- Частотные преобразователи

Содержание
- 2. НАЗНАЧЕНИЕ Управление скоростью вращения асинхронного электродвигателя в зависимости от управляющих сигналов Защита электродвигателя от перегрузок, перенапряжений
- 3. РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ
- 4. КЛАССИЧЕСКОЕ ПОДКЛЮЧЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ во время пуска двигателя происходит перегрузка по току в 5 – 7 раз
- 5. более 40% времени двигатель, подключенный по классической схеме, может работать вхолостую потребляемая мощность превышает требуемый уровень
- 6. Запуск в зависимости от уровня загазованности в помещении энергосбережение, только полезная работа отсутствие перегрузок сети защита
- 7. Зависимость скорости вращения двигателя от давления отсутствие гидроударов отсутствие перегрузок сети отсутствие скачков давления защита электродвигателя
- 8. использование частотников в центробежных насосах и вентиляторах для снижения рабочей скорости вращения приводит к кубическому уменьшению
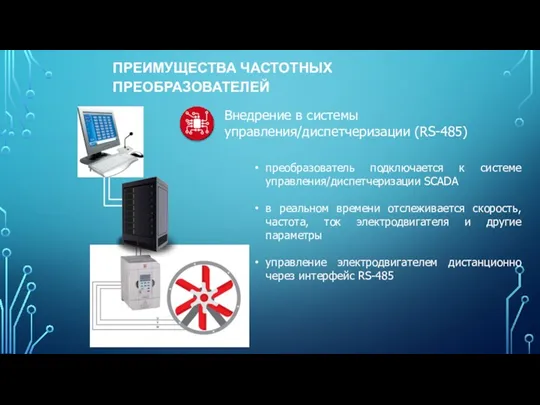
- 9. ПРЕИМУЩЕСТВА ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ Внедрение в системы управления/диспетчеризации (RS-485) преобразователь подключается к системе управления/диспетчеризации SCADA в реальном
- 10. Кратоковременная перегрузочная способность до 120-150% для механизмов, где допускаются кратковременные перегрузки на валу если перегрузка не
- 11. Встроенный программируемый контроллер Для решения простых задач по автоматизации, например: включить вытяжку на максимум через 30
- 12. ВИДЫ ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ По принципу построения: с непосредственной связью с промежуточным звеном постоянного тока По методу
- 13. силовая часть выполнена на тиристорах система управления поочередно отпирает группы тиристотров и подключает обмотки двигателя к
- 14. С ПРОМЕЖУТОЧНЫМ ЗВЕНОМ ПОСТОЯННОГО ТОКА Входное напряжение: выпрямляется в выпрямителе (В) фильтруется фильтром (Ф) сглаживается преобразуется
- 15. частотные преобразователи с непосредственной связью применяются для регулирования больших токов и напряжений, при узком диапазоне регулирования
- 16. ОСОБЕННОСТИ СКАЛЯРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ: предварительной настройка частоты и величины выходного тока (U/f = const) невозможно регулировать скорость
- 18. СХЕМА И ПОДКЛЮЧЕНИЕ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
- 19. КОНСТРУКЦИЯ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
- 20. Клеммы подключения питающей сети Разъем входов/выходов Клеммы подключения интерфейса КОНСТРУКЦИЯ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
- 21. КОНФИГУРАЦИОННОЕ ПО МСТ 10
- 23. Скачать презентацию

НАЗНАЧЕНИЕ
Управление скоростью вращения асинхронного электродвигателя в зависимости от управляющих сигналов
Защита электродвигателя
НАЗНАЧЕНИЕ
Управление скоростью вращения асинхронного электродвигателя в зависимости от управляющих сигналов
Защита электродвигателя
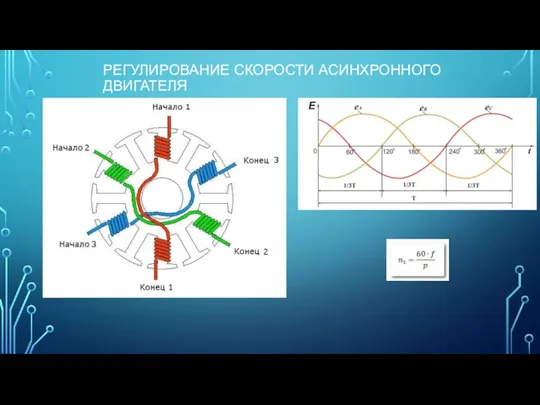
РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ
РЕГУЛИРОВАНИЕ СКОРОСТИ АСИНХРОННОГО ДВИГАТЕЛЯ

КЛАССИЧЕСКОЕ ПОДКЛЮЧЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ
во время пуска двигателя происходит перегрузка по току в
КЛАССИЧЕСКОЕ ПОДКЛЮЧЕНИЕ ЭЛЕКТРОДВИГАТЕЛЯ
во время пуска двигателя происходит перегрузка по току в

более 40% времени двигатель, подключенный по классической схеме, может работать вхолостую
потребляемая
более 40% времени двигатель, подключенный по классической схеме, может работать вхолостую
потребляемая
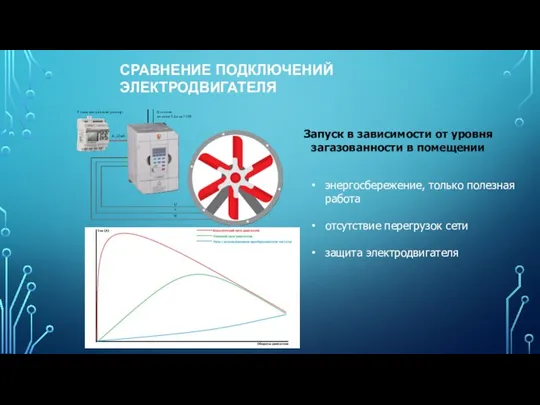
Запуск в зависимости от уровня загазованности в помещении
энергосбережение, только полезная работа
отсутствие
Запуск в зависимости от уровня загазованности в помещении
энергосбережение, только полезная работа
отсутствие

Зависимость скорости вращения двигателя от давления
отсутствие гидроударов
отсутствие перегрузок сети
отсутствие скачков давления
защита
Зависимость скорости вращения двигателя от давления
отсутствие гидроударов
отсутствие перегрузок сети
отсутствие скачков давления
защита
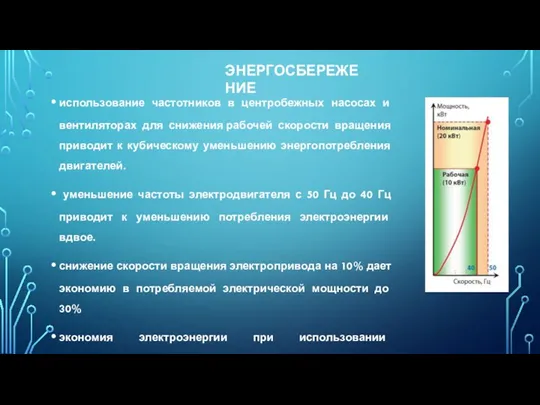
использование частотников в центробежных насосах и вентиляторах для снижения рабочей скорости вращения
использование частотников в центробежных насосах и вентиляторах для снижения рабочей скорости вращения
ПРЕИМУЩЕСТВА ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Внедрение в системы управления/диспетчеризации (RS-485)
преобразователь подключается к системе управления/диспетчеризации
ПРЕИМУЩЕСТВА ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
Внедрение в системы управления/диспетчеризации (RS-485)
преобразователь подключается к системе управления/диспетчеризации
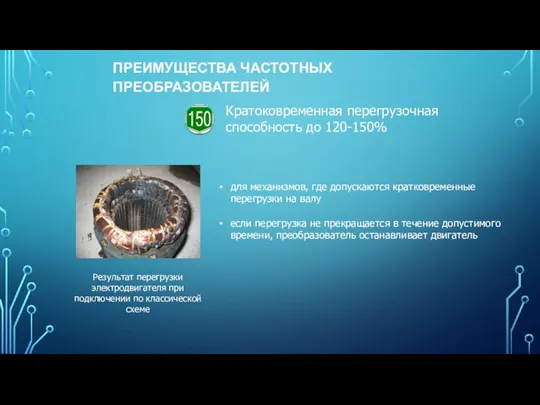
Кратоковременная перегрузочная способность до 120-150%
для механизмов, где допускаются кратковременные перегрузки на
Кратоковременная перегрузочная способность до 120-150%
для механизмов, где допускаются кратковременные перегрузки на
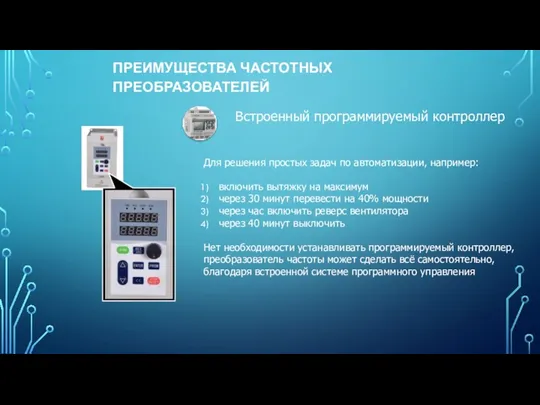
Встроенный программируемый контроллер
Для решения простых задач по автоматизации, например:
включить вытяжку
Встроенный программируемый контроллер
Для решения простых задач по автоматизации, например:
включить вытяжку
ВИДЫ ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
По принципу построения:
с непосредственной связью
с промежуточным звеном постоянного тока
По методу управления
ВИДЫ ЧАСТОТНЫХ ПРЕОБРАЗОВАТЕЛЕЙ
По принципу построения:
с непосредственной связью
с промежуточным звеном постоянного тока
По методу управления
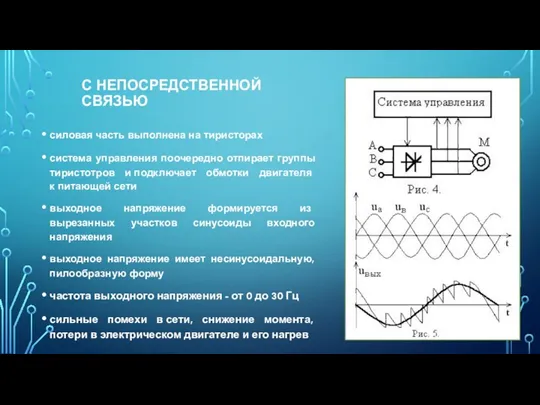
силовая часть выполнена на тиристорах
система управления поочередно отпирает группы тиристотров и подключает обмотки
силовая часть выполнена на тиристорах
система управления поочередно отпирает группы тиристотров и подключает обмотки
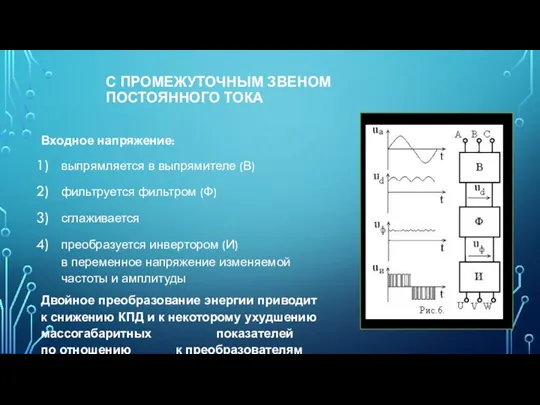
С ПРОМЕЖУТОЧНЫМ ЗВЕНОМ ПОСТОЯННОГО ТОКА
Входное напряжение:
выпрямляется в выпрямителе (В)
фильтруется фильтром (Ф)
сглаживается
преобразуется инвертором
С ПРОМЕЖУТОЧНЫМ ЗВЕНОМ ПОСТОЯННОГО ТОКА
Входное напряжение:
выпрямляется в выпрямителе (В)
фильтруется фильтром (Ф)
сглаживается
преобразуется инвертором
частотные преобразователи с непосредственной связью применяются для регулирования больших токов и
частотные преобразователи с непосредственной связью применяются для регулирования больших токов и

ОСОБЕННОСТИ СКАЛЯРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ:
предварительной настройка частоты и величины выходного тока (U/f = const)
невозможно
ОСОБЕННОСТИ СКАЛЯРНЫХ ПРЕОБРАЗОВАТЕЛЕЙ:
предварительной настройка частоты и величины выходного тока (U/f = const)
невозможно
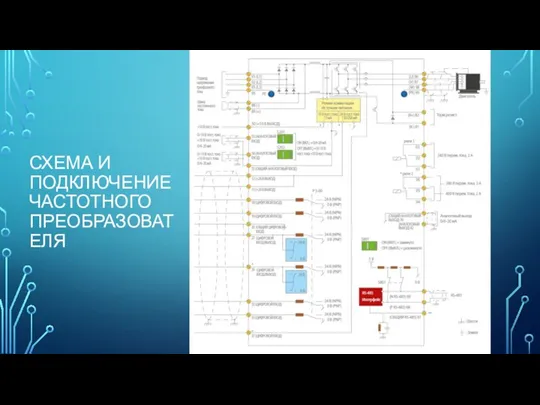
СХЕМА И ПОДКЛЮЧЕНИЕ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
СХЕМА И ПОДКЛЮЧЕНИЕ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ

КОНСТРУКЦИЯ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
КОНСТРУКЦИЯ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ

Клеммы подключения питающей сети
Разъем входов/выходов
Клеммы подключения интерфейса
КОНСТРУКЦИЯ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ
Клеммы подключения питающей сети
Разъем входов/выходов
Клеммы подключения интерфейса
КОНСТРУКЦИЯ ЧАСТОТНОГО ПРЕОБРАЗОВАТЕЛЯ

КОНФИГУРАЦИОННОЕ ПО МСТ 10
КОНФИГУРАЦИОННОЕ ПО МСТ 10
 Подготовка фонетической стороны речи для сдачи ЕГЭ по английскому языку
Подготовка фонетической стороны речи для сдачи ЕГЭ по английскому языку Страшилки. Не трогай старый сундук
Страшилки. Не трогай старый сундук презентация к дню семьи
презентация к дню семьи Интернет среди нас
Интернет среди нас презентация на тему:Красная книга народов России к уроку Население России
презентация на тему:Красная книга народов России к уроку Население России Гепатит В. Механизм передачи инфекции
Гепатит В. Механизм передачи инфекции ПРЕЗЕНТАЦИЯ ПРОЕКТА ЧТО НАМ ОСЕНЬ ПОДАРИЛА- ЧАСТЬ 4
ПРЕЗЕНТАЦИЯ ПРОЕКТА ЧТО НАМ ОСЕНЬ ПОДАРИЛА- ЧАСТЬ 4 Правила заполнения корректирующих форм cведений (раздел 6 расчета РСВ-1)
Правила заполнения корректирующих форм cведений (раздел 6 расчета РСВ-1) Психические процессы
Психические процессы Гидродинамические исследования скважин (ГДИС)
Гидродинамические исследования скважин (ГДИС) Катя, с днем рождения
Катя, с днем рождения Проєкт рубок догляду в твердолистяних насадженнях лисянського лісництва філії Звенигородське лісове господарство
Проєкт рубок догляду в твердолистяних насадженнях лисянського лісництва філії Звенигородське лісове господарство Общие понятия и классификация чрезвычайных ситуаций природного и техногенного характера
Общие понятия и классификация чрезвычайных ситуаций природного и техногенного характера Боль в животе
Боль в животе Линейные уравнения с двумя переменными
Линейные уравнения с двумя переменными За доблестный труд в ВОВ!!
За доблестный труд в ВОВ!! Общеразвивающие упражнения (ОРУ)
Общеразвивающие упражнения (ОРУ)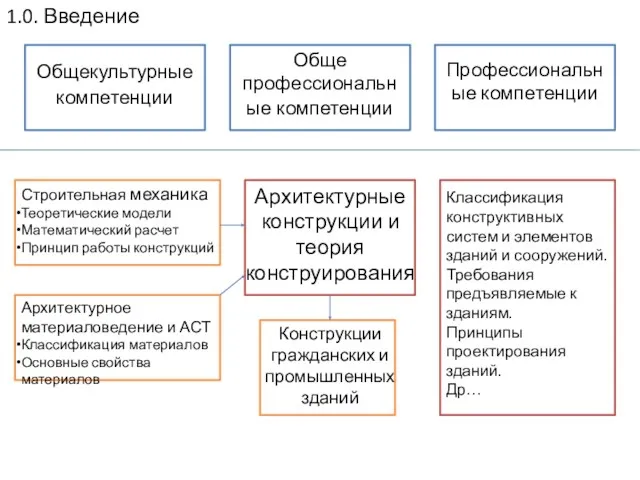 Общие понятия о конструкциях
Общие понятия о конструкциях MERLO V’s JCB Ag Range
MERLO V’s JCB Ag Range 20230824_posle_ts
20230824_posle_ts Эксплуатация насосных станций
Эксплуатация насосных станций Транспорт мира
Транспорт мира Основы личностной и коммуникативной культуры. О чем говорят слова-паразиты
Основы личностной и коммуникативной культуры. О чем говорят слова-паразиты Фразеологизмы как фрагмент языковой картины мира школьников
Фразеологизмы как фрагмент языковой картины мира школьников Договор подряда, его сторон, элементы и содержание
Договор подряда, его сторон, элементы и содержание Стандарт УУД
Стандарт УУД Дисперсия и поляризация
Дисперсия и поляризация Future Tenses
Future Tenses