- Autonomous underwater vehicles

Содержание
- 2. Main points Premisis Vehicle design Applications
- 3. Premisis AUVs are robots No operator control No umbilical or remote control
- 4. Vehicle design
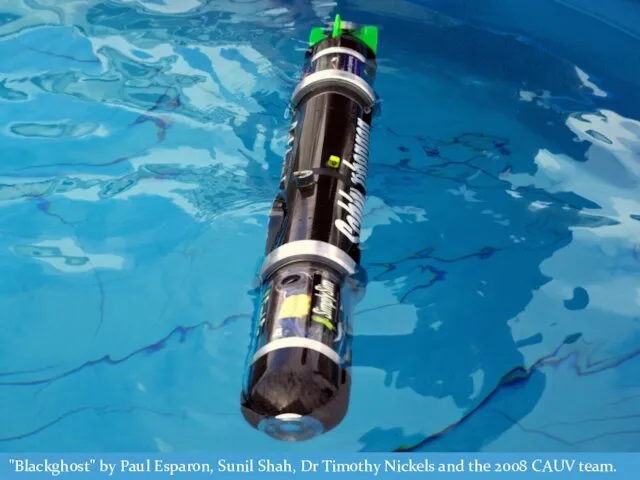
- 5. "Blackghost" by Paul Esparon, Sunil Shah, Dr Timothy Nickels and the 2008 CAUV team.
- 7. Sensors Compasses Depth sensors Sidescan and other sonars Magnetometers Thermistors Conductivity probes
- 8. Propulsion Gliding using buoyancy change Propellers powered by electric motors
- 9. Navigation Mostly dead reckoning Position is estimated via GPS
- 10. Applications Commecrial Research Military Air crash investigation
- 11. Commercial Mapping the seafloor Scouting for pipelaying Post-lay pipe surveys
- 12. Research Study of water bodies Sensor package delivery Taking measurements
- 13. Military Payload delivery Underwater warfare Mine countermeasures Communication\Navigation network nodes
- 14. Air crash investigation Search for debris
- 16. Скачать презентацию
Main points
Premisis
Vehicle design
Applications
Main points
Premisis
Vehicle design
Applications
Premisis
AUVs are robots
No operator control
No umbilical or remote control
Premisis
AUVs are robots
No operator control
No umbilical or remote control

Vehicle design
Vehicle design
"Blackghost" by Paul Esparon, Sunil Shah, Dr Timothy Nickels and the
"Blackghost" by Paul Esparon, Sunil Shah, Dr Timothy Nickels and the

Sensors
Compasses
Depth sensors
Sidescan and other sonars
Magnetometers
Thermistors
Conductivity probes
Sensors
Compasses
Depth sensors
Sidescan and other sonars
Magnetometers
Thermistors
Conductivity probes
Propulsion
Gliding using buoyancy change
Propellers powered by electric motors
Propulsion
Gliding using buoyancy change
Propellers powered by electric motors
Navigation
Mostly dead reckoning
Position is estimated via GPS
Navigation
Mostly dead reckoning
Position is estimated via GPS

Applications
Commecrial
Research
Military
Air crash investigation
Applications
Commecrial
Research
Military
Air crash investigation
Commercial
Mapping the seafloor
Scouting for pipelaying
Post-lay pipe surveys
Commercial
Mapping the seafloor
Scouting for pipelaying
Post-lay pipe surveys
Research
Study of water bodies
Sensor package delivery
Taking measurements
Research
Study of water bodies
Sensor package delivery
Taking measurements
Military
Payload delivery
Underwater warfare
Mine countermeasures
Communication\Navigation network nodes
Military
Payload delivery
Underwater warfare
Mine countermeasures
Communication\Navigation network nodes
Air crash investigation
Search for debris
Air crash investigation
Search for debris
 Презентация к программе доп.образования в ДОУ Занимательный английских
Презентация к программе доп.образования в ДОУ Занимательный английских Электростатика. Закон Кулона
Электростатика. Закон Кулона Global warming
Global warming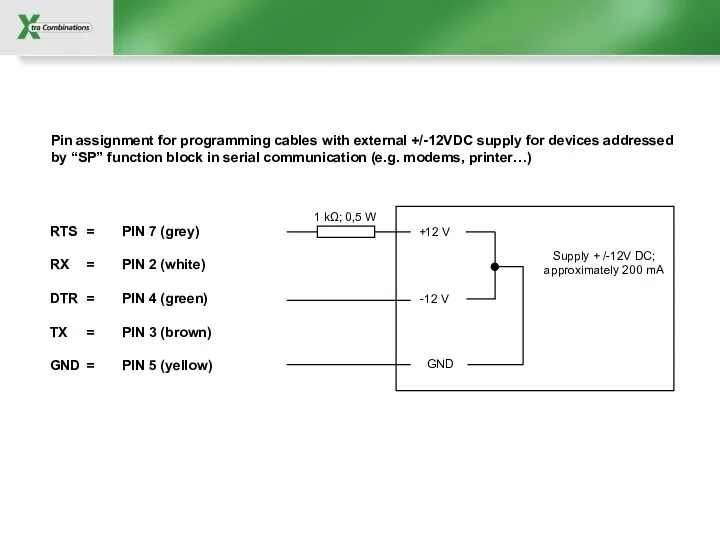 Pin assignment for programming cables with external +/-12VDC supply for devices addressed by “SP” function block
Pin assignment for programming cables with external +/-12VDC supply for devices addressed by “SP” function block Кафе “Время”
Кафе “Время” ГИМНАСТИКА ДЛЯ ГЛАЗВЕСЕЛАЯ НЕДЕЛЬКА
ГИМНАСТИКА ДЛЯ ГЛАЗВЕСЕЛАЯ НЕДЕЛЬКА Царство Растений. Тест. 5 класс
Царство Растений. Тест. 5 класс Презентация к уроку технология. 4 класс
Презентация к уроку технология. 4 класс Государственное бюджетное профессиональное образовательное учреждение Московской области Колледж Коломна
Государственное бюджетное профессиональное образовательное учреждение Московской области Колледж Коломна Введение в патологию. Содержание и задачи предмета
Введение в патологию. Содержание и задачи предмета Исследование влияния активированных минеральных добавок на эксплуатационные свойства портландцемента
Исследование влияния активированных минеральных добавок на эксплуатационные свойства портландцемента Технологии сборочного производства
Технологии сборочного производства Программирование параметров котла
Программирование параметров котла Расчет характеристик движения транспортных потоков
Расчет характеристик движения транспортных потоков Презентация Волшебный компьютер для проверки знаний учащихся 3кл.
Презентация Волшебный компьютер для проверки знаний учащихся 3кл. Химиопрофилактика туберкулеза. Санитарная профилактика
Химиопрофилактика туберкулеза. Санитарная профилактика Новинки электронных технологий представленные осенью 2019 года
Новинки электронных технологий представленные осенью 2019 года Внутриполитические условия для развития парадипломатии. Этническая и национальная идентичность. (Часть 1)
Внутриполитические условия для развития парадипломатии. Этническая и национальная идентичность. (Часть 1) Технология капитального ремонта МГ Горький – центр
Технология капитального ремонта МГ Горький – центр Районирование территории. Типология жилища
Районирование территории. Типология жилища Презентация образовательной программы Акварелька
Презентация образовательной программы Акварелька Дистанционная защита линии REL670. Схемы связи ZCPSCH, ZCRWPSCH
Дистанционная защита линии REL670. Схемы связи ZCPSCH, ZCRWPSCH Бурение скважин с кустовых площадок
Бурение скважин с кустовых площадок Введение в R
Введение в R Планиметрия. Аксиомы стереометрии
Планиметрия. Аксиомы стереометрии Перша світова війна. Період громадянської війни та української революції. Микола Куліш
Перша світова війна. Період громадянської війни та української революції. Микола Куліш 20231015_okeany_i_morya
20231015_okeany_i_morya Государственные ценные бумаги. (Тема 5)
Государственные ценные бумаги. (Тема 5)