерных пространствах: а) приближенные методы безусловной минимизации функционалов в гильбертовом пространстве (градиентного спуска,
- 51. В Optimization Toolbox используется три метода для решения нелинейных задач без наличия ограничений: квази-Ньютоновский метод; метод
- 52. Многокритериальная оптимизация предназначена в основном для минимизации многоцелевых функций с учетом некоего набора ограничений. В Optimization
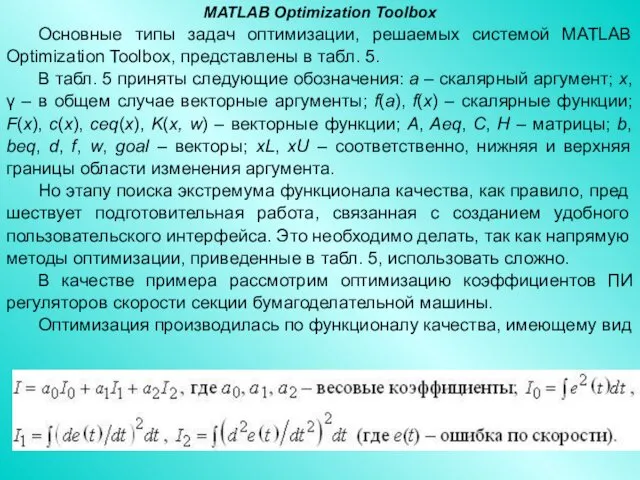
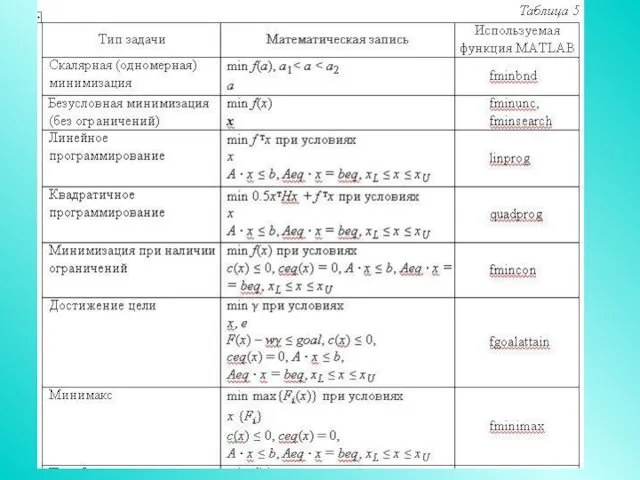
- 53. MATLAB Optimization Toolbox Основные типы задач оптимизации, решаемых системой MATLAB Optimization Toolbox, представлены в табл. 5.
- 59. Перечислим некоторые другие программные продукты, используемые для моделирования систем. Полные сведения об их возможностях можно получить
- 60. DYNAST – ПО для расчета переходных процессов, символического и частотного анализа линеаризованных систем, описываемых системами дифференциальных
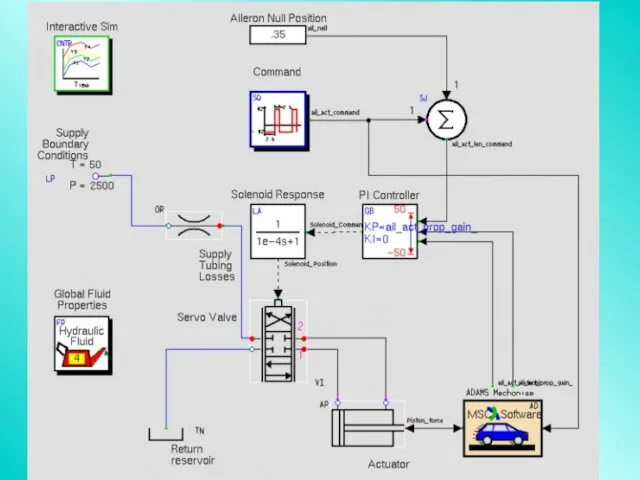
- 61. Смоделированные в EASY5 системы включаются в модели, созданные в Patran и/или Adams с целью проведения всесторонних
- 62. Cистема EASY5 является одним из важнейших компонентов современных vpd-технологий. Программный пакет EASY5 включает множество готовых математических
- 63. Кроме того, модели EASY5 можно встраивать в модели системы matlab/simulink. В состав EASY5 включен модуль matrix
- 65. Пользователям EASY5 предложены библиотеки компонентов для многодисциплинарного анализа, включая специализированные наборы для аэрокосмической, автомобильной и других
- 66. Adams – программное средство для виртуального моделирования сложных машин и механизмов. С помощью Adams быстро создается
- 67. Adams позволяет исследовать десятки, сотни и даже тысячи вариантов конструкции, выбирать лучший, совершенствовать и совершенствовать будущее
- 68. Adams от других систем моделирования и проектирования отличают: – широкий набор видов кинематических связей, упругих и
- 69. Наряду с развитием универсальных возможностей пакета, разработчиками Adams созданы проблемно-ориентированные модули, обеспечивающие точное и быстрое моделирование
- 70. Результаты расчёта деформаций упругого компонента в Adams могут быть также «переданы» в конечно-элементную систему (MD Nastran
- 71. МВТУ – программа «Моделирование в технических устройствах». Является отечественной разработкой с классическим интерфейсом блочного моделирования. Исследование
- 72. SamSim – моделирование линейных и нелинейных цепей САУ, построение временных, частотных характеристик, фазовых портретов и годографов.
- 73. КОПРАС – комплекс программ для анализа и синтеза автоматических систем (для ТАУ). Имеет большой набор решающих,
- 74. Комплекс APM WinMachine позволяет решать следующие задачи: – проектирование и анализ механического оборудования и его элементов
- 75. В состав APM WinMachine входят следующие АРМ: 1. APM Graph – двумерный графический редактор, который используется
- 76. Модуль APM Structure3D позволяет решать следующие задачи: 1) cопределение полей эквивалентных напряжений и их составляющих; 2)
- 77. 5. APM Beam. С помощью модуля APM Beam можно выполнить расчет балки и подбор ее наиболее
- 78. 8. APM Trans. APM Trans – модуль проектирования и проверки механических передач вращения. С помощью APM
- 79. 12. APM Plain. APM Plain – модуль проектирования и расчета подшипников скольжения. 13. APM Cam. APM
- 80. 16. APM Calculation Instrument. APM Calculation Instrument – модуль, предназначенный для выполнения инженерных (конструкторских и технологических)
- 81. MD Nastran (от MultiDiscipline Nastran) – система, объединяющая лучшие в своем классе системы компьютерного инженерного анализа,
- 82. MD Nastran построен на базе MSC Nastran –системы конечно-элементного анализа. В дополнение к возможностям MSC Nastran,
- 83. MSC Nastran. MSC Nastran – продукт MSC. MSC Nastran обеспечивает полный набор расчетов, включая расчет напряженно-деформированного
- 84. Предусмотрена возможность передачи моделей упругих тел в Adams, которые будут использоваться в этом программном комплексе при
- 85. Тесная связь MSC Nastran с системой Patran обеспечивает полностью интегрированную среду для моделирования и анализа результатов.
- 86. Patran – это интегрирующая среда систем проектирования, моделирования и анализа на основе современного графического пользовательского интерфейса.
- 87. Patran включает в себя обширные функции создания и модификации геометрических моделей, в том числе твердотельное моделирование
- 88. Функции «Группы», «Списки», «Суперэлементы», «Области» и др. дают возможность создавать и обрабатывать полноразмерные подробные модели сложных
- 89. Autodesk Algor Simulation (Autodesk). Autodesk Algor Simulation обеспечивает решение широкого спектра задач механики деформируемого твердого тела,
- 90. Marc 2008 (MSC Software). Marc представляет собой универсальную конечно-элементную программу для проведения углубленного анализа высоконелинейного поведения
- 91. AFEA – интегрированное персональное рабочее место на основе комплекса «Patran – Marc». В единой среде графического
- 93. Скачать презентацию
При выборе того или иного программного продукта необходимо учитывать следующее:
− вид математического
При выборе того или иного программного продукта необходимо учитывать следующее:
− вид математического
В настоящее время в основе существующих функционально ориентированных методов, направленных на
В настоящее время в основе существующих функционально ориентированных методов, направленных на
Усовершенствованная методика программирования (IPT) является наиболее перспективным подходом к усовершенствованию методологии
Усовершенствованная методика программирования (IPT) является наиболее перспективным подходом к усовершенствованию методологии
Для моделирования СУ применяют следующие программные средства: MATLAB («MathWorks, Inc»), GPSS
Для моделирования СУ применяют следующие программные средства: MATLAB («MathWorks, Inc»), GPSS
Math Works MATLAB Simulink, VisSim, MBTY, Easy5S относятся к программам с
Math Works MATLAB Simulink, VisSim, MBTY, Easy5S относятся к программам с
Dynast, 20-sim, Dymola, Simplorer, ITI-sim, Pspice, Multisim, Micro-Cap относятся к программам
Dynast, 20-sim, Dymola, Simplorer, ITI-sim, Pspice, Multisim, Micro-Cap относятся к программам
Недостатки первой группы моделирующих программ связаны с достоинствами второй, и наоборот.
Недостатки первой группы моделирующих программ связаны с достоинствами второй, и наоборот.
Он не ограничивает количество компонентов моделируемой системы компонентами, поставляемыми разработчиками, –
Он не ограничивает количество компонентов моделируемой системы компонентами, поставляемыми разработчиками, –
Язык Modelica поддерживает интеграцию с такими пакетами моделирования, как Math Works
Язык Modelica поддерживает интеграцию с такими пакетами моделирования, как Math Works
Math Works MATLAB предназначен для проектирования систем управления; анализа данных; обработки
Math Works MATLAB предназначен для проектирования систем управления; анализа данных; обработки
Программы MATLAB являются платформонезависимыми, поэтому пользовательские программы могут при необходимости быть
Программы MATLAB являются платформонезависимыми, поэтому пользовательские программы могут при необходимости быть
Набор специализированных приложений (тулбоксов) позволяет обрабатывать сигналы и изображения, разрабатывать системы
Набор специализированных приложений (тулбоксов) позволяет обрабатывать сигналы и изображения, разрабатывать системы
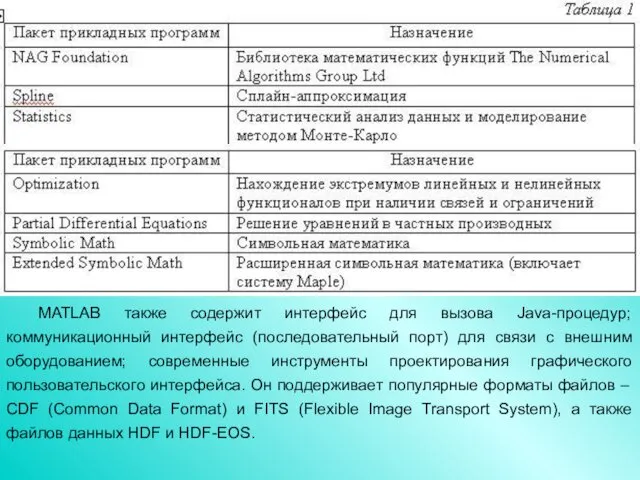
MATLAB также содержит интерфейс для вызова Java-процедур; коммуникационный интерфейс (последовательный порт)
MATLAB также содержит интерфейс для вызова Java-процедур; коммуникационный интерфейс (последовательный порт)
MATLAB Simulink и его приложения
Для моделирования, имитации и анализа динамических систем
MATLAB Simulink и его приложения
Для моделирования, имитации и анализа динамических систем
Simulink Performance Tools содержит четыре инструмента для пользователей Simulink, проектирующих крупномасштабные,
Simulink Performance Tools содержит четыре инструмента для пользователей Simulink, проектирующих крупномасштабные,
При создании и настраивании отчетов из MATLAB, Simulink и Stateflow моделей
При создании и настраивании отчетов из MATLAB, Simulink и Stateflow моделей
MATLAB Compiler включает MATLAB C/C++ Math and Graphics Libraries. Он позволяет
MATLAB Compiler включает MATLAB C/C++ Math and Graphics Libraries. Он позволяет
В MATLAB также включены специализированные приложения, предназначенные для автоматизации проектирования в
В MATLAB также включены специализированные приложения, предназначенные для автоматизации проектирования в
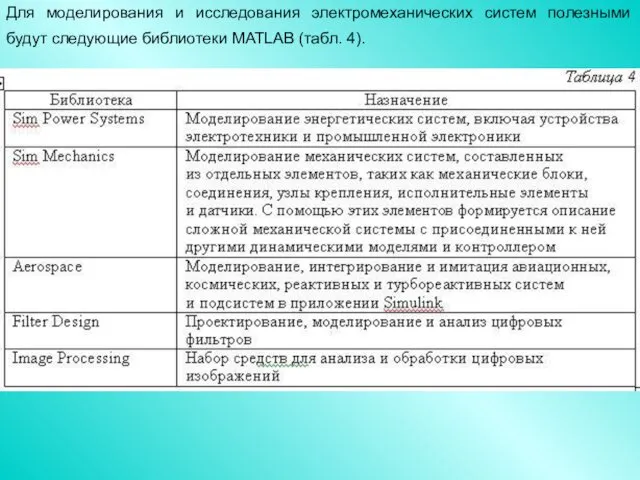
Для моделирования и исследования электромеханических систем полезными будут следующие библиотеки MATLAB
Для моделирования и исследования электромеханических систем полезными будут следующие библиотеки MATLAB
Программные средства для визуализации движений механизмов
и процессов обработки вещества (материала)
Эффективность проектирования
Программные средства для визуализации движений механизмов
и процессов обработки вещества (материала)
Эффективность проектирования
Развивая блочно-модульную идеологию построения средств и систем управления до уровня механизмов,
Развивая блочно-модульную идеологию построения средств и систем управления до уровня механизмов,
В результате вышеизложенного подхода может быть определена объектно-ориентированная модель программного обеспечения
В результате вышеизложенного подхода может быть определена объектно-ориентированная модель программного обеспечения
– диаграммы взаимодействий, которые изображают, как взаимодействуют объекты при выполнении системных функций;
– схемы
– диаграммы взаимодействий, которые изображают, как взаимодействуют объекты при выполнении системных функций;
– схемы
Организационная структура отображает собой сложившуюся модель функционирования комплекса. При декомпозиции выделяются
Организационная структура отображает собой сложившуюся модель функционирования комплекса. При декомпозиции выделяются
Визуализация более сложных технологических объектов производится с использованием совокупности простейших графических
Визуализация более сложных технологических объектов производится с использованием совокупности простейших графических
Это позволит повысить быстродействие в получении выходной координаты, характеризующей исполнительный орган,
Это позволит повысить быстродействие в получении выходной координаты, характеризующей исполнительный орган,

Для решения вышепоставленных задач применяют математический пакет MATLAB, дописав недостающие функции
Для решения вышепоставленных задач применяют математический пакет MATLAB, дописав недостающие функции
Для того чтобы написать модуль, расширяющий набор функций MATLAB, нужно создать
Для того чтобы написать модуль, расширяющий набор функций MATLAB, нужно создать
В документации по системе MATLAB для подобных расширений употребляется термин MEX-файл
В документации по системе MATLAB для подобных расширений употребляется термин MEX-файл
В модулях-расширениях MATLAB (MEX-файлах) для обмена параметрами всех типов с вычислительной
В модулях-расширениях MATLAB (MEX-файлах) для обмена параметрами всех типов с вычислительной

Если для исследования КЭС применяется подсистема моделирования динамических процессов Math Works
Если для исследования КЭС применяется подсистема моделирования динамических процессов Math Works
Создаваемые блоки могут реализовывать непрерывные, дискретные или гибридные (дискретно-непрерывные) модели. S-функции,
Создаваемые блоки могут реализовывать непрерывные, дискретные или гибридные (дискретно-непрерывные) модели. S-функции,
OpenGL является программным интерфейсом для графических устройств и включает в себя
OpenGL является программным интерфейсом для графических устройств и включает в себя
С одной стороны, императивный подход требует от программиста глубокого знания законов
С одной стороны, императивный подход требует от программиста глубокого знания законов
Система Direct3D (как и всё семейство DirectX) построена на основе COM
Система Direct3D (как и всё семейство DirectX) построена на основе COM
Интерфейс Direct3D в отличие от других API для программирования 3D-графики состоит
Интерфейс Direct3D в отличие от других API для программирования 3D-графики состоит
– множество источников разных типов;
– полная поддержка работы с материалами и текстурами,
– множество источников разных типов;
– полная поддержка работы с материалами и текстурами,
Язык VRML (Virtual Reality Modeling Language – язык моделирования виртуальной реальности)
Язык VRML (Virtual Reality Modeling Language – язык моделирования виртуальной реальности)
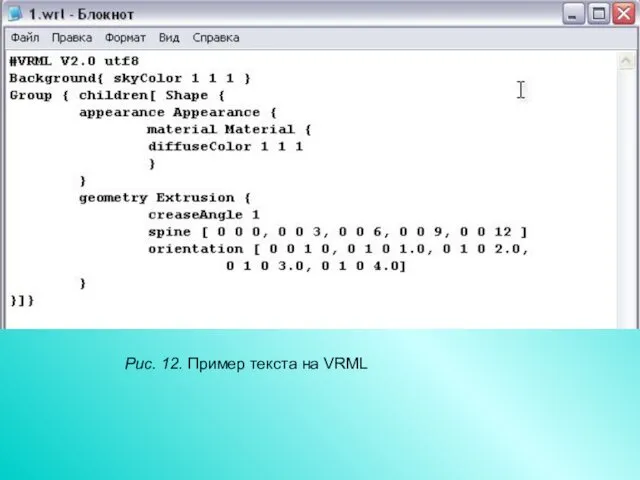
Рис. 12. Пример текста на VRML
Рис. 12. Пример текста на VRML
VRML обладает следующими возможностями:
– геометрические примитивы (куб, сфера, многоуровневые поверхности);
– работа с
VRML обладает следующими возможностями:
– геометрические примитивы (куб, сфера, многоуровневые поверхности);
– работа с
VRML позволяет создавать трехмерные модели типовых механизмов в виде совокупности простых
VRML позволяет создавать трехмерные модели типовых механизмов в виде совокупности простых
Программные средства для оптимизации
Для оптимизации требуется применение таких программных средств, которые
Программные средства для оптимизации
Для оптимизации требуется применение таких программных средств, которые
∙ Безусловная минимизация функций многих переменных: а) прямые методы (минимизация по правильному
∙ Безусловная минимизация функций многих переменных: а) прямые методы (минимизация по правильному
∙ Оптимизация в бесконечномерных пространствах: а) приближенные методы безусловной минимизации функционалов в
∙ Оптимизация в бесконечномерных пространствах: а) приближенные методы безусловной минимизации функционалов в
В Optimization Toolbox используется три метода для решения нелинейных задач без
В Optimization Toolbox используется три метода для решения нелинейных задач без
Многокритериальная оптимизация предназначена в основном для минимизации многоцелевых функций с учетом
Многокритериальная оптимизация предназначена в основном для минимизации многоцелевых функций с учетом
MATLAB Optimization Toolbox
Основные типы задач оптимизации, решаемых системой MATLAB Optimization Toolbox,
MATLAB Optimization Toolbox
Основные типы задач оптимизации, решаемых системой MATLAB Optimization Toolbox,
Перечислим некоторые другие программные продукты, используемые для моделирования систем. Полные сведения
Перечислим некоторые другие программные продукты, используемые для моделирования систем. Полные сведения
DYNAST – ПО для расчета переходных процессов, символического и частотного анализа
DYNAST – ПО для расчета переходных процессов, символического и частотного анализа
Смоделированные в EASY5 системы включаются в модели, созданные в Patran и/или
Смоделированные в EASY5 системы включаются в модели, созданные в Patran и/или
Cистема EASY5 является одним из важнейших компонентов современных vpd-технологий. Программный пакет
Cистема EASY5 является одним из важнейших компонентов современных vpd-технологий. Программный пакет
Кроме того, модели EASY5 можно встраивать в модели системы matlab/simulink. В
Кроме того, модели EASY5 можно встраивать в модели системы matlab/simulink. В
Пользователям EASY5 предложены библиотеки компонентов для многодисциплинарного анализа, включая специализированные наборы
Пользователям EASY5 предложены библиотеки компонентов для многодисциплинарного анализа, включая специализированные наборы
Adams – программное средство для виртуального моделирования сложных машин и механизмов.
Adams – программное средство для виртуального моделирования сложных машин и механизмов.
Adams позволяет исследовать десятки, сотни и даже тысячи вариантов конструкции, выбирать
Adams позволяет исследовать десятки, сотни и даже тысячи вариантов конструкции, выбирать
Adams от других систем моделирования и проектирования отличают:
– широкий набор
Adams от других систем моделирования и проектирования отличают:
– широкий набор
Наряду с развитием универсальных возможностей пакета, разработчиками Adams созданы проблемно-ориентированные модули,
Наряду с развитием универсальных возможностей пакета, разработчиками Adams созданы проблемно-ориентированные модули,
Результаты расчёта деформаций упругого компонента в Adams могут быть также «переданы»
Результаты расчёта деформаций упругого компонента в Adams могут быть также «переданы»
МВТУ – программа «Моделирование в технических устройствах». Является отечественной разработкой с
МВТУ – программа «Моделирование в технических устройствах». Является отечественной разработкой с
SamSim – моделирование линейных и нелинейных цепей САУ, построение временных, частотных
SamSim – моделирование линейных и нелинейных цепей САУ, построение временных, частотных
КОПРАС – комплекс программ для анализа и синтеза автоматических систем (для
КОПРАС – комплекс программ для анализа и синтеза автоматических систем (для
Комплекс APM WinMachine позволяет решать следующие задачи:
– проектирование и анализ
Комплекс APM WinMachine позволяет решать следующие задачи:
– проектирование и анализ
В состав APM WinMachine входят следующие АРМ:
1. APM Graph – двумерный
В состав APM WinMachine входят следующие АРМ:
1. APM Graph – двумерный
Модуль APM Structure3D позволяет решать следующие задачи: 1) cопределение полей эквивалентных
Модуль APM Structure3D позволяет решать следующие задачи: 1) cопределение полей эквивалентных
5. APM Beam. С помощью модуля APM Beam можно выполнить расчет
5. APM Beam. С помощью модуля APM Beam можно выполнить расчет
8. APM Trans. APM Trans – модуль проектирования и проверки механических
8. APM Trans. APM Trans – модуль проектирования и проверки механических
12. APM Plain. APM Plain – модуль проектирования и расчета подшипников
12. APM Plain. APM Plain – модуль проектирования и расчета подшипников
16. APM Calculation Instrument. APM Calculation Instrument – модуль, предназначенный для
16. APM Calculation Instrument. APM Calculation Instrument – модуль, предназначенный для
MD Nastran (от MultiDiscipline Nastran) – система, объединяющая лучшие в своем
MD Nastran (от MultiDiscipline Nastran) – система, объединяющая лучшие в своем
MD Nastran построен на базе MSC Nastran –системы конечно-элементного анализа. В
MD Nastran построен на базе MSC Nastran –системы конечно-элементного анализа. В
MSC Nastran. MSC Nastran – продукт MSC. MSC Nastran обеспечивает полный
MSC Nastran. MSC Nastran – продукт MSC. MSC Nastran обеспечивает полный
Предусмотрена возможность передачи моделей упругих тел в Adams, которые будут использоваться
Предусмотрена возможность передачи моделей упругих тел в Adams, которые будут использоваться
Тесная связь MSC Nastran с системой Patran обеспечивает полностью интегрированную среду
Тесная связь MSC Nastran с системой Patran обеспечивает полностью интегрированную среду
Patran – это интегрирующая среда систем проектирования, моделирования и анализа на
Patran – это интегрирующая среда систем проектирования, моделирования и анализа на
Patran включает в себя обширные функции создания и модификации геометрических моделей,
Patran включает в себя обширные функции создания и модификации геометрических моделей,
Функции «Группы», «Списки», «Суперэлементы», «Области» и др. дают возможность создавать и
Функции «Группы», «Списки», «Суперэлементы», «Области» и др. дают возможность создавать и
Autodesk Algor Simulation (Autodesk). Autodesk Algor Simulation обеспечивает решение широкого спектра
Autodesk Algor Simulation (Autodesk). Autodesk Algor Simulation обеспечивает решение широкого спектра
Marc 2008 (MSC Software). Marc представляет собой универсальную конечно-элементную программу для
Marc 2008 (MSC Software). Marc представляет собой универсальную конечно-элементную программу для
AFEA – интегрированное персональное рабочее место на основе комплекса «Patran –
AFEA – интегрированное персональное рабочее место на основе комплекса «Patran –
 Измерение температуры
Измерение температуры Требования безопасности на маршруте экскурсии
Требования безопасности на маршруте экскурсии Презентация к родительскому собранию на тему Безопасность детей в Интернете
Презентация к родительскому собранию на тему Безопасность детей в Интернете Мастер-класс как сделать стенд календарь природы своими руками автор: Тухватуллина в. Р.
Мастер-класс как сделать стенд календарь природы своими руками автор: Тухватуллина в. Р. Социальная защита населения
Социальная защита населения Международная защита прав человека
Международная защита прав человека презентация по технологии Объёмная снежинка
презентация по технологии Объёмная снежинка Мікропроцесорна техніка
Мікропроцесорна техніка Faýl sistemasy barada düşünje faýla barýan ýol faýlyň möçberi faýl guramaçylary(menejerler) “ýolbelet” programma
Faýl sistemasy barada düşünje faýla barýan ýol faýlyň möçberi faýl guramaçylary(menejerler) “ýolbelet” programma Требования законодательства в области лицензирования деятельности по сбору, утилизации, размещению отходов I-IV класса опасности
Требования законодательства в области лицензирования деятельности по сбору, утилизации, размещению отходов I-IV класса опасности Презентация Права ребенка
Презентация Права ребенка Как добиться прозрачности и контролируемости бизнеса
Как добиться прозрачности и контролируемости бизнеса Новый год к нам мчится...
Новый год к нам мчится... Анализ и оценка внешних климатических условий и меры регулирования
Анализ и оценка внешних климатических условий и меры регулирования Стрітення
Стрітення Принятие христианство на Руси
Принятие христианство на Руси Орган зрения и зрительный анализатор
Орган зрения и зрительный анализатор Проект по экологии на тему: Засоренность окружающей среды бытовыми отходами вокруг села Кырен
Проект по экологии на тему: Засоренность окружающей среды бытовыми отходами вокруг села Кырен Анализ ассортимента, оценка качества и основы экспертизы копченых-колбас на примере торговой организации города Севастополя
Анализ ассортимента, оценка качества и основы экспертизы копченых-колбас на примере торговой организации города Севастополя Источниковая база для написания проектных и исследовательских работ
Источниковая база для написания проектных и исследовательских работ Способы бурения шпуров, буровое оборудование
Способы бурения шпуров, буровое оборудование Образование взгляд в будущее. Проблемы, перспективы, прогнозы
Образование взгляд в будущее. Проблемы, перспективы, прогнозы Общая характеристика основных видов транспорта нефти, нефтепродуктов и газа. Лекция №1
Общая характеристика основных видов транспорта нефти, нефтепродуктов и газа. Лекция №1 Санитарно-просветительная работа. Формирование ЗОЖ. Тема 16
Санитарно-просветительная работа. Формирование ЗОЖ. Тема 16 Расчет экономической составляющей дизайн-проекта трехкомнатной квартиры
Расчет экономической составляющей дизайн-проекта трехкомнатной квартиры Электронное колье NeckTec: носимый компьютер будущего
Электронное колье NeckTec: носимый компьютер будущего Обструктивные уропатии
Обструктивные уропатии Академия наук
Академия наук