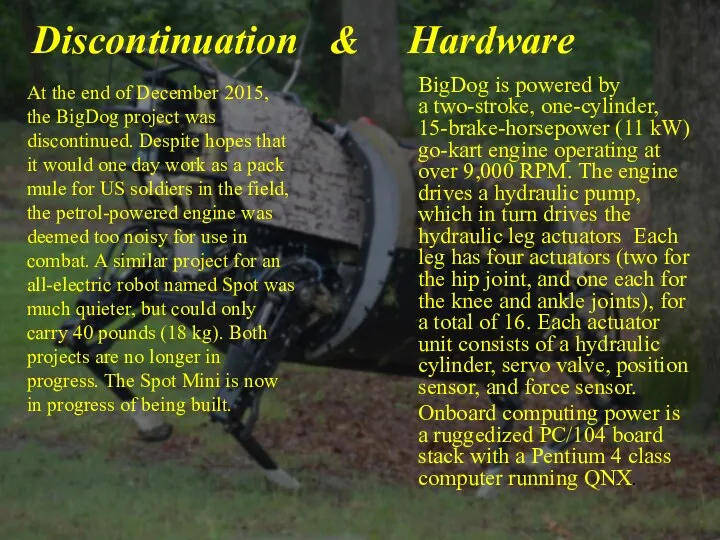
Discontinuation &
At the end of December 2015, the BigDog project was
discontinued. Despite hopes that it would one day work as a pack mule for US soldiers in the field, the petrol-powered engine was deemed too noisy for use in combat. A similar project for an all-electric robot named Spot was much quieter, but could only carry 40 pounds (18 kg). Both projects are no longer in progress. The Spot Mini is now in progress of being built.
Hardware
BigDog is powered by a two-stroke, one-cylinder, 15-brake-horsepower (11 kW) go-kart engine operating at over 9,000 RPM. The engine drives a hydraulic pump, which in turn drives the hydraulic leg actuators Each leg has four actuators (two for the hip joint, and one each for the knee and ankle joints), for a total of 16. Each actuator unit consists of a hydraulic cylinder, servo valve, position sensor, and force sensor.
Onboard computing power is a ruggedized PC/104 board stack with a Pentium 4 class computer running QNX.


 Интерьер столовой
Интерьер столовой Князья Киевской Руси
Князья Киевской Руси Тест по истории Санкт-Петербурга
Тест по истории Санкт-Петербурга Разводной мост
Разводной мост Господские Двунадесятые праздники
Господские Двунадесятые праздники Блоки микропроцессорного терминала
Блоки микропроцессорного терминала Презентация Гибридизация электронных орбиталей и геометрия молекул
Презентация Гибридизация электронных орбиталей и геометрия молекул Бюджет семьи и бережное потребление. Личное финансовое планирование
Бюджет семьи и бережное потребление. Личное финансовое планирование Поражающее действие электрического тока. Лекция 1
Поражающее действие электрического тока. Лекция 1 Анатомо-физиологические особенности строения полости рта в возрастном аспекте
Анатомо-физиологические особенности строения полости рта в возрастном аспекте Эрик Г. Эриксон: формирование личностной идентичности человека
Эрик Г. Эриксон: формирование личностной идентичности человека Придбання нової лінії з виробництва домашнього сиру ВАТ Галактон
Придбання нової лінії з виробництва домашнього сиру ВАТ Галактон Автоматизированные комплексы распределенного управления. Датчики
Автоматизированные комплексы распределенного управления. Датчики Шаблон Фракталы-4
Шаблон Фракталы-4 Презентация Архитектура
Презентация Архитектура Эстетическое воспитание дошкольников через декоративно – прикладное искусство.
Эстетическое воспитание дошкольников через декоративно – прикладное искусство. Экологический проект Чистое село
Экологический проект Чистое село Работа командира взвода по развёртыванию и эксплуатационному обслуживанию радиорелейных линий. Оценка пригодности интервалов РРЛ
Работа командира взвода по развёртыванию и эксплуатационному обслуживанию радиорелейных линий. Оценка пригодности интервалов РРЛ Жидкокристаллический индикатор (ЖКИ-LCD). Лекция 6
Жидкокристаллический индикатор (ЖКИ-LCD). Лекция 6 Спирты
Спирты Бизнес-центр Danilov Plaza г. Москва, аренда 2 этажа
Бизнес-центр Danilov Plaza г. Москва, аренда 2 этажа Прошедшее время глаголов haben и sein
Прошедшее время глаголов haben и sein Презентация к родительскому собранию Семья - моя радость
Презентация к родительскому собранию Семья - моя радость Продукционные модели. Лекция 9. Логические модели. Дедуктивные базы данных. Лекция 10
Продукционные модели. Лекция 9. Логические модели. Дедуктивные базы данных. Лекция 10 Презентация. Георгиевская ленточка.
Презентация. Георгиевская ленточка. Творческий отчет
Творческий отчет Презентация Артикуляционная гимнастика. Шипящие звуки
Презентация Артикуляционная гимнастика. Шипящие звуки Тас көмір шайыры-мұнайхимиялық синтездің шикізаты
Тас көмір шайыры-мұнайхимиялық синтездің шикізаты