- Асинхронные двигатели

Содержание
- 2. Устройство асинхронного двигателя основано на принципе воздействия вращающегося магнитного поля статора на короткозамкнутый виток – ротор.
- 3. Статор 1 представляет собой пустотелый цилиндр, собранный из листов электротехнической стали, изолированных друг от друга. На
- 4. Пазы статора 2 нужны для укладки статорной обмотки, которая, питаясь от трехфазной системы тока, создает вращающееся
- 5. Ротор 3 представляет собой подвижный цилиндр, набранный из листов электротехнической стали, на котором прорезаются пазы для
- 6. Энергия, поступающая из сети в статор двигателя, передается через воздушный зазор магнитным потоком в ротор. В
- 7. Частота вращения, с которой вращается поле статора, называется синхронной и обозначается n1. Частота вращения ротора называется
- 8. Принято колебания по частоте вращения двигателя в зависимости от нагрузки оценивать величиной S, которая называется скольжением
- 9. Асинхронный двигатель с короткозамкнутым ротором Обмотка ротора короткозамкнутого двигателя представляет собой беличье колесо. Здесь в каждый
- 10. Основной недостаток двигателей с короткозамкнутым ротором - это невозможность изменять активное сопротивление обмотки ротора. Такие двигатели
- 11. Положительные качества – высокая механическая и электрическая прочность, простота и надежность конструкции, малая стоимость.
- 12. У двигателей с фазным ротором в пазы ротора укладывается трехфазная обмотка, выполненная из провода с изоляцией.
- 13. Статор асинхронного двигателя Основное назначение статора – создать вращающееся магнитное поле. Для этого в пазы статора
- 14. а)3-х фазная обмотка имеет три катушки и одну пару полюсов (р), здесь каждый полюс занимает половину
- 15. Если учесть, что , то Выражение определяет синхронное число оборотов магнитного поля статора для частоты питающего
- 16. ЭДС обмотки статора ЭДС одной фазы обмотки ротора К – обмоточный коэффициент Ток ротора определяется по
- 17. Коэффициент мощности обмоток ротора Графики зависимостей Е2, z2, I2, cos ϕ2 от скольжения S
- 18. Вращающий момент асинхронного двигателя В любом двигателе вращающий момент образуется за счет взаимодействия магнитного поля и
- 19. Рассмотрим режим двигателя, т.е. при скольжении, изменяющемся от 1 до 0. Обозначим момент, развиваемый двигателем при
- 20. Критический момент не зависит от активного сопротивления ротора, но зависит от подведенного напряжения. При уменьшении U1снижается
- 21. Участок характеристики, на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой работе двигателя. На этом
- 22. С увеличением момента нагрузки на валу частота вращения ротора станет меньше, что приведет к увеличению скольжения
- 23. Участок характеристики, на котором скольжение изменяется от Sкр до 1, соответствует неустойчивой работе двигателя. Этот участок
- 24. Пусковой ток асинхронного двигателя Пусковым током называется ток, поступающий в двигатель в момент включения его в
- 25. Способы уменьшения броска тока при пуске асинхронных двигателей Прямой пуск асинхронного двигателя Практически, необходимо, чтобы соблюдались
- 26. Переключение статора короткозамкнутого двигателя, нормально работающего по схеме «Y», на время пуска на схему «Δ» Схема
- 27. Пуск двигателя с помощью автотрансформатора Порядок включения: 1) Замыкаем рубильник Р1. 2) Замыкаем рубильник Р2, при
- 28. Пуск двигателя с фазным ротором Порядок включения: 1) Реостат Rp ставят в положение «а», при этом
- 29. Таким образом, при изменении сопротивления реостата кривая момента перемещается в случае увеличения сопротивления в сторону больших
- 30. Реверсом называется такой режим работы двигателя, при котором изменяется направление вращения. Реверс асинхронного двигателя осуществляется изменением
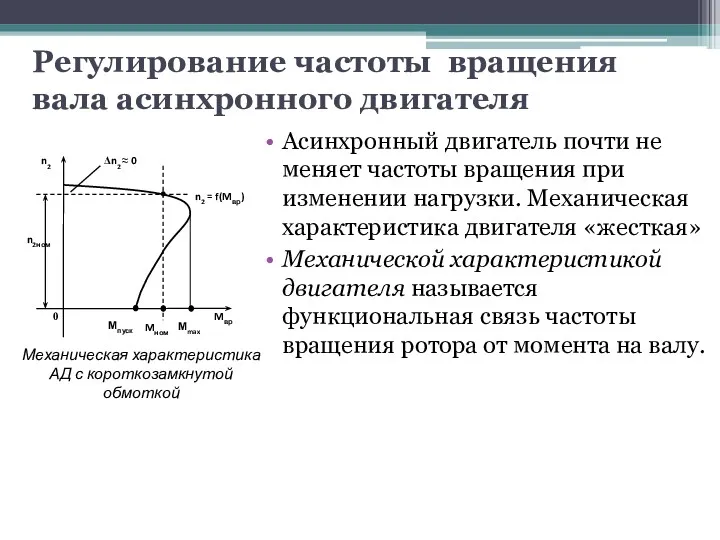
- 31. Регулирование частоты вращения вала асинхронного двигателя Асинхронный двигатель почти не меняет частоты вращения при изменении нагрузки.
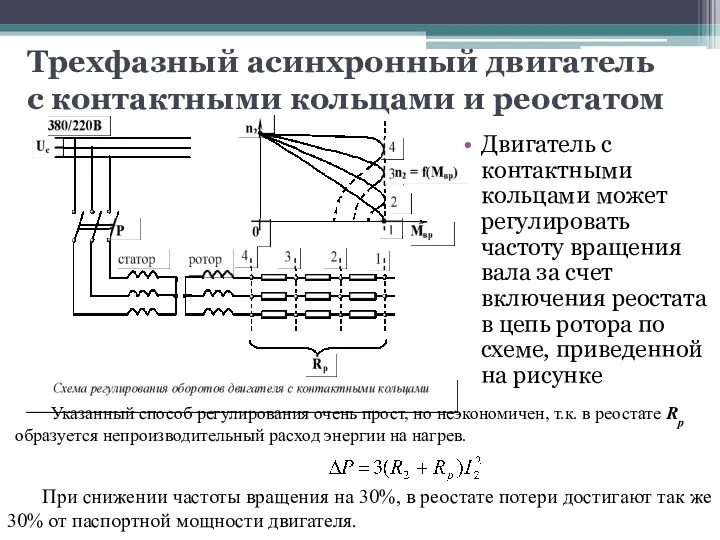
- 32. Трехфазный асинхронный двигатель с контактными кольцами и реостатом Двигатель с контактными кольцами может регулировать частоту вращения
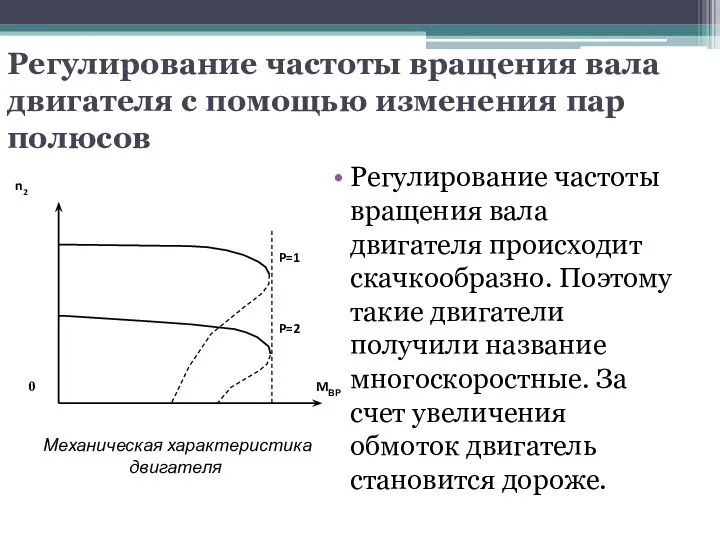
- 33. Регулирование частоты вращения вала двигателя с помощью изменения пар полюсов Регулирование частоты вращения вала двигателя происходит
- 34. Потери и коэффициент полезного действия потери энергии на нагрев статорной и роторной обмоток потери энергии на
- 36. Скачать презентацию
Устройство асинхронного двигателя основано на принципе воздействия вращающегося магнитного поля статора
Устройство асинхронного двигателя основано на принципе воздействия вращающегося магнитного поля статора
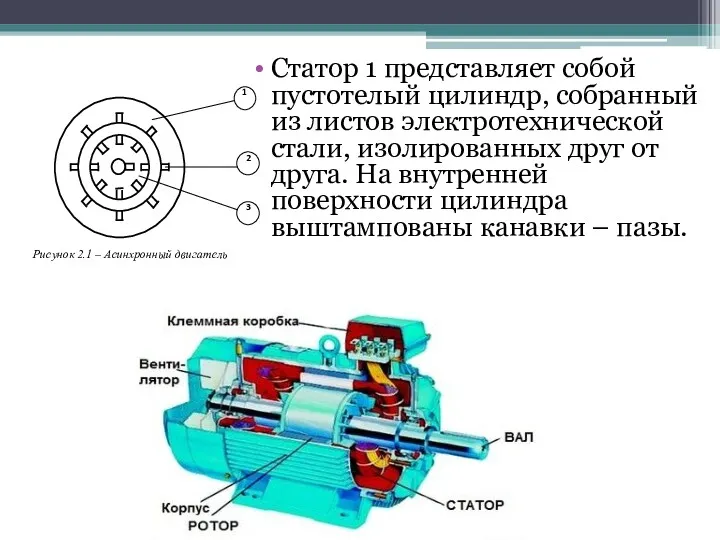
Статор 1 представляет собой пустотелый цилиндр, собранный из листов электротехнической стали,
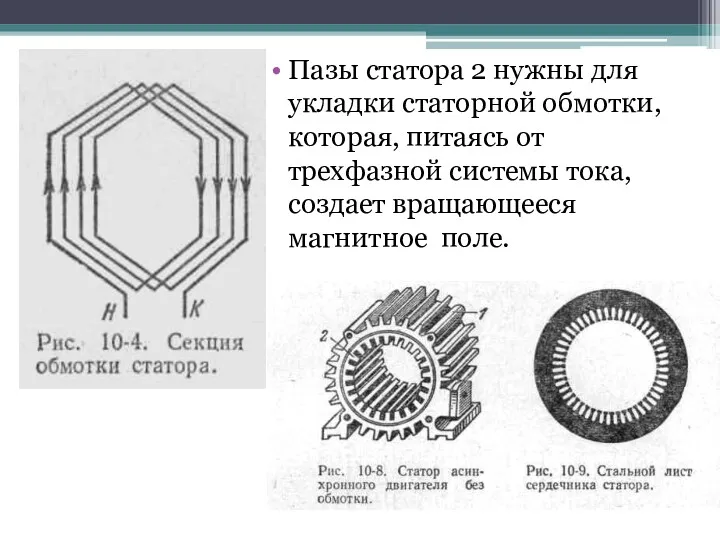
Пазы статора 2 нужны для укладки статорной обмотки, которая, питаясь от
Пазы статора 2 нужны для укладки статорной обмотки, которая, питаясь от
Ротор 3 представляет собой подвижный цилиндр, набранный из листов электротехнической стали,
Ротор 3 представляет собой подвижный цилиндр, набранный из листов электротехнической стали,
Энергия, поступающая из сети в статор двигателя, передается через воздушный зазор
Энергия, поступающая из сети в статор двигателя, передается через воздушный зазор
Частота вращения, с которой вращается поле статора, называется синхронной и обозначается
Частота вращения, с которой вращается поле статора, называется синхронной и обозначается
Принято колебания по частоте вращения двигателя в зависимости от нагрузки оценивать
Принято колебания по частоте вращения двигателя в зависимости от нагрузки оценивать
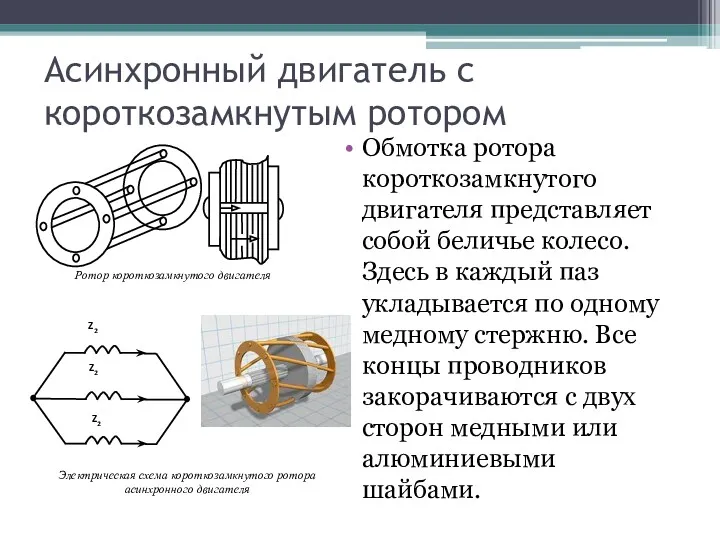
Асинхронный двигатель с короткозамкнутым ротором
Обмотка ротора короткозамкнутого двигателя представляет собой беличье
Асинхронный двигатель с короткозамкнутым ротором
Обмотка ротора короткозамкнутого двигателя представляет собой беличье
Основной недостаток двигателей с короткозамкнутым ротором - это невозможность изменять активное
Основной недостаток двигателей с короткозамкнутым ротором - это невозможность изменять активное
Положительные качества – высокая механическая и электрическая прочность, простота и надежность
Положительные качества – высокая механическая и электрическая прочность, простота и надежность
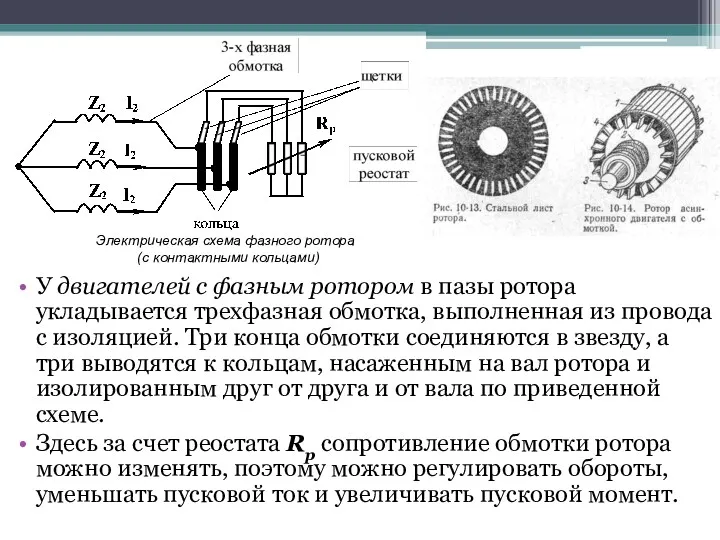
У двигателей с фазным ротором в пазы ротора укладывается трехфазная обмотка,
У двигателей с фазным ротором в пазы ротора укладывается трехфазная обмотка,
Статор асинхронного двигателя
Основное назначение статора – создать вращающееся магнитное поле. Для
Статор асинхронного двигателя
Основное назначение статора – создать вращающееся магнитное поле. Для
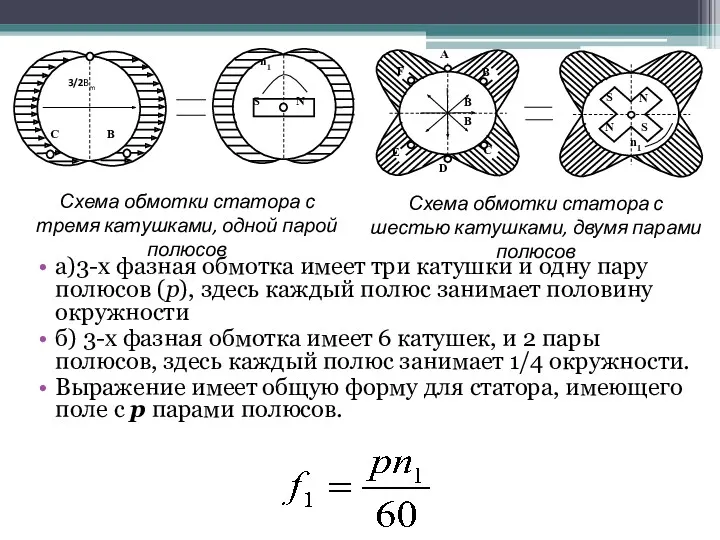
а)3-х фазная обмотка имеет три катушки и одну пару полюсов (р),
а)3-х фазная обмотка имеет три катушки и одну пару полюсов (р),
Если учесть, что , то
Выражение определяет синхронное число оборотов магнитного
Если учесть, что , то
Выражение определяет синхронное число оборотов магнитного
ЭДС обмотки статора
ЭДС одной фазы обмотки ротора
К – обмоточный коэффициент
Ток ротора
ЭДС обмотки статора
ЭДС одной фазы обмотки ротора
К – обмоточный коэффициент
Ток ротора
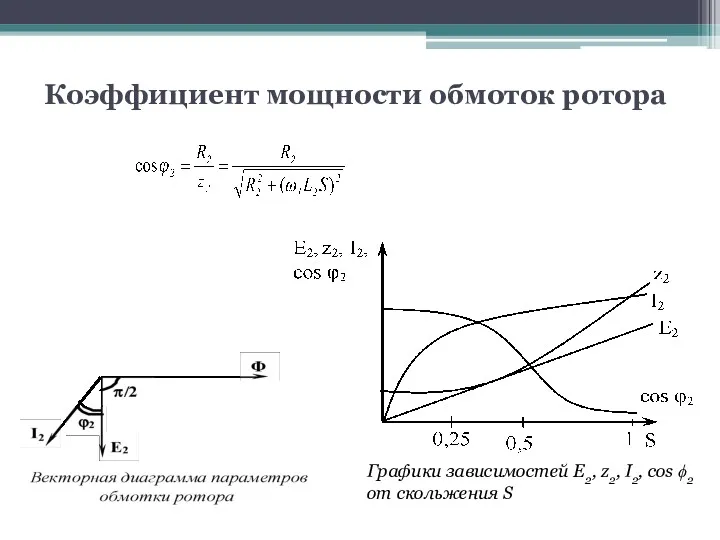
Коэффициент мощности обмоток ротора
Графики зависимостей Е2, z2, I2, cos ϕ2 от
Коэффициент мощности обмоток ротора
Графики зависимостей Е2, z2, I2, cos ϕ2 от
Вращающий момент асинхронного двигателя
В любом двигателе вращающий момент образуется за счет
Вращающий момент асинхронного двигателя
В любом двигателе вращающий момент образуется за счет
Рассмотрим режим двигателя, т.е. при скольжении, изменяющемся от 1 до 0.
Рассмотрим режим двигателя, т.е. при скольжении, изменяющемся от 1 до 0.
Критический момент не зависит от активного сопротивления ротора, но зависит от
Критический момент не зависит от активного сопротивления ротора, но зависит от
Участок характеристики, на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой
Участок характеристики, на котором скольжение изменяется от 0 до Sкр, соответствует устойчивой
С увеличением момента нагрузки на валу частота вращения ротора станет меньше,
С увеличением момента нагрузки на валу частота вращения ротора станет меньше,
Участок характеристики, на котором скольжение изменяется от Sкр до 1, соответствует неустойчивой работе
Участок характеристики, на котором скольжение изменяется от Sкр до 1, соответствует неустойчивой работе
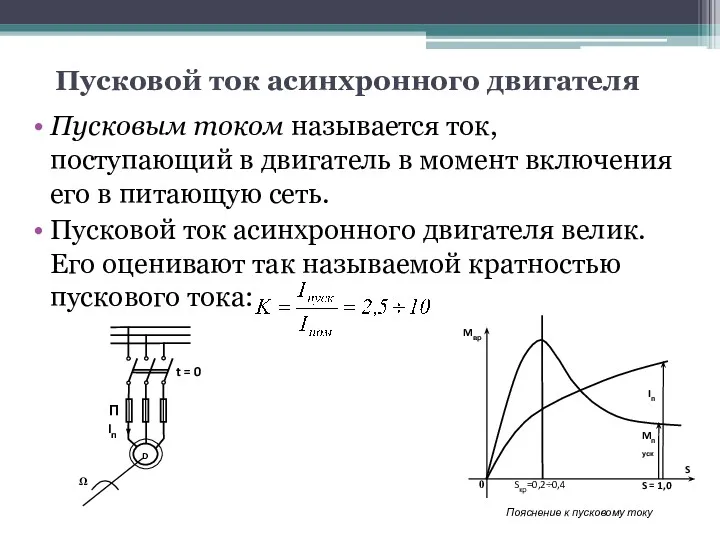
Пусковой ток асинхронного двигателя
Пусковым током называется ток, поступающий в двигатель в
Пусковой ток асинхронного двигателя
Пусковым током называется ток, поступающий в двигатель в
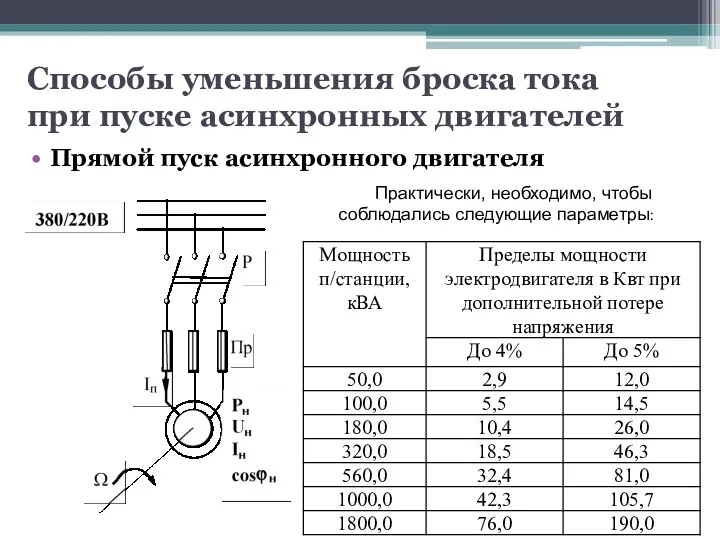
Способы уменьшения броска тока при пуске асинхронных двигателей
Прямой пуск асинхронного двигателя
Практически,
Способы уменьшения броска тока при пуске асинхронных двигателей
Прямой пуск асинхронного двигателя
Практически,
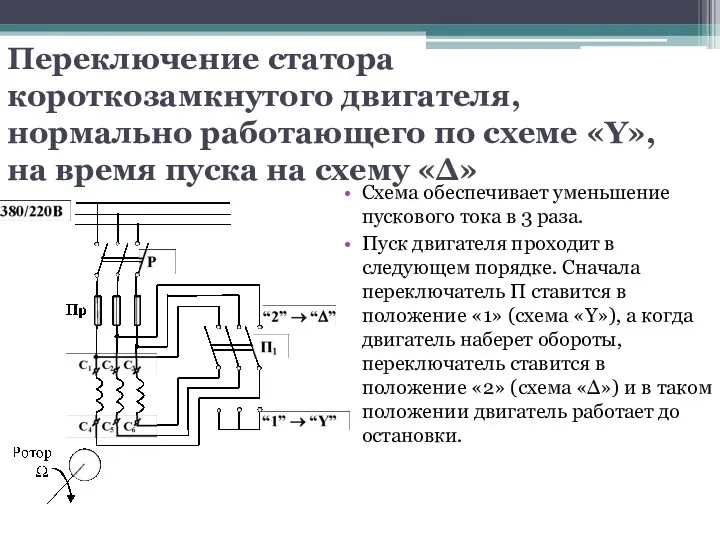
Переключение статора короткозамкнутого двигателя, нормально работающего по схеме «Y», на время
Переключение статора короткозамкнутого двигателя, нормально работающего по схеме «Y», на время
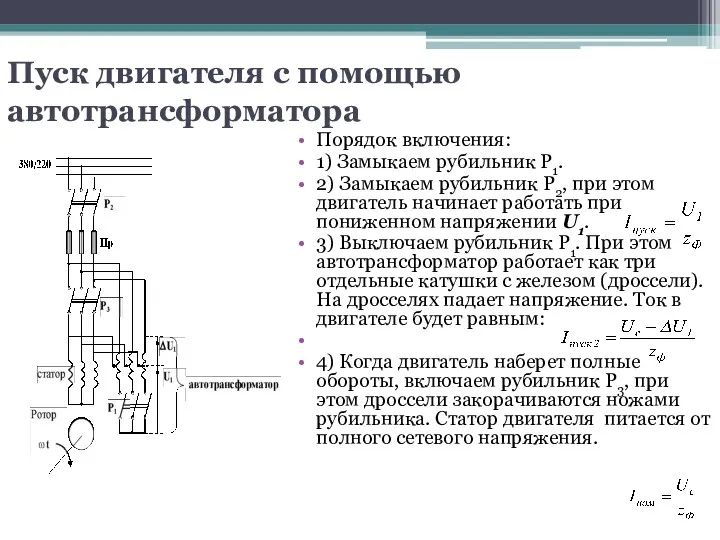
Пуск двигателя с помощью автотрансформатора
Порядок включения:
1) Замыкаем рубильник Р1.
2) Замыкаем рубильник
Пуск двигателя с помощью автотрансформатора
Порядок включения:
1) Замыкаем рубильник Р1.
2) Замыкаем рубильник
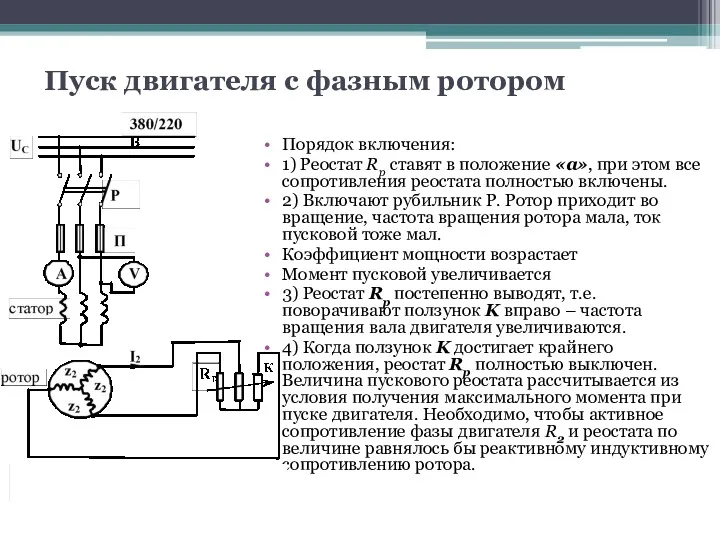
Пуск двигателя с фазным ротором
Порядок включения:
1) Реостат Rp ставят в положение
Пуск двигателя с фазным ротором
Порядок включения:
1) Реостат Rp ставят в положение
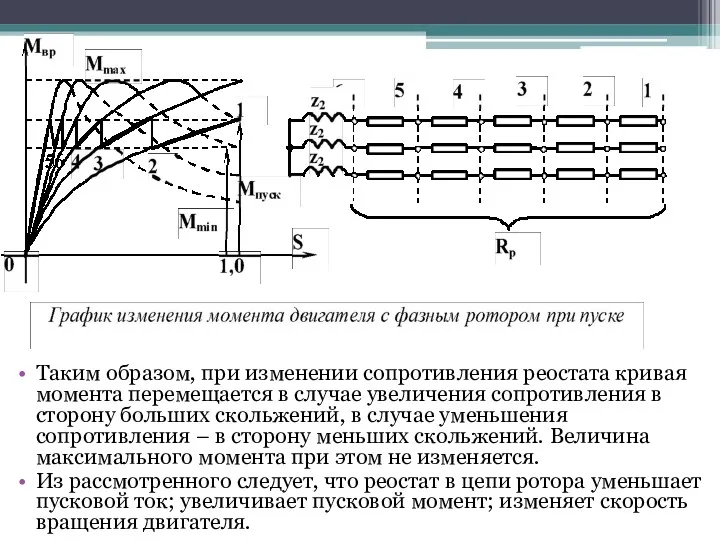
Таким образом, при изменении сопротивления реостата кривая момента перемещается в случае
Таким образом, при изменении сопротивления реостата кривая момента перемещается в случае
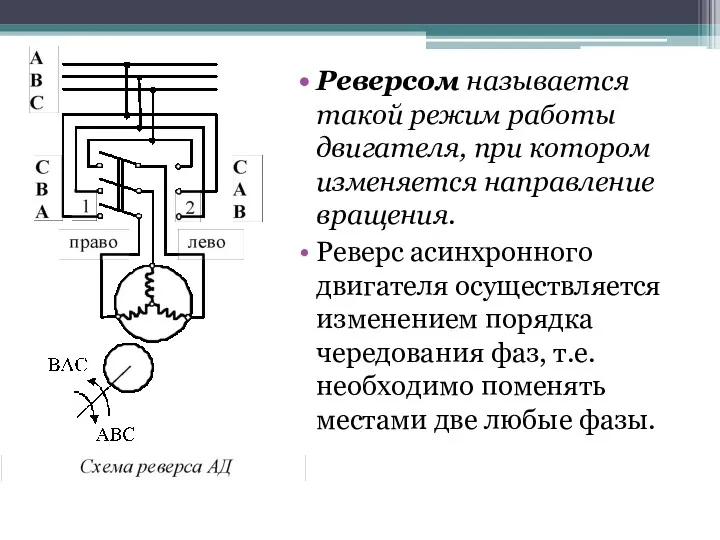
Реверсом называется такой режим работы двигателя, при котором изменяется направление вращения.
Реверс
Реверсом называется такой режим работы двигателя, при котором изменяется направление вращения.
Реверс
Регулирование частоты вращения вала асинхронного двигателя
Асинхронный двигатель почти не меняет
Регулирование частоты вращения вала асинхронного двигателя
Асинхронный двигатель почти не меняет
Трехфазный асинхронный двигатель с контактными кольцами и реостатом
Двигатель с контактными кольцами
Трехфазный асинхронный двигатель с контактными кольцами и реостатом
Двигатель с контактными кольцами
Регулирование частоты вращения вала двигателя с помощью изменения пар полюсов
Регулирование
Регулирование частоты вращения вала двигателя с помощью изменения пар полюсов
Регулирование
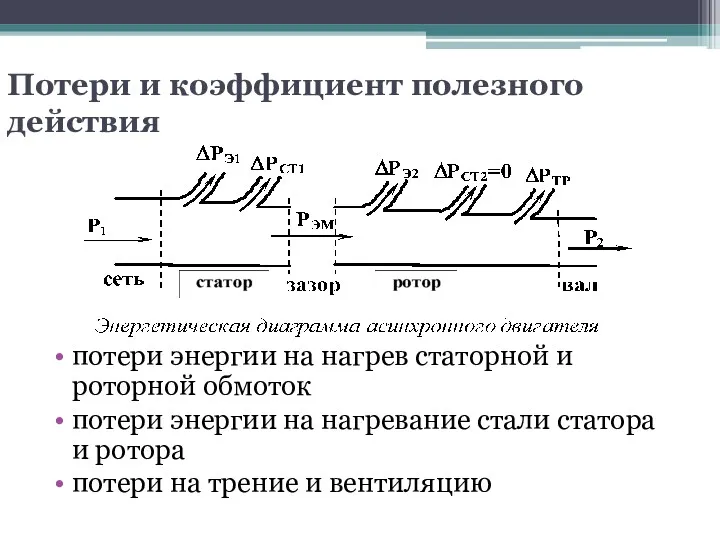
Потери и коэффициент полезного действия
потери энергии на нагрев статорной и
Потери и коэффициент полезного действия
потери энергии на нагрев статорной и
 Information and communication technology news. Neural processors
Information and communication technology news. Neural processors Самообразование ТРИЗ - школа творческой личности
Самообразование ТРИЗ - школа творческой личности Классы автомобилей которые участвуют в соревнованиях Формула студент
Классы автомобилей которые участвуют в соревнованиях Формула студент Григорий Остер - Детям
Григорий Остер - Детям Снежинки
Снежинки VII Всероссийский конкурс фоторабот Летнее вдохновение(дети дошкольного возраста) Детские улыбки
VII Всероссийский конкурс фоторабот Летнее вдохновение(дети дошкольного возраста) Детские улыбки Республика Ботсвана
Республика Ботсвана Системно-деятельностный подход
Системно-деятельностный подход Русская народная сказка Иван-царевич и Серый волк
Русская народная сказка Иван-царевич и Серый волк ООО Телерадиокомпания 2х2
ООО Телерадиокомпания 2х2 Усвоение - основа учебной деятельности
Усвоение - основа учебной деятельности РЖД сегодня
РЖД сегодня Культурологическая концепция П. Сорокина
Культурологическая концепция П. Сорокина Накшатры Девы
Накшатры Девы Ответственность в хозяйственном праве
Ответственность в хозяйственном праве знаете ли вы?
знаете ли вы?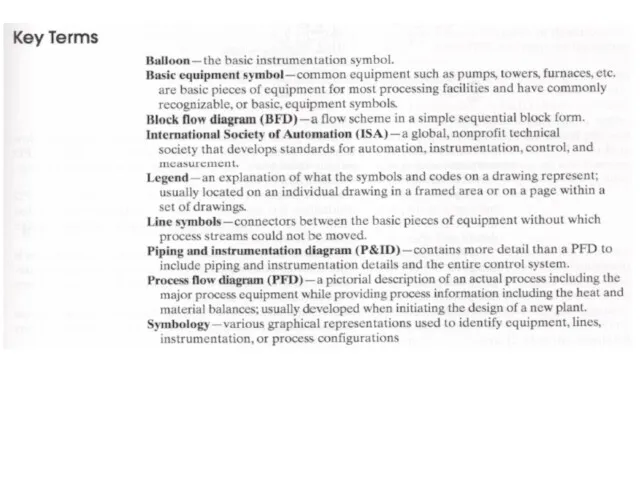 Process diagram and instrument sketching
Process diagram and instrument sketching Татарский Новый год
Татарский Новый год День смеха
День смеха Периферическая нервная система
Периферическая нервная система Мультимедийная презентация. Дидактическое пособие своими руками Чудо мешочки
Мультимедийная презентация. Дидактическое пособие своими руками Чудо мешочки Семейная реликвия
Семейная реликвия Класс Насекомые. Внешнее строение насекомых. Внутреннее строение майского жука
Класс Насекомые. Внешнее строение насекомых. Внутреннее строение майского жука Исследовательский проект Пока мы помним...( Бургоякова, Ильина, Петричук)
Исследовательский проект Пока мы помним...( Бургоякова, Ильина, Петричук) Потенциал электростатического поля. Разность потенциалов. Эквипотенциальные поверхности
Потенциал электростатического поля. Разность потенциалов. Эквипотенциальные поверхности СЮЖЕТНО-РОЛЕВАЯ ИГРА.
СЮЖЕТНО-РОЛЕВАЯ ИГРА. Язык JavaScript, введение
Язык JavaScript, введение Формирование компетенций в области инклюзивного образования у родителей учащихся I ступени общего среднего образования
Формирование компетенций в области инклюзивного образования у родителей учащихся I ступени общего среднего образования