- Автономные системы навигации летательных аппаратов

Содержание
- 2. ОБЗОРНО-СРАВНИТЕЛЬНЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ (КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНАЯ СИСТЕМА) ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС Обзорно-сравнительные системы (ОСС) предназначены
- 3. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
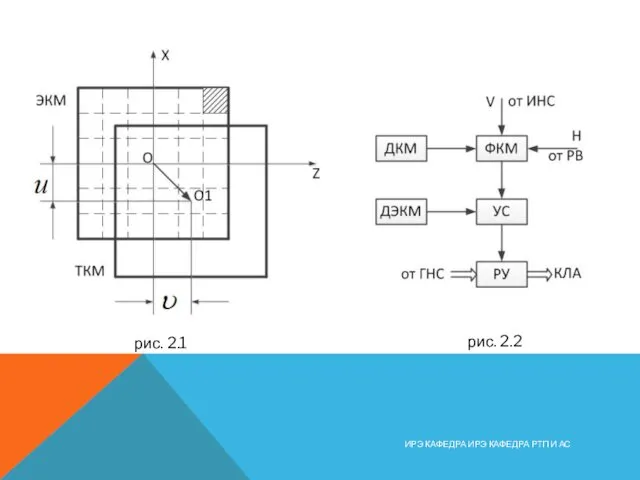
- 4. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС рис. 2.1 рис. 2.2
- 5. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС Обобщенная структурная схема ОСС приведена на рис. 2.2. Датчик
- 6. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС Обычно устройство сравнения карт местности представляет собой коррелятор, который
- 7. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС Цифровые ЭКМ – матрица из ячеек, содержащих кодированную информацию
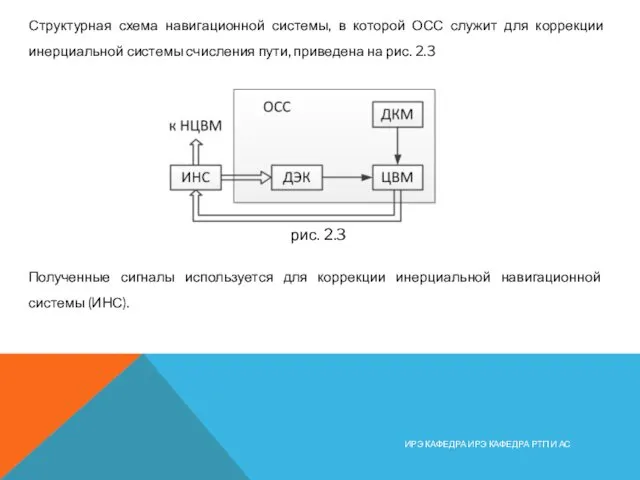
- 8. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС Структурная схема навигационной системы, в которой ОСС служит для
- 9. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС В зависимости от вида получаемой в системе текущей карты
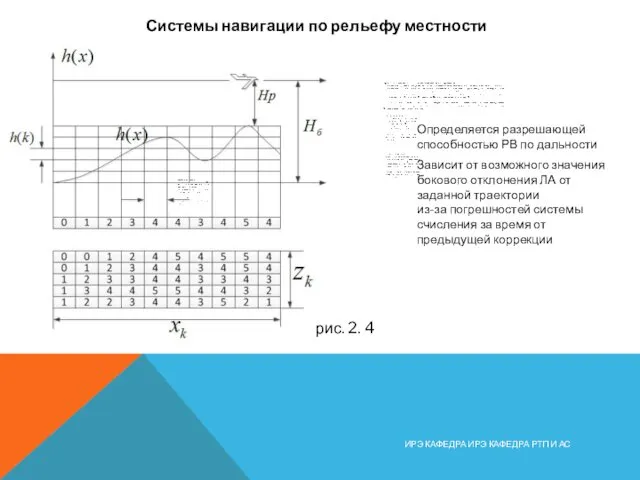
- 10. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС Системы навигации по рельефу местности Определяется разрешающей способностью РВ
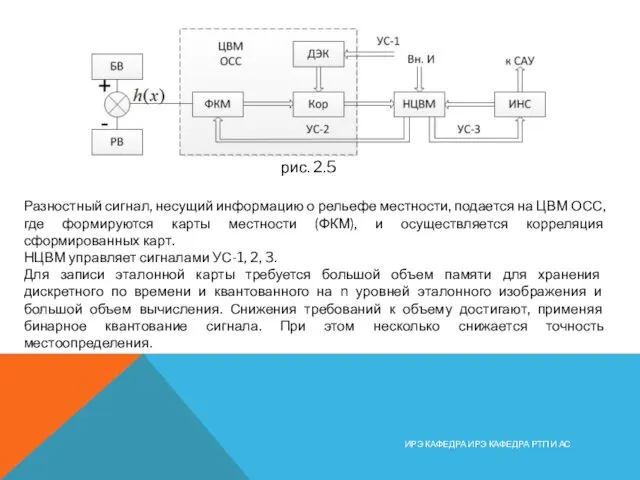
- 11. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС рис. 2.5 Разностный сигнал, несущий информацию о рельефе местности,
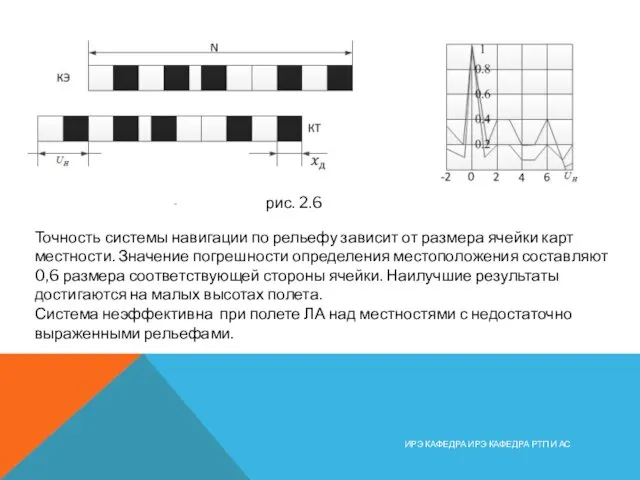
- 12. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС Точность системы навигации по рельефу зависит от размера ячейки
- 13. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС Системы навигации по картам местности Системы, в которых в
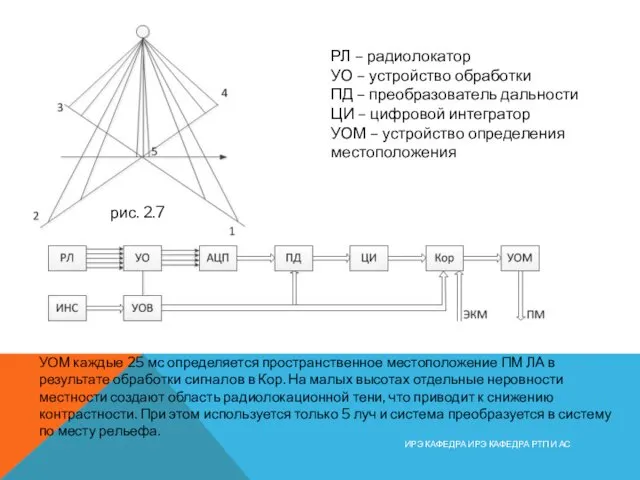
- 14. ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС рис. 2.7 РЛ – радиолокатор УО – устройство обработки
- 16. Скачать презентацию
ОБЗОРНО-СРАВНИТЕЛЬНЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
(КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНАЯ СИСТЕМА)
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Обзорно-сравнительные
ОБЗОРНО-СРАВНИТЕЛЬНЫЕ РАДИОНАВИГАЦИОННЫЕ СИСТЕМЫ
(КОРРЕЛЯЦИОННО-ЭКСТРЕМАЛЬНАЯ СИСТЕМА)
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Обзорно-сравнительные
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
рис. 2.1
рис. 2.2
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
рис. 2.1
рис. 2.2
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Обобщенная структурная схема ОСС приведена
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Обобщенная структурная схема ОСС приведена
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Обычно устройство сравнения карт местности
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Обычно устройство сравнения карт местности
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Цифровые ЭКМ – матрица из
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Цифровые ЭКМ – матрица из
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Структурная схема навигационной системы, в
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Структурная схема навигационной системы, в
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
В зависимости от вида получаемой
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
В зависимости от вида получаемой
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Системы навигации по рельефу местности
Определяется
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Системы навигации по рельефу местности
Определяется
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
рис. 2.5
Разностный сигнал, несущий информацию
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
рис. 2.5
Разностный сигнал, несущий информацию
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Точность системы навигации по рельефу
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Точность системы навигации по рельефу
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Системы навигации по картам местности
Системы,
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
Системы навигации по картам местности
Системы,
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
рис. 2.7
РЛ – радиолокатор
УО –
ИРЭ КАФЕДРА ИРЭ КАФЕДРА РТП И АС
рис. 2.7
РЛ – радиолокатор
УО –
 Небесный металл
Небесный металл Корпоративные финансы. Экономическое содержание и назначение корпоративных финансов
Корпоративные финансы. Экономическое содержание и назначение корпоративных финансов ДЕТИ ВОЙНЫ (презентация)
ДЕТИ ВОЙНЫ (презентация)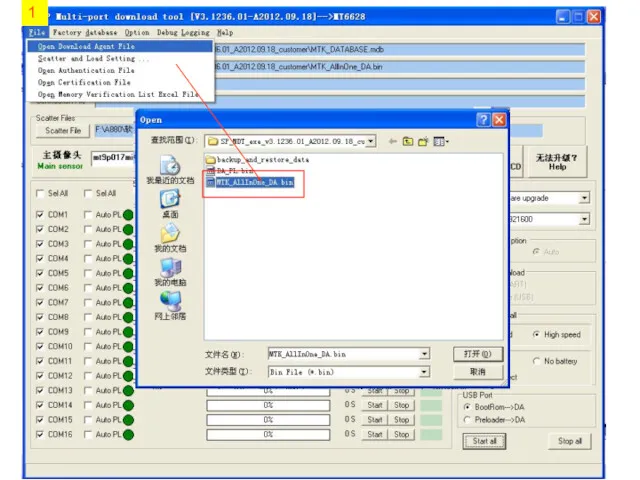 SP MDT MANUAL
SP MDT MANUAL Интерактивная тематическая игра Что такое толерантность? (Поле чудес)
Интерактивная тематическая игра Что такое толерантность? (Поле чудес) Лабиринты 5-6 классы
Лабиринты 5-6 классы Водопровідні мережі. Режими водоспоживання. Витрати та напори в протипожежних водопроводах
Водопровідні мережі. Режими водоспоживання. Витрати та напори в протипожежних водопроводах Песенка про Китай
Песенка про Китай Ангелы
Ангелы Анализ программ нового поколения для подготовки детей к школе
Анализ программ нового поколения для подготовки детей к школе Один день из жизни учителя
Один день из жизни учителя Вредные привычки и их влияние на здоровье подростков
Вредные привычки и их влияние на здоровье подростков Викторина для детей от 6 – 7 лет
Викторина для детей от 6 – 7 лет Урал. Путешествие по России
Урал. Путешествие по России Карбонильные соединения и карбоновые кислоты. Лекция № 4
Карбонильные соединения и карбоновые кислоты. Лекция № 4 Звуковой и слоговой анализ при автоматизации звука Ль
Звуковой и слоговой анализ при автоматизации звука Ль Духовно-нравственное воспитание
Духовно-нравственное воспитание Урок мира и добра ( классный час )
Урок мира и добра ( классный час ) Автокөліктерді диагностикалау
Автокөліктерді диагностикалау Образы русской природы. С.Я. Маршак Гроза днём, В лесу над росистой поляной
Образы русской природы. С.Я. Маршак Гроза днём, В лесу над росистой поляной Моделирование алгоритмов вейвлет-преобразования. Вейвлет-фильтры и их характеристики
Моделирование алгоритмов вейвлет-преобразования. Вейвлет-фильтры и их характеристики Наряд для семейного обеда. (Технология, 6 класс)
Наряд для семейного обеда. (Технология, 6 класс) My idol - hockey club AK BARS
My idol - hockey club AK BARS Транспорт и его виды
Транспорт и его виды Приложение 1 к постановлению Правительства Республики Казахстан
Приложение 1 к постановлению Правительства Республики Казахстан Физиологическая желтуха новорожденных
Физиологическая желтуха новорожденных Интегрированное занятие: Как называют Деда Мороза в разных странах мира? Вторая младшая группа. Воспитатель: Котюжанская Ольга Игоревна.
Интегрированное занятие: Как называют Деда Мороза в разных странах мира? Вторая младшая группа. Воспитатель: Котюжанская Ольга Игоревна. Принципы этиопатогенетической терапии фарингитов
Принципы этиопатогенетической терапии фарингитов