Автоматическое регулирование технологических процессов. Системы автоматического регулирования презентация
- Автоматическое регулирование технологических процессов. Системы автоматического регулирования

Содержание
- 2. Параметры для регулирования технологических процессов Для того чтобы технологическое оборудование работало в требуемом режиме, т.е. с
- 3. В качестве регулируемых величин следует выбирать параметры, непосредственно влияющие на качество готовой продукции, на весь ход
- 4. В целом назначение системы автоматического регулирования любого технологического процесса состоит в достижении максимальной производительности оборудования при
- 5. Прямой. Регулируется непосредственно регулируемый параметр. Чувствительный элемент воздействует непосредственно на рабочий орган, осуществляющий воздействие на объект.
- 6. Замкнутые системы автоматического регулирования Промышленную установку, в которой автоматически регулируется технологический процесс, называют объектом регулирования. Устройство,
- 7. Структурная схема автоматического регулятора Автоматический регулятор включает в себя чувствительный элемент ЧЭ, реагирующий на изменение регулируемого
- 8. Далее сигнал х3 из датчика регулятора ДР поступает в элемент сравнения ЭС. Элемент сравнения предназначен для
- 9. К внешним возмущающим воздействиям относятся возмущения, возникающие при установке нового задания регулятора (вносимые в регулятор), нарушения
- 10. Устойчивость – способность системы к уменьшению величины возникающих в ней отклонений регулируемого параметра при любых возмущающих
- 11. Классификация систем автоматического регулирования
- 12. Классификация по характеру изменения величин Системы непрерывного действия. Выходная величина изменяется плавно при плавном изменении входной
- 13. Классификация по характеру изменения величин Системы дискретного действия. Выходная величина изменяется дискретно, т. е. скачкообразно, даже
- 14. Классификация по характеру изменения величин Релейные системы регулирования имеют в качестве одного из основных звеньев реле,
- 15. Классификация по математическим признакам Линейные системы. Все элементы описываются линейными алгебраическими и дифференциальными уравнениями. Нелинейные системы.
- 16. Классификация по способу настройки Неадаптивные системы. Адаптивные системы. Адаптивные системы способны при выработке управляющего воздействия дополнительно
- 17. Классификация по типу ошибки в статике Статические САР. Управляемая переменная в установившемся режиме зависит от величины
- 18. Классификация в зависимости от числа управляемых переменных Одномерные. САР с одним входом и одним выходом. Многомерные.
- 19. Регулятор поддерживает регулируемую величину с определенной степенью точности постоянной независимо от изменения нагрузки, т.е. внешних факторов,
- 20. Системы автоматической стабилизации
- 21. Это системы, предназначенные для изменения управляемой переменной в соответствии с изменением другой переменной, которая действует на
- 22. Системы программного регулирования Это системы, алгоритм функционирования которых содержит предписание изменять управляемую переменную в соответствии с
- 23. Осуществляют более сложные задачи: сами находят оптимальную настройку, программу действия, закон следования, структуру системы и т.п.
- 24. Независимо от числа и характера внешних факторов, оказывающих воздействие на регулируемую величину, процесс регулирования осуществляется лишь
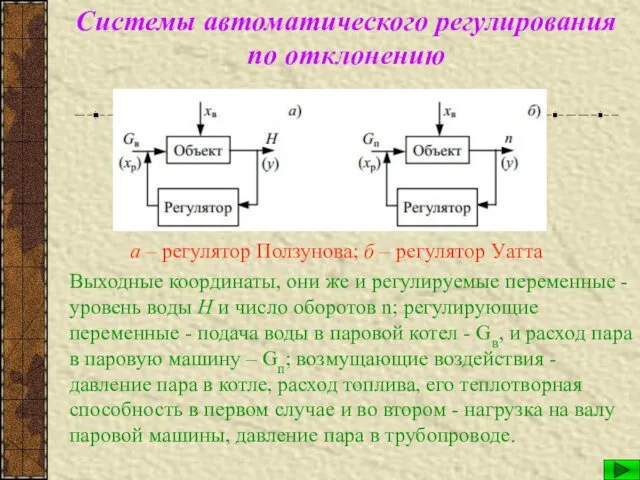
- 25. Первый промышленный регулятор был изобретен в 1765 г. И. Ползуновым для созданной им паровой машины. Системы
- 26. Практически одновременно с И. Ползуновым в 1784 г. Джеймс Уатт сконструировал центробежный регулятор числа оборотов вала
- 27. Системы автоматического регулирования по отклонению Выходные координаты, они же и регулируемые переменные - уровень воды Н
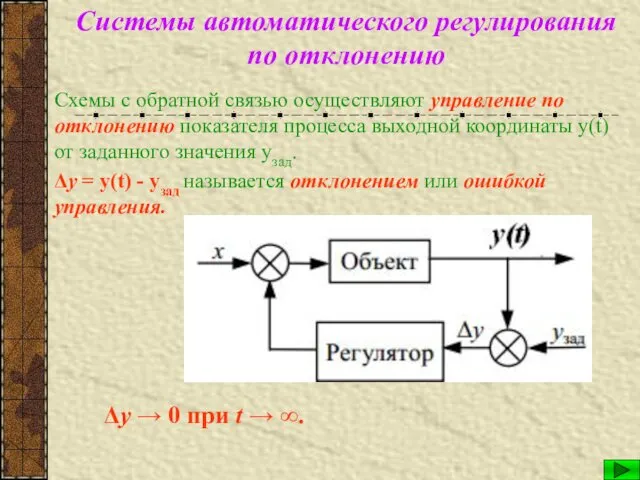
- 28. Системы автоматического регулирования по отклонению В зависимости от значения выходного сигнала объекта регулятор изменяет его входной
- 29. Системы автоматического регулирования по отклонению Схемы с обратной связью осуществляют управление по отклонению показателя процесса выходной
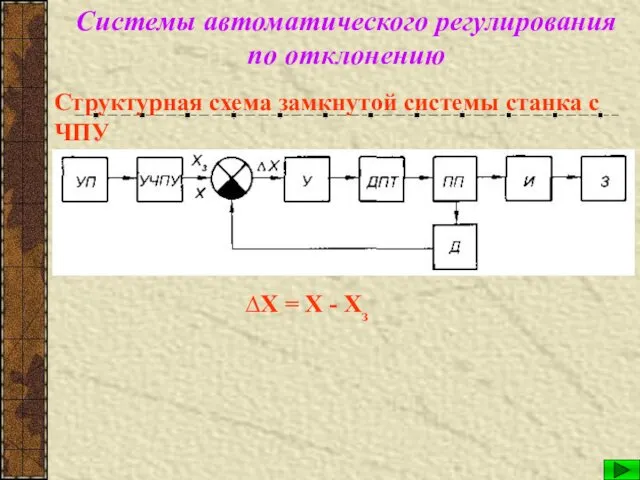
- 30. Системы автоматического регулирования по отклонению Структурная схема замкнутой системы станка с ЧПУ ∆X = X -
- 31. Системы автоматического регулирования по возмущению Работают по принципу устранения внешних возмущающих воздействий на объект регулирования путем
- 32. Системы автоматического регулирования по возмущению Рассматриваемый принцип регулирования впервые был предложен в 1830 г. французским инженером
- 33. Системы автоматического регулирования по возмущению Система автоматической коррекции настройки станка на размер по результатам замера износа
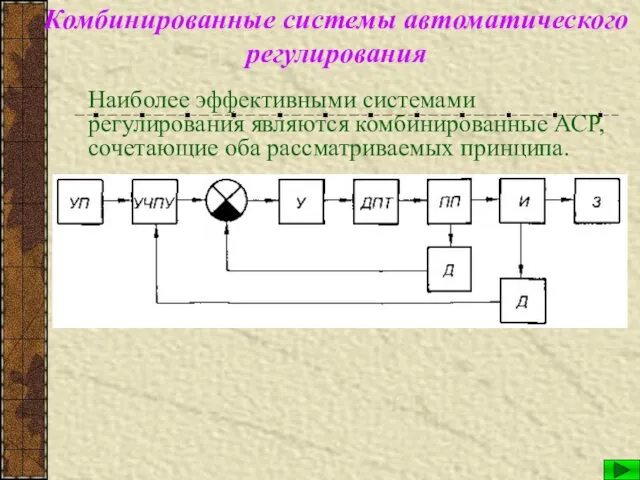
- 34. Комбинированные системы автоматического регулирования Наиболее эффективными системами регулирования являются комбинированные АСР, сочетающие оба рассматриваемых принципа.
- 35. Комбинированные системы автоматического регулирования Наиболее эффективными системами регулирования являются комбинированные АСР, сочетающие оба рассматриваемых принципа.
- 36. Дискретные системы
- 38. Скачать презентацию
Параметры для регулирования технологических процессов
Для того чтобы технологическое оборудование работало в
Параметры для регулирования технологических процессов
Для того чтобы технологическое оборудование работало в
В качестве регулируемых величин следует выбирать параметры, непосредственно влияющие на качество
В качестве регулируемых величин следует выбирать параметры, непосредственно влияющие на качество
В целом назначение системы автоматического регулирования любого технологического процесса состоит в
В целом назначение системы автоматического регулирования любого технологического процесса состоит в
Прямой. Регулируется непосредственно регулируемый параметр. Чувствительный элемент воздействует непосредственно на рабочий
Прямой. Регулируется непосредственно регулируемый параметр. Чувствительный элемент воздействует непосредственно на рабочий
Замкнутые системы автоматического регулирования
Промышленную установку, в которой автоматически регулируется технологический
Замкнутые системы автоматического регулирования
Промышленную установку, в которой автоматически регулируется технологический
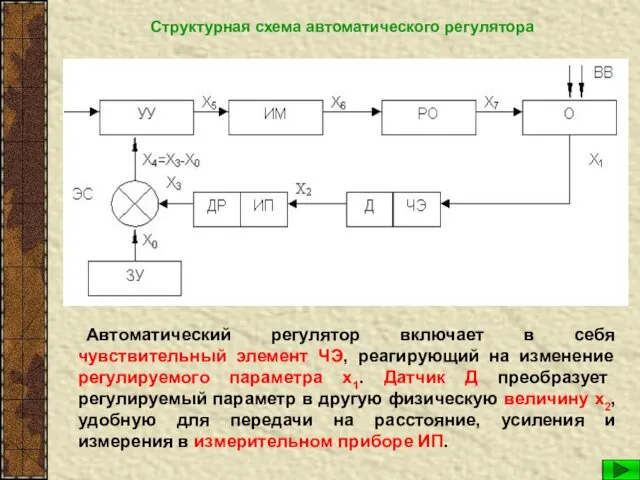
Структурная схема автоматического регулятора
Автоматический регулятор включает в себя чувствительный элемент
Структурная схема автоматического регулятора
Автоматический регулятор включает в себя чувствительный элемент
Далее сигнал х3 из датчика регулятора ДР поступает в элемент сравнения
Далее сигнал х3 из датчика регулятора ДР поступает в элемент сравнения
К внешним возмущающим воздействиям относятся возмущения, возникающие при установке нового задания
К внешним возмущающим воздействиям относятся возмущения, возникающие при установке нового задания
Устойчивость – способность системы к уменьшению величины возникающих в ней отклонений
Устойчивость – способность системы к уменьшению величины возникающих в ней отклонений
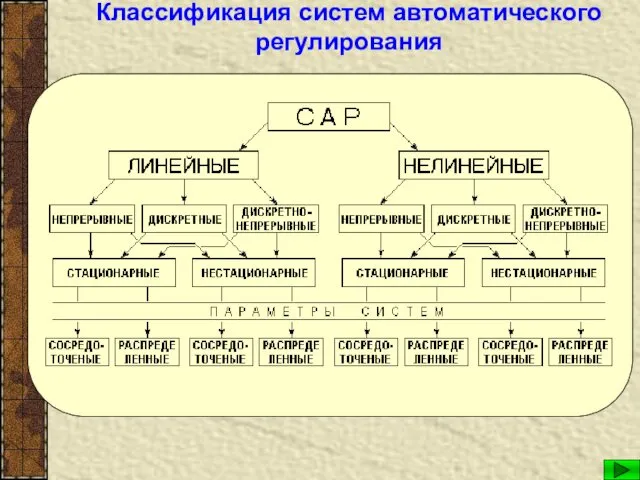
Классификация систем автоматического регулирования
Классификация систем автоматического регулирования
Классификация по характеру изменения величин
Системы непрерывного действия. Выходная величина изменяется плавно
Классификация по характеру изменения величин
Системы непрерывного действия. Выходная величина изменяется плавно
Классификация по характеру изменения величин
Системы дискретного действия. Выходная величина изменяется дискретно,
Классификация по характеру изменения величин
Системы дискретного действия. Выходная величина изменяется дискретно,
Классификация по характеру изменения величин
Релейные системы регулирования имеют в качестве одного
Классификация по характеру изменения величин
Релейные системы регулирования имеют в качестве одного
Классификация по математическим признакам
Линейные системы. Все элементы описываются линейными алгебраическими
Классификация по математическим признакам
Линейные системы. Все элементы описываются линейными алгебраическими
Классификация по способу настройки
Неадаптивные системы.
Адаптивные системы.
Адаптивные системы способны при выработке
Классификация по способу настройки
Неадаптивные системы.
Адаптивные системы.
Адаптивные системы способны при выработке
Классификация по типу ошибки в статике
Статические САР. Управляемая переменная в
Классификация по типу ошибки в статике
Статические САР. Управляемая переменная в
Классификация в зависимости от числа управляемых переменных
Одномерные. САР с одним
Классификация в зависимости от числа управляемых переменных
Одномерные. САР с одним
Регулятор поддерживает регулируемую величину с определенной степенью точности постоянной независимо от
Регулятор поддерживает регулируемую величину с определенной степенью точности постоянной независимо от

Системы автоматической стабилизации
Системы автоматической стабилизации
Это системы, предназначенные для изменения управляемой переменной в соответствии с изменением
Это системы, предназначенные для изменения управляемой переменной в соответствии с изменением
Системы программного регулирования
Это системы, алгоритм функционирования которых содержит предписание изменять управляемую
Системы программного регулирования
Это системы, алгоритм функционирования которых содержит предписание изменять управляемую
Осуществляют более сложные задачи: сами находят оптимальную настройку, программу действия, закон
Осуществляют более сложные задачи: сами находят оптимальную настройку, программу действия, закон
Независимо от числа и характера внешних факторов, оказывающих воздействие на регулируемую
Независимо от числа и характера внешних факторов, оказывающих воздействие на регулируемую
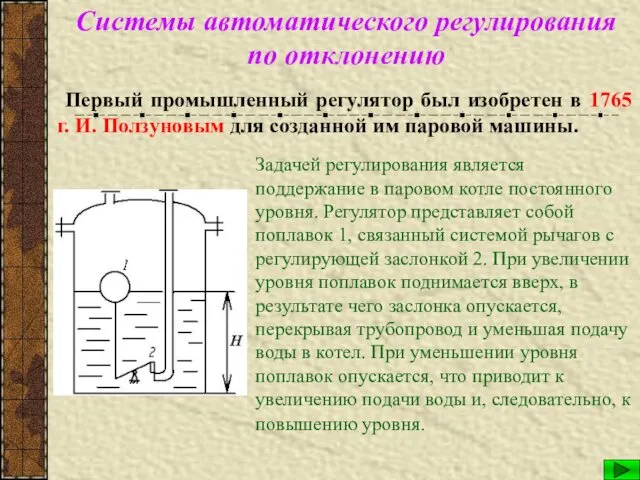
Первый промышленный регулятор был изобретен в 1765 г. И. Ползуновым для
Первый промышленный регулятор был изобретен в 1765 г. И. Ползуновым для
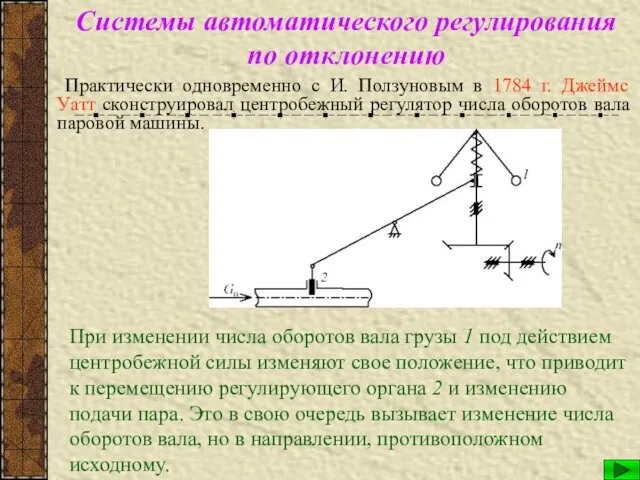
Практически одновременно с И. Ползуновым в 1784 г. Джеймс Уатт сконструировал
Практически одновременно с И. Ползуновым в 1784 г. Джеймс Уатт сконструировал
Системы автоматического регулирования по отклонению
Выходные координаты, они же и регулируемые переменные
Системы автоматического регулирования по отклонению
Выходные координаты, они же и регулируемые переменные
Системы автоматического регулирования по отклонению
В зависимости от значения выходного сигнала объекта
Системы автоматического регулирования по отклонению
В зависимости от значения выходного сигнала объекта
Системы автоматического регулирования по отклонению
Схемы с обратной связью осуществляют управление по
Системы автоматического регулирования по отклонению
Схемы с обратной связью осуществляют управление по
Системы автоматического регулирования по отклонению
Структурная схема замкнутой системы станка с ЧПУ
Системы автоматического регулирования по отклонению
Структурная схема замкнутой системы станка с ЧПУ
Системы автоматического регулирования по возмущению
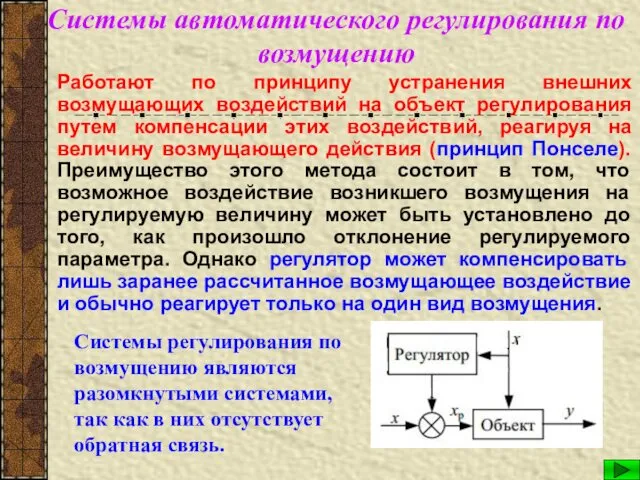
Работают по принципу устранения внешних возмущающих воздействий
Системы автоматического регулирования по возмущению
Работают по принципу устранения внешних возмущающих воздействий
Системы автоматического регулирования по возмущению
Рассматриваемый принцип регулирования впервые был предложен в
Системы автоматического регулирования по возмущению
Рассматриваемый принцип регулирования впервые был предложен в
Системы автоматического регулирования по возмущению
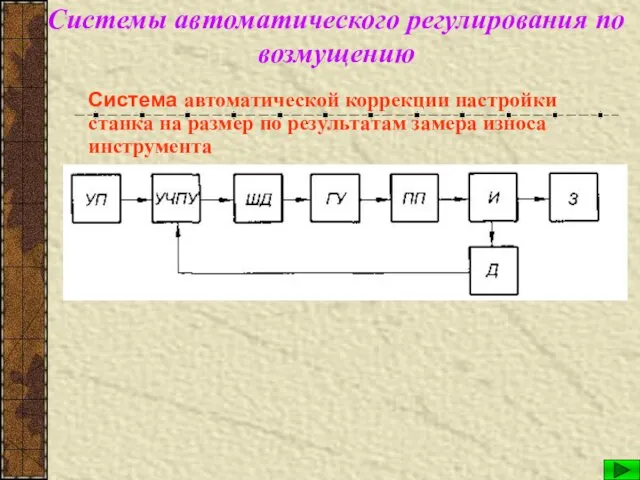
Система автоматической коррекции настройки станка на размер
Системы автоматического регулирования по возмущению
Система автоматической коррекции настройки станка на размер
Комбинированные системы автоматического регулирования
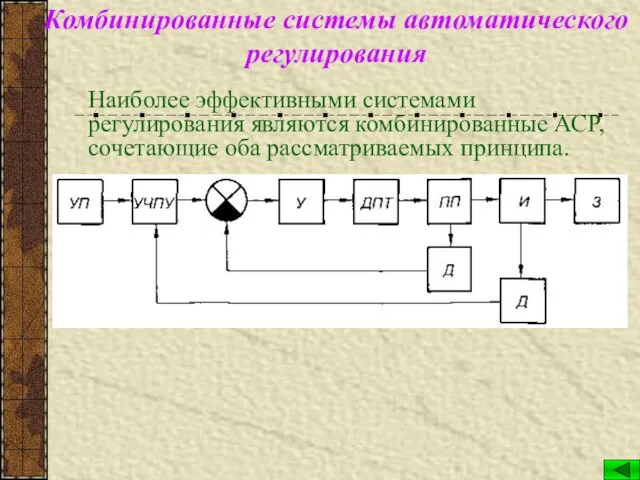
Наиболее эффективными системами регулирования являются комбинированные АСР, сочетающие
Комбинированные системы автоматического регулирования
Наиболее эффективными системами регулирования являются комбинированные АСР, сочетающие
Комбинированные системы автоматического регулирования
Наиболее эффективными системами регулирования являются комбинированные АСР, сочетающие
Комбинированные системы автоматического регулирования
Наиболее эффективными системами регулирования являются комбинированные АСР, сочетающие

Дискретные системы
Дискретные системы
 Пчеловодство
Пчеловодство Трудные дыхательные пути
Трудные дыхательные пути Трансформатор. Режимы работы
Трансформатор. Режимы работы Зовнішній вигляд вчителя
Зовнішній вигляд вчителя Проект участка механического цеха по изготовлению детали Обойма подшипника
Проект участка механического цеха по изготовлению детали Обойма подшипника Профессиональные стандарты в лесной отрасли
Профессиональные стандарты в лесной отрасли Презентация проекта педагогической деятельности Неделя здоровья
Презентация проекта педагогической деятельности Неделя здоровья Презентация Роль педагога - психолога в формировании культуры здорового образа жизни дошкольников Диск
Презентация Роль педагога - психолога в формировании культуры здорового образа жизни дошкольников Диск Управление проектами в бизнес-коммуникациях
Управление проектами в бизнес-коммуникациях Укрепление финансовой устойчивости
Укрепление финансовой устойчивости Проект Дольмены
Проект Дольмены Портфолио педагога Мамаевой Дианы Сергеевны
Портфолио педагога Мамаевой Дианы Сергеевны Этнометодологические исследования. Инициирование смеха
Этнометодологические исследования. Инициирование смеха Внеурочная деятельность 4 класс.Презентация Умелые руки(крокусы) Диск
Внеурочная деятельность 4 класс.Презентация Умелые руки(крокусы) Диск Электрические системы запуска ГТД и системы зажигания топлива
Электрические системы запуска ГТД и системы зажигания топлива исследовательская работа Зачем ежу яблоки
исследовательская работа Зачем ежу яблоки Introduction to Closed Cycle Cooling Systems (for MICE)
Introduction to Closed Cycle Cooling Systems (for MICE) Интерактивная викторина Тема дружбы в литературных произведениях
Интерактивная викторина Тема дружбы в литературных произведениях Рождественский венок из природного материала (Новогодний декор)
Рождественский венок из природного материала (Новогодний декор) Страны НАТО. Анимированный трафарет
Страны НАТО. Анимированный трафарет Девиантное поведение личности
Девиантное поведение личности Общие понятия о здоровье как основной ценности человека
Общие понятия о здоровье как основной ценности человека Строки. Специальные символы (JavaScript)
Строки. Специальные символы (JavaScript) Презентация М.В. Ломоносов - великий сын России 8-9 класс.
Презентация М.В. Ломоносов - великий сын России 8-9 класс. Презентация ко дню космонавтики
Презентация ко дню космонавтики Гражданская война в России
Гражданская война в России Химия биогенных элементов
Химия биогенных элементов Препарат граундфікс - коваль ваших врожаїв
Препарат граундфікс - коваль ваших врожаїв