- Электрические машины автоматических устройств. Электрические машины переменного тока

Содержание
- 2. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Электрические
- 3. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Синхронные
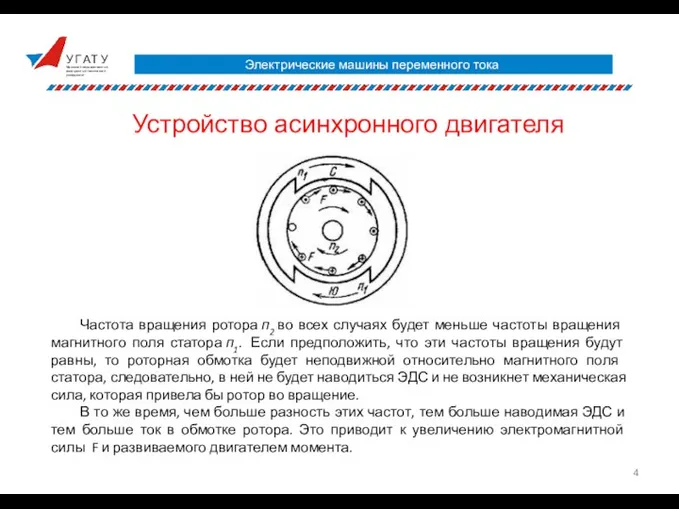
- 4. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Устройство
- 5. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Отставание
- 6. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Трехфазные
- 7. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Двигатель
- 8. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Для
- 9. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Принцип
- 10. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Вращающееся
- 11. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Ввиду
- 12. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Так
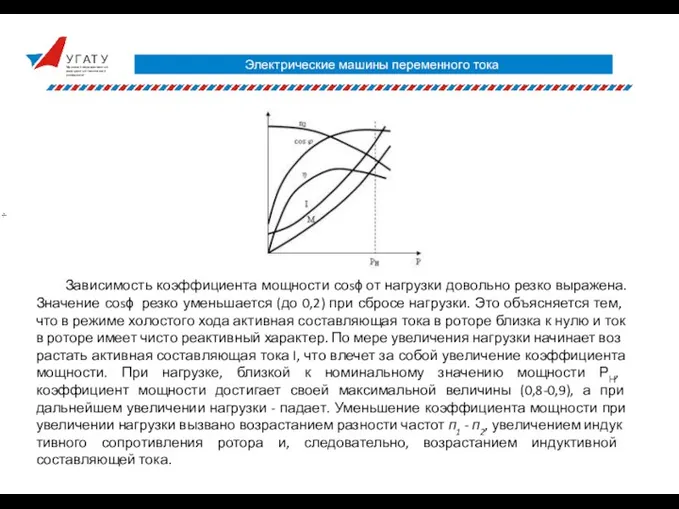
- 13. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Зависимость
- 14. У Г А Т У Уфимский государственный авиационный технический университет 1 Электрические машины переменного тока Для
- 16. Скачать презентацию
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
У Г А Т У
Уфимский государственный авиационный технический университет
1
Электрические машины переменного
 Сказочный зверинец в Санкт-Петербурге (Конные памятники)
Сказочный зверинец в Санкт-Петербурге (Конные памятники) С рюкзаком по Вологодской области
С рюкзаком по Вологодской области Ян Амос Коменский (1592—1670)
Ян Амос Коменский (1592—1670) Презентация Одаренные дети
Презентация Одаренные дети Презентация:История олимпийских игр
Презентация:История олимпийских игр Обмен информации через модем
Обмен информации через модем Взаимодействие детского сада с родителями
Взаимодействие детского сада с родителями Макаронные изделия
Макаронные изделия Устройство реактора
Устройство реактора Горение твердого топлива
Горение твердого топлива Sights оf Donbass. Welcome to Donetsk
Sights оf Donbass. Welcome to Donetsk Переробка нафти
Переробка нафти Электрические нагрузки промышленных предприятий. Номинальные режимы работы ЭП
Электрические нагрузки промышленных предприятий. Номинальные режимы работы ЭП Презентация для детей с ОНР на развитие фонематического восприятия, анализа и синтаза по лексической теме Зимние виды спорта
Презентация для детей с ОНР на развитие фонематического восприятия, анализа и синтаза по лексической теме Зимние виды спорта Проблема наркомании в художественной литературе
Проблема наркомании в художественной литературе Типовые детали и механизмы металлорежущих станков
Типовые детали и механизмы металлорежущих станков Презентация для классного часа Учитесь дружбой дорожить
Презентация для классного часа Учитесь дружбой дорожить Учимся читать.
Учимся читать. Функциональная организация персонального компьютера. Внутренние запоминающие устройства, их состав и назначение
Функциональная организация персонального компьютера. Внутренние запоминающие устройства, их состав и назначение Coastal stage and rearrange
Coastal stage and rearrange Электронно-дырочный переход. Идеальный p-n переход
Электронно-дырочный переход. Идеальный p-n переход 40-55 жас аралығындағы ішек өткізбеушілігі диагнозымен ауыратын науқастарда перитониттің алдын алу үшін энтеростомияға қарағанда
40-55 жас аралығындағы ішек өткізбеушілігі диагнозымен ауыратын науқастарда перитониттің алдын алу үшін энтеростомияға қарағанда Презентация пректа Интеллектуальный журнал для детей и родителей Занимательные игры
Презентация пректа Интеллектуальный журнал для детей и родителей Занимательные игры Фокус-группа. Методики, используемые в качественных исследованиях товаров
Фокус-группа. Методики, используемые в качественных исследованиях товаров Презентация к 1 ур Экономика 1990г
Презентация к 1 ур Экономика 1990г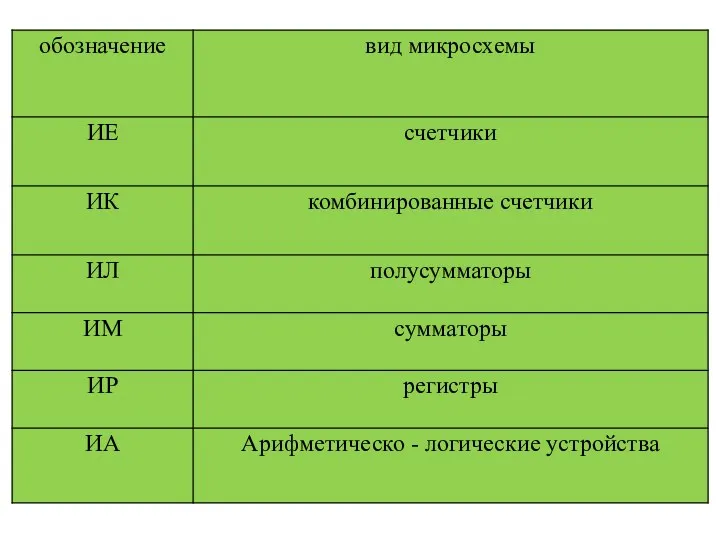 Характеристики интегральных схем (ИС)
Характеристики интегральных схем (ИС) Миграция и прирост населения. Тренажер (9 класс)
Миграция и прирост населения. Тренажер (9 класс) Тема лекции: Основы технологии сварочного производства
Тема лекции: Основы технологии сварочного производства