- Движение вдоль линии с одним датчиком

Содержание
- 2. Движение вдоль линии Одной из задач, с которой сталкиваются при создании робота, является перемещение в пространстве.
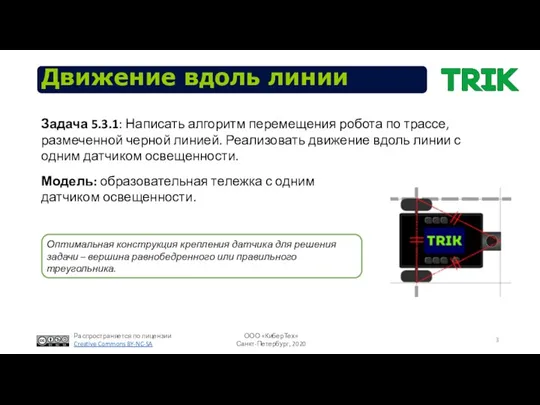
- 3. Движение вдоль линии Задача 5.3.1: Написать алгоритм перемещения робота по трассе, размеченной черной линией. Реализовать движение
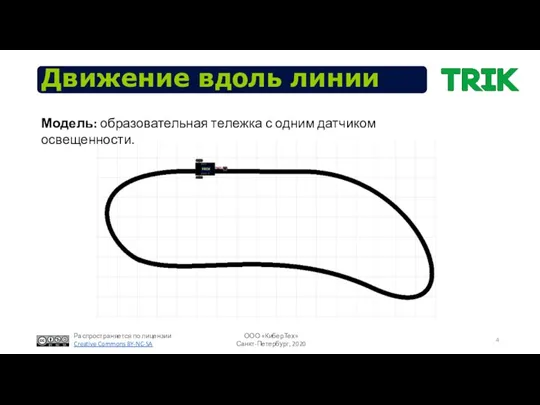
- 4. Движение вдоль линии Модель: образовательная тележка с одним датчиком освещенности.
- 5. Решение с релейным регулятором
- 6. Решение с релейным регулятором Калибровка может производиться двумя способами: 2) Произвести замер черного и белого отдельно
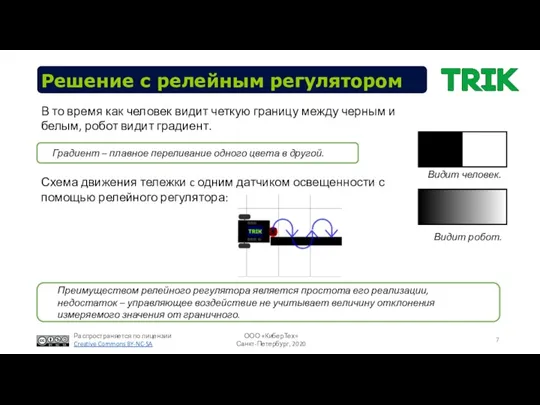
- 7. Решение с релейным регулятором В то время как человек видит четкую границу между черным и белым,
- 8. Решение с пропорциональным регулятором При использовании релейного регулятора радиус поворотов тележки не зависит от того, насколько
- 9. Решение с пропорциональным регулятором Вопросы по задаче: Что является желаемым значением? Что является текущим значением? Какой
- 11. Скачать презентацию
Движение вдоль линии
Одной из задач, с которой сталкиваются при создании робота,
Движение вдоль линии
Одной из задач, с которой сталкиваются при создании робота,
Движение вдоль линии
Задача 5.3.1: Написать алгоритм перемещения робота по трассе, размеченной
Движение вдоль линии
Задача 5.3.1: Написать алгоритм перемещения робота по трассе, размеченной
Движение вдоль линии
Модель: образовательная тележка с одним датчиком освещенности.
Движение вдоль линии
Модель: образовательная тележка с одним датчиком освещенности.
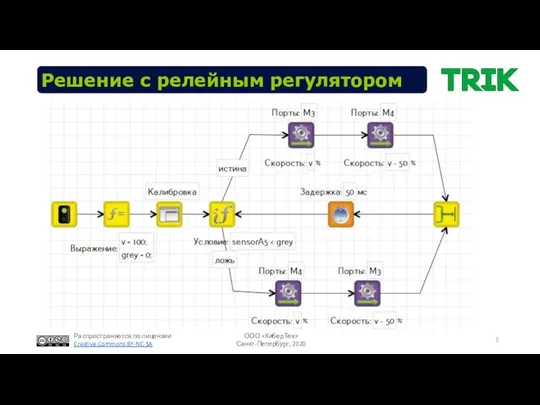
Решение с релейным регулятором
Решение с релейным регулятором

Решение с релейным регулятором
Калибровка может производиться двумя способами:
2) Произвести замер черного
Решение с релейным регулятором
Калибровка может производиться двумя способами:
2) Произвести замер черного
Решение с релейным регулятором
В то время как человек видит четкую границу
Решение с релейным регулятором
В то время как человек видит четкую границу

Решение с пропорциональным регулятором
При использовании релейного регулятора радиус поворотов тележки не
Решение с пропорциональным регулятором
При использовании релейного регулятора радиус поворотов тележки не
Решение с пропорциональным регулятором
Вопросы по задаче:
Что является желаемым значением?
Что является текущим
Решение с пропорциональным регулятором
Вопросы по задаче:
Что является желаемым значением?
Что является текущим
 Занятие по экологии Амурский тигр - хозяин Дальневосточной тайги
Занятие по экологии Амурский тигр - хозяин Дальневосточной тайги Система питания двигателя от газобаллонной установки
Система питания двигателя от газобаллонной установки Необычные животные
Необычные животные Игра Умницы и умники
Игра Умницы и умники Мажор, минор
Мажор, минор Особенности копинг-стратегий подростков, входящих в группу суицидального риска
Особенности копинг-стратегий подростков, входящих в группу суицидального риска Презентация Технология развивающих игр
Презентация Технология развивающих игр Презентация Хозяйство мира
Презентация Хозяйство мира презентация История робототехники
презентация История робототехники Микроконтроллеры. Платформа Arduino UNO
Микроконтроллеры. Платформа Arduino UNO Нейропсихологические основы современных методов коррекции речевых расстройств (Полуэктова Е. Н. - учитель-логопед)
Нейропсихологические основы современных методов коррекции речевых расстройств (Полуэктова Е. Н. - учитель-логопед) Оборудование процессов ректификации
Оборудование процессов ректификации Познавательно – игровая программа: Благодарное слово.
Познавательно – игровая программа: Благодарное слово. Задачи по управленческому учету
Задачи по управленческому учету Портативна координатно-вимірювальна машина
Портативна координатно-вимірювальна машина Куликовская битва
Куликовская битва Проект про маму
Проект про маму Тест Твое здоровье
Тест Твое здоровье Проект:Эх, да Масленица
Проект:Эх, да Масленица Система сбора и подготовки нефти
Система сбора и подготовки нефти Рисуем Космос
Рисуем Космос Материалы для родителей
Материалы для родителей Протокол HTTP
Протокол HTTP XXI Всероссийская олимпиада школьников по информатике
XXI Всероссийская олимпиада школьников по информатике Выставка Зимняя сказка
Выставка Зимняя сказка Мифы о космонавтике
Мифы о космонавтике Вода- источник жизни на земле (презентация)
Вода- источник жизни на земле (презентация) Общественно-транспортные комплексы
Общественно-транспортные комплексы