Бойове застосування КЗА 86Ж6. Алгоритми обробки радiолокацiйної iнформацiї, виявлення та захоплення цiлей. (Тема 8.4) презентация
- Бойове застосування КЗА 86Ж6. Алгоритми обробки радiолокацiйної iнформацiї, виявлення та захоплення цiлей. (Тема 8.4)

Содержание
- 2. Устрій та бойове застосування КЗА 86Ж6 Тема № 8: Бойове застосування КЗА 86Ж6. Алгоритми розв'язання функціональних
- 3. ЛІТЕРАТУРА: Устрій та бойове застосування КЗА 86Ж6. Частина 1. (за редакцією Сторубльова О.І.) Навчальний посібник. -
- 4. Навчальні питання Група програм напівавтоматичного захоплення та супроводження цілей (ПАЗСЭ) Напівавтоматичне захоплення цілей Напівавтоматичне супроводження цілей
- 5. Робота системи в режимi напiвавтоматичного захоплення вiдбувається таким чином: При надходженнi вiд РМ повiдомлення виду КТ-ОП
- 6. в) режим дальність-кут місця (ДУ) рис. 4.1. Повідомлення КТ-ОП
- 7. Група програм ПАЗСЭ призначена для напівавтоматичного захоплення, супроводження та зняття з супроводження ПО, інформація по яких
- 8. Зав'язка траси по одиночних ПО (пеленгу) може виконуватись одним із способів: захоплення ПО по двох вводах
- 9. При захопленні групи ПО використовують спосіб зав'язки трас по одиночних ПО. Дії оператора: оператор виконує зав'язку
- 10. Для супроводження траси ПО оператор використовує такі види коректур: - проста коректура; - спецкоректура по положенню
- 11. Проста коректура вводиться, коли відхилення КТ-ОП від ЕТ не дуже велике, і в оператора немає сумнівів
- 12. При обробцi коректури розв'язуються такі задачi: розрахунок часу локацiї; ототожнення з iншими ПО; розрахунок параметрiв руху;
- 13. З робочого мiсця оператор має можливiсть ввести в формуляр ПО ознаки перешкод, державної належностi та склад
- 14. за допомогою оператора, шляхом введення на СВ-1 команди "Зняття" з координатами ПО (пеленга), що знiмається, чи
- 15. Виконується автоматично в два етапи. Спочатку ПО знімається умовно, тобто ПО супроводжується звичайним чином, але по
- 16. Послідовність виконання: - натиснуть на ПВ РМ клавішу М7; - сумістить маркер оператора з відміткою ПО;
- 17. Якщо ПО, по якому виконано перший ввод, вже супроводжується за даними іншого джерела, то на ввод
- 18. Виконується лише напівавтоматично по iнформацiї вiд основних РЛС таким чином: - нажати на ПВ РМ клавiшу
- 19. Пеленги передаються на автосупроводження, для цього до натискання клавiшi ВВОД нажати клавiшу ИС. Якщо оператор виконав
- 20. Необхідно суміщати на кожному огляді маркер оператора з відміткою ПО (при супроводженні пеленга за даними РЛС
- 21. Ввід коректури При пропуску коректури по цілі в процесі її супроводження, на другому знакомісці формуляра цілі
- 22. Спецкоректура При iстотному вiдхиленнi ЕТ вiд вiдмiтки пакету відлуння необхідно ввести спецкоректуру по положенню (СК1), при
- 23. Спецкоректури СК1 та СК2 необхідно вводить двома вводами: - сумістити маркер оператора з ЕТ та нажати
- 24. Якщо в процесі супроводження відбулось розділення відмітки цілі, то необхідно ввести координати нової цілі двома вводами:
- 25. Контрольний запит у III дiапазонi виконується оператором з вiдповiдного ПДУ за вказiвкою командира рлр шляхом натиснення
- 26. При наявностi радiоперешкод оператор повинен ввести вiдповiдну ознаку шляхом натиснення на ПВ клавiш 5 (ПО в
- 27. За ознаками, що вказуються командиром рлр, оператори зобов'язані виявляти маловисотні крилаті ракети та присвоювати цим ПО
- 29. Скачать презентацию
Устрій та бойове застосування КЗА 86Ж6
Тема № 8: Бойове застосування КЗА
Устрій та бойове застосування КЗА 86Ж6
Тема № 8: Бойове застосування КЗА
ЛІТЕРАТУРА:
Устрій та бойове застосування КЗА 86Ж6. Частина 1. (за редакцією Сторубльова
ЛІТЕРАТУРА:
Устрій та бойове застосування КЗА 86Ж6. Частина 1. (за редакцією Сторубльова
Навчальні питання
Група програм напівавтоматичного захоплення та супроводження цілей (ПАЗСЭ)
Напівавтоматичне
Навчальні питання
Група програм напівавтоматичного захоплення та супроводження цілей (ПАЗСЭ)
Напівавтоматичне
Робота системи в режимi напiвавтоматичного захоплення вiдбувається таким чином:
При надходженнi
Робота системи в режимi напiвавтоматичного захоплення вiдбувається таким чином:
При надходженнi
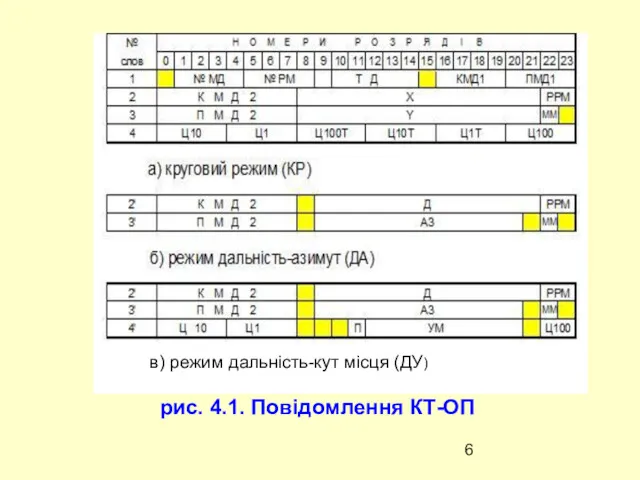
в) режим дальність-кут місця (ДУ)
рис. 4.1. Повідомлення КТ-ОП
в) режим дальність-кут місця (ДУ)
рис. 4.1. Повідомлення КТ-ОП
Група програм ПАЗСЭ призначена для напівавтоматичного захоплення, супроводження та зняття з
Група програм ПАЗСЭ призначена для напівавтоматичного захоплення, супроводження та зняття з
Зав'язка траси по одиночних ПО (пеленгу) може виконуватись одним із способів:
захоплення
Зав'язка траси по одиночних ПО (пеленгу) може виконуватись одним із способів:
захоплення
При захопленні групи ПО використовують спосіб зав'язки трас по одиночних ПО.
При захопленні групи ПО використовують спосіб зав'язки трас по одиночних ПО.
Для супроводження траси ПО оператор використовує такі види коректур:
- проста коректура;
-
Для супроводження траси ПО оператор використовує такі види коректур:
- проста коректура;
-
Проста коректура вводиться, коли відхилення КТ-ОП від ЕТ не дуже велике,
Проста коректура вводиться, коли відхилення КТ-ОП від ЕТ не дуже велике,
При обробцi коректури розв'язуються такі задачi:
розрахунок часу локацiї;
ототожнення з iншими
При обробцi коректури розв'язуються такі задачi:
розрахунок часу локацiї;
ототожнення з iншими
З робочого мiсця оператор має можливiсть ввести в формуляр ПО ознаки
З робочого мiсця оператор має можливiсть ввести в формуляр ПО ознаки
за допомогою оператора, шляхом введення на СВ-1 команди "Зняття" з координатами
за допомогою оператора, шляхом введення на СВ-1 команди "Зняття" з координатами
Виконується автоматично в два етапи.
Спочатку ПО знімається умовно, тобто ПО
Виконується автоматично в два етапи.
Спочатку ПО знімається умовно, тобто ПО
Послідовність виконання:
- натиснуть на ПВ РМ клавішу М7;
- сумістить маркер
Послідовність виконання:
- натиснуть на ПВ РМ клавішу М7;
- сумістить маркер
Якщо ПО, по якому виконано перший ввод, вже супроводжується за даними
Якщо ПО, по якому виконано перший ввод, вже супроводжується за даними
Виконується лише напівавтоматично по iнформацiї вiд основних РЛС таким чином:
-
Виконується лише напівавтоматично по iнформацiї вiд основних РЛС таким чином:
-
Пеленги передаються на автосупроводження, для цього до натискання клавiшi ВВОД нажати
Пеленги передаються на автосупроводження, для цього до натискання клавiшi ВВОД нажати
Необхідно суміщати на кожному огляді маркер оператора з відміткою ПО (при
Необхідно суміщати на кожному огляді маркер оператора з відміткою ПО (при
Ввід коректури
При пропуску коректури по цілі в процесі її супроводження,
Ввід коректури
При пропуску коректури по цілі в процесі її супроводження,
Спецкоректура
При iстотному вiдхиленнi ЕТ вiд вiдмiтки пакету відлуння необхідно ввести
Спецкоректура
При iстотному вiдхиленнi ЕТ вiд вiдмiтки пакету відлуння необхідно ввести
Спецкоректури СК1 та СК2 необхідно вводить двома вводами:
- сумістити маркер
Спецкоректури СК1 та СК2 необхідно вводить двома вводами:
- сумістити маркер
Якщо в процесі супроводження відбулось розділення відмітки цілі, то необхідно ввести
Якщо в процесі супроводження відбулось розділення відмітки цілі, то необхідно ввести
Контрольний запит у III дiапазонi виконується оператором з вiдповiдного ПДУ за
Контрольний запит у III дiапазонi виконується оператором з вiдповiдного ПДУ за
При наявностi радiоперешкод оператор повинен ввести вiдповiдну ознаку шляхом натиснення на
При наявностi радiоперешкод оператор повинен ввести вiдповiдну ознаку шляхом натиснення на
За ознаками, що вказуються командиром рлр, оператори зобов'язані виявляти маловисотні крилаті
За ознаками, що вказуються командиром рлр, оператори зобов'язані виявляти маловисотні крилаті
 Гипотеза исследования: Божественная комедия Данте и Мертвые души Н.В. Гоголя
Гипотеза исследования: Божественная комедия Данте и Мертвые души Н.В. Гоголя Монография Карла Юнга. Архетип и символ
Монография Карла Юнга. Архетип и символ Веселые куклы своими руками
Веселые куклы своими руками Театрализованная деятельность в детском саду
Театрализованная деятельность в детском саду Презетация Физминутка
Презетация Физминутка Комплекс артикуляционной гимнастики для самых маленьких
Комплекс артикуляционной гимнастики для самых маленьких Фото тортов и других десертов
Фото тортов и других десертов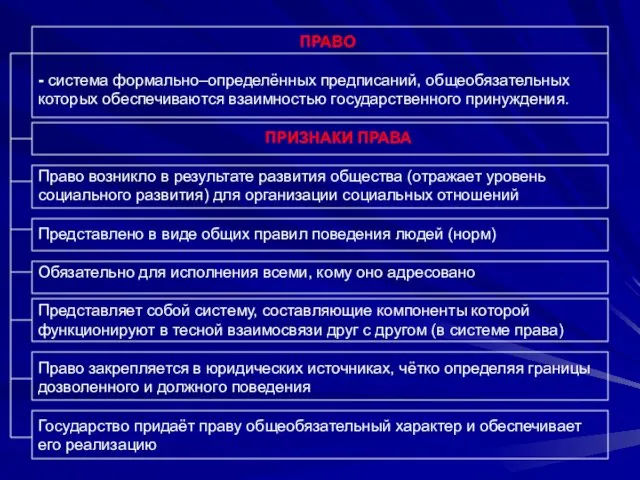 Происхождение, понятие и сущность права. (тема 9)
Происхождение, понятие и сущность права. (тема 9) agc150 training basic v1
agc150 training basic v1 Конструктивные элементы зданий
Конструктивные элементы зданий Презентация Информационная безопасность школьников
Презентация Информационная безопасность школьников Изготовление снежинки
Изготовление снежинки Основные термины и определения электробезопасности
Основные термины и определения электробезопасности Животноводство в Калмыкии
Животноводство в Калмыкии Города России. Владивосток
Города России. Владивосток Земля - наш дом. Экология моей малой родины - Приморский край
Земля - наш дом. Экология моей малой родины - Приморский край Приборное оборудование цифровых комплексов ПНО. Состав комплекса цифрового пилотажно-навигационного оборудования
Приборное оборудование цифровых комплексов ПНО. Состав комплекса цифрового пилотажно-навигационного оборудования Проект Наш класс - дружная семья
Проект Наш класс - дружная семья Организация питания
Организация питания Нарушения мышления: расстройства ассоциативного процесса. Патология суждений и умозаключений
Нарушения мышления: расстройства ассоциативного процесса. Патология суждений и умозаключений Мама
Мама Логоритмика как средство развития речи и ВПФ ребёнка с ОВЗ в соответствии с целевыми ориентирами ФГОС ДО.
Логоритмика как средство развития речи и ВПФ ребёнка с ОВЗ в соответствии с целевыми ориентирами ФГОС ДО. Угроза прерывания беременности, невынашивание – современный взгляд на проблему
Угроза прерывания беременности, невынашивание – современный взгляд на проблему Введение в робототехнику
Введение в робототехнику IV Свято-Елисаветинские детско-юношеские чтения Белый Ангел России
IV Свято-Елисаветинские детско-юношеские чтения Белый Ангел России Персонажи, которые предвосхитили явления и события будущего
Персонажи, которые предвосхитили явления и события будущего Презентация классного часа на тему Лучшее слово о дружбе
Презентация классного часа на тему Лучшее слово о дружбе Составление текста повествования по вопросам. 2 класс
Составление текста повествования по вопросам. 2 класс