- Автоматизированное регулирование скорости движения отцепов АРС

Содержание
- 2. Одним из наиболее сложных технологических процессов работы сортировочной горки является регулирование скорости движения отцепов на спускной
- 3. Для решения задачи автоматизированного регулирования скорости движения отцепов во ВНИИЖТе с конца пятидесятых годов велась разработка
- 5. Первую опытную установку системы АРС-ЦНИИ, разработанной во ВНИИЖТе, осуществили на станции Лосиноостровская в 1961 году. В
- 6. В настоящее время в России проектируются и строятся две современные микропроцессорные системы АРС: Система АРС-ГТСС, входящая
- 7. Для функционирования системы АРС необходимы: Замедлители интервальных и парковых тормозных позиций с управляющей аппаратурой Устройства контроля
- 8. Структурная схема КТС АРС ГТСС
- 9. Данные описателя отцепа (номер, вес, длина) с измерительного участка Шкаф УВК, ДК Данные о состоянии КЗП
- 10. Шкафы АРС Состояние РЦ перед замедлителем и замедлителя, после замедлителя Фактическая скорость Команда включения автоматического режима
- 11. Команда управления Команда управления усиленным по мощности сигналом
- 12. Плата МК-АРС Светодиод «Автоматика» Микрореле (команды управления) Flash память (алгоритмы торможения) Контроллер платы «TERN» Настроечные переключатели
- 13. Стативы с контрольными реле
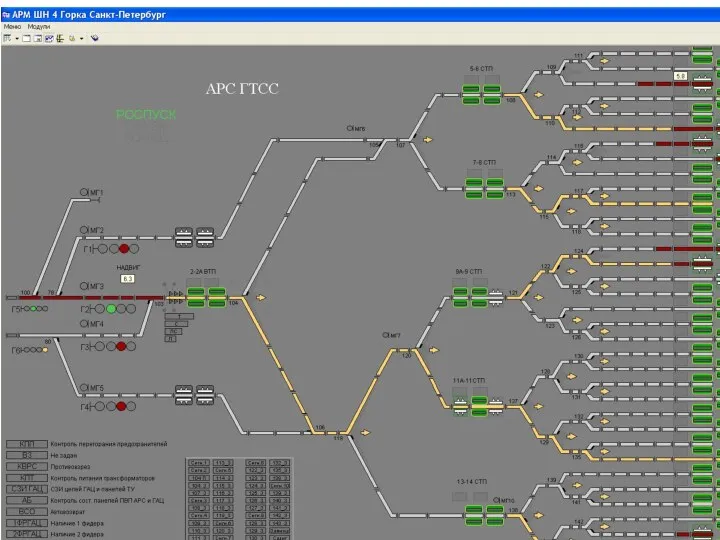
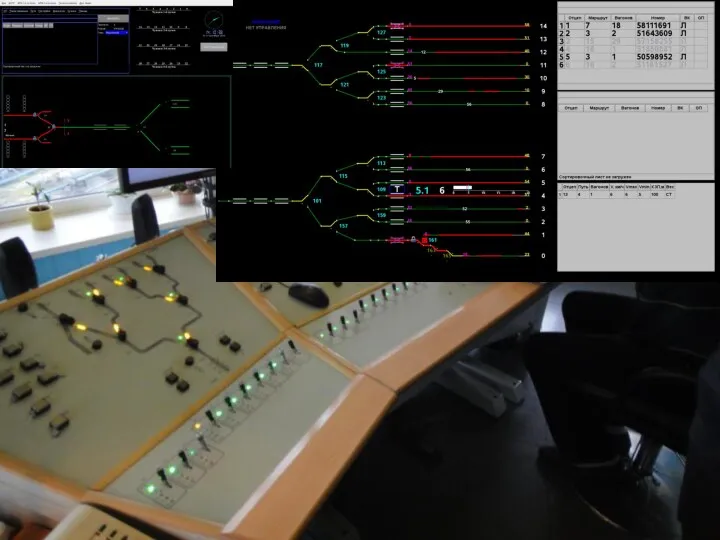
- 14. АРМ ДСПГ АРМ ДСПГо Коммутаторы управления замедлителями Пульт выбора режимов работы Пульт выбора индикации скорости ТП
- 15. На мониторах выводится информация: Маршрут, вес, длина отцепа Расчетная и фактическая скорости Режим работы АРС для
- 17. Фактическая скорость Расчетная скорость Упреждение (скорость при которой подается команда на оттормаживание) Занятие РЦ Команды торможения
- 18. Схема управления замедлителем с управляющей аппаратурой ВУПЗ-72 (аналогично и с ВУПЗ-05 М)
- 20. РДК-77
- 22. Схема управления замедлителем с управляющей аппаратурой ВУПЗ-Э
- 23. Давление воздуха по ступеням торможения для ВУПЗ-Э Кодирование команд торможения для ВУПЗ-Э
- 24. Воздухопроводная сеть замедлителя 1 – пневмокамера, 2 – кран, 3 – ВУПЗ, 4 – трубопровод, 5
- 25. КСАУ СП структурная схема
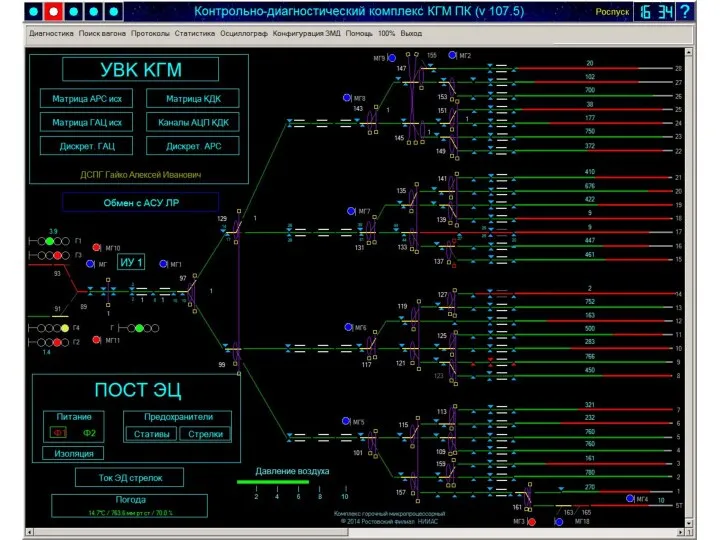
- 26. Подсистема АРС, решая задачи интервального (на 1ТП), интервально-прицельного (на 2 ТП) и прицельного (на 3 ТП)
- 30. Скачать презентацию
Одним из наиболее сложных технологических процессов работы сортировочной горки является
Одним из наиболее сложных технологических процессов работы сортировочной горки является
Для решения задачи автоматизированного регулирования скорости движения отцепов во ВНИИЖТе
Для решения задачи автоматизированного регулирования скорости движения отцепов во ВНИИЖТе
Первую опытную установку системы АРС-ЦНИИ, разработанной во ВНИИЖТе, осуществили на
Первую опытную установку системы АРС-ЦНИИ, разработанной во ВНИИЖТе, осуществили на
В настоящее время в России проектируются и строятся две современные микропроцессорные
В настоящее время в России проектируются и строятся две современные микропроцессорные
Для функционирования системы АРС необходимы:
Замедлители интервальных и парковых тормозных позиций с
Для функционирования системы АРС необходимы:
Замедлители интервальных и парковых тормозных позиций с
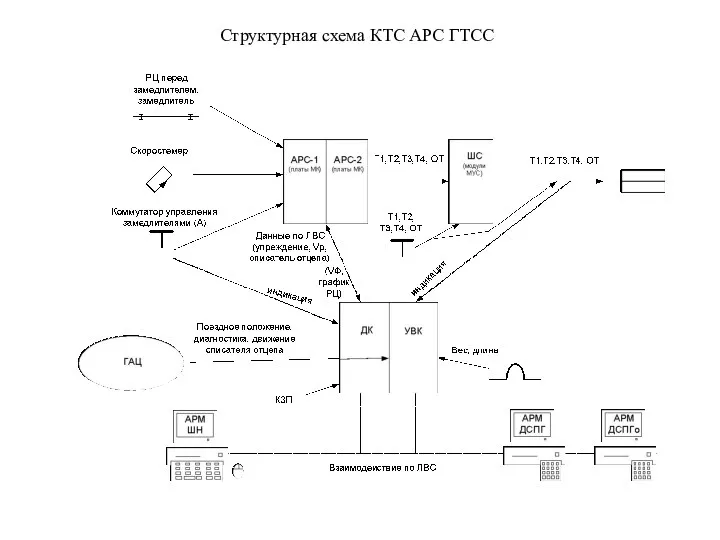
Структурная схема КТС АРС ГТСС
Структурная схема КТС АРС ГТСС
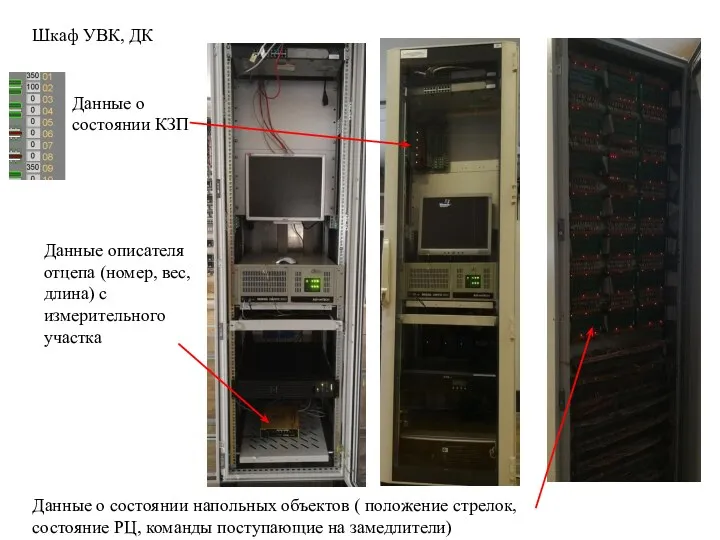
Данные описателя отцепа (номер, вес, длина) с измерительного участка
Шкаф УВК, ДК
Данные
Данные описателя отцепа (номер, вес, длина) с измерительного участка
Шкаф УВК, ДК
Данные
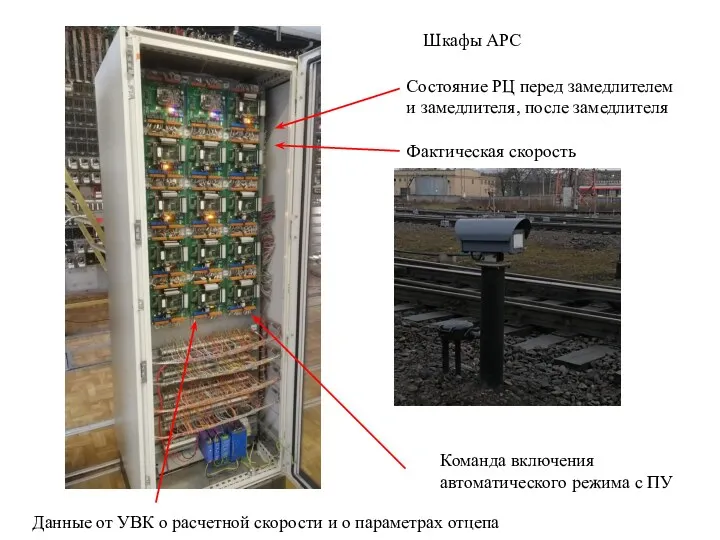
Шкафы АРС
Состояние РЦ перед замедлителем и замедлителя, после замедлителя
Фактическая скорость
Команда включения
Шкафы АРС
Состояние РЦ перед замедлителем и замедлителя, после замедлителя
Фактическая скорость
Команда включения
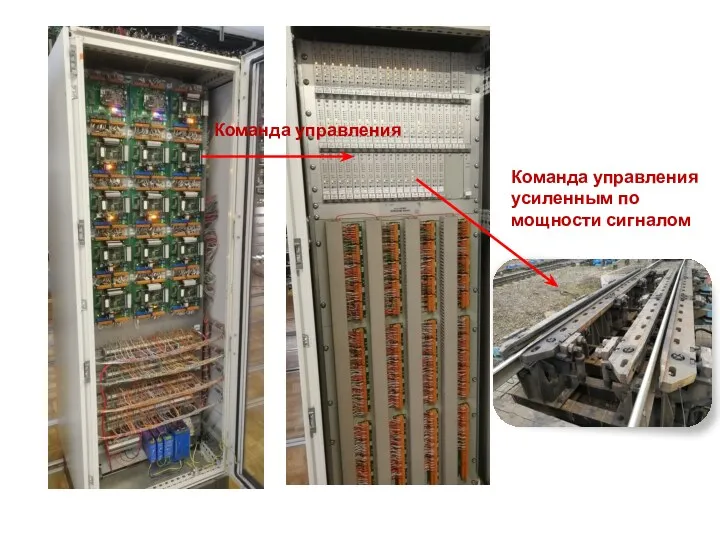
Команда управления
Команда управления усиленным по мощности сигналом
Команда управления
Команда управления усиленным по мощности сигналом

Плата МК-АРС
Светодиод «Автоматика»
Микрореле
(команды управления)
Flash память
(алгоритмы торможения)
Контроллер платы
«TERN»
Настроечные переключатели
(настройка на место
Плата МК-АРС
Светодиод «Автоматика»
Микрореле
(команды управления)
Flash память
(алгоритмы торможения)
Контроллер платы
«TERN»
Настроечные переключатели
(настройка на место
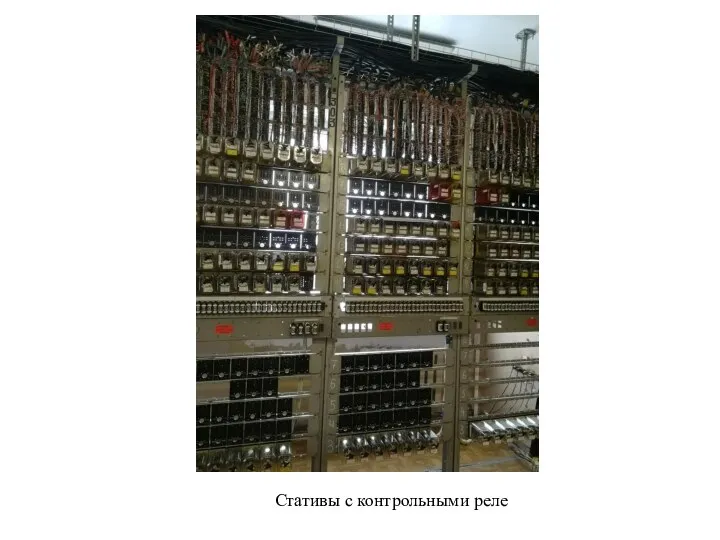
Стативы с контрольными реле
Стативы с контрольными реле
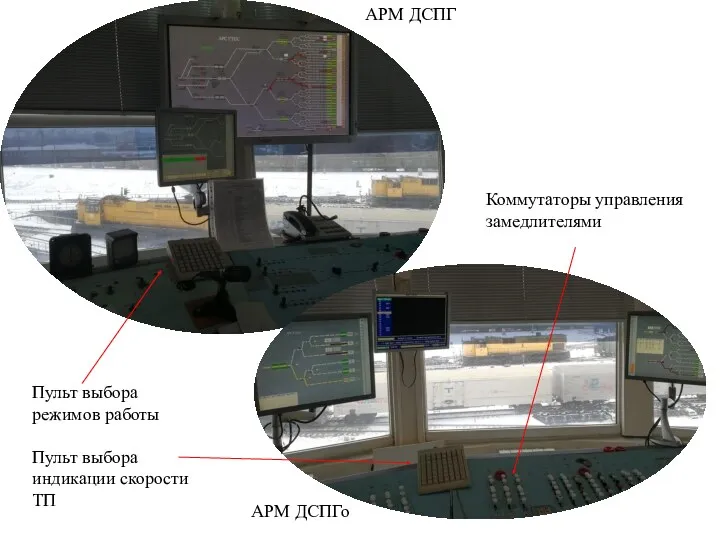
АРМ ДСПГ
АРМ ДСПГо
Коммутаторы управления замедлителями
Пульт выбора режимов работы
Пульт выбора индикации скорости
АРМ ДСПГ
АРМ ДСПГо
Коммутаторы управления замедлителями
Пульт выбора режимов работы
Пульт выбора индикации скорости

На мониторах выводится информация:
Маршрут, вес, длина отцепа
Расчетная и фактическая скорости
Режим работы
На мониторах выводится информация:
Маршрут, вес, длина отцепа
Расчетная и фактическая скорости
Режим работы
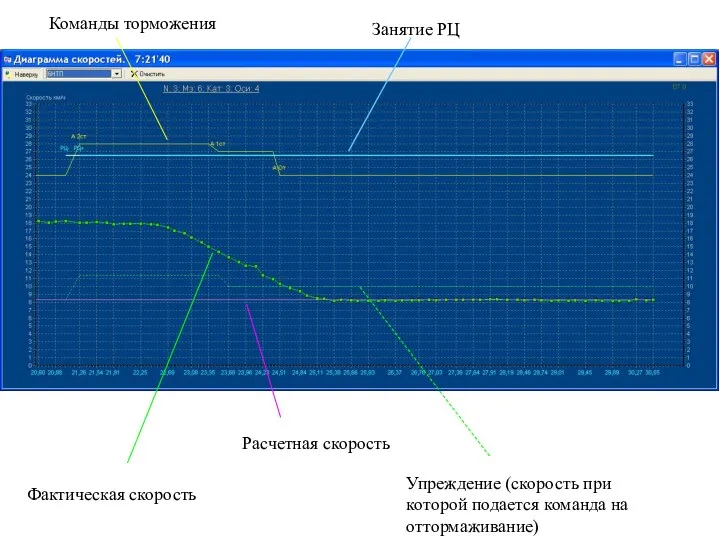
Фактическая скорость
Расчетная скорость
Упреждение (скорость при которой подается команда на оттормаживание)
Занятие РЦ
Команды
Фактическая скорость
Расчетная скорость
Упреждение (скорость при которой подается команда на оттормаживание)
Занятие РЦ
Команды
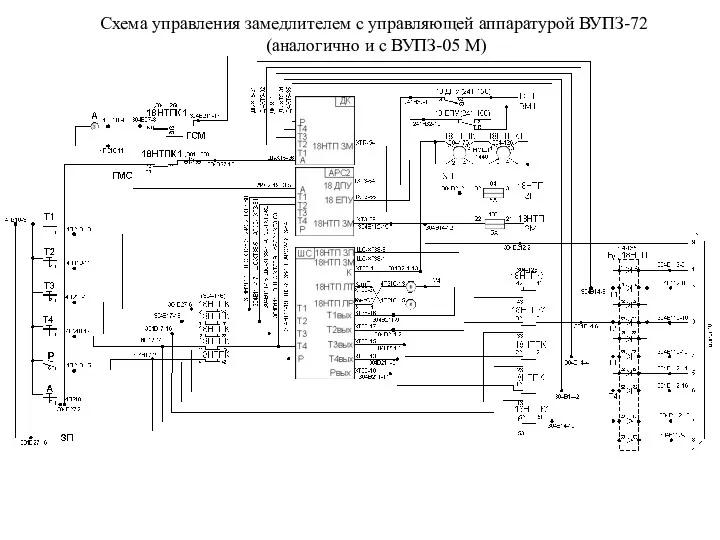
Схема управления замедлителем с управляющей аппаратурой ВУПЗ-72
(аналогично и с ВУПЗ-05
Схема управления замедлителем с управляющей аппаратурой ВУПЗ-72
(аналогично и с ВУПЗ-05
РДК-77
РДК-77
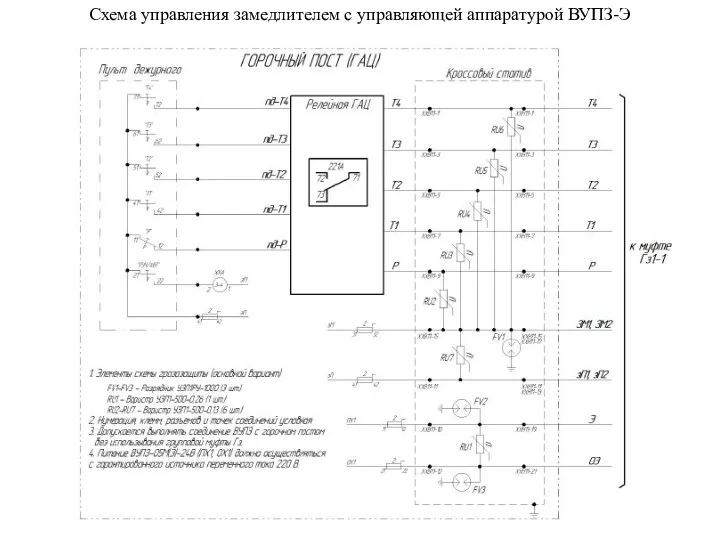
Схема управления замедлителем с управляющей аппаратурой ВУПЗ-Э
Схема управления замедлителем с управляющей аппаратурой ВУПЗ-Э
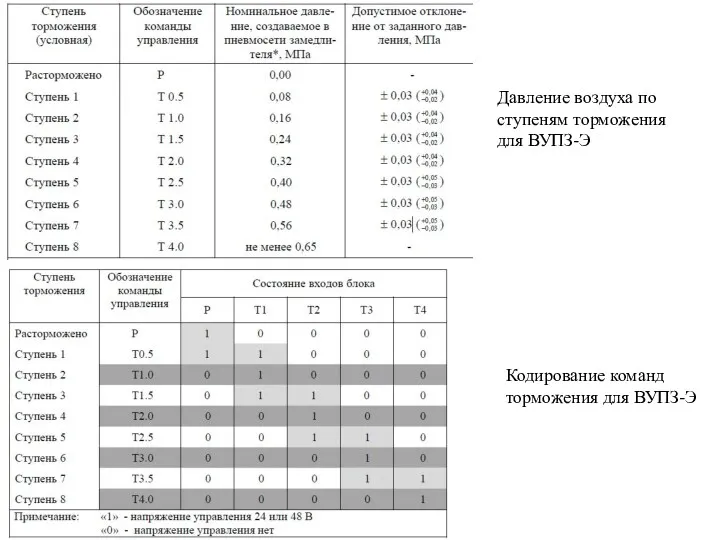
Давление воздуха по ступеням торможения для ВУПЗ-Э
Кодирование команд торможения для ВУПЗ-Э
Давление воздуха по ступеням торможения для ВУПЗ-Э
Кодирование команд торможения для ВУПЗ-Э
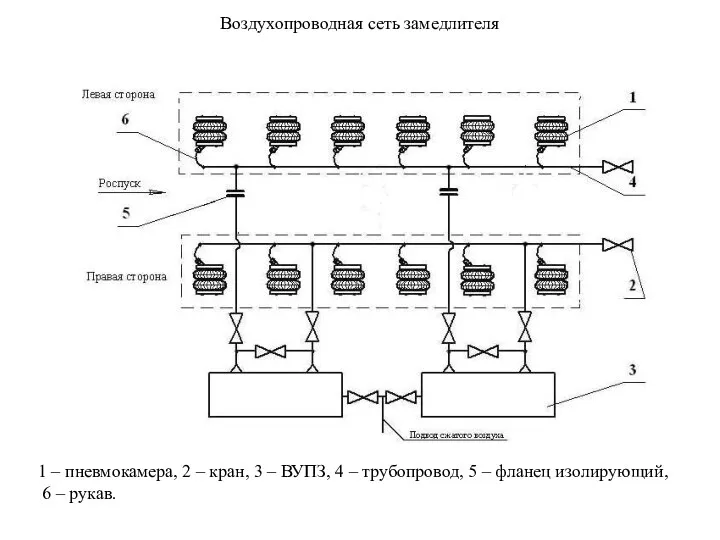
Воздухопроводная сеть замедлителя
1 – пневмокамера, 2 – кран, 3 – ВУПЗ,
Воздухопроводная сеть замедлителя
1 – пневмокамера, 2 – кран, 3 – ВУПЗ,
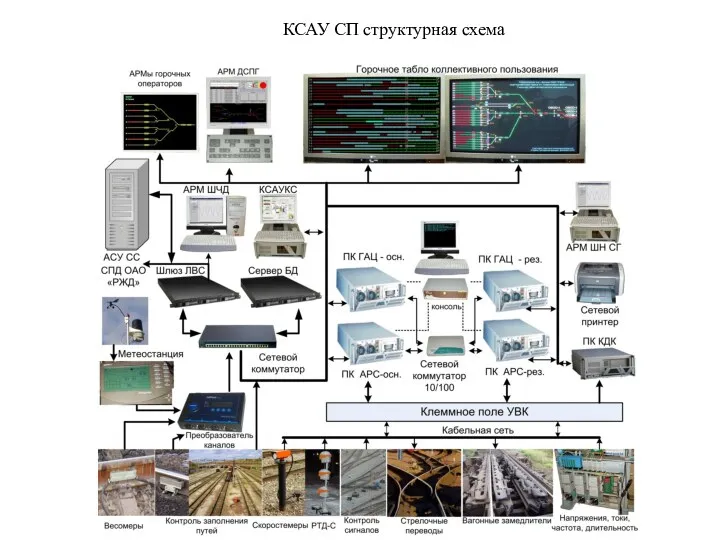
КСАУ СП структурная схема
КСАУ СП структурная схема
Подсистема АРС, решая задачи интервального (на 1ТП), интервально-прицельного (на 2 ТП)
Подсистема АРС, решая задачи интервального (на 1ТП), интервально-прицельного (на 2 ТП)
 Презентация Индустриальный пейзаж
Презентация Индустриальный пейзаж урок по технологии обработки древесины на деревообрабатывающих станках
урок по технологии обработки древесины на деревообрабатывающих станках 3 ноября 1918 года - выступление военных моряков в городе Киле
3 ноября 1918 года - выступление военных моряков в городе Киле Пасха 2019. Православная книга
Пасха 2019. Православная книга Презентация к классному часу Огонь - наш друг или враг...
Презентация к классному часу Огонь - наш друг или враг... Силикатозы. Основные клинические синдромы. Принципы терапии
Силикатозы. Основные клинические синдромы. Принципы терапии Русские народные волшебные сказки. 1 часть
Русские народные волшебные сказки. 1 часть What is autumn
What is autumn Древнегреческая лирика
Древнегреческая лирика 8 марта Диск
8 марта Диск Система и методы трудового права
Система и методы трудового права Орнамент в полосе (урок технологии, 1 класс)
Орнамент в полосе (урок технологии, 1 класс) Конкурс публикаций Математика и физика здоровья для обучающихся АГПУ
Конкурс публикаций Математика и физика здоровья для обучающихся АГПУ Приложение к уроку русского языка в 3 классе
Приложение к уроку русского языка в 3 классе Субпродукты
Субпродукты Германия. Традиции Германии
Германия. Традиции Германии Линзы. Построение в линзах. Формула тонкой линзы
Линзы. Построение в линзах. Формула тонкой линзы Робот-домовой. Проект
Робот-домовой. Проект Расстройства учебных навыков у детей
Расстройства учебных навыков у детей Виды реконструктивных вмешательств на челюстных костях и техника их проведения
Виды реконструктивных вмешательств на челюстных костях и техника их проведения Фотоотчёт по программе Разговор о правильном питании (1 класс)
Фотоотчёт по программе Разговор о правильном питании (1 класс) Классификация неметаллических материалов. Пластмассы
Классификация неметаллических материалов. Пластмассы Планеты земной группы
Планеты земной группы Налоговая политика России
Налоговая политика России Временное пломбирование корневых каналов
Временное пломбирование корневых каналов Инсектная аллергия
Инсектная аллергия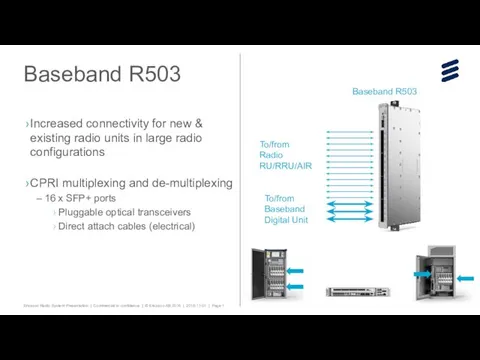 Baseband R503
Baseband R503 Презентация 27
Презентация 27