- Асинхронные двигатели. Лекция 10

Содержание
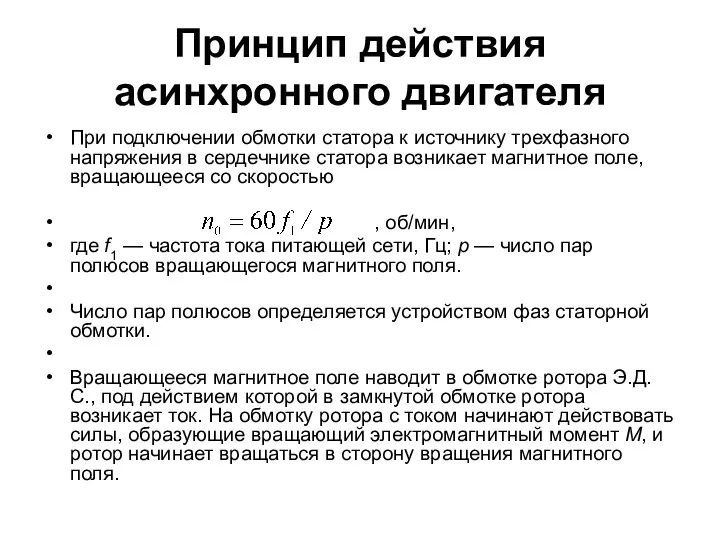
- 2. Принцип действия асинхронного двигателя При подключении обмотки статора к источнику трехфазного напряжения в сердечнике статора возникает
- 3. Величина вращающего момента определяется выражением , Н·м, где Р — номинальная мощность на валу двигателя, кВт;
- 4. Механическая характеристика асинхронного двигателя Механическая характеристика — зависимость частоты вращения ротора двигателя от электромагнитного момента. Механическая
- 5. Механическая характеристика асинхронного двигателя
- 6. Координаты точек механической характеристики Координаты точек находятся по следующим формулам: частота вращения магнитного поля , об/мин,
- 7. Перезагрузочная способность λ и краткость пускового момента β для данного двигателя берутся по каталогу или справочнику.
- 8. Пуск асинхронного двигателя Пуск асинхронных двигателей характеризуется большим пусковым током и малым пусковым моментом. В случае
- 9. Регулирование частоты вращения ротора асинхронного двигателя Под регулированием понимается принудительное изменение частоты вращения ротора при неизменном
- 10. Естественная (1) и искусственные (2, 3) механические характеристики
- 11. На рис. показаны естественная (1) и искусственные (2, 3) механические характеристики. Из рисунка видно, что при
- 12. Торможение асинхронного двигателя Для торможения асинхронного двигателя необходимо изменить направление электромагнитного момента на противоположное по отношению
- 13. Тормозные механические характеристики асинхронного двигателя
- 14. В режиме противовключения в момент остановки двигателя в точке 3 двигатель необходимо отключить от сети. В
- 16. Скачать презентацию
Принцип действия асинхронного двигателя
При подключении обмотки статора к источнику трехфазного
Принцип действия асинхронного двигателя
При подключении обмотки статора к источнику трехфазного
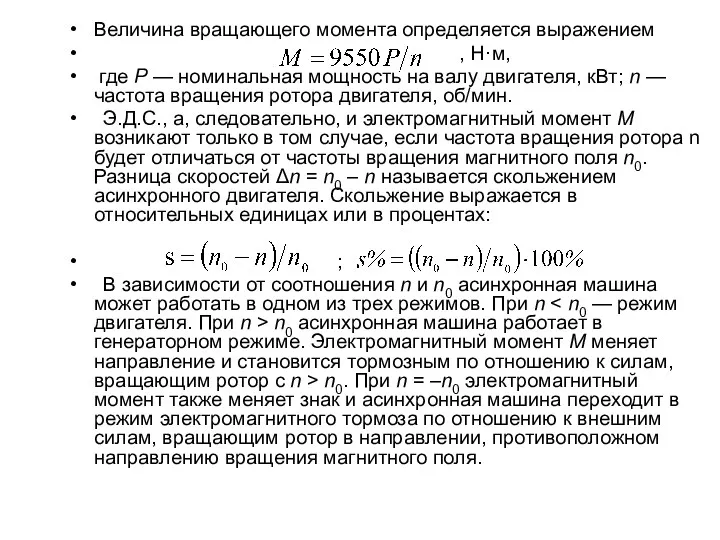
Величина вращающего момента определяется выражением
, Н·м,
где Р —
Величина вращающего момента определяется выражением
, Н·м,
где Р —
Механическая характеристика асинхронного двигателя
Механическая характеристика — зависимость частоты вращения ротора
Механическая характеристика асинхронного двигателя
Механическая характеристика — зависимость частоты вращения ротора

Механическая характеристика асинхронного двигателя
Механическая характеристика асинхронного двигателя
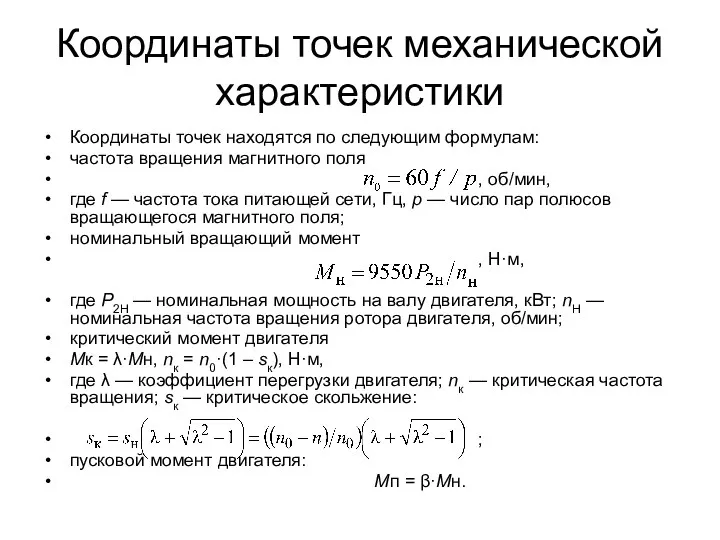
Координаты точек механической характеристики
Координаты точек находятся по следующим формулам:
частота вращения магнитного
Координаты точек механической характеристики
Координаты точек находятся по следующим формулам:
частота вращения магнитного
Перезагрузочная способность λ и краткость пускового момента β для данного двигателя
Перезагрузочная способность λ и краткость пускового момента β для данного двигателя
Пуск асинхронного двигателя
Пуск асинхронных двигателей характеризуется большим пусковым током и
Пуск асинхронного двигателя
Пуск асинхронных двигателей характеризуется большим пусковым током и
Регулирование частоты вращения ротора асинхронного двигателя
Под регулированием понимается принудительное изменение
Регулирование частоты вращения ротора асинхронного двигателя
Под регулированием понимается принудительное изменение

Естественная (1) и искусственные (2, 3) механические характеристики
Естественная (1) и искусственные (2, 3) механические характеристики
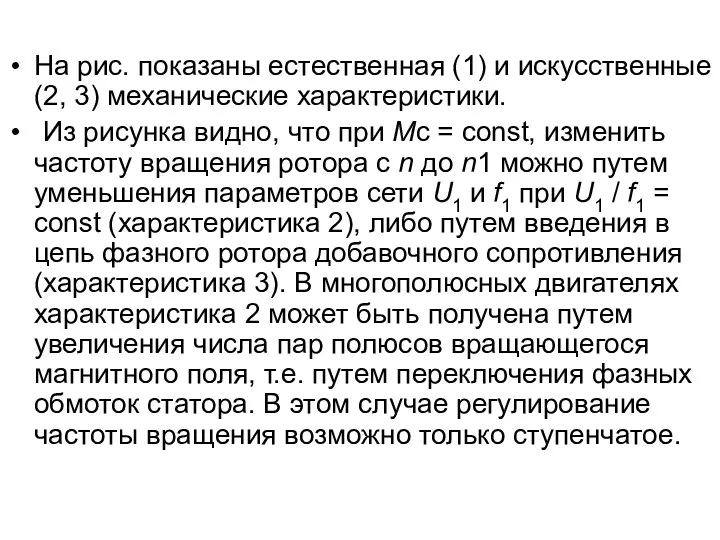
На рис. показаны естественная (1) и искусственные (2, 3) механические характеристики.
Из рисунка
На рис. показаны естественная (1) и искусственные (2, 3) механические характеристики.
Из рисунка
Торможение асинхронного двигателя
Для торможения асинхронного двигателя необходимо изменить направление электромагнитного
Торможение асинхронного двигателя
Для торможения асинхронного двигателя необходимо изменить направление электромагнитного
Тормозные механические характеристики асинхронного двигателя
Тормозные механические характеристики асинхронного двигателя
В режиме противовключения в момент остановки двигателя в точке 3 двигатель
В режиме противовключения в момент остановки двигателя в точке 3 двигатель
 День народного единства
День народного единства Роман А.С. Пушкина Евгений Онегин
Роман А.С. Пушкина Евгений Онегин Жесты народов мира
Жесты народов мира Основы оптимизации структуры и механических свойств конструкционных материалов
Основы оптимизации структуры и механических свойств конструкционных материалов Конспект урока с презентацией к обобщающему уроку по химии 8 класса на тему Соединения химических элементов
Конспект урока с презентацией к обобщающему уроку по химии 8 класса на тему Соединения химических элементов Интерпретация данных ГИС
Интерпретация данных ГИС Комплексные решения коррекции фигуры
Комплексные решения коррекции фигуры МБДОУ№23 Золотой петушок. Группа №1
МБДОУ№23 Золотой петушок. Группа №1 Операционные усилители
Операционные усилители Общие сведения о системах автоматики, телемеханики, связи, вычислительной и космической технике
Общие сведения о системах автоматики, телемеханики, связи, вычислительной и космической технике Обобщающий урок по теме Скелет человека 8 класс
Обобщающий урок по теме Скелет человека 8 класс конь Диск
конь Диск 20240119_urok_po_shveynomu_delu_v_8b_klasse
20240119_urok_po_shveynomu_delu_v_8b_klasse СРМ8_все_сжато
СРМ8_все_сжато Сохранение здоровья и формирование потребности в здоровом образе жизни
Сохранение здоровья и формирование потребности в здоровом образе жизни Обґрунтування проекту реконструкції водопровідних мереж села Абрикосівка Великокопанівської сільської ради
Обґрунтування проекту реконструкції водопровідних мереж села Абрикосівка Великокопанівської сільської ради Мои школьные будни (ಠ_ಠ)
Мои школьные будни (ಠ_ಠ) Диагностика воспитанности
Диагностика воспитанности Презентация для защиты реферата Реконструкция битвы на Калке
Презентация для защиты реферата Реконструкция битвы на Калке Политические партии в России на рубеже XIX-XX веков
Политические партии в России на рубеже XIX-XX веков Презентация к занятию по развитию мелкой моторики Мышкино государство подготовительная логопедическая группа
Презентация к занятию по развитию мелкой моторики Мышкино государство подготовительная логопедическая группа Презентация по теме Осложнения ЖКБ.
Презентация по теме Осложнения ЖКБ. Конспект урока в 7-ом классе по географии Движение воды в океане
Конспект урока в 7-ом классе по географии Движение воды в океане САПР технологических процессов. Лекция 1
САПР технологических процессов. Лекция 1 Правила техники безопасности при работе за компьютером
Правила техники безопасности при работе за компьютером ВИЧ. клинические случаи
ВИЧ. клинические случаи |Презентация 23 февраля
|Презентация 23 февраля zaschita_prav_potrebiteley
zaschita_prav_potrebiteley