- Безопасный локомотивный объединенный комплекс. Устройство и принцип действия ячеек

Содержание
- 2. СИСТЕМНЫЙ ШКАФ Установлен в шкафу приборов безопасности. В системном блоке размещаются: Устройства технологической радиосвязи, Ячейки управления
- 3. чертежи СШ 36905-100-00-01 СБ Вид спереди Вид сверху Вид снизу ИП-ЛЭ Ячейки КЛУБ-У, САУТ, ТСКБМ Устройства
- 4. Системный шкаф на 2ЭС6 с №114 Ф1 – фильтр электромагнитной защиты по входным сигналам; Вывод –
- 5. Системный шкаф ИП-ЛЭ МПД (GSM) СМПД (ТЕТРА) Диплексер ДФ Вывод КПДС Ф1 ВДС УК УК СБ
- 6. МСУЛ
- 8. Измеритель параметров движения Измеритель параметров движения БЛОК представляет собой три узла, связанных функционально: - блок БС-ДПС/М;
- 9. Измеритель параметров движения ИПД ИПД рассчитан на работу с двумя ДПС-У, имеющими по два выхода. ИПД
- 10. Измеритель параметров движения ИПД является средством измерения и подлежит поверке по методике МП 51473-12 при выпуске
- 11. Измерение пройденного пути БЛОК должен измерять пройденный путь в диапазоне от 0 до 6777215 м с
- 12. Технические характеристики ИПД: БС-ДПС/М Датчики пути и скорости ДПС-У Монитор5
- 13. Ячейка «Ф1» Содержит электромагнитные фильтры защиты по дискретным входным сигналам К линии связи CAN не подключена.
- 14. Ячейка «Вывод». Выходные дискретные сигналы (КОН, клапан 266, «Тяга» (инверсия, «Desiro Rus»)). Подключена к линии связи
- 15. Ячейка «ВДС» На «Desiro Rus» входные дискретные сигналы: кнопка «Тревога» (IN1), Ключ ЭПК (IN2), «Ноль контроллера»
- 16. Ячейка «КПДС» Ключи подключения дискретных сигналов (аналог ячейки КП в КЛУБ-У, только без модуля питания). К
- 17. Ячейки ЦО, СБ, усилители ЭПК Ячейки ЦО подключены к линии связи CAN. УК – усилители ЭПК
- 18. Входные сигналы модуля ЦО ТСКБМ, ВС-САУТ, Состояние РБ, РБС, РБП, Сигнал светофора, Включение / выключение тяги;
- 19. Ячейки ЦО, СБ, усилители ЭПК Ячейки ЦО, СБ, УК первого и второго комплектов работают аналогично одноимённым
- 20. Ячейка «СНС-ЭК» Содержит модуль спутниковой навигационной системы и две микросхемы флэш-памяти, в которых записывается электронная карта.
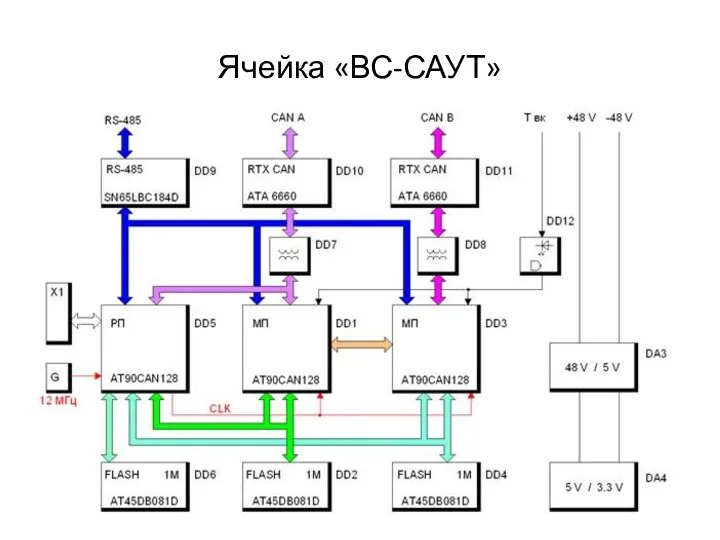
- 21. Ячейка «ВС-САУТ» Назначение: вычисляет программную скорость движения двумя независимыми полукомплектами; регистрация параметры движения в энергонезависимой памяти;
- 22. Ячейка «ВС-САУТ»
- 23. Ячейка «ВС-САУТ» DD5 – РПС; DD1 и DD3 – Модули МП; DD6 - FLASH-память РПС; DD2
- 24. Контакты технологического разъёма X1 Ячейки «ВС-САУТ» ПРИМЕЧАНИЕ: Первоначальное программирование модуля РП ведётся внутрисхемным программатором типа AVR
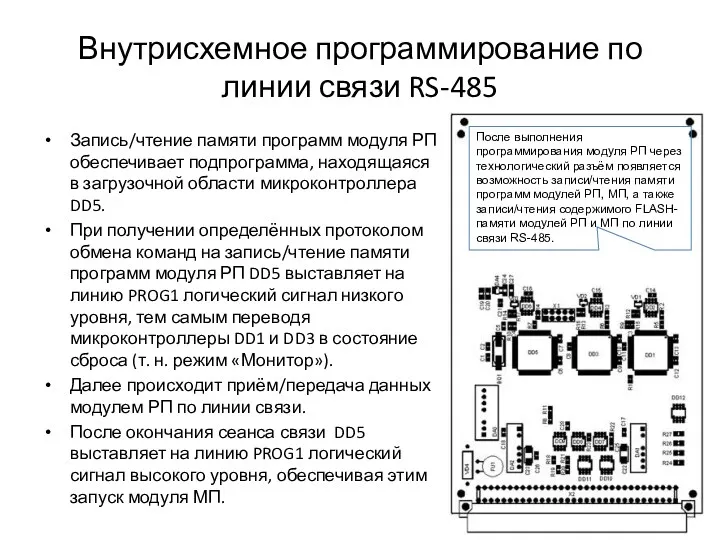
- 25. Внутрисхемное программирование по линии связи RS-485 После выполнения программирования модуля РП через технологический разъём появляется возможность
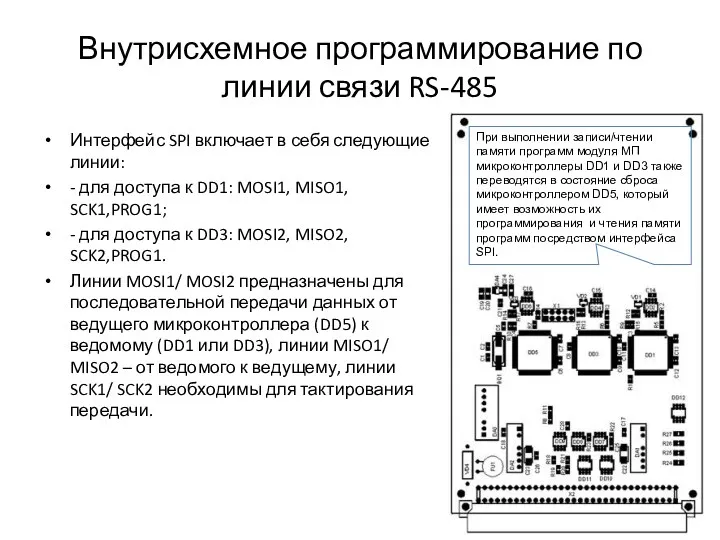
- 26. Внутрисхемное программирование по линии связи RS-485 При выполнении записи/чтении памяти программ модуля МП микроконтроллеры DD1 и
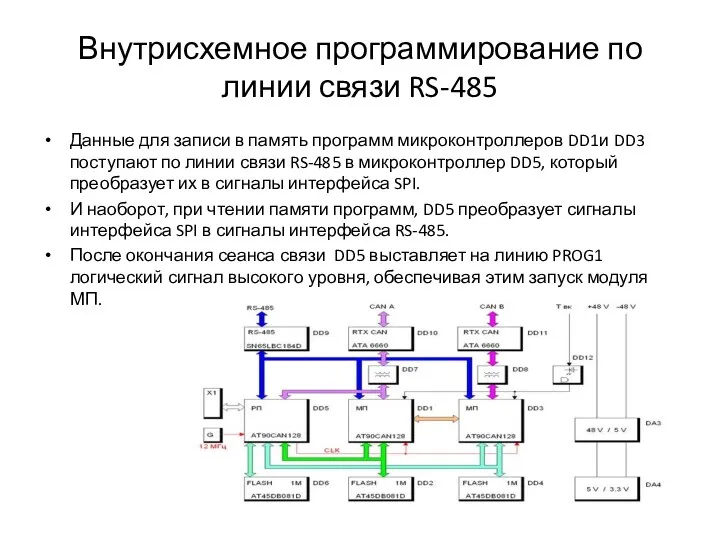
- 27. Внутрисхемное программирование по линии связи RS-485 Данные для записи в память программ микроконтроллеров DD1и DD3 поступают
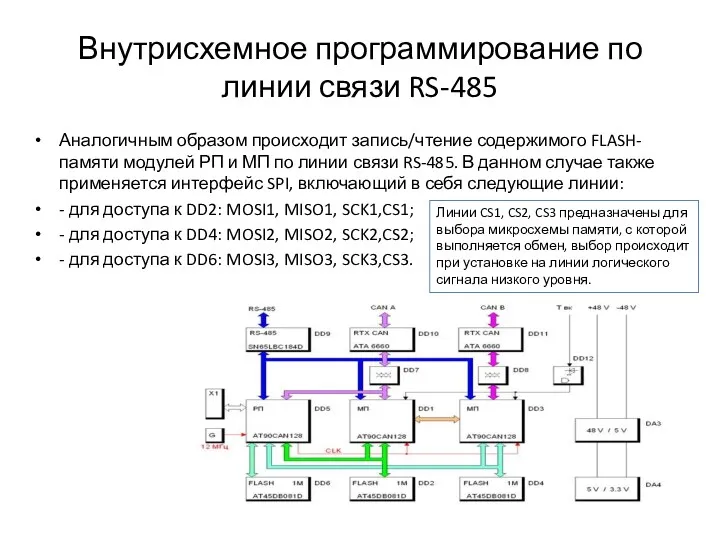
- 28. Внутрисхемное программирование по линии связи RS-485 Аналогичным образом происходит запись/чтение содержимого FLASH-памяти модулей РП и МП
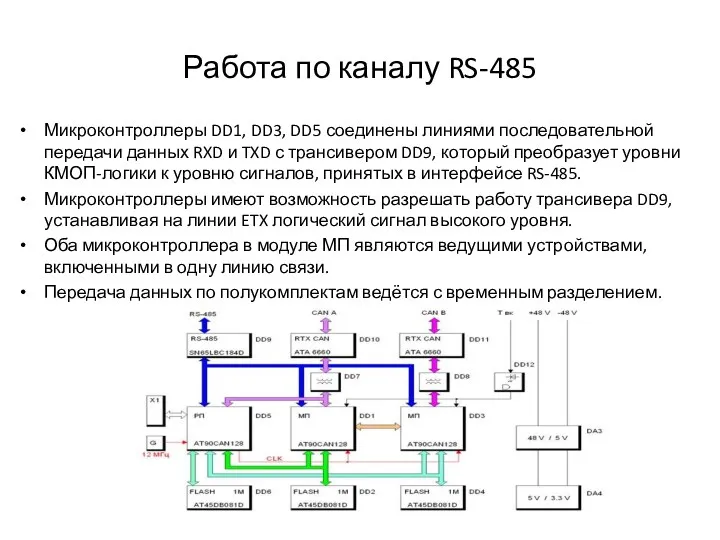
- 29. Работа по каналу RS-485 Микроконтроллеры DD1, DD3, DD5 соединены линиями последовательной передачи данных RXD и TXD
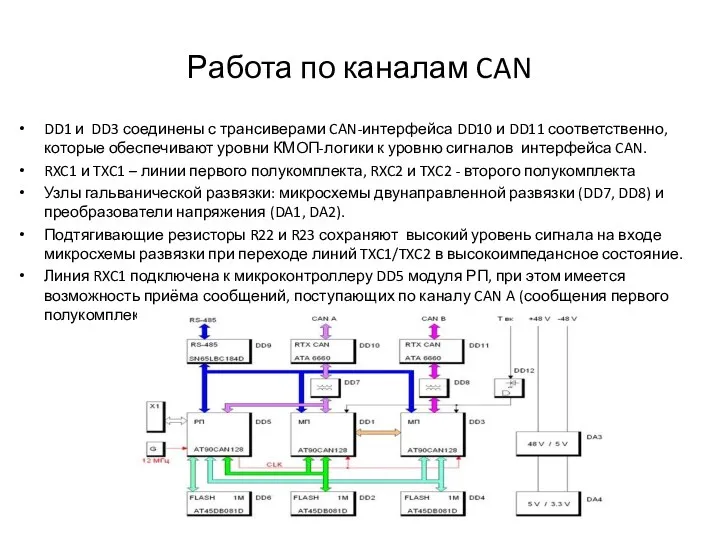
- 30. Работа по каналам CAN DD1 и DD3 соединены с трансиверами CAN-интерфейса DD10 и DD11 соответственно, которые
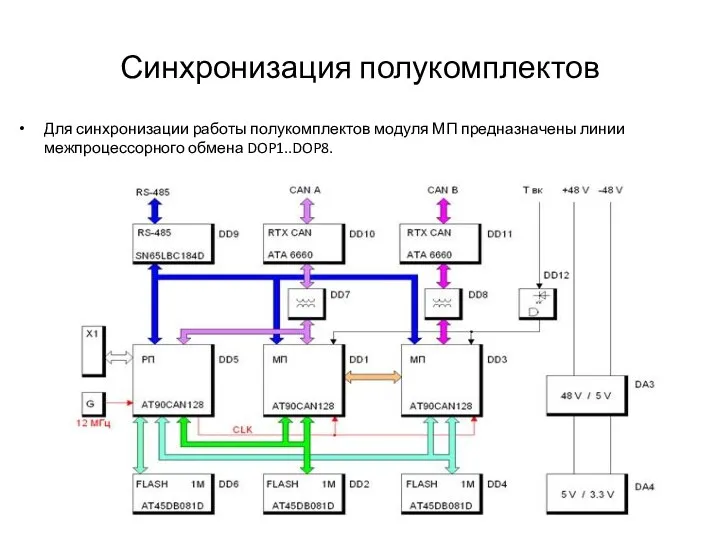
- 31. Синхронизация полукомплектов Для синхронизации работы полукомплектов модуля МП предназначены линии межпроцессорного обмена DOP1..DOP8.
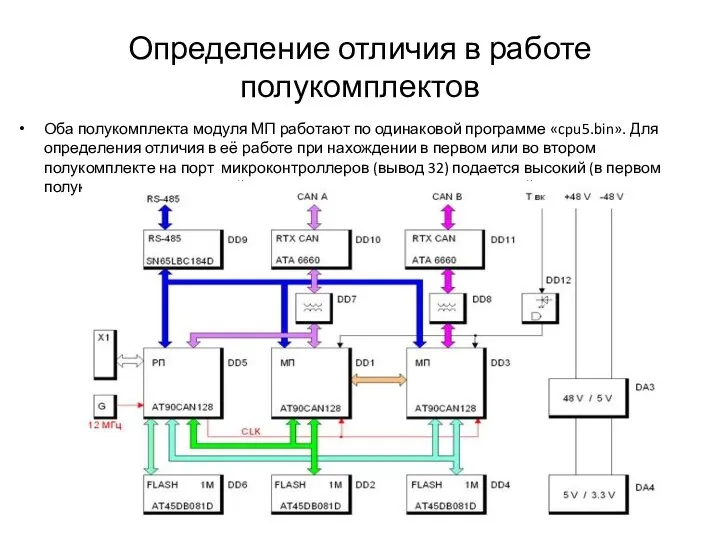
- 32. Определение отличия в работе полукомплектов Оба полукомплекта модуля МП работают по одинаковой программе «cpu5.bin». Для определения
- 33. Техническое обслуживание и текущий ремонт Порядок технического обслуживания Провести визуальное определение состояния соединителей. При загрязнении протереть
- 34. ВС-САУТ выдает в линию CAN сообщения:
- 35. Для справок (1):
- 36. Ячейка «ТСКБМ-К» Контроллер ТСКБМ-К Подключена к линии связи CAN. CAN CAN CAN CAN ЦО ЦО ТСКБМ-К
- 37. Ячейки «ШЛЮЗ» и «Ф2» Ячейка ШЛЮЗ передает сигналы между линиями связи CAN, CANBUS, RS-232 Ячейка Ф2
- 38. Ячейки МПД, СМПД, диплексер Диплексер СВЛ ТР обеспечивает совместную работу ячеек МПД и СМПД (TETRA и
- 39. Ячейки МПД, СМПД, диплексер Модуль Диплексер СВЛ ТР состоит из платы (1), модуля суммирования и разделения
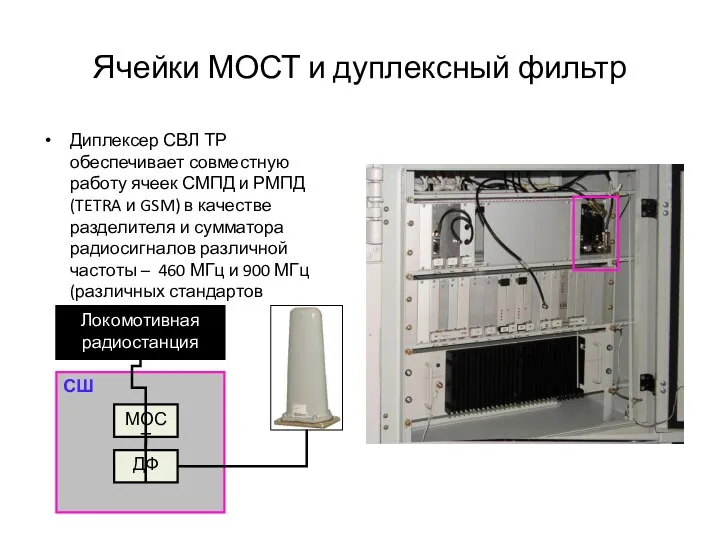
- 40. СШ Ячейки МОСТ и дуплексный фильтр Диплексер СВЛ ТР обеспечивает совместную работу ячеек СМПД и РМПД
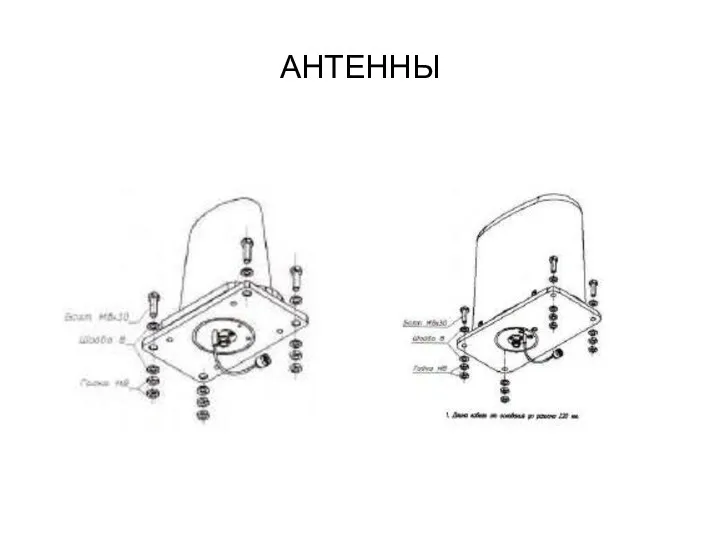
- 41. АНТЕННЫ АЛ1/160 АЛ2/160/Н АЛ2/460/900 АЛ2/460/900/Н АЛ2/160/Н АЛ2/460/900 + +
- 42. АНТЕННЫ
- 43. СШ Антенна АЛ2/460/900/Н Принимает сигналы диапазонов: 460 МГц; 900 МГц (GSM); Сигналы спутниковой навигационной системы. МПД
- 44. Ячейки СШ на электропоезде «Desiro Rus»
- 45. Ячейки СШ на электропоезде «Desiro Rus»/ Ячейки СКРМ, ДФ, ММ1 СКРМ - Обеспечивает адресный двухсторонний обмена
- 46. Ячейки СШ на электропоезде «Desiro Rus»/ Модуль ЦО CAN CAN CAN ЦО ЦО
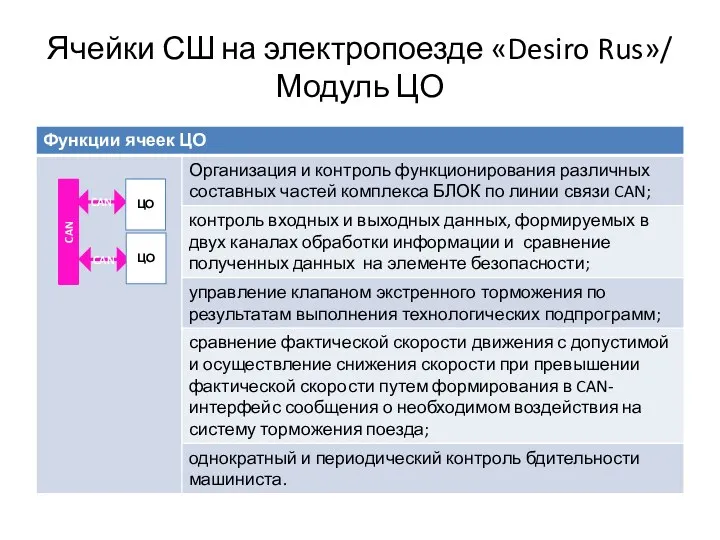
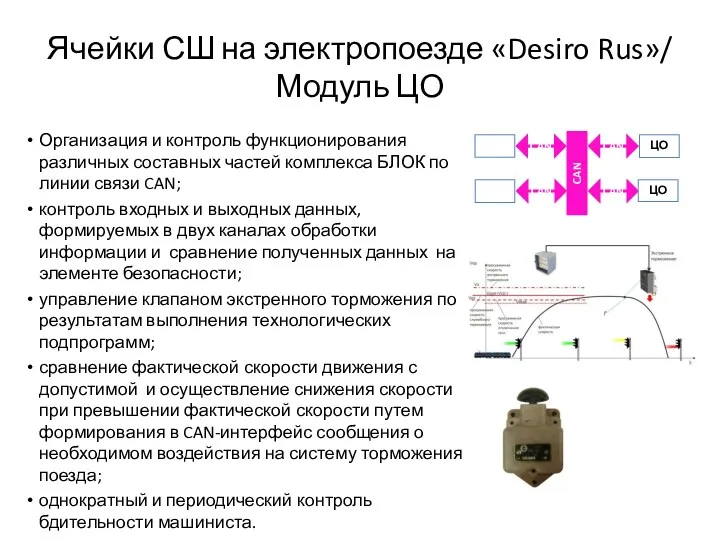
- 47. Ячейки СШ на электропоезде «Desiro Rus»/ Модуль ЦО CAN CAN CAN CAN ЦО Организация и контроль
- 48. Ячейки СШ на электропоезде «Desiro Rus»/ Ячейка ВС-САУТ выдача команд разбор тяги и торможение КОН; обработка
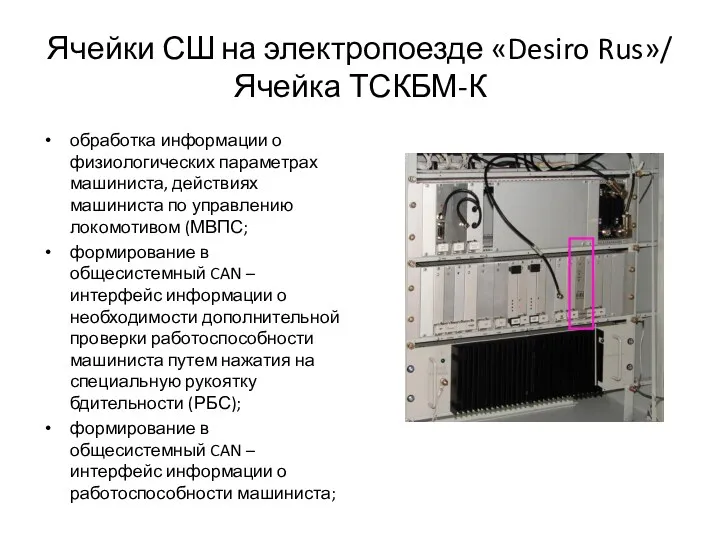
- 49. Ячейки СШ на электропоезде «Desiro Rus»/ Ячейка ТСКБМ-К обработка информации о физиологических параметрах машиниста, действиях машиниста
- 50. Ячейки СШ на электропоезде «Desiro Rus»/ Ячейка ЭК-СНС запись и хранение в энергонезависимой памяти, а так
- 51. Ячейки СШ на электропоезде «Desiro Rus»/ Ячейка ВДС Прием и обработка дискретных сигналов о состоянии аппаратуры
- 52. Ячейки СШ на электропоезде «Desiro Rus»/ Ячейка вывода Формирование управляющих воздействий по командам ячейки ВС-САУТ.
- 53. Ячейки СШ на электропоезде «Desiro Rus»/ Ячейки Ф1 и Ф2 Ф1 - предназначен для защиты входных
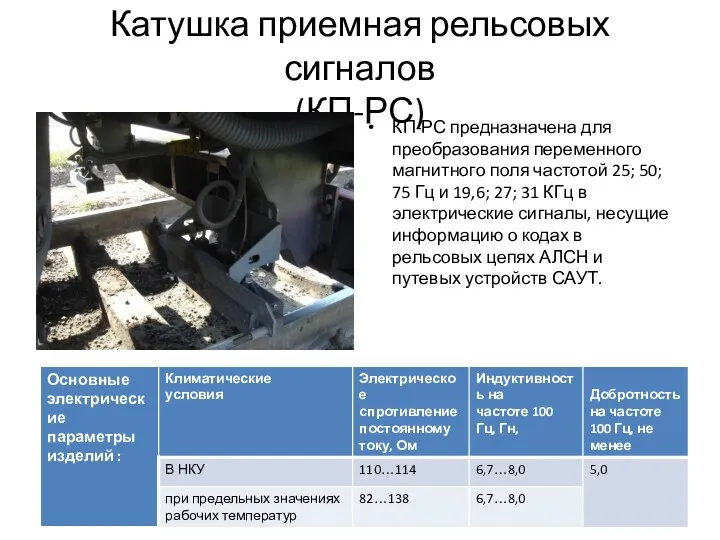
- 54. Катушка приемная рельсовых сигналов (КП-РС) КП-РС предназначена для преобразования переменного магнитного поля частотой 25; 50; 75
- 55. Схема катушки КП-РС
- 56. Схема соединения катушек КП-РС Fалсн: 25Гц, 50Гц, 75Гц, Fалс-ен: 175Гц Fсаут: 19,6 кГц, 27 кГц, 31
- 57. Блок АЛС-ТКС Обрабатывает сигналы диапазонов АЛСН и САУТ, принятые катушками КП-РС и передаёт их в линии
- 58. Кодовые посылки трансмиттеров КПТ-5 и КПТ-7, принимаемые катушками КП-РС КПТ-5 КПТ-7 t = 1,6 с t
- 59. Приём информации правой катушкой КП-РС от путевых устройств САУТ САУТ-Ц Предвходные Входные Маршрутные
- 60. Для передачи информации от путевых устройств на локомотив используется явление электромагнитной индукции. АЛСН, АЛС-ЕН АЛСН, АЛС-ЕН
- 61. Блок АЛС-ТКС Обрабатывает сигналы диапазонов АЛСН и САУТ, принятые катушками КП-РС и передаёт их в линии
- 62. Блок АЛС-ТКС Состоит из следующих частей: Корпус; Плата объединительная; МП-АЛС (усилитель с дешифратором кодов АЛСН); Приемник
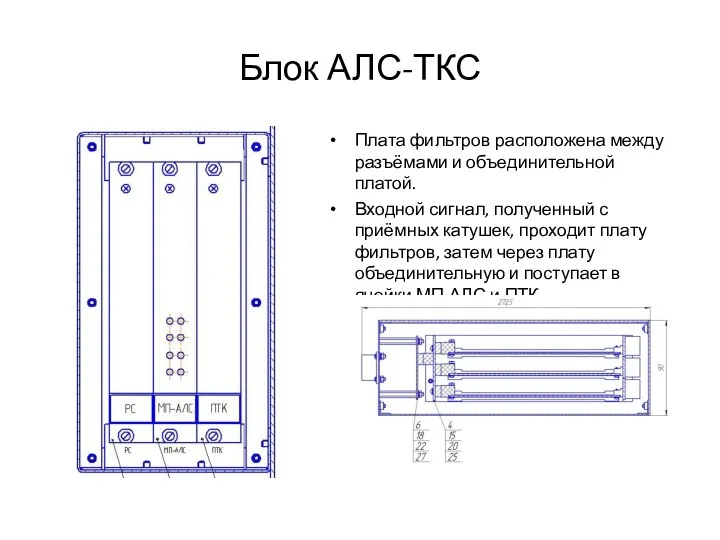
- 63. Блок АЛС-ТКС Плата фильтров расположена между разъёмами и объединительной платой. Входной сигнал, полученный с приёмных катушек,
- 64. Блок АЛС-ТКС Ячейка ПТК: обрабатывает входной сигнал от приёмных катушек и формирует выходные данные. Передача выходных
- 65. Ячейка МП-АЛС выполняет операции: - выбирает приоритет между каналами АЛСН и АЛС-ЕН; - определяет номер кабины,
- 66. Ячейка ПТК выполняет операции: - обеспечивает настройку приемопередающего тракта модуля на требуемую частоту по сообщениям из
- 67. Плата фильтров и плата объединительная Плата фильтров обеспечивает ограничение максимально допустимых напряжений и фильтрацию высокочастотных помех
- 68. Регистратор сигналов АЛС Присутствие РС в блоке АЛС-ТКС необходимо в тех случаях, когда на локомотиве часто
- 69. Датчики угла поворота ДПС-У
- 70. Принцип работы датчика пути и скорости У У Вых 1 Вых 2 Ось КП У Расположение
- 71. Блок связи БС-ДПС/М-БЗС-CAN Обеспечивает измерение: пройденного пути, скорости, ускорения, скольжения колёсных пар; Запоминает сбои и отказы
- 72. В блоке связи БС-ДПС-БЗС/М-CAN размещены: Устройства гальванической развязки, Два микропроцессорных полукомплекта, Приёмопередатчик CAN, Приёмопередатчик RS-485, Блок
- 73. Постоянные характеристики локомотива Команда «К5» *значения диаметров бандажей 3 и 4 колёсных пар берутся из журнала
- 74. БС-ДПС-БЗС/М-CAN Для микропроцессорной системы управления локомотивом (МСУЛ) блок БС-ДПС-БЗС обеспечивает передачу информации от четырех ДПС-У о
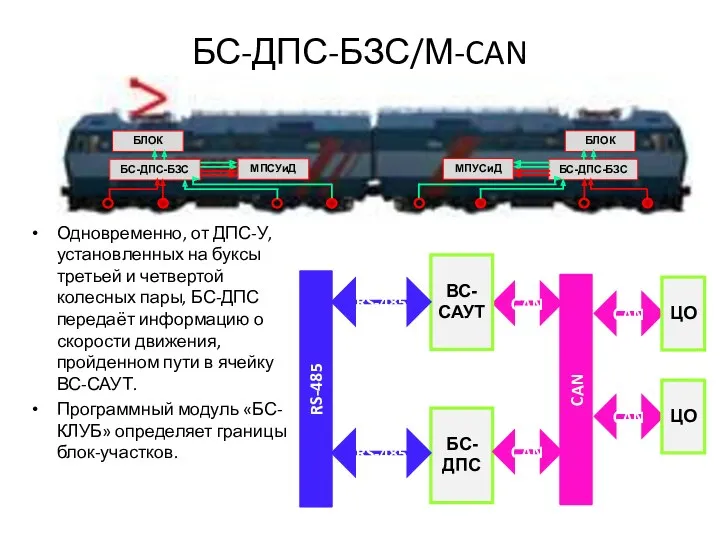
- 75. БС-ДПС-БЗС/М-CAN Одновременно, от ДПС-У, установленных на буксы третьей и четвертой колесных пары, БС-ДПС передаёт информацию о
- 76. БС-ДПС-БЗС/М-CAN БС-ДПС содержат программные модули «ИПД», которые вычисляют скорость и пройденный путь и передают их в
- 77. Защита от одновременного боксования двух колёсных пар На случай одновременного боксования двух колёсных датчиков ведётся контроль
- 78. Устройства гальванической развязки В1…В4: Выполнены на оптопарах MOCD213 (DA1 – для первого потребителя и DA2 –
- 79. Модуль сигналов светофора МСС 36905-350-00 Модуль МСС предназначен для индикации сигналов АЛСН и АЛС-ЕН.
- 80. МСС. Устройство и работа 2 независимых канала для обработки данных поступающих из CAN линии. При поступлении
- 81. МСС. Устройство и работа Для безопасной индикации сигналов АЛСН/АЛС-ЕН, управление группами светодиодов производится одновременно с двух
- 82. МОНИТОР При включении источника питания ИП с выставленным напряжением (48±5) В должна произойти загрузка операционной системы
- 83. Информация, отображаемая на Мониторе:
- 84. После включения ключа ЭПК – на мониторе появляется дополнительная информация: - допустимая скорость; - сигнал «Внимание»
- 85. Расположение индикаторов информации на лицевой панели «Монитор 5»: (1) 1 - № ПУТИ: номер пути на
- 86. Расположение индикаторов информации на лицевой панели «Монитор 5»: (2) 5 - КОЭФ. ТОРМ.: коэффициент торможения. 6
- 87. Расположение индикаторов информации на лицевой панели «Монитор 5»: (3) 8 - РАССТ. ДО ЦЕЛИ: указатель расстояния
- 88. Расположение индикаторов информации на лицевой панели «Монитор 5»: (4) 11 - ВИД ЦЕЛИ: вид ближайшей цели.
- 89. Расположение индикаторов информации на лицевой панели «Монитор 5»: (5) 15 - Шкала давления в тормозном цилиндре
- 90. Расположение индикаторов информации на лицевой панели «Монитор 5»: (6) 19 - Сигнал желтого цвета предварительная световая
- 91. Расположение индикаторов информации на лицевой панели «Монитор 5»: (7) 22 - Указатель поездного режима работы локомотива:
- 92. Расположение индикаторов информации на лицевой панели «Монитор 5»: (8) 24 - Значение целевой скорости в виде
- 93. Информация от ячейки ВС-САУТ на мониторе Расстояние до точки прицельной остановки Запрет отпуска Тормозной коэффициент Vдоп
- 94. Модуль ввода 36905-250-00 (клавиатура) Модуль предназначен для безопасного ввода параметров и опроса рукояток бдительности CAN CAN
- 95. Модуль ввода 36905-250-00 (клавиатура)
- 96. Модуль ввода 36905-250-00 «П» – режим чтения и ввода номера пути; «ВК» – выключение красного сигнала;
- 97. Модуль ввода 36905-250-00. регулировка яркости « » - изменение уровня яркости; Примечания: а) При последовательном нажатии
- 98. Регулировка яркости МСС, МВ Нажать кнопку «☼» на МВ, проконтролировать появление в информационной строке сообщение «Яркость».
- 99. Модуль ввода 36905-250-00. кнопки САУТ «ПОДТЯГ» - разрешение движения поезда со скоростью не более 30 км/ч
- 100. Модуль ввода 36905-250-00. структурная схема 1.5.1 Клавиатура модуля оснащена кнопками с двумя независимыми группами контактов. Обработка
- 101. БИЛ-УМВ
- 102. Рукоятки бдительности РБ, РБС, РБП РБ РБС РБП Рукоятки бдительности подключаются к модулю ввода, который следит
- 103. Функции рукояток бдительности РБ-80
- 104. Блок ПРИС Пульт речевых информационных сообщений содержит синтезатор речи и речевую базу данных, как в ПМ-САУТ
- 105. Блок связи со съёмным носителем БС-СН Блок БС-СН предназначен для запитывания съёмного носителя информации СН, обмена
- 106. Блок регистрации БР-У Регистрирует параметры поездки на кассету КЛУБ-У. CAN БР-У
- 107. Подсистема ТСКБМ Контроллер ТСКБМ – одна из ячеек системного блока. Приемник ТСКБМ соединен с системным блоком
- 108. Сигналы ТСКБМ на мониторе (1) Прием Запрос подтверждения работоспособности Предварительная сигнализация
- 109. Сигналы ТСКБМ на мониторе (2) Прием Предварительная сигнализация Запрос подтверждения работоспособности
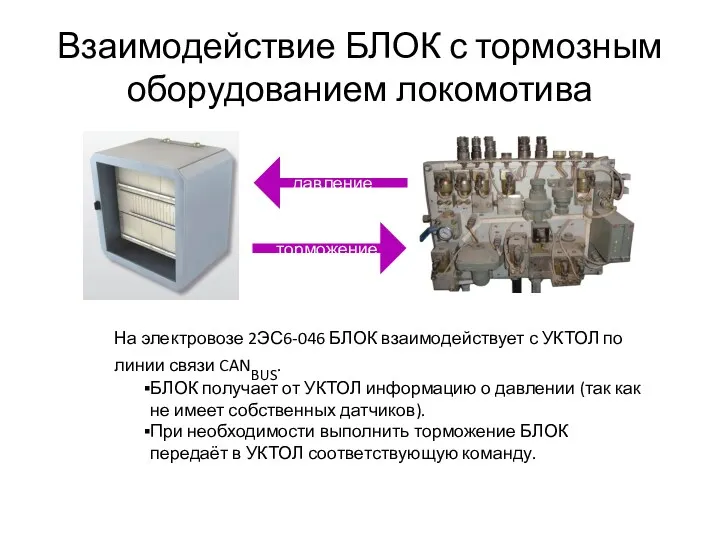
- 110. Взаимодействие БЛОК с тормозным оборудованием локомотива торможение давление На электровозе 2ЭС6-046 БЛОК взаимодействует с УКТОЛ по
- 112. Файлы программ системы БЛОК на электровозы 2ЭС6 и 2ЭС10 *
- 113. Файлы программ системы БЛОК на электровозы 2ЭС6 и 2ЭС10 *
- 114. ПЕРЕЧЕНЬ КОМАНД БЛОК 14.09.11
- 115. Команды «К1», «К4» и их характеристики
- 116. Команда «К5» и её характеристики
- 117. Команды «К6», «К7» и их характеристики
- 118. Команды «К522», «К45», «К46», «К47» и их характеристики
- 119. Команды «К80», «К81», «К82», «К91», «К92» и их характеристики
- 121. Конструктивные отличия БЛОК от систем КЛУБ-У, САУТ-ЦМ/485 и ТСКБМ ПУ-САУТ-ЦМ отсутствует Расшифровку сигналов, поступающих с КП-РС,
- 122. Конструктивные отличия БЛОК от систем КЛУБ-У, САУТ-ЦМ/485 и ТСКБМ ПУ-САУТ-ЦМ отсутствует Для ввода дополнительной информации в
- 124. Скачать презентацию
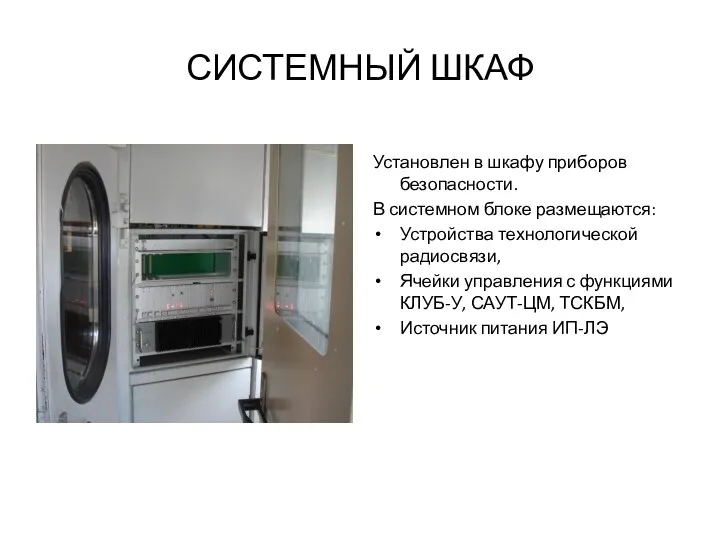
СИСТЕМНЫЙ ШКАФ
Установлен в шкафу приборов безопасности.
В системном блоке размещаются:
Устройства технологической радиосвязи,
Ячейки
СИСТЕМНЫЙ ШКАФ
Установлен в шкафу приборов безопасности.
В системном блоке размещаются:
Устройства технологической радиосвязи,
Ячейки
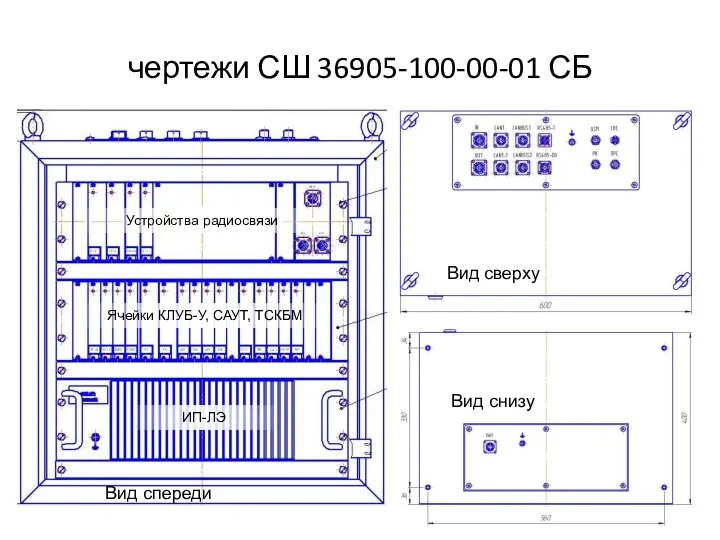
чертежи СШ 36905-100-00-01 СБ
Вид спереди
Вид сверху
Вид снизу
ИП-ЛЭ
Ячейки КЛУБ-У, САУТ, ТСКБМ
Устройства радиосвязи
чертежи СШ 36905-100-00-01 СБ
Вид спереди
Вид сверху
Вид снизу
ИП-ЛЭ
Ячейки КЛУБ-У, САУТ, ТСКБМ
Устройства радиосвязи
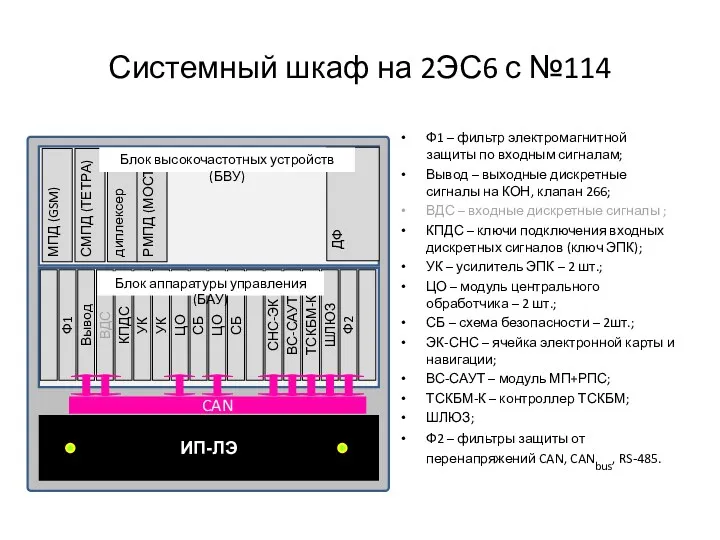
Системный шкаф на 2ЭС6 с №114
Ф1 – фильтр электромагнитной защиты по
Системный шкаф на 2ЭС6 с №114
Ф1 – фильтр электромагнитной защиты по

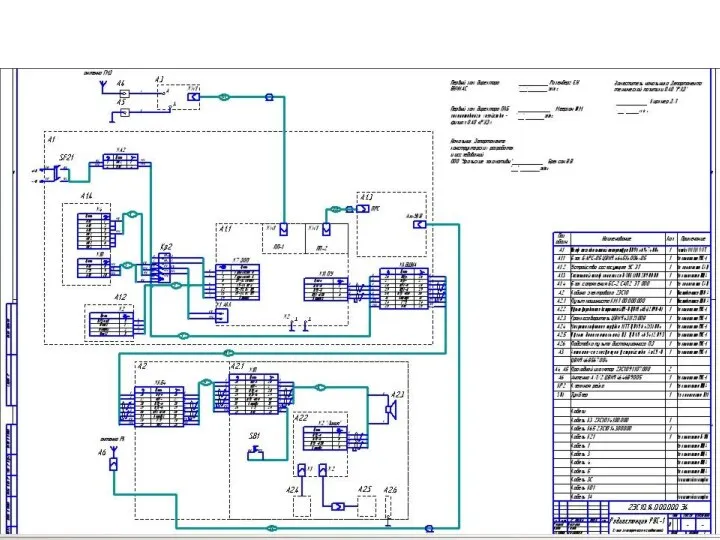
Системный шкаф
ИП-ЛЭ
МПД (GSM)
СМПД (ТЕТРА)
Диплексер
ДФ
Вывод
КПДС
Ф1
ВДС
УК
УК
СБ
СБ
ЦО
ЦО
СНС-ЭК
ТСКБМ-К
ВС-САУТ
ШЛЮЗ
Ф2
CAN BUS
CAN
RS-485
RS-485
RS-232
CAN BUS
RS-232
RS-232
CAN BUS
RS-485
CAN
CAN
РМПД (МОСТ)
Системный шкаф
ИП-ЛЭ
МПД (GSM)
СМПД (ТЕТРА)
Диплексер
ДФ
Вывод
КПДС
Ф1
ВДС
УК
УК
СБ
СБ
ЦО
ЦО
СНС-ЭК
ТСКБМ-К
ВС-САУТ
ШЛЮЗ
Ф2
CAN BUS
CAN
RS-485
RS-485
RS-232
CAN BUS
RS-232
RS-232
CAN BUS
RS-485
CAN
CAN
РМПД (МОСТ)
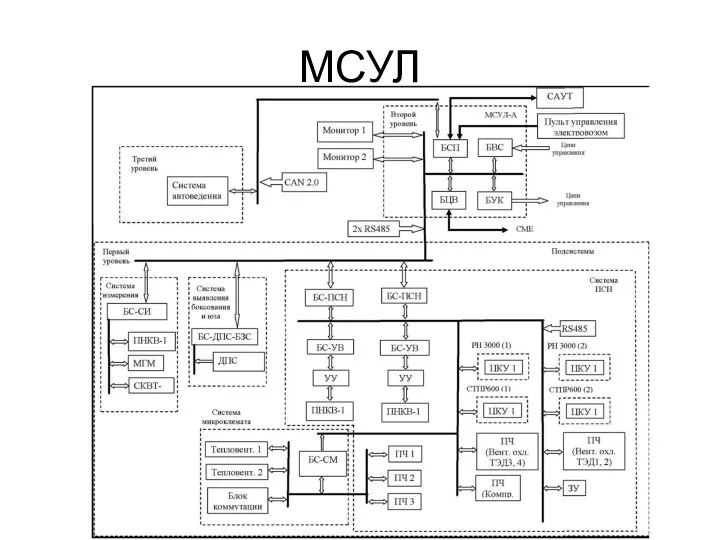
МСУЛ
МСУЛ

Измеритель параметров движения
Измеритель параметров движения БЛОК представляет собой три узла, связанных
Измеритель параметров движения
Измеритель параметров движения БЛОК представляет собой три узла, связанных

Измеритель параметров движения ИПД
ИПД рассчитан на работу с двумя ДПС-У, имеющими
Измеритель параметров движения ИПД
ИПД рассчитан на работу с двумя ДПС-У, имеющими

Измеритель параметров движения
ИПД является средством измерения и подлежит поверке по методике
Измеритель параметров движения
ИПД является средством измерения и подлежит поверке по методике
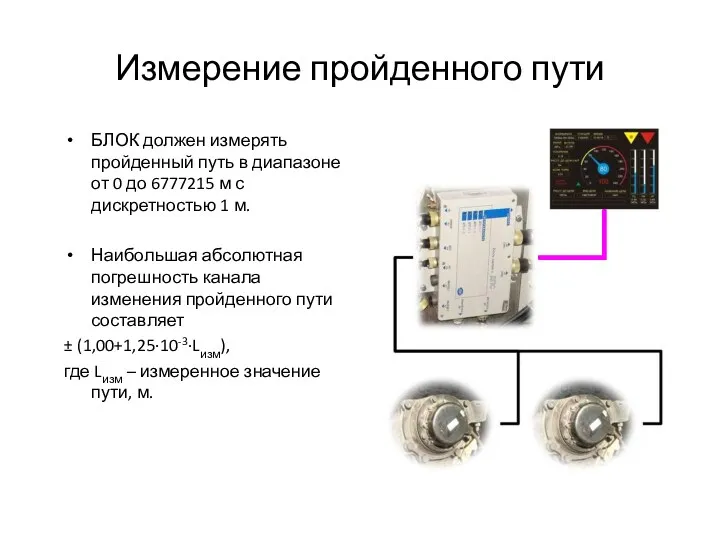
Измерение пройденного пути
БЛОК должен измерять пройденный путь в диапазоне от 0
Измерение пройденного пути
БЛОК должен измерять пройденный путь в диапазоне от 0
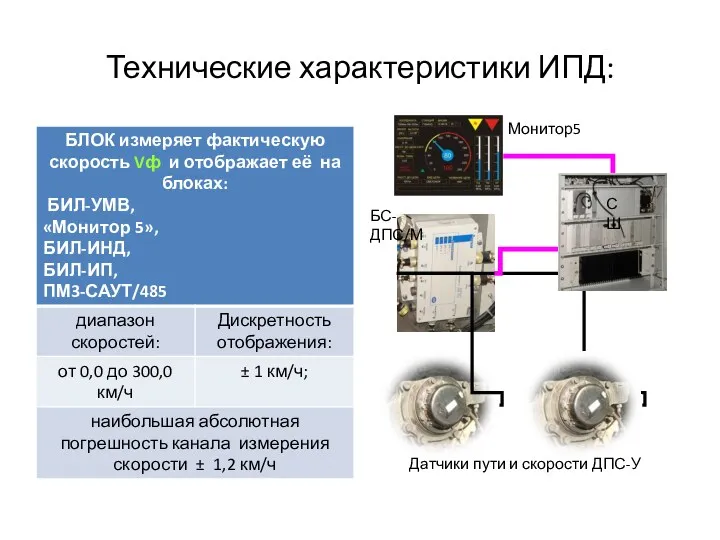
Технические характеристики ИПД:
БС-ДПС/М
Датчики пути и скорости ДПС-У
Монитор5
Технические характеристики ИПД:
БС-ДПС/М
Датчики пути и скорости ДПС-У
Монитор5
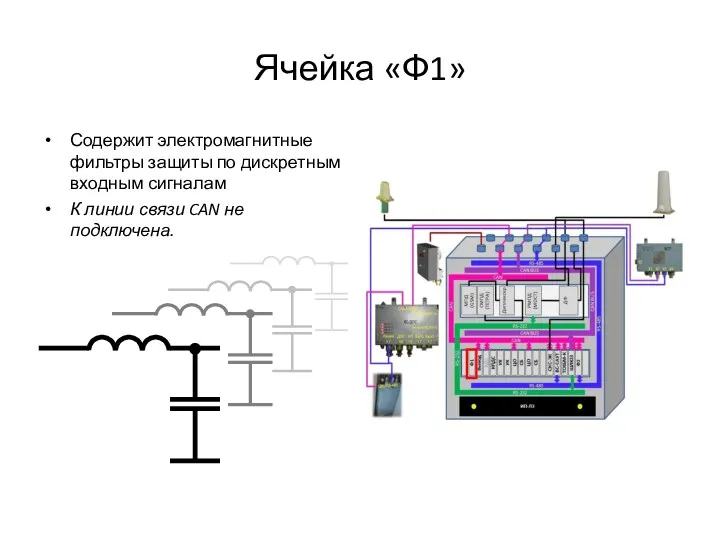
Ячейка «Ф1»
Содержит электромагнитные фильтры защиты по дискретным входным сигналам
К линии связи
Ячейка «Ф1»
Содержит электромагнитные фильтры защиты по дискретным входным сигналам
К линии связи
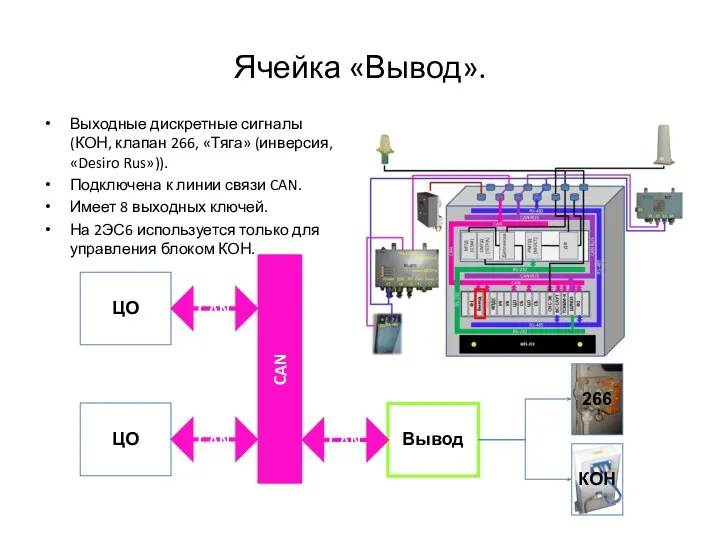
Ячейка «Вывод».
Выходные дискретные сигналы (КОН, клапан 266, «Тяга» (инверсия, «Desiro Rus»)).
Подключена
Ячейка «Вывод».
Выходные дискретные сигналы (КОН, клапан 266, «Тяга» (инверсия, «Desiro Rus»)).
Подключена
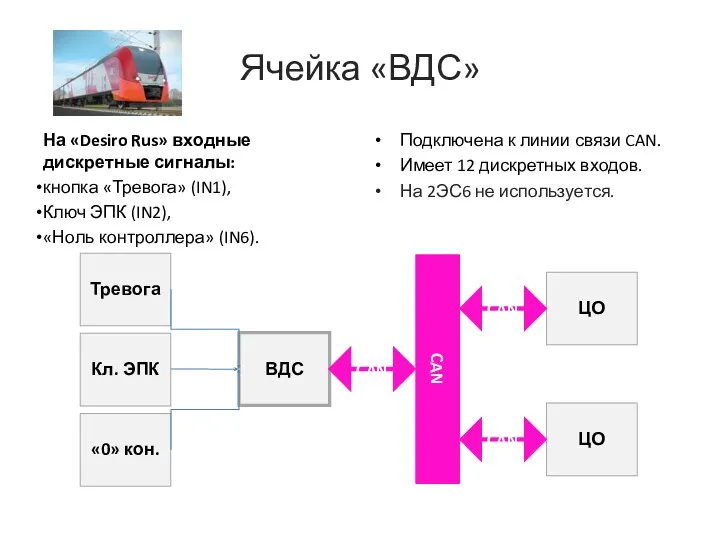
Ячейка «ВДС»
На «Desiro Rus» входные дискретные сигналы:
кнопка «Тревога» (IN1),
Ключ ЭПК (IN2),
«Ноль
Ячейка «ВДС»
На «Desiro Rus» входные дискретные сигналы:
кнопка «Тревога» (IN1),
Ключ ЭПК (IN2),
«Ноль
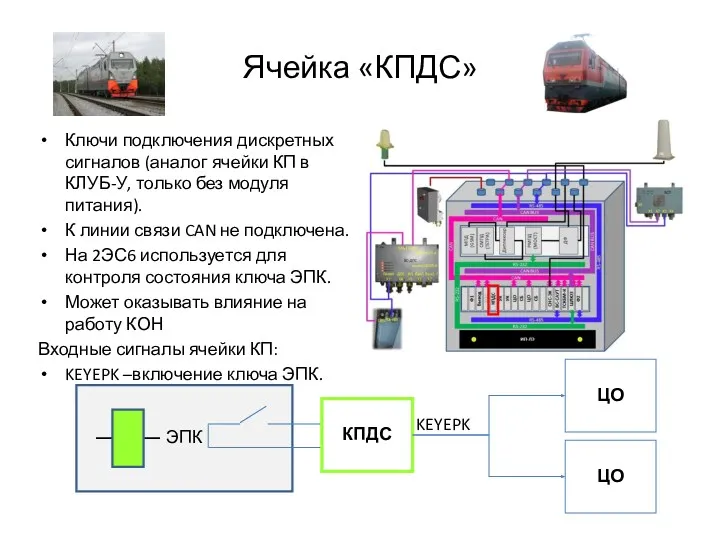
Ячейка «КПДС»
Ключи подключения дискретных сигналов (аналог ячейки КП в КЛУБ-У, только
Ячейка «КПДС»
Ключи подключения дискретных сигналов (аналог ячейки КП в КЛУБ-У, только

Ячейки ЦО, СБ, усилители ЭПК
Ячейки ЦО подключены к линии связи CAN.
УК
Ячейки ЦО, СБ, усилители ЭПК
Ячейки ЦО подключены к линии связи CAN.
УК
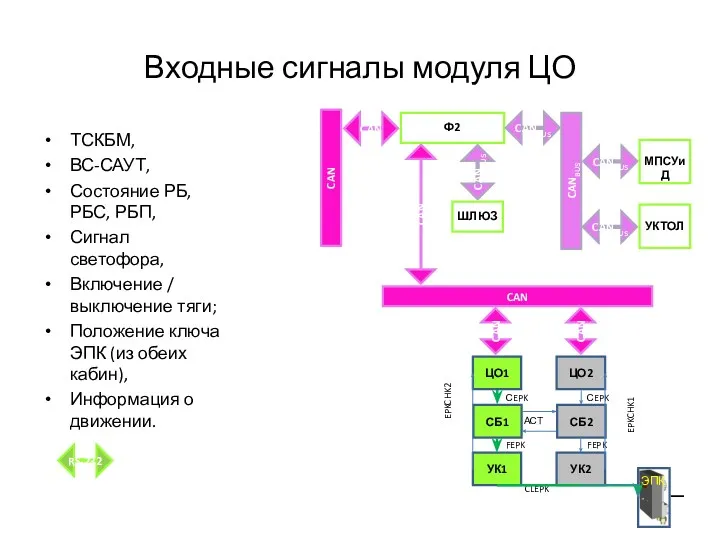
Входные сигналы модуля ЦО
ТСКБМ,
ВС-САУТ,
Состояние РБ, РБС, РБП,
Сигнал светофора,
Включение / выключение
Входные сигналы модуля ЦО
ТСКБМ,
ВС-САУТ,
Состояние РБ, РБС, РБП,
Сигнал светофора,
Включение / выключение
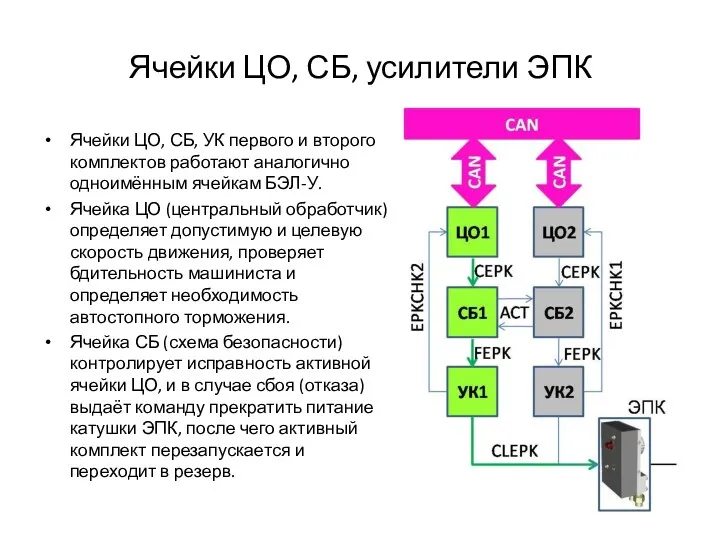
Ячейки ЦО, СБ, усилители ЭПК
Ячейки ЦО, СБ, УК первого и второго
Ячейки ЦО, СБ, усилители ЭПК
Ячейки ЦО, СБ, УК первого и второго
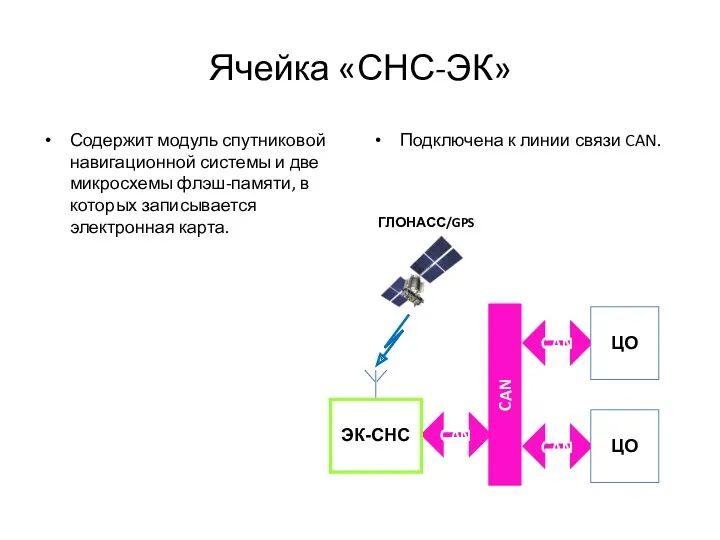
Ячейка «СНС-ЭК»
Содержит модуль спутниковой навигационной системы и две микросхемы флэш-памяти, в
Ячейка «СНС-ЭК»
Содержит модуль спутниковой навигационной системы и две микросхемы флэш-памяти, в

Ячейка «ВС-САУТ»
Назначение:
вычисляет программную скорость движения двумя независимыми полукомплектами;
регистрация параметры движения в
Ячейка «ВС-САУТ»
Назначение:
вычисляет программную скорость движения двумя независимыми полукомплектами;
регистрация параметры движения в
Ячейка «ВС-САУТ»
Ячейка «ВС-САУТ»
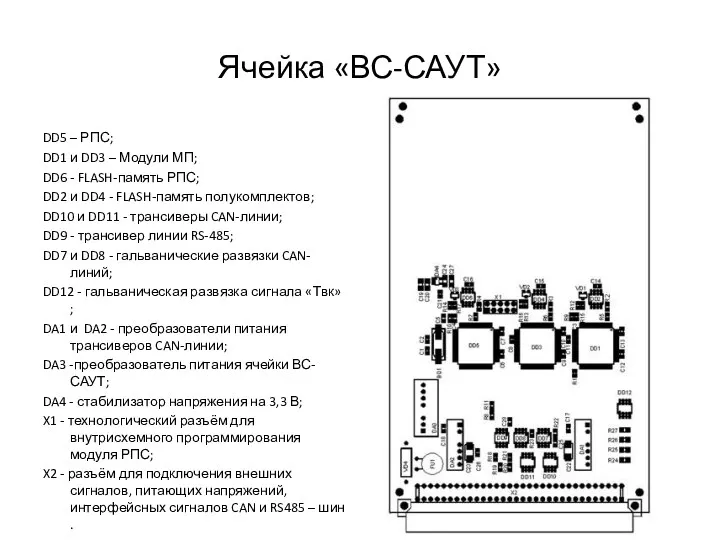
Ячейка «ВС-САУТ»
DD5 – РПС;
DD1 и DD3 – Модули МП;
DD6 - FLASH-память
Ячейка «ВС-САУТ»
DD5 – РПС;
DD1 и DD3 – Модули МП;
DD6 - FLASH-память

Контакты технологического разъёма X1 Ячейки «ВС-САУТ»
ПРИМЕЧАНИЕ:
Первоначальное программирование модуля РП ведётся внутрисхемным
Контакты технологического разъёма X1 Ячейки «ВС-САУТ»
ПРИМЕЧАНИЕ:
Первоначальное программирование модуля РП ведётся внутрисхемным
Внутрисхемное программирование по линии связи RS-485
После выполнения программирования модуля РП через
Внутрисхемное программирование по линии связи RS-485
После выполнения программирования модуля РП через
Внутрисхемное программирование по линии связи RS-485
При выполнении записи/чтении памяти программ модуля
Внутрисхемное программирование по линии связи RS-485
При выполнении записи/чтении памяти программ модуля
Внутрисхемное программирование по линии связи RS-485
Данные для записи в память программ
Внутрисхемное программирование по линии связи RS-485
Данные для записи в память программ
Внутрисхемное программирование по линии связи RS-485
Аналогичным образом происходит запись/чтение содержимого FLASH-памяти
Внутрисхемное программирование по линии связи RS-485
Аналогичным образом происходит запись/чтение содержимого FLASH-памяти
Работа по каналу RS-485
Микроконтроллеры DD1, DD3, DD5 соединены линиями последовательной передачи
Работа по каналу RS-485
Микроконтроллеры DD1, DD3, DD5 соединены линиями последовательной передачи
Работа по каналам CAN
DD1 и DD3 соединены с трансиверами CAN-интерфейса DD10
Работа по каналам CAN
DD1 и DD3 соединены с трансиверами CAN-интерфейса DD10
Синхронизация полукомплектов
Для синхронизации работы полукомплектов модуля МП предназначены линии межпроцессорного обмена
Синхронизация полукомплектов
Для синхронизации работы полукомплектов модуля МП предназначены линии межпроцессорного обмена
Определение отличия в работе полукомплектов
Оба полукомплекта модуля МП работают по одинаковой
Определение отличия в работе полукомплектов
Оба полукомплекта модуля МП работают по одинаковой
Техническое обслуживание и текущий ремонт
Порядок технического обслуживания
Провести визуальное определение состояния соединителей.
Техническое обслуживание и текущий ремонт
Порядок технического обслуживания
Провести визуальное определение состояния соединителей.

ВС-САУТ выдает в линию CAN сообщения:
ВС-САУТ выдает в линию CAN сообщения:
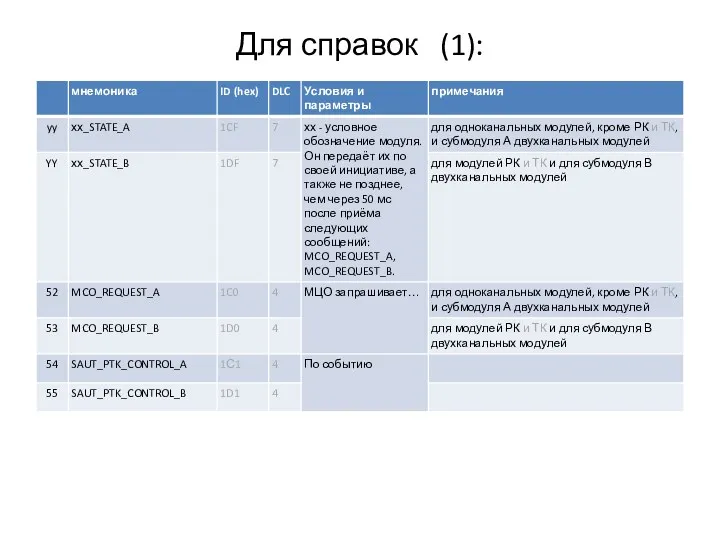
Для справок (1):
Для справок (1):
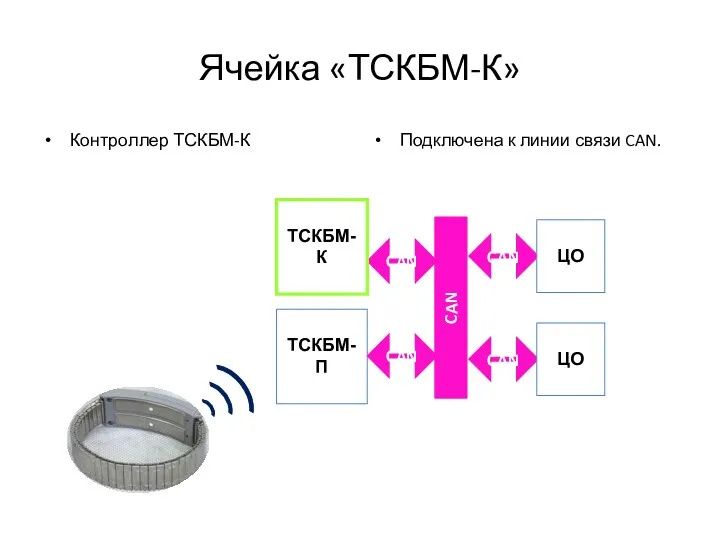
Ячейка «ТСКБМ-К»
Контроллер ТСКБМ-К
Подключена к линии связи CAN.
CAN
CAN
CAN
CAN
ЦО
ЦО
ТСКБМ-К
ТСКБМ-П
CAN
Ячейка «ТСКБМ-К»
Контроллер ТСКБМ-К
Подключена к линии связи CAN.
CAN
CAN
CAN
CAN
ЦО
ЦО
ТСКБМ-К
ТСКБМ-П
CAN
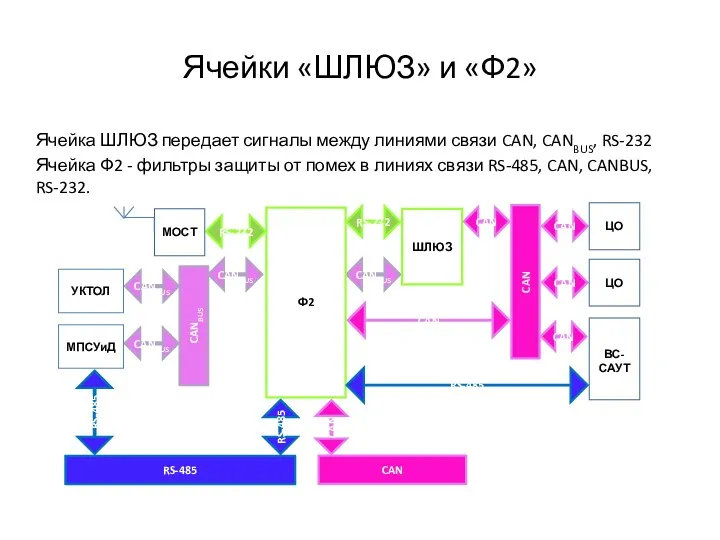
Ячейки «ШЛЮЗ» и «Ф2»
Ячейка ШЛЮЗ передает сигналы между линиями связи CAN,
Ячейки «ШЛЮЗ» и «Ф2»
Ячейка ШЛЮЗ передает сигналы между линиями связи CAN,
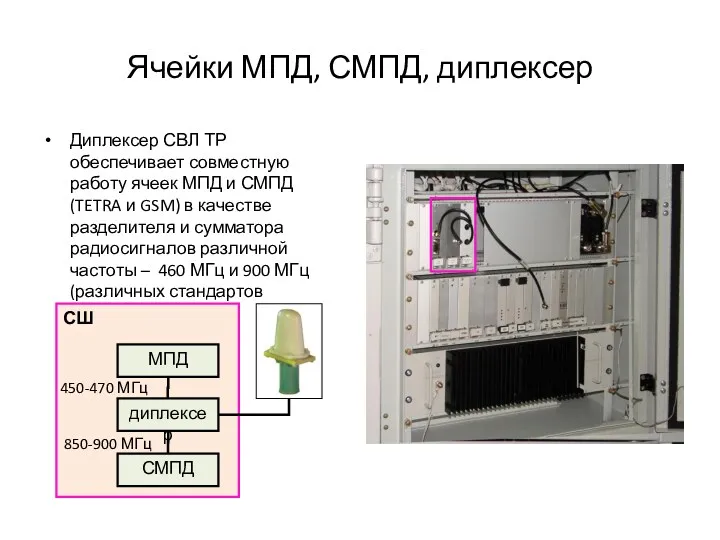
Ячейки МПД, СМПД, диплексер
Диплексер СВЛ ТР обеспечивает совместную работу ячеек МПД и СМПД
Ячейки МПД, СМПД, диплексер
Диплексер СВЛ ТР обеспечивает совместную работу ячеек МПД и СМПД

Ячейки МПД, СМПД, диплексер
Модуль Диплексер СВЛ ТР состоит из платы (1), модуля суммирования
Ячейки МПД, СМПД, диплексер
Модуль Диплексер СВЛ ТР состоит из платы (1), модуля суммирования
СШ
Ячейки МОСТ и дуплексный фильтр
Диплексер СВЛ ТР обеспечивает совместную работу ячеек СМПД и
СШ
Ячейки МОСТ и дуплексный фильтр
Диплексер СВЛ ТР обеспечивает совместную работу ячеек СМПД и

АНТЕННЫ
АЛ1/160
АЛ2/160/Н
АЛ2/460/900
АЛ2/460/900/Н
АЛ2/160/Н
АЛ2/460/900
+
+
АНТЕННЫ
АЛ1/160
АЛ2/160/Н
АЛ2/460/900
АЛ2/460/900/Н
АЛ2/160/Н
АЛ2/460/900
+
+
АНТЕННЫ
АНТЕННЫ

СШ
Антенна АЛ2/460/900/Н
Принимает сигналы диапазонов:
460 МГц;
900 МГц (GSM);
Сигналы спутниковой навигационной системы.
МПД (GSM)
СМПД
СШ
Антенна АЛ2/460/900/Н
Принимает сигналы диапазонов:
460 МГц;
900 МГц (GSM);
Сигналы спутниковой навигационной системы.
МПД (GSM)
СМПД
Ячейки СШ на электропоезде «Desiro Rus»
Ячейки СШ на электропоезде «Desiro Rus»

Ячейки СШ на электропоезде «Desiro Rus»/
Ячейки СКРМ, ДФ, ММ1
СКРМ - Обеспечивает
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейки СКРМ, ДФ, ММ1
СКРМ - Обеспечивает
Ячейки СШ на электропоезде «Desiro Rus»/
Модуль ЦО
CAN
CAN
CAN
ЦО
ЦО
Ячейки СШ на электропоезде «Desiro Rus»/
Модуль ЦО
CAN
CAN
CAN
ЦО
ЦО
Ячейки СШ на электропоезде «Desiro Rus»/
Модуль ЦО
CAN
CAN
CAN
CAN
ЦО
Организация и контроль функционирования различных
Ячейки СШ на электропоезде «Desiro Rus»/
Модуль ЦО
CAN
CAN
CAN
CAN
ЦО
Организация и контроль функционирования различных

Ячейки СШ на электропоезде «Desiro Rus»/
Ячейка ВС-САУТ
выдача команд разбор тяги и
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейка ВС-САУТ
выдача команд разбор тяги и
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейка ТСКБМ-К
обработка информации о физиологических параметрах
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейка ТСКБМ-К
обработка информации о физиологических параметрах
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейка ЭК-СНС
запись и хранение в энергонезависимой
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейка ЭК-СНС
запись и хранение в энергонезависимой
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейка ВДС
Прием и обработка дискретных сигналов
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейка ВДС
Прием и обработка дискретных сигналов
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейка вывода
Формирование управляющих воздействий по командам
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейка вывода
Формирование управляющих воздействий по командам
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейки Ф1 и Ф2
Ф1 - предназначен
Ячейки СШ на электропоезде «Desiro Rus»/
Ячейки Ф1 и Ф2
Ф1 - предназначен
Катушка приемная рельсовых сигналов
(КП-РС)
КП-РС предназначена для преобразования переменного магнитного поля частотой
Катушка приемная рельсовых сигналов
(КП-РС)
КП-РС предназначена для преобразования переменного магнитного поля частотой

Схема катушки КП-РС
Схема катушки КП-РС
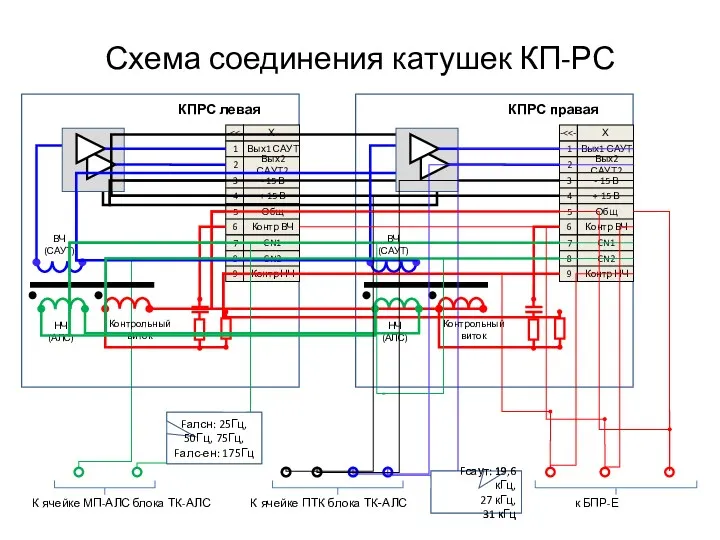
Схема соединения катушек КП-РС
Fалсн: 25Гц,
50Гц, 75Гц,
Fалс-ен: 175Гц
Fсаут: 19,6 кГц,
27 кГц,
31 кГц
Fсаут:
Схема соединения катушек КП-РС
Fалсн: 25Гц,
50Гц, 75Гц,
Fалс-ен: 175Гц
Fсаут: 19,6 кГц,
27 кГц,
31 кГц
Fсаут:
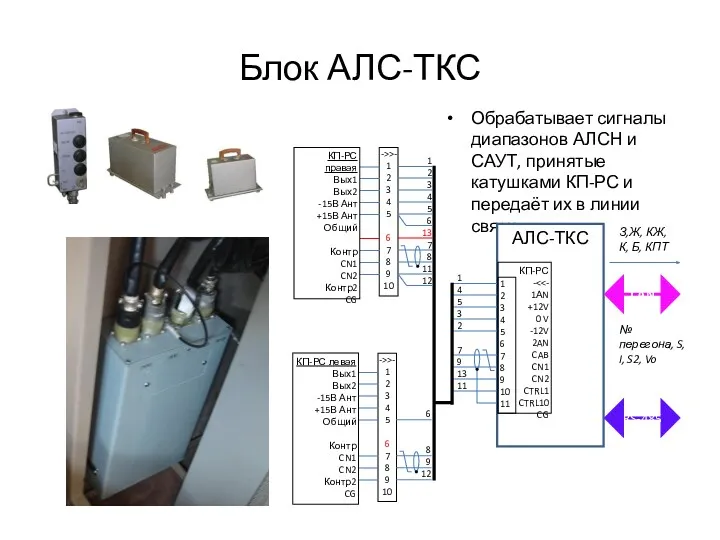
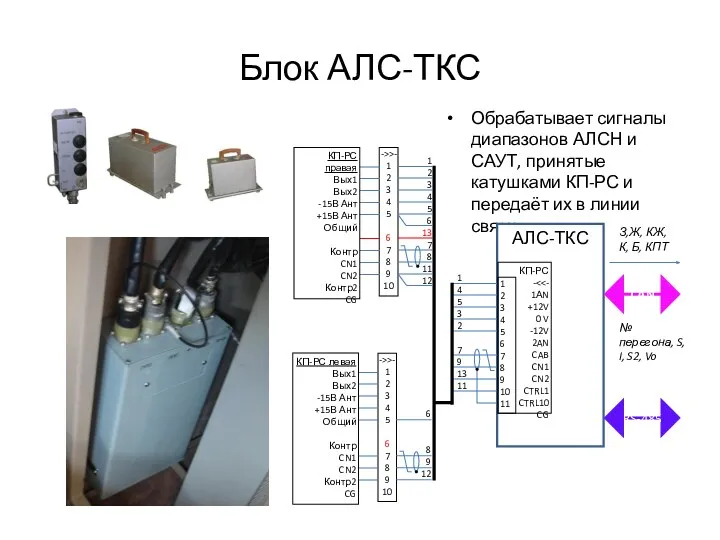
Блок АЛС-ТКС
Обрабатывает сигналы диапазонов АЛСН и САУТ, принятые катушками КП-РС и
Блок АЛС-ТКС
Обрабатывает сигналы диапазонов АЛСН и САУТ, принятые катушками КП-РС и
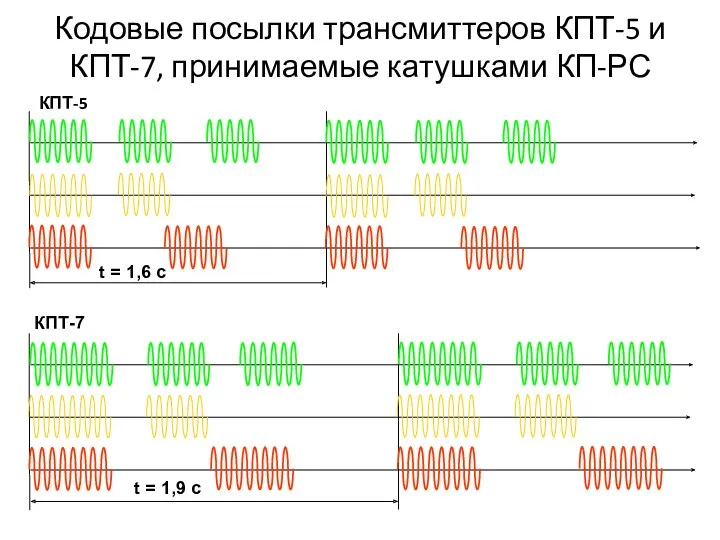
Кодовые посылки трансмиттеров КПТ-5 и КПТ-7, принимаемые катушками КП-РС
КПТ-5
КПТ-7
t = 1,6
Кодовые посылки трансмиттеров КПТ-5 и КПТ-7, принимаемые катушками КП-РС
КПТ-5
КПТ-7
t = 1,6

Приём информации правой катушкой КП-РС
от путевых устройств САУТ
САУТ-Ц
Предвходные
Входные
Маршрутные
Приём информации правой катушкой КП-РС
от путевых устройств САУТ
САУТ-Ц
Предвходные
Входные
Маршрутные

Для передачи информации от путевых устройств на локомотив используется явление электромагнитной
Для передачи информации от путевых устройств на локомотив используется явление электромагнитной
Блок АЛС-ТКС
Обрабатывает сигналы диапазонов АЛСН и САУТ, принятые катушками КП-РС и
Блок АЛС-ТКС
Обрабатывает сигналы диапазонов АЛСН и САУТ, принятые катушками КП-РС и
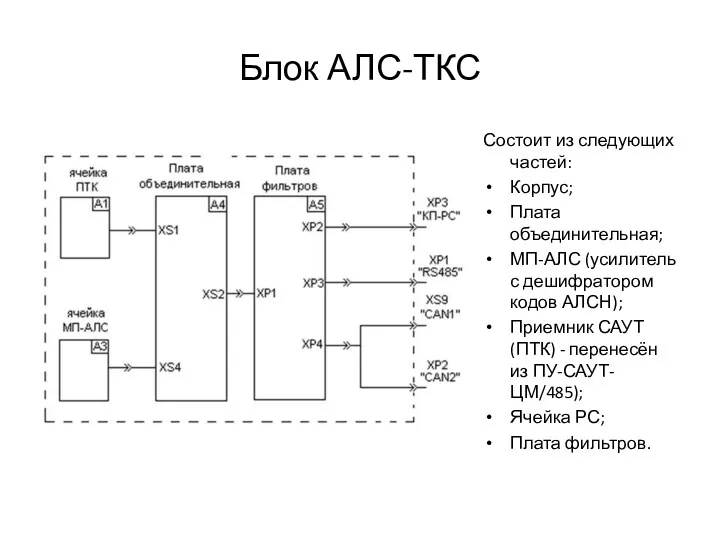
Блок АЛС-ТКС
Состоит из следующих частей:
Корпус;
Плата объединительная;
МП-АЛС (усилитель с дешифратором кодов АЛСН);
Приемник
Блок АЛС-ТКС
Состоит из следующих частей:
Корпус;
Плата объединительная;
МП-АЛС (усилитель с дешифратором кодов АЛСН);
Приемник
Блок АЛС-ТКС
Плата фильтров расположена между разъёмами и объединительной платой.
Входной сигнал, полученный
Блок АЛС-ТКС
Плата фильтров расположена между разъёмами и объединительной платой.
Входной сигнал, полученный
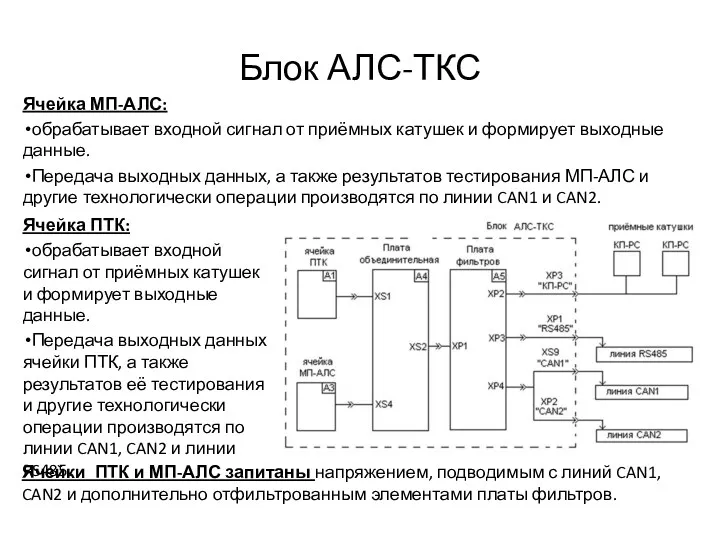
Блок АЛС-ТКС
Ячейка ПТК:
обрабатывает входной сигнал от приёмных катушек и формирует выходные
Блок АЛС-ТКС
Ячейка ПТК:
обрабатывает входной сигнал от приёмных катушек и формирует выходные
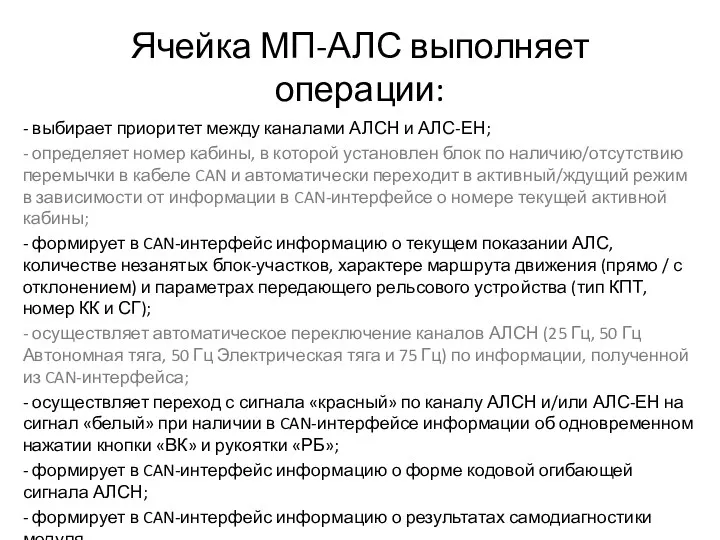
Ячейка МП-АЛС выполняет операции:
- выбирает приоритет между каналами АЛСН и
Ячейка МП-АЛС выполняет операции:
- выбирает приоритет между каналами АЛСН и
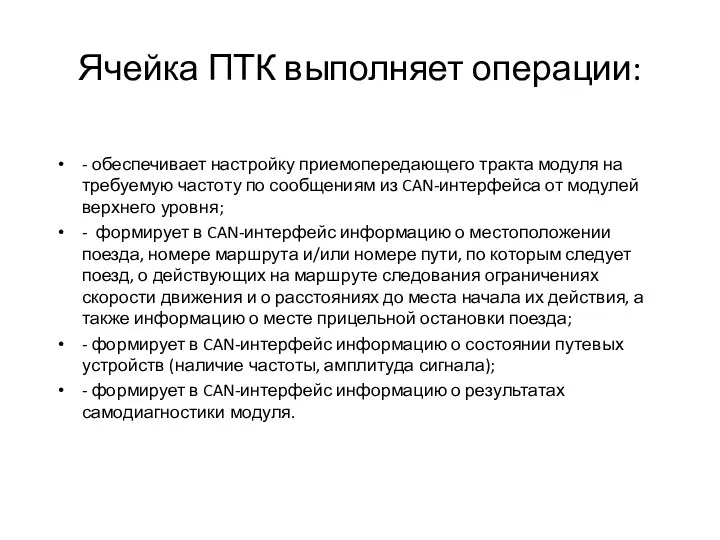
Ячейка ПТК выполняет операции:
- обеспечивает настройку приемопередающего тракта модуля на требуемую
Ячейка ПТК выполняет операции:
- обеспечивает настройку приемопередающего тракта модуля на требуемую
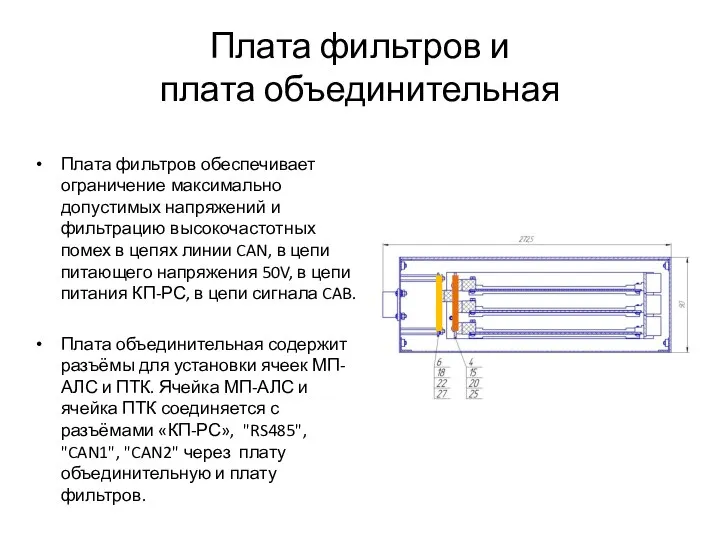
Плата фильтров и
плата объединительная
Плата фильтров обеспечивает ограничение максимально допустимых напряжений и
Плата фильтров и
плата объединительная
Плата фильтров обеспечивает ограничение максимально допустимых напряжений и
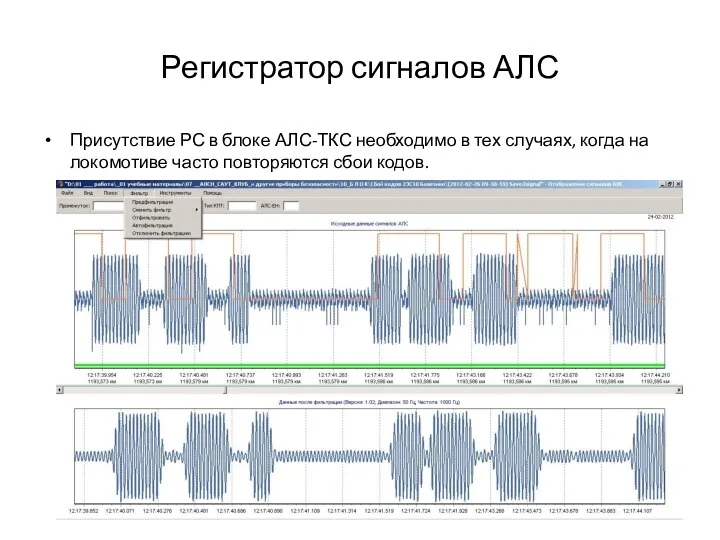
Регистратор сигналов АЛС
Присутствие РС в блоке АЛС-ТКС необходимо в тех случаях,
Регистратор сигналов АЛС
Присутствие РС в блоке АЛС-ТКС необходимо в тех случаях,

Датчики угла поворота ДПС-У
Датчики угла поворота ДПС-У
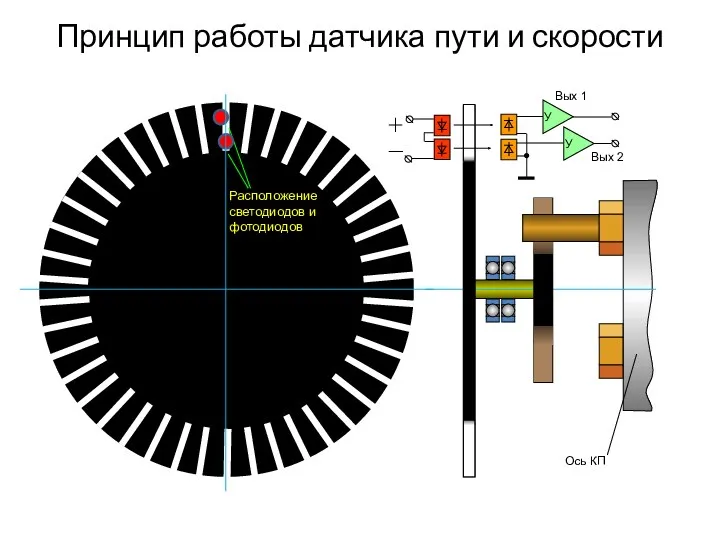
Принцип работы датчика пути и скорости
У
У
Вых 1
Вых 2
Ось КП
У
Расположение светодиодов и
Принцип работы датчика пути и скорости
У
У
Вых 1
Вых 2
Ось КП
У
Расположение светодиодов и

Блок связи БС-ДПС/М-БЗС-CAN
Обеспечивает измерение:
пройденного пути,
скорости,
ускорения,
скольжения колёсных пар;
Запоминает сбои и
Блок связи БС-ДПС/М-БЗС-CAN
Обеспечивает измерение:
пройденного пути,
скорости,
ускорения,
скольжения колёсных пар;
Запоминает сбои и
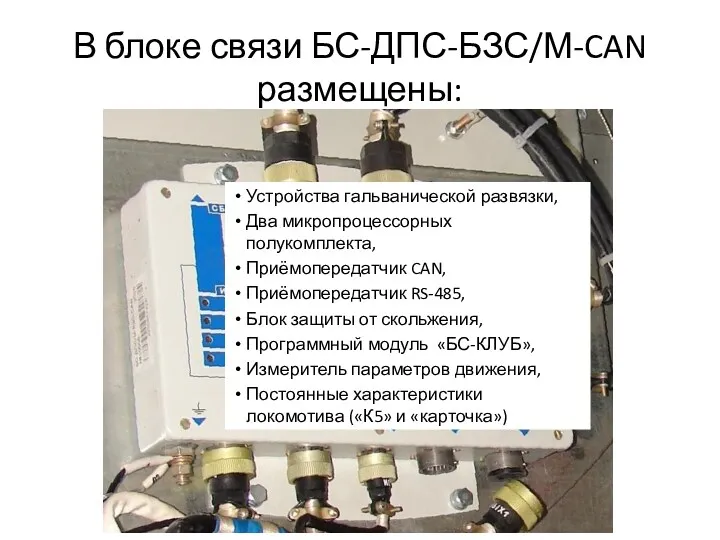
В блоке связи БС-ДПС-БЗС/М-CAN размещены:
Устройства гальванической развязки,
Два микропроцессорных полукомплекта,
Приёмопередатчик CAN,
Приёмопередатчик RS-485,
Блок
В блоке связи БС-ДПС-БЗС/М-CAN размещены:
Устройства гальванической развязки,
Два микропроцессорных полукомплекта,
Приёмопередатчик CAN,
Приёмопередатчик RS-485,
Блок
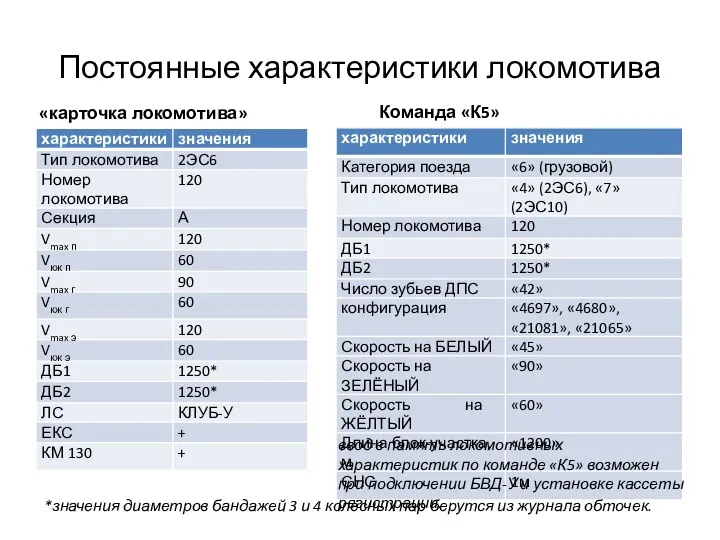
Постоянные характеристики локомотива
Команда «К5»
*значения диаметров бандажей 3 и 4 колёсных пар
Постоянные характеристики локомотива
Команда «К5»
*значения диаметров бандажей 3 и 4 колёсных пар
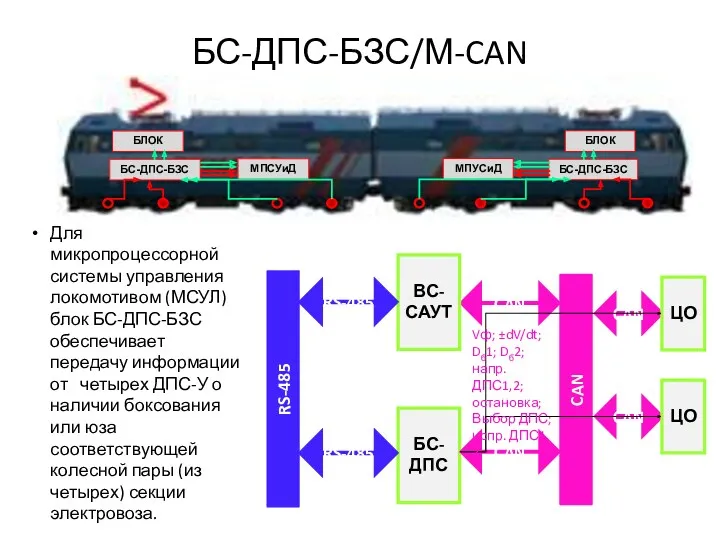
БС-ДПС-БЗС/М-CAN
Для микропроцессорной системы управления локомотивом (МСУЛ) блок БС-ДПС-БЗС обеспечивает передачу информации
БС-ДПС-БЗС/М-CAN
Для микропроцессорной системы управления локомотивом (МСУЛ) блок БС-ДПС-БЗС обеспечивает передачу информации
БС-ДПС-БЗС/М-CAN
Одновременно, от ДПС-У, установленных на буксы третьей и четвертой колесных пары,
БС-ДПС-БЗС/М-CAN
Одновременно, от ДПС-У, установленных на буксы третьей и четвертой колесных пары,
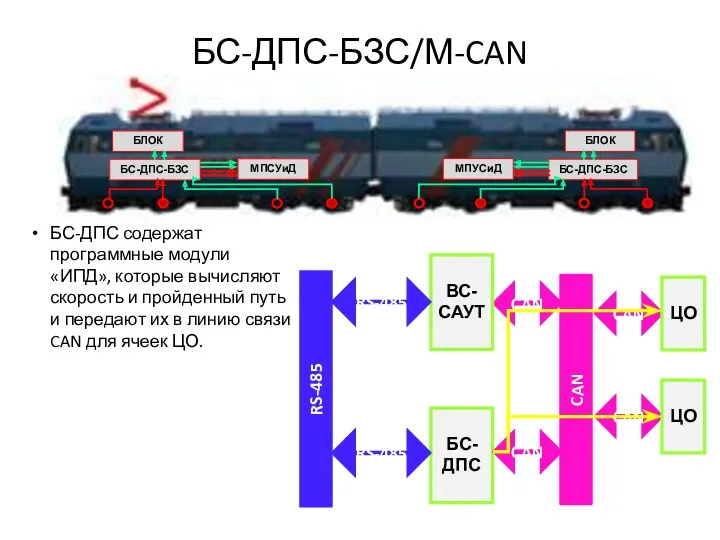
БС-ДПС-БЗС/М-CAN
БС-ДПС содержат программные модули «ИПД», которые вычисляют скорость и пройденный путь
БС-ДПС-БЗС/М-CAN
БС-ДПС содержат программные модули «ИПД», которые вычисляют скорость и пройденный путь
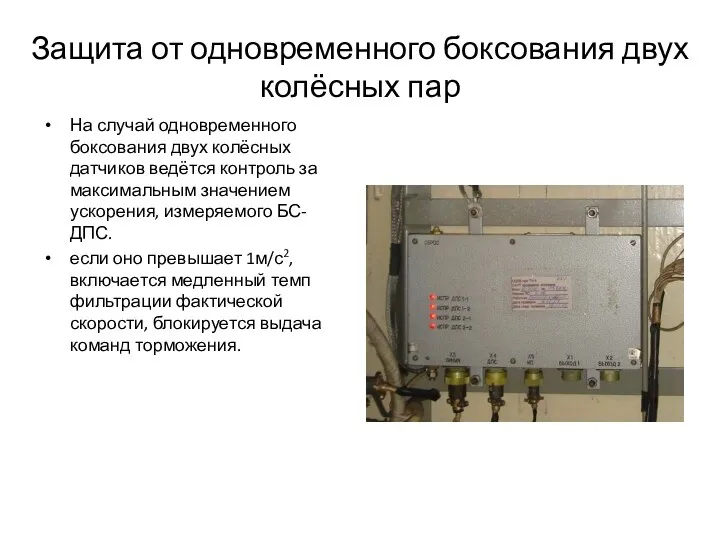
Защита от одновременного боксования двух колёсных пар
На случай одновременного боксования двух
Защита от одновременного боксования двух колёсных пар
На случай одновременного боксования двух
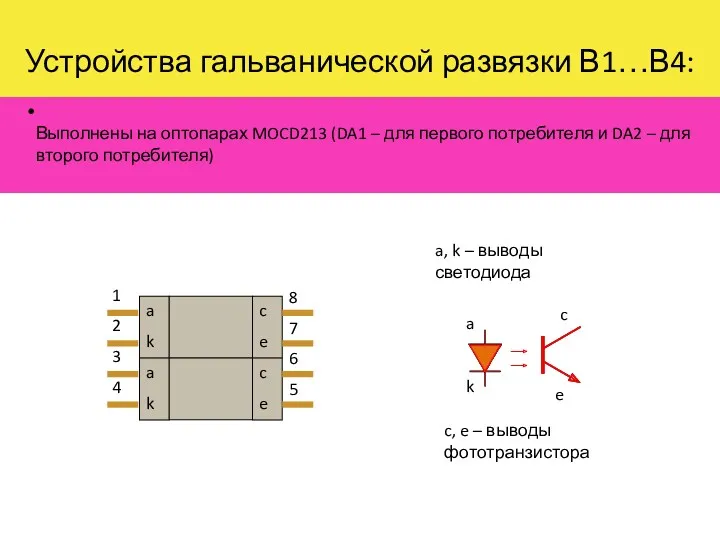
Устройства гальванической развязки В1…В4:
Выполнены на оптопарах MOCD213 (DA1 – для первого
Устройства гальванической развязки В1…В4:
Выполнены на оптопарах MOCD213 (DA1 – для первого

Модуль сигналов светофора МСС
36905-350-00
Модуль МСС предназначен для индикации сигналов АЛСН и
Модуль сигналов светофора МСС
36905-350-00
Модуль МСС предназначен для индикации сигналов АЛСН и
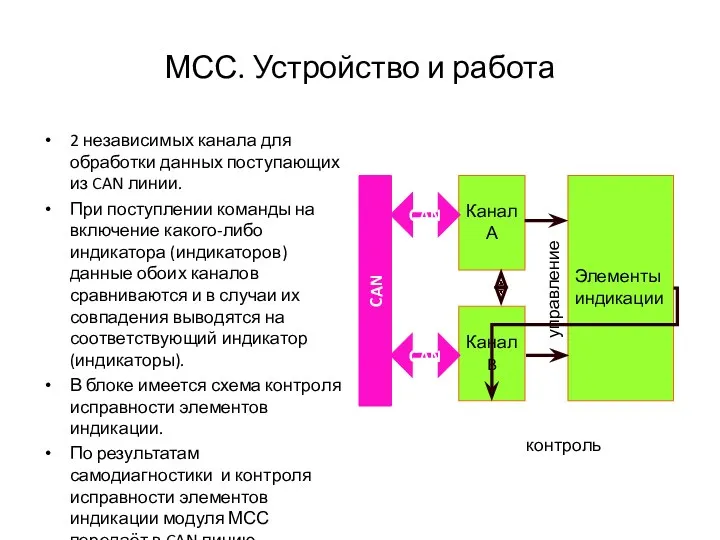
МСС. Устройство и работа
2 независимых канала для обработки данных поступающих из
МСС. Устройство и работа
2 независимых канала для обработки данных поступающих из
МСС. Устройство и работа
Для безопасной индикации сигналов АЛСН/АЛС-ЕН, управление группами светодиодов
МСС. Устройство и работа
Для безопасной индикации сигналов АЛСН/АЛС-ЕН, управление группами светодиодов

МОНИТОР
При включении источника питания ИП с выставленным напряжением (48±5) В должна
МОНИТОР
При включении источника питания ИП с выставленным напряжением (48±5) В должна
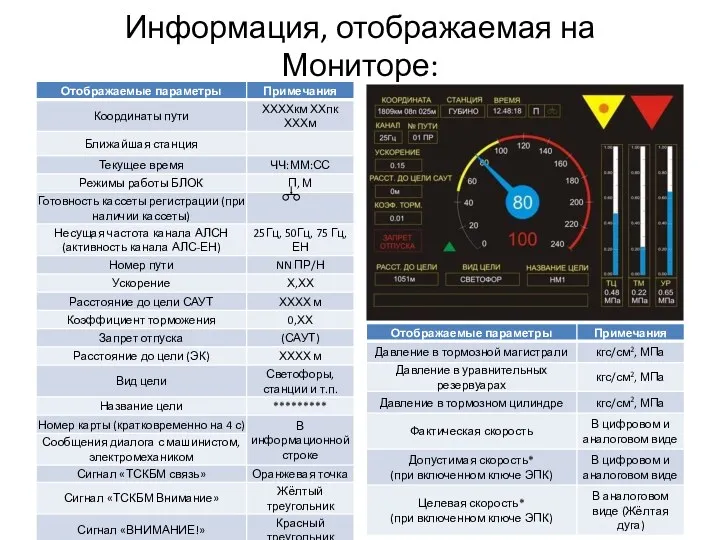
Информация, отображаемая на Мониторе:
Информация, отображаемая на Мониторе:
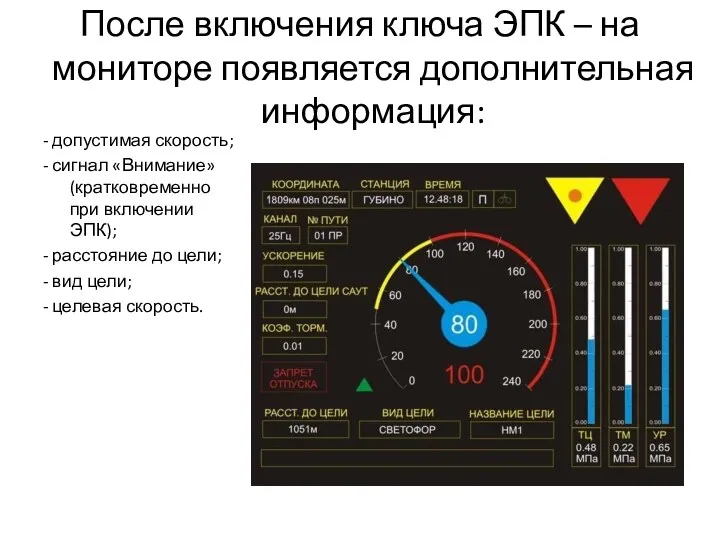
После включения ключа ЭПК – на мониторе появляется дополнительная информация:
- допустимая
После включения ключа ЭПК – на мониторе появляется дополнительная информация:
- допустимая

Расположение индикаторов информации на лицевой панели «Монитор 5»: (1)
1 - №
Расположение индикаторов информации на лицевой панели «Монитор 5»: (1)
1 - №

Расположение индикаторов информации на лицевой панели «Монитор 5»: (2)
5 - КОЭФ.
Расположение индикаторов информации на лицевой панели «Монитор 5»: (2)
5 - КОЭФ.

Расположение индикаторов информации на лицевой панели «Монитор 5»: (3)
8 - РАССТ.
Расположение индикаторов информации на лицевой панели «Монитор 5»: (3)
8 - РАССТ.

Расположение индикаторов информации на лицевой панели «Монитор 5»: (4)
11 - ВИД
Расположение индикаторов информации на лицевой панели «Монитор 5»: (4)
11 - ВИД

Расположение индикаторов информации на лицевой панели «Монитор 5»: (5)
15 - Шкала
Расположение индикаторов информации на лицевой панели «Монитор 5»: (5)
15 - Шкала

Расположение индикаторов информации на лицевой панели «Монитор 5»: (6)
19 - Сигнал
Расположение индикаторов информации на лицевой панели «Монитор 5»: (6)
19 - Сигнал
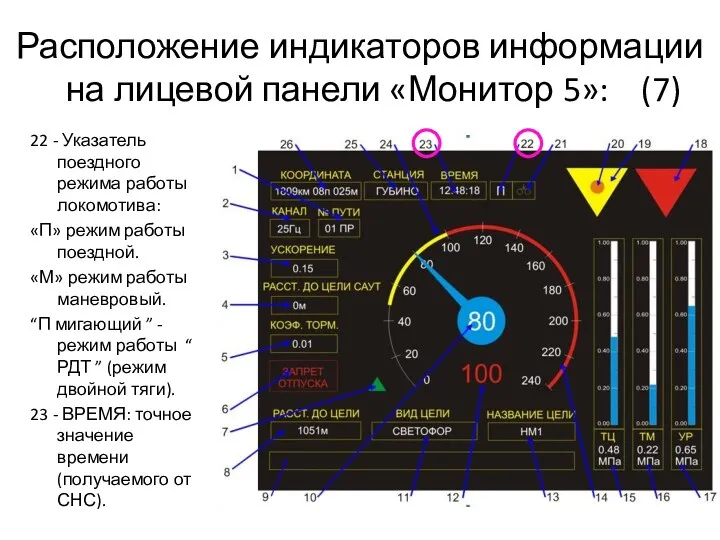
Расположение индикаторов информации на лицевой панели «Монитор 5»: (7)
22 - Указатель
Расположение индикаторов информации на лицевой панели «Монитор 5»: (7)
22 - Указатель

Расположение индикаторов информации на лицевой панели «Монитор 5»: (8)
24 - Значение
Расположение индикаторов информации на лицевой панели «Монитор 5»: (8)
24 - Значение

Информация от ячейки ВС-САУТ на мониторе
Расстояние до точки прицельной остановки
Запрет отпуска
Тормозной
Информация от ячейки ВС-САУТ на мониторе
Расстояние до точки прицельной остановки
Запрет отпуска
Тормозной

Модуль ввода 36905-250-00 (клавиатура)
Модуль предназначен для безопасного ввода параметров и опроса
Модуль ввода 36905-250-00 (клавиатура)
Модуль предназначен для безопасного ввода параметров и опроса

Модуль ввода 36905-250-00 (клавиатура)
Модуль ввода 36905-250-00 (клавиатура)
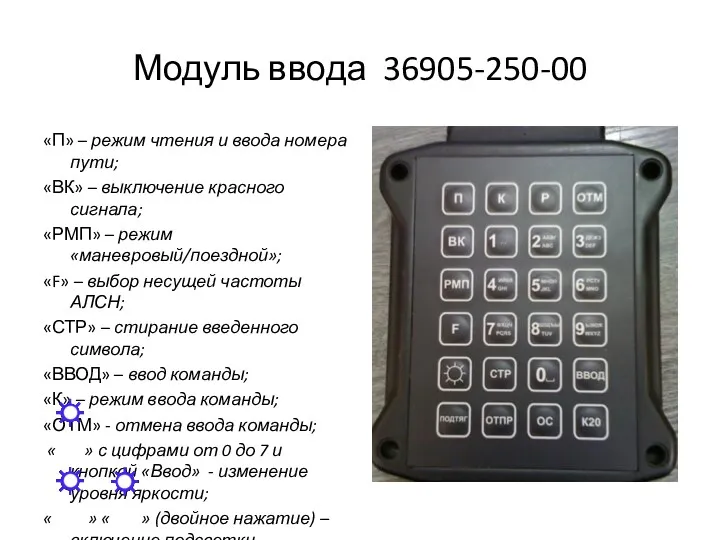
Модуль ввода 36905-250-00
«П» – режим чтения и ввода номера пути;
«ВК» –
Модуль ввода 36905-250-00
«П» – режим чтения и ввода номера пути;
«ВК» –
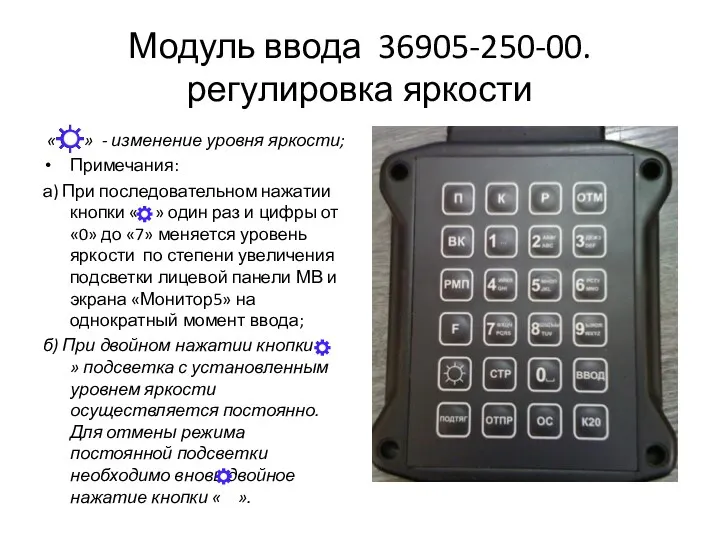
Модуль ввода 36905-250-00.
регулировка яркости
« » - изменение уровня яркости;
Примечания:
а) При
Модуль ввода 36905-250-00.
регулировка яркости
« » - изменение уровня яркости;
Примечания:
а) При

Регулировка яркости МСС, МВ
Нажать кнопку «☼» на МВ,
проконтролировать появление в информационной
Регулировка яркости МСС, МВ
Нажать кнопку «☼» на МВ,
проконтролировать появление в информационной

Модуль ввода 36905-250-00.
кнопки САУТ
«ПОДТЯГ» - разрешение движения поезда со скоростью не
Модуль ввода 36905-250-00.
кнопки САУТ
«ПОДТЯГ» - разрешение движения поезда со скоростью не
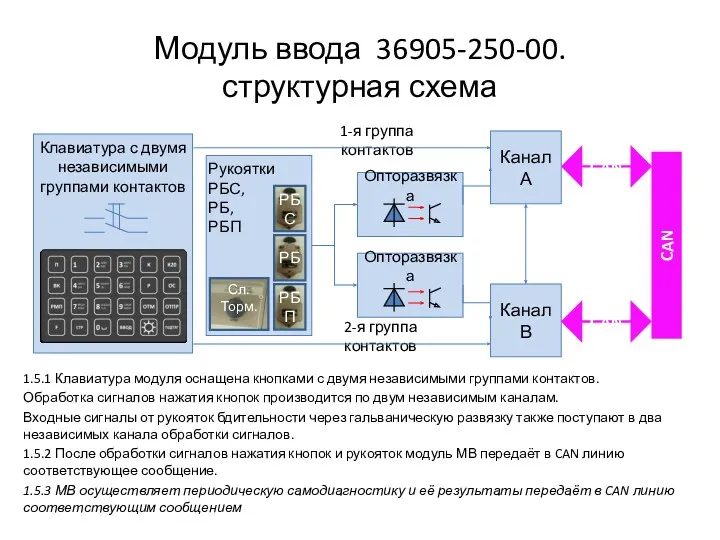
Модуль ввода 36905-250-00.
структурная схема
1.5.1 Клавиатура модуля оснащена кнопками с двумя независимыми
Модуль ввода 36905-250-00.
структурная схема
1.5.1 Клавиатура модуля оснащена кнопками с двумя независимыми

БИЛ-УМВ
БИЛ-УМВ

Рукоятки бдительности РБ, РБС, РБП
РБ
РБС
РБП
Рукоятки бдительности подключаются к модулю ввода, который
Рукоятки бдительности РБ, РБС, РБП
РБ
РБС
РБП
Рукоятки бдительности подключаются к модулю ввода, который
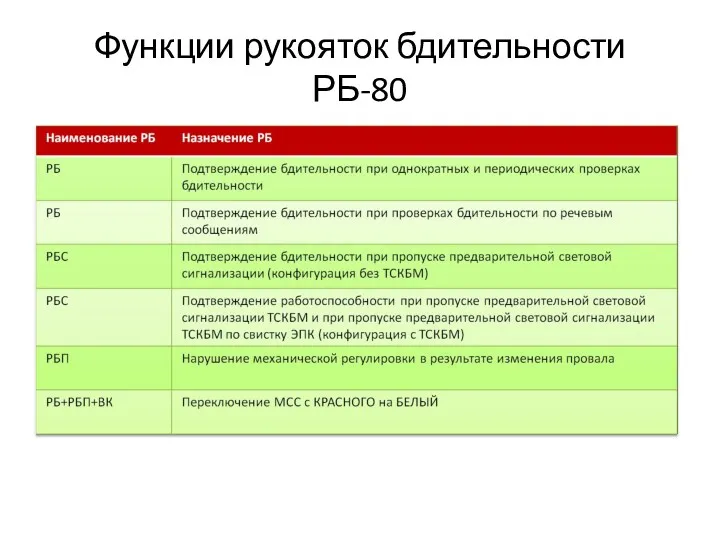
Функции рукояток бдительности РБ-80
Функции рукояток бдительности РБ-80
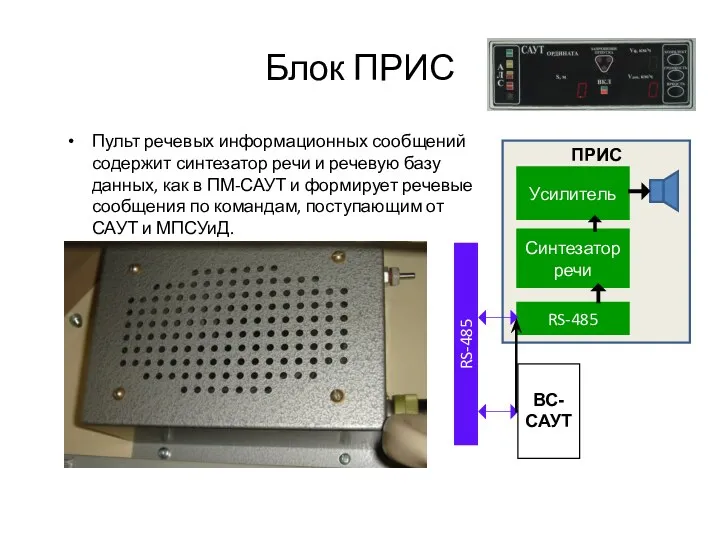
Блок ПРИС
Пульт речевых информационных сообщений содержит синтезатор речи и речевую базу
Блок ПРИС
Пульт речевых информационных сообщений содержит синтезатор речи и речевую базу

Блок связи со съёмным носителем БС-СН
Блок БС-СН предназначен для запитывания съёмного
Блок связи со съёмным носителем БС-СН
Блок БС-СН предназначен для запитывания съёмного

Блок регистрации БР-У
Регистрирует параметры поездки на кассету КЛУБ-У.
CAN
БР-У
Блок регистрации БР-У
Регистрирует параметры поездки на кассету КЛУБ-У.
CAN
БР-У

Подсистема ТСКБМ
Контроллер ТСКБМ – одна из ячеек системного блока.
Приемник ТСКБМ соединен
Подсистема ТСКБМ
Контроллер ТСКБМ – одна из ячеек системного блока.
Приемник ТСКБМ соединен

Сигналы ТСКБМ на мониторе (1)
Прием
Запрос подтверждения работоспособности
Предварительная сигнализация
Сигналы ТСКБМ на мониторе (1)
Прием
Запрос подтверждения работоспособности
Предварительная сигнализация

Сигналы ТСКБМ на мониторе (2)
Прием
Предварительная сигнализация
Запрос подтверждения работоспособности
Сигналы ТСКБМ на мониторе (2)
Прием
Предварительная сигнализация
Запрос подтверждения работоспособности
Взаимодействие БЛОК с тормозным оборудованием локомотива
торможение
давление
На электровозе 2ЭС6-046 БЛОК взаимодействует с
Взаимодействие БЛОК с тормозным оборудованием локомотива
торможение
давление
На электровозе 2ЭС6-046 БЛОК взаимодействует с
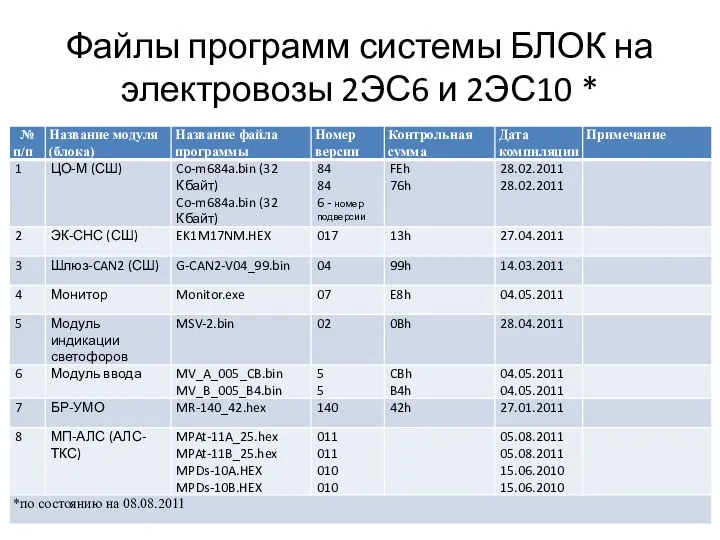
Файлы программ системы БЛОК на электровозы 2ЭС6 и 2ЭС10 *
Файлы программ системы БЛОК на электровозы 2ЭС6 и 2ЭС10 *
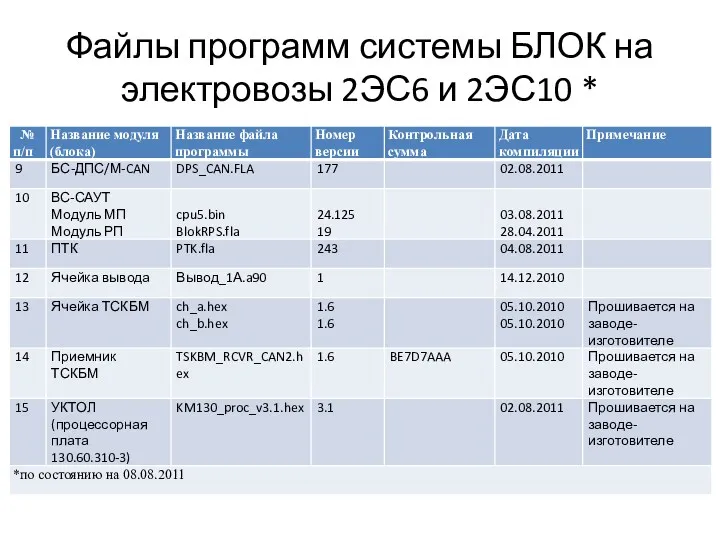
Файлы программ системы БЛОК на электровозы 2ЭС6 и 2ЭС10 *
Файлы программ системы БЛОК на электровозы 2ЭС6 и 2ЭС10 *
ПЕРЕЧЕНЬ КОМАНД БЛОК
14.09.11
ПЕРЕЧЕНЬ КОМАНД БЛОК
14.09.11
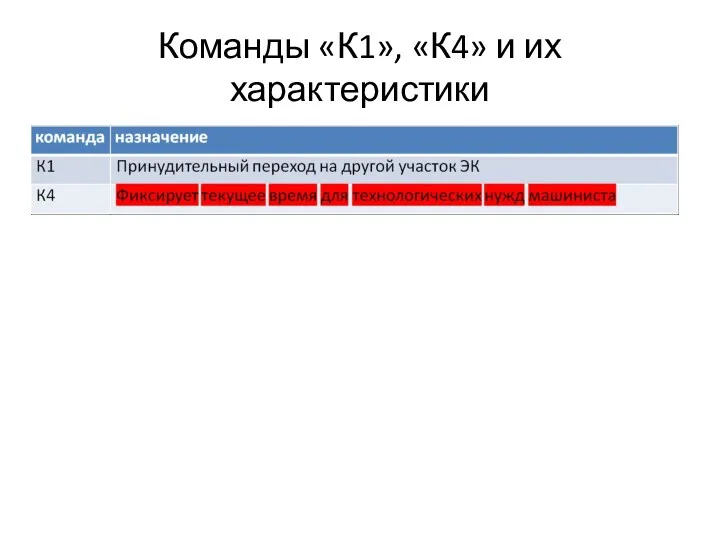
Команды «К1», «К4» и их характеристики
Команды «К1», «К4» и их характеристики
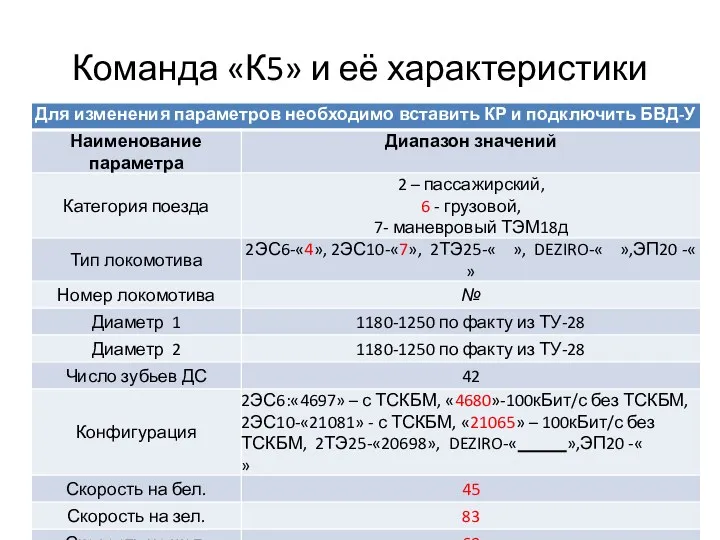
Команда «К5» и её характеристики
Команда «К5» и её характеристики
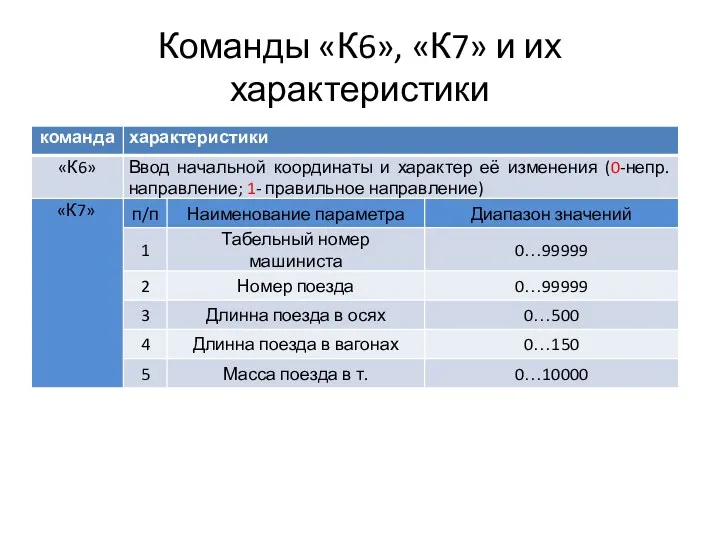
Команды «К6», «К7» и их характеристики
Команды «К6», «К7» и их характеристики
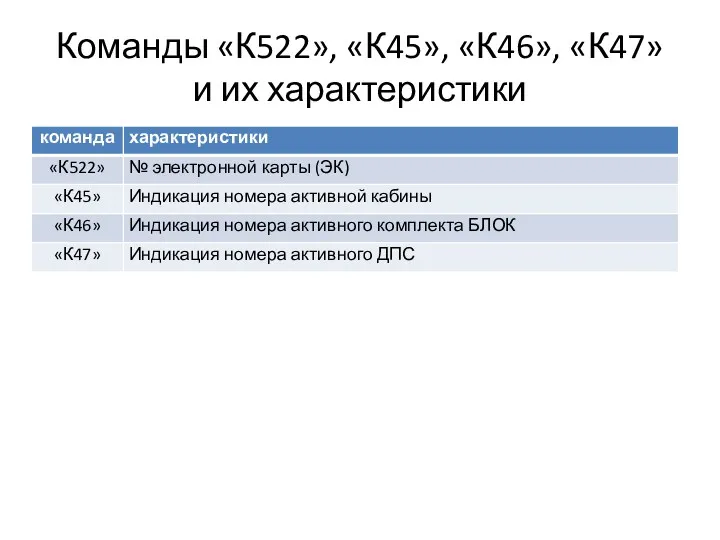
Команды «К522», «К45», «К46», «К47» и их характеристики
Команды «К522», «К45», «К46», «К47» и их характеристики
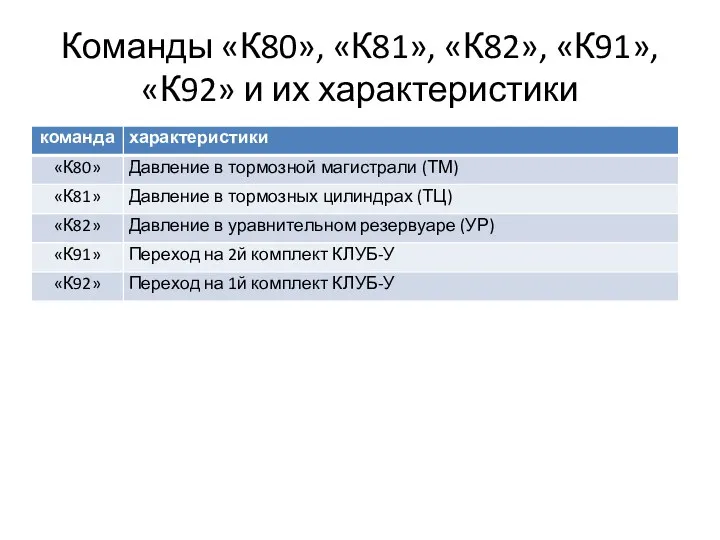
Команды «К80», «К81», «К82», «К91», «К92» и их характеристики
Команды «К80», «К81», «К82», «К91», «К92» и их характеристики


Конструктивные отличия БЛОК от систем КЛУБ-У, САУТ-ЦМ/485 и ТСКБМ
ПУ-САУТ-ЦМ отсутствует
Расшифровку сигналов,
Конструктивные отличия БЛОК от систем КЛУБ-У, САУТ-ЦМ/485 и ТСКБМ
ПУ-САУТ-ЦМ отсутствует
Расшифровку сигналов,

Конструктивные отличия БЛОК от систем КЛУБ-У, САУТ-ЦМ/485 и ТСКБМ
ПУ-САУТ-ЦМ отсутствует
Для ввода
Конструктивные отличия БЛОК от систем КЛУБ-У, САУТ-ЦМ/485 и ТСКБМ
ПУ-САУТ-ЦМ отсутствует
Для ввода
 Убинский сельсовет Убинского района Новосибирской области. Формирование комфортной городской среды
Убинский сельсовет Убинского района Новосибирской области. Формирование комфортной городской среды Наука и научное исследование. Методология научных исследований
Наука и научное исследование. Методология научных исследований Самопрезентация
Самопрезентация Презентация по работе профильного физико-математического лагеря
Презентация по работе профильного физико-математического лагеря Презентация к уроку в 8 классе Воздух
Презентация к уроку в 8 классе Воздух Презентация Дорожные знаки
Презентация Дорожные знаки Соединённое Королевство Великобритании и Северной Ирландии
Соединённое Королевство Великобритании и Северной Ирландии Права ребенка.
Права ребенка. Занятие Изготовление рамки для фотографий
Занятие Изготовление рамки для фотографий Родная, поздравляю тебя с днем рождения
Родная, поздравляю тебя с днем рождения Презентация 3
Презентация 3 Программируемая логическая интегральная схема (ПЛИС)
Программируемая логическая интегральная схема (ПЛИС) Система координат
Система координат Анализ контрольных и проверочных работ по русскому языку
Анализ контрольных и проверочных работ по русскому языку Культура ислама
Культура ислама Современные методы и формы работы с одаренными детьми
Современные методы и формы работы с одаренными детьми Водные богатства
Водные богатства Комплектація та монтаж релейних блочних стативів
Комплектація та монтаж релейних блочних стативів Презентация к открытому уроку: Аппликатурные принципы игры на аккордеоне.
Презентация к открытому уроку: Аппликатурные принципы игры на аккордеоне. презентация по химии
презентация по химии Хозяйство Германии
Хозяйство Германии Мини-музей Золотое кольцо России
Мини-музей Золотое кольцо России Аксонометрические проекции
Аксонометрические проекции Животные для малышей
Животные для малышей Презентация ко Дню России
Презентация ко Дню России Общее имущество собственников помещений в многоквартирном доме. Состав общего имущества в многоквартирном доме
Общее имущество собственников помещений в многоквартирном доме. Состав общего имущества в многоквартирном доме Бутерброды и горячие напитки
Бутерброды и горячие напитки Теории происхождения искусства
Теории происхождения искусства