- Движение робота по контуру TRIK Studio

Содержание
- 2. Задача 2 Написать алгоритм перемещения робота по трассе, размеченной черной линией. Движение вдоль линии с одним
- 3. 2D модель: движение по контуру
- 4. Энкодер (датчик угла) Энкодер – устройство, предназначенное для преобразования угла поворота вращающегося объекта (вала) в электрические
- 5. Калибровка автоматическая
- 6. Решение с релейным регулятором
- 8. Скачать презентацию
Задача 2
Написать алгоритм перемещения робота по трассе, размеченной черной линией. Движение
Задача 2
Написать алгоритм перемещения робота по трассе, размеченной черной линией. Движение
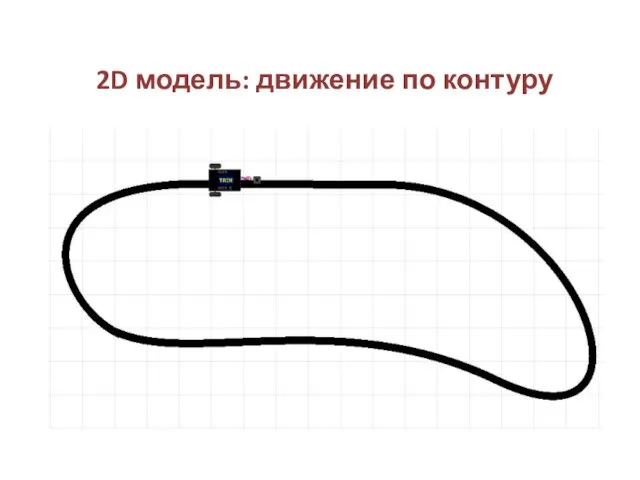
2D модель: движение по контуру
2D модель: движение по контуру
Энкодер (датчик угла)
Энкодер – устройство, предназначенное для преобразования угла поворота вращающегося
Энкодер (датчик угла)
Энкодер – устройство, предназначенное для преобразования угла поворота вращающегося

Калибровка автоматическая
Калибровка автоматическая

Решение с релейным регулятором
Решение с релейным регулятором
 Кружок Волшебная бумага
Кружок Волшебная бумага Железнодорожный транспорт России
Железнодорожный транспорт России Свойства тканей. Классификация текстильных волокон
Свойства тканей. Классификация текстильных волокон Основные характеристики компьютера
Основные характеристики компьютера Управление и алгоритмы
Управление и алгоритмы Топливно-энергетический комплекс России
Топливно-энергетический комплекс России Презентация Великая Отечественная война в моей семье...
Презентация Великая Отечественная война в моей семье... Презентации к урокам
Презентации к урокам Угол между векторами. Скалярное произведение векторов
Угол между векторами. Скалярное произведение векторов Написание ВКР на кафедре акушерства, гинекологии и репродуктологии
Написание ВКР на кафедре акушерства, гинекологии и репродуктологии Визуальная диагностика при комах
Визуальная диагностика при комах Религии Океании и Австралии
Религии Океании и Австралии Помоги животным!
Помоги животным! Права ребенка - обязанности родителей
Права ребенка - обязанности родителей Влияние среды на строение листа
Влияние среды на строение листа Святая Пасха
Святая Пасха Писатель и Книга. Юбиляры 2020 года
Писатель и Книга. Юбиляры 2020 года Общие сведения о резании металлов. Элементы процесса резания
Общие сведения о резании металлов. Элементы процесса резания Ботанические редкости Австралии
Ботанические редкости Австралии Родительское собрание В мир помоги войти с Надеждой и Любовью
Родительское собрание В мир помоги войти с Надеждой и Любовью Традиции и обычаи Индии.
Традиции и обычаи Индии. КТ1
КТ1 Древняя Индия
Древняя Индия Крайние точки России
Крайние точки России Горжусь тобой, моя Самара!
Горжусь тобой, моя Самара! Подготовка реферата по социальной информатике
Подготовка реферата по социальной информатике Игра Звёздный час
Игра Звёздный час Речевые ошибки и коммуникативный подход
Речевые ошибки и коммуникативный подход