- Электромеханические исполнительные элементы

Содержание
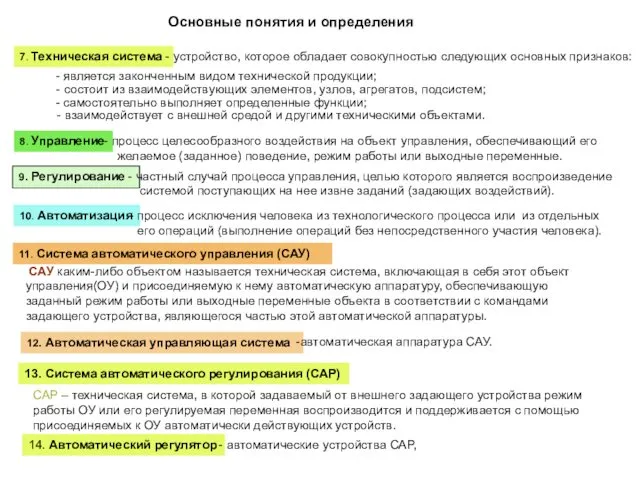
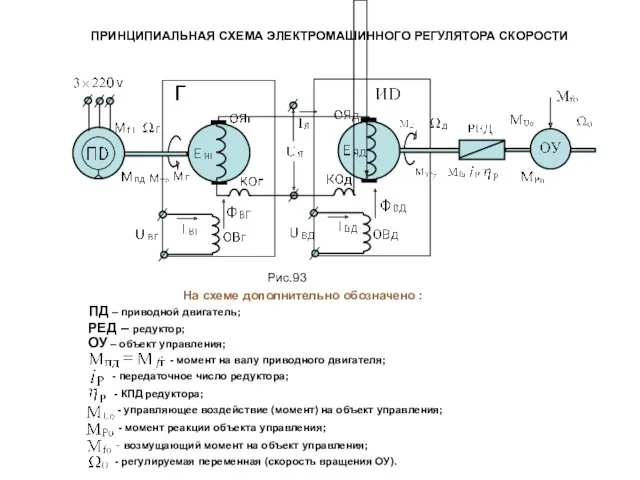
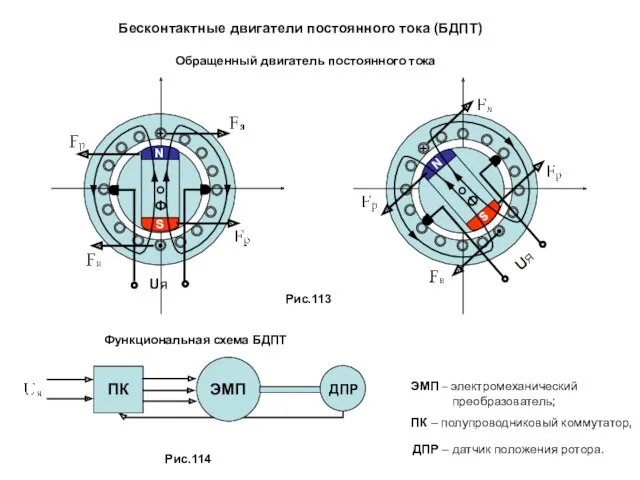
- 7. СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРЯМОГО ДЕЙСТВИЯ РЕГУЛЯТОР ПОЛЗУНОВА РЕГУЛЯТОР УАТТА
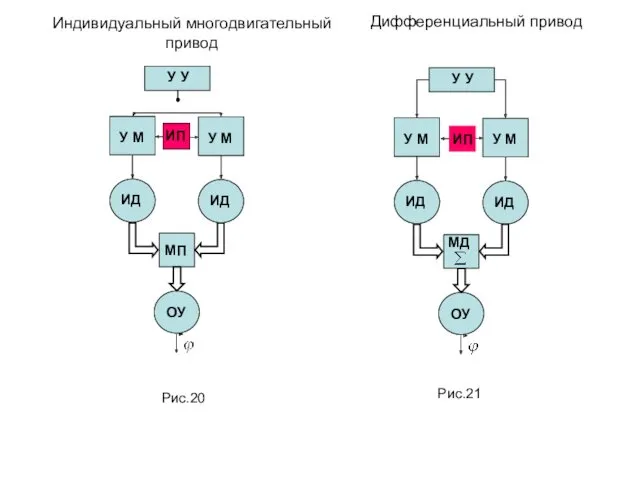
- 11. Классификация приводов по схеме построения силовой части
- 13. Многокоординатный привод (система приводов) ИП Рис.22
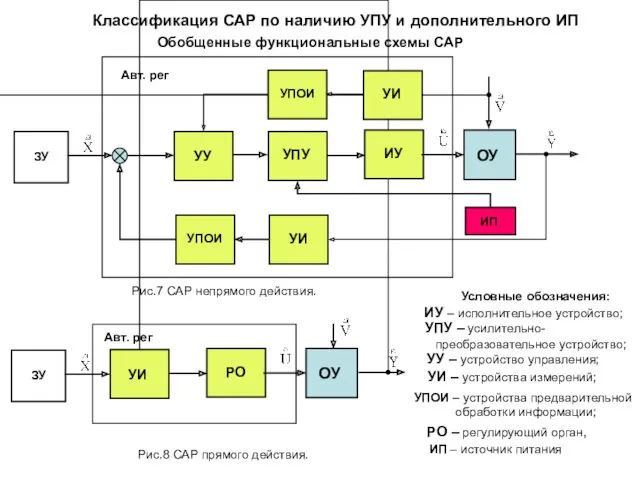
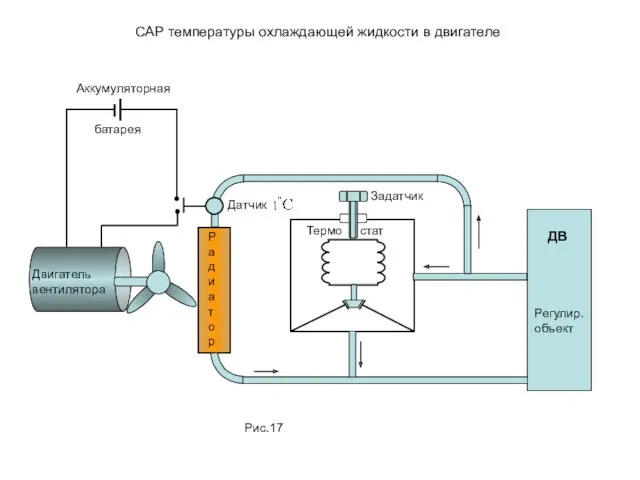
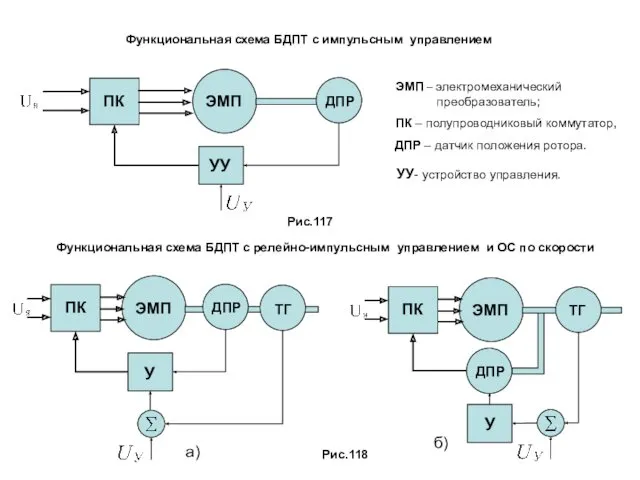
- 14. Функциональная схема САП
- 16. ФИЗИЧЕСКИЕ ПРИНЦИПЫ СОЗДАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН В основе создания электрических машин лежат законы электромагнитной индукции и электромагнитных
- 17. Процесc индуктирования ЭДС и электромагнитного момента в рамке Рис.28 Рис.27
- 19. Рис.31 Рис.32
- 20. Рис.33 Схема соединения секций петлевой обмотки якоря А А В
- 21. Рис. 34 Упрощенная схема обмотки якоря 1-секция обмотки якоря, 2- коллектор
- 22. Машины постоянного тока
- 23. Векторная диаграмма индуктируемых в обмотке якоря ЭДС при синусоидальных ЭДС в секциях Рис. 36
- 24. Схема четырехполюсной машины Рис.37
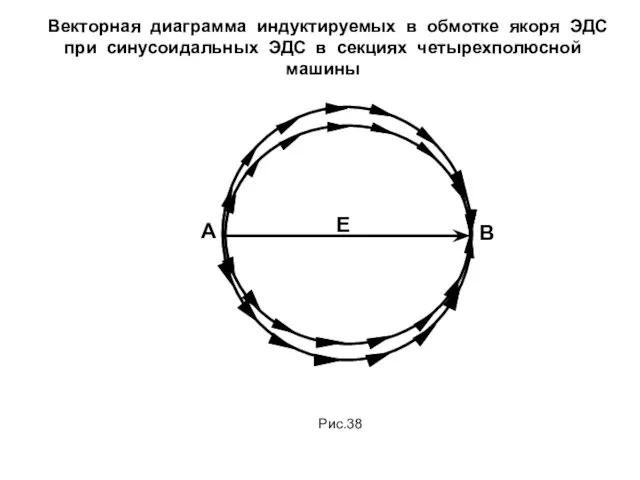
- 25. А В Векторная диаграмма индуктируемых в обмотке якоря ЭДС при синусоидальных ЭДС в секциях четырехполюсной машины
- 26. Главные полюсы машины 1 – полюсный наконечник; 2 – сердечник полюса; 3 – болт крепления полюса
- 27. Сердечник якоря машины постоянного тока 1 и 3 – шайбы обмоткодержателя; 2 – место установки бандажа;
- 28. Схема расположения секций двухслойной обмотки якоря четырехполюсной машины Рис.41
- 29. Коллектор машины постоянного тока 1- корпус, 2 – фланец, 3 – изолятор, 4 - коллекторные пластины,
- 30. Расположение секций якоря в пазах 1 – секции обмотки якоря, 2 – сердечник якоря, 3 –
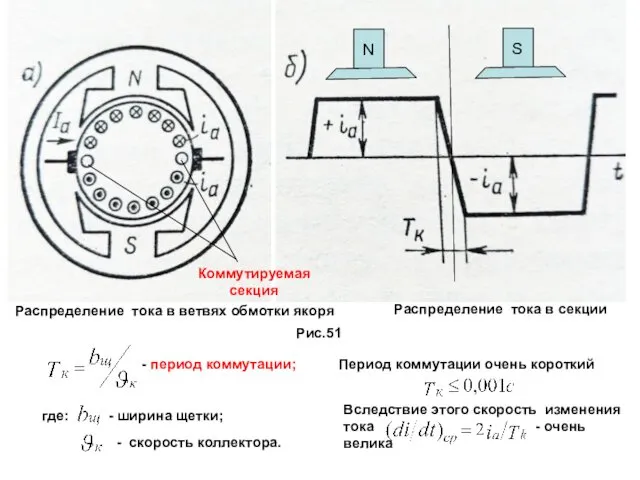
- 31. Устройство машины постоянного тока 1 – коллектор, 2 – щеточный узел, 3 – якорь , 4
- 32. Распределение создаваемой ОВ индукции вдоль окружности якоря и индуктируемых ЭДС в секции ОЯ (напряжений между коллекторными
- 33. Основные параметры электромашин Электромагнитный момент Рис.46 - число параллельных ветвей;
- 34. Рис. 47 Магнитные поля машины постоянного тока, создаваемые: а) – обмоткой возбуждения; б) – обмоткой якоря;
- 35. Магнитное поле реакции якоря действует по поперечной оси машины, поэтому его называют поперечным полем. Оно оказывает
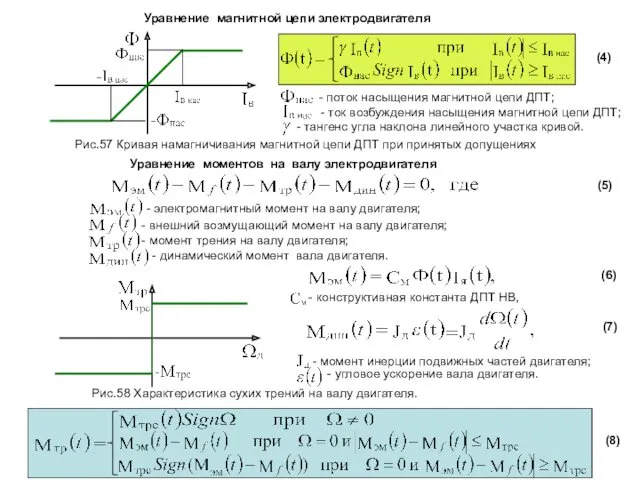
- 36. 2 - оказывает размагничивающее влияние на результирующий поток возбуждения машины. Из за нелинейного характера кривой намагничивания
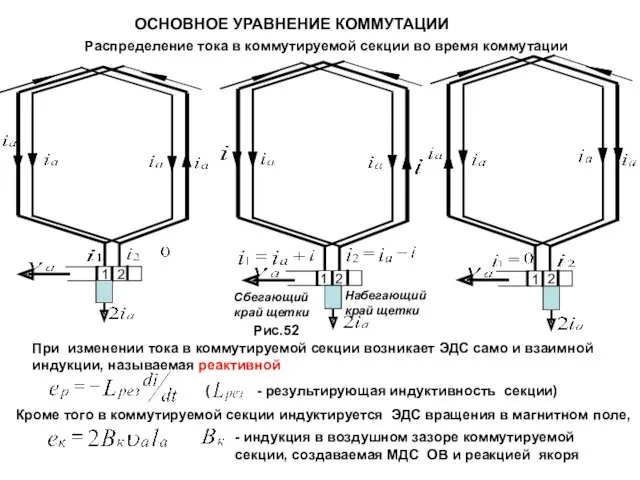
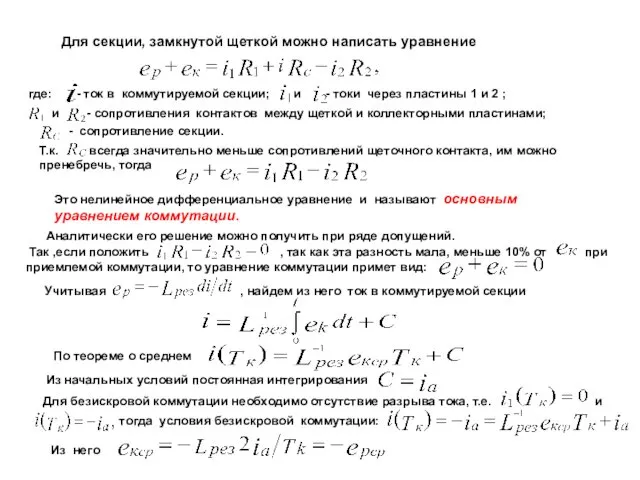
- 37. Коммутация
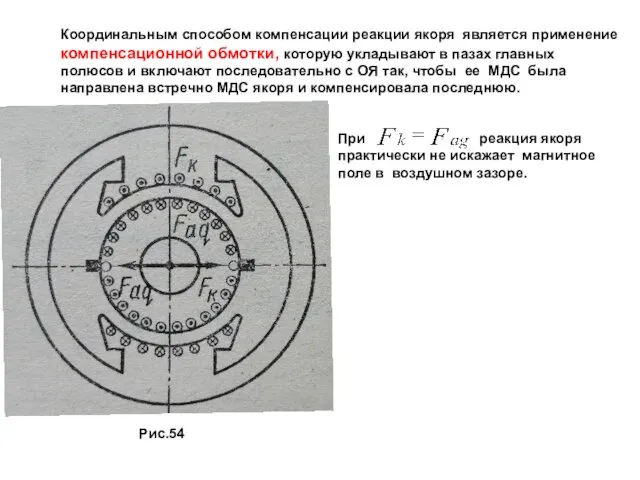
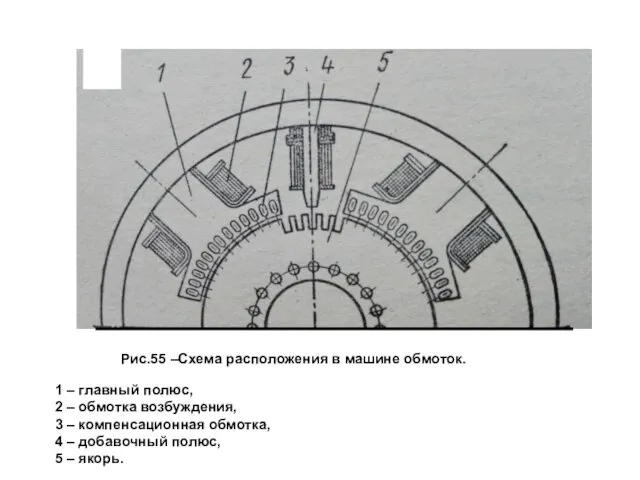
- 41. Их устанавливают между главными полюсами, а их обмотку включают последовательно с ОЯ. При этом магнитную цепь
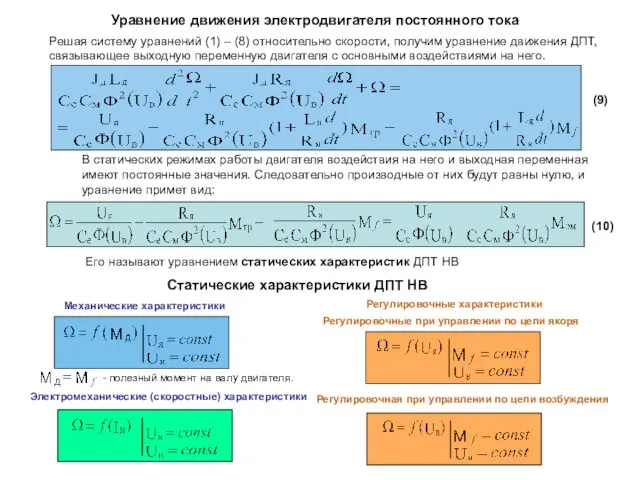
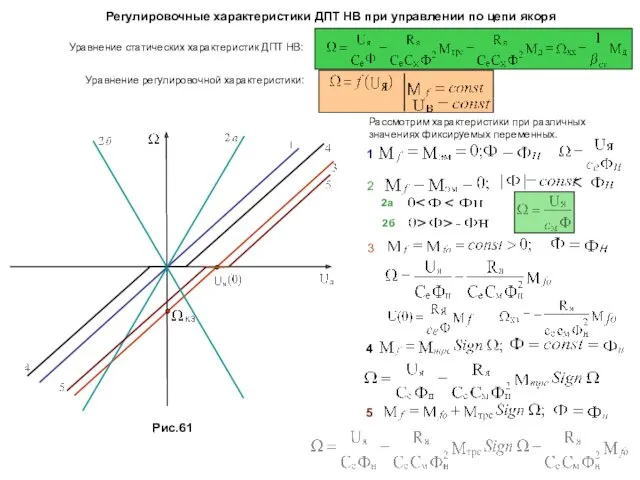
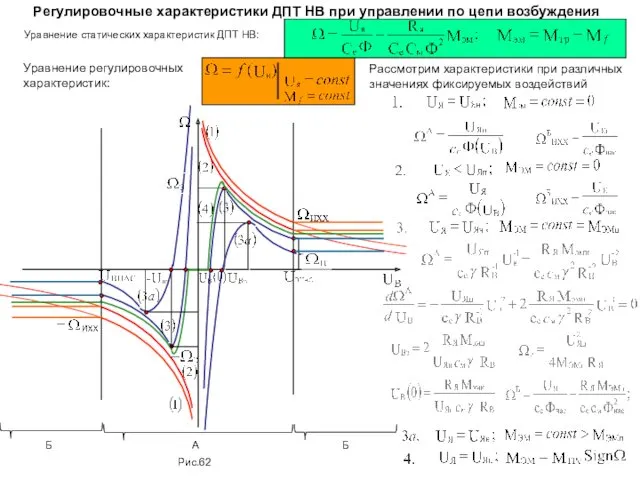
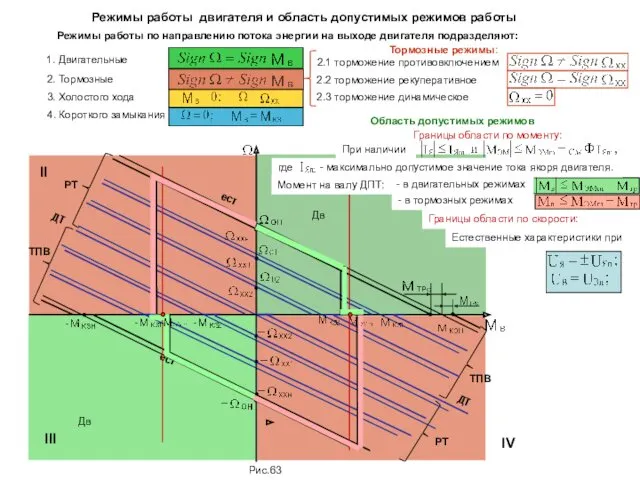
- 45. Уравнение движения электродвигателя постоянного тока
- 60. Нелинейная математическая модель ДПТ (при принятых ранее допущениях): ДИНАМИЧЕСКИЕ МОДЕЛИ И ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ ДПТ НВ
- 64. Линейная математическая модель двигателя
- 65. ЛИНЕАРИЗОВАННАЯ ДИНАМИЧЕСКАЯ МОДЕЛЬ ДПТ НВ в изображениях
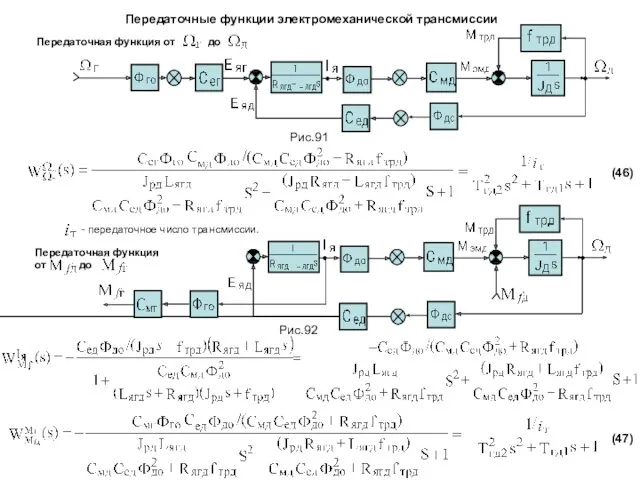
- 66. Передаточная функция ДПТ НВ при управлении по цепи якоря Рис.79 Преобразованная структурная схема (21)
- 67. Передаточная функция ДПТ НВ по возмущающему воздействию Рис.80 Преобразованная структурная схема
- 68. Передаточная функция ДПТ НВ при управлении по цепи возбуждения Рис. 81 Преобразованная структурная схема
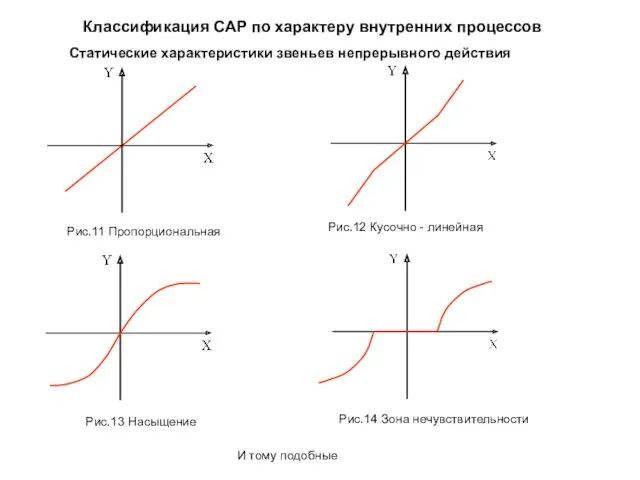
- 69. Динамические характеристики ДПТ НВ как пропорционального звена второго порядка Такие звенья, описываются уравнениями вида: В зависимости
- 70. Аналитическим выражением переходной характеристики звена второго порядка является решение дифференциального уравнения при Х(t)=1(t). Для звеньев с
- 71. Частотные характеристики звеньев второго порядка -40дб/дек Аналитическое выражение ЛАХ: Асимптотами ЛАХ являются: - модуль частотной передаточной
- 72. 1.3.2.Колебательные звенья Уравнение звеньев этого типа имеет тот же вид При таком сочетании параметров корни характеристического
- 73. Весовая функция колебательных звеньев Ее вид представлен на рис.54 Чем меньше , тем меньше затухание переходных
- 74. Аналитическое выражение ЛАХ: Асимптотами ЛАХ являются: -40дб/дек (42) (43) (44) Частотная передаточная функция звена имеет вид:
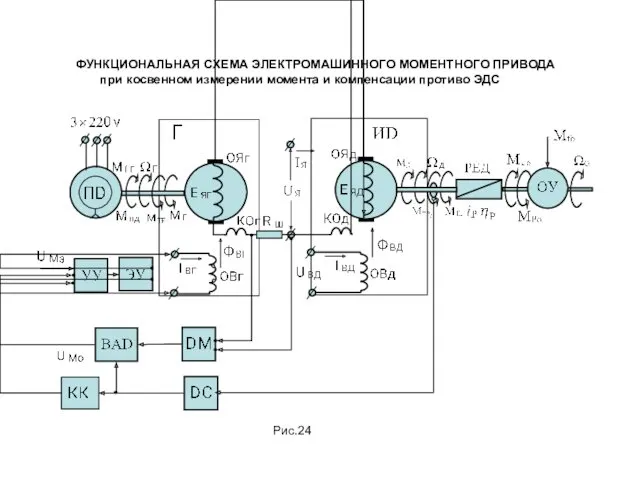
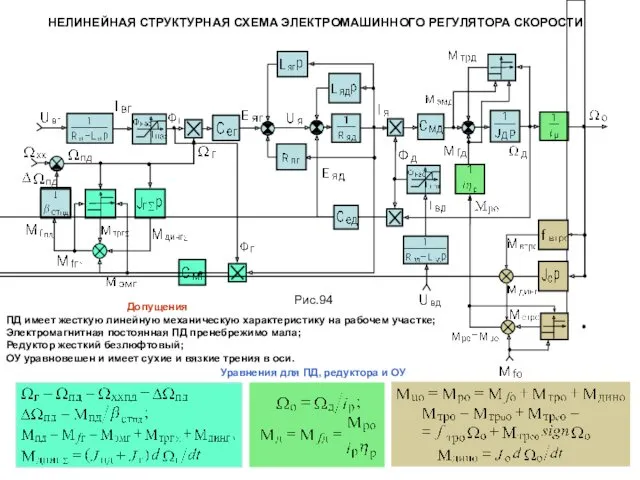
- 77. НЕЛИНЕЙНАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ Рис.89
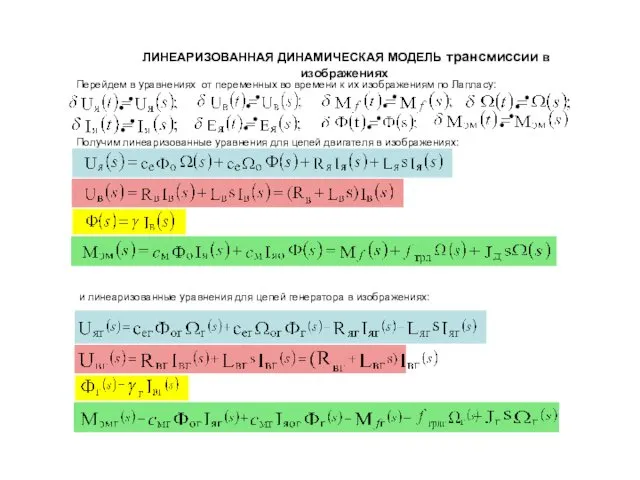
- 78. ЛИНЕАРИЗОВАННАЯ ДИНАМИЧЕСКАЯ МОДЕЛЬ трансмиссии в изображениях Перейдем в уравнениях от переменных во времени к их изображениям
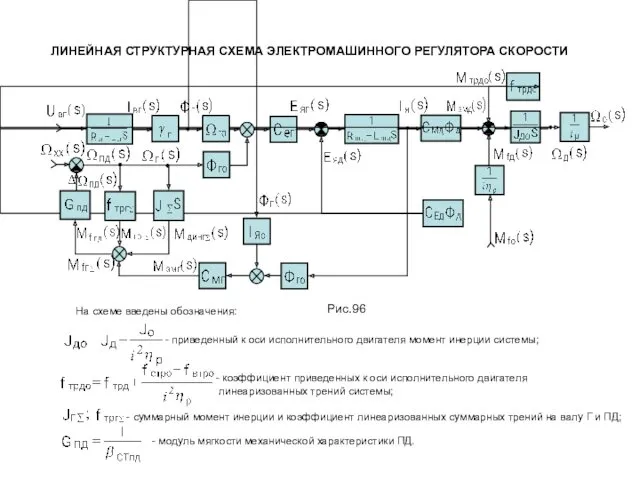
- 79. ЛИНЕАРИЗОВАННАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ
- 100. Скачать презентацию
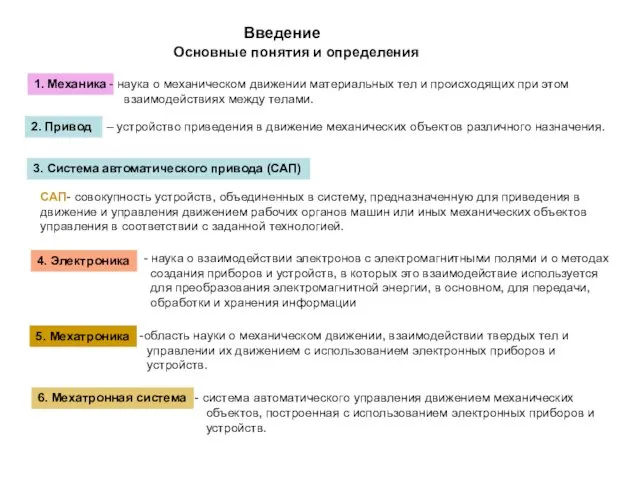
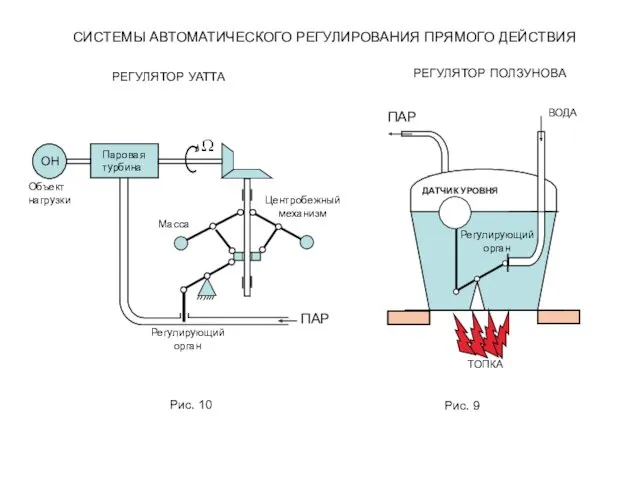
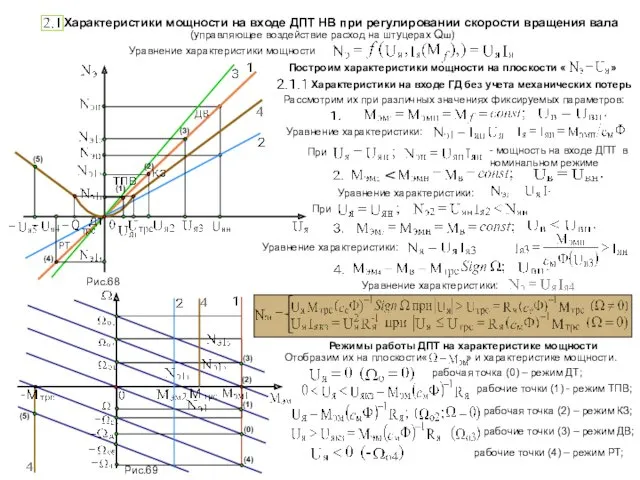
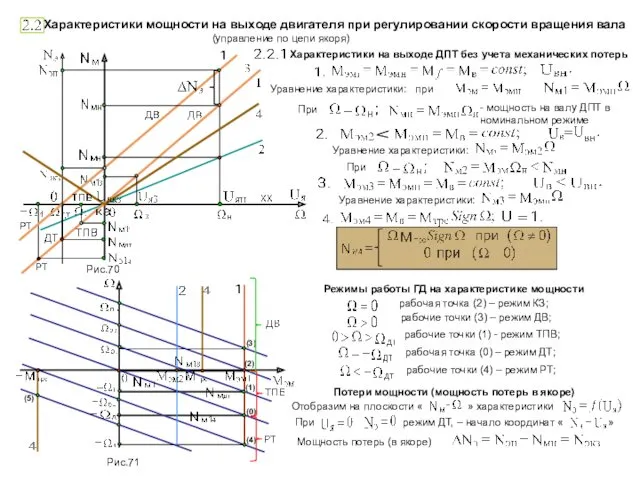
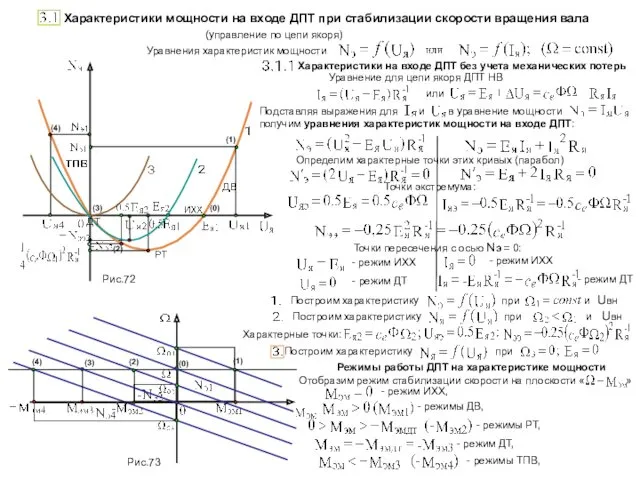
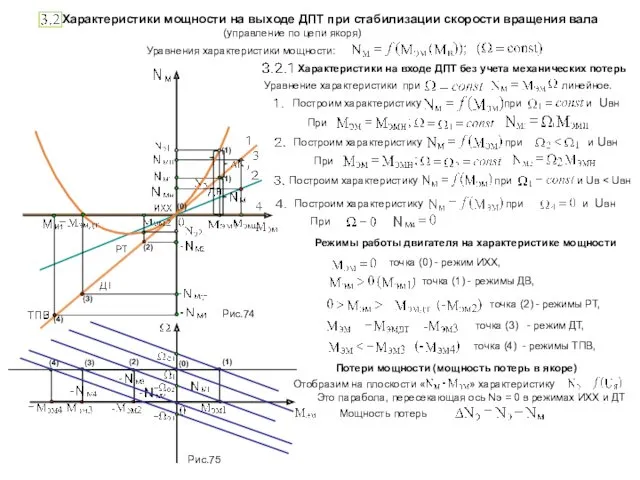
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРЯМОГО ДЕЙСТВИЯ
РЕГУЛЯТОР ПОЛЗУНОВА
РЕГУЛЯТОР УАТТА
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПРЯМОГО ДЕЙСТВИЯ
РЕГУЛЯТОР ПОЛЗУНОВА
РЕГУЛЯТОР УАТТА
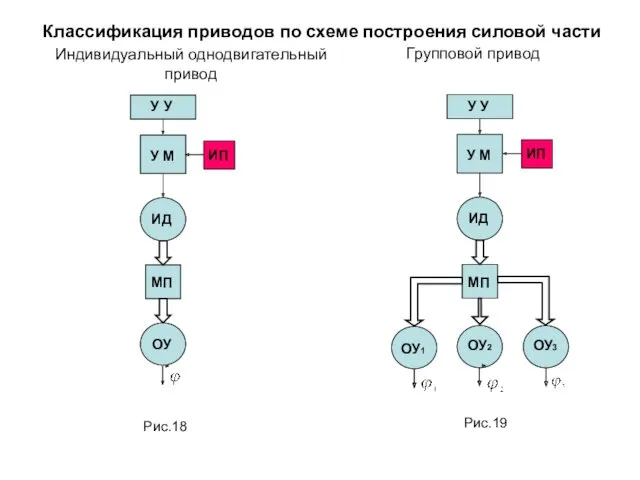
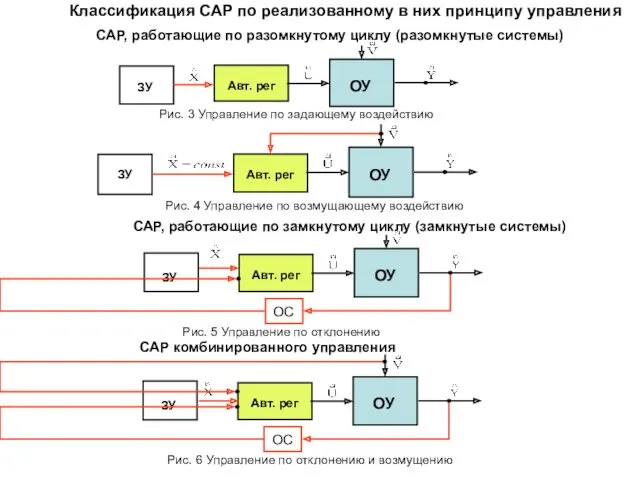
Классификация приводов по схеме построения силовой части
Классификация приводов по схеме построения силовой части
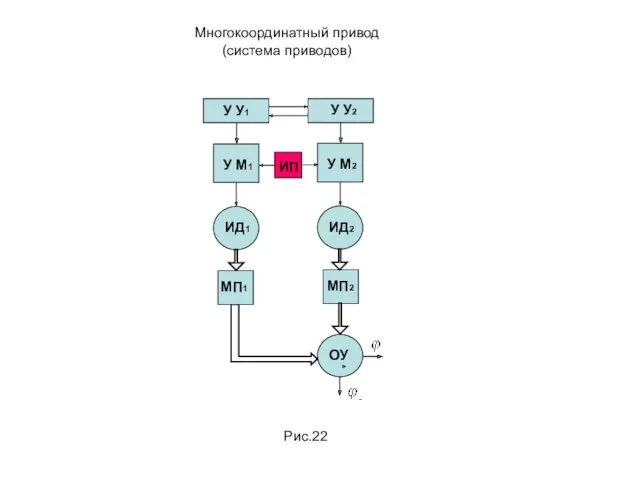
Многокоординатный привод (система приводов)
ИП
Рис.22
Многокоординатный привод (система приводов)
ИП
Рис.22
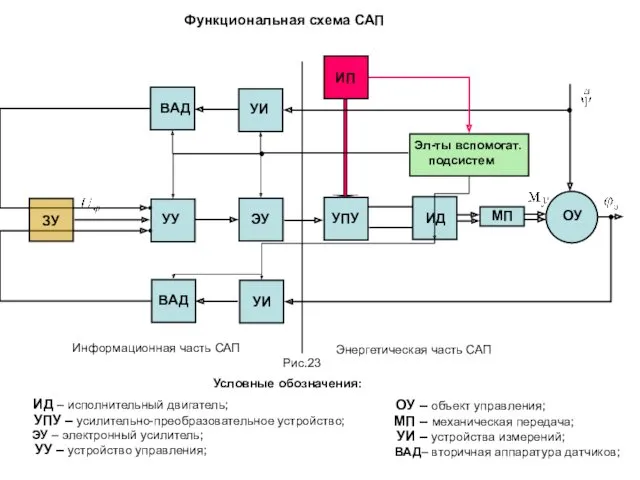
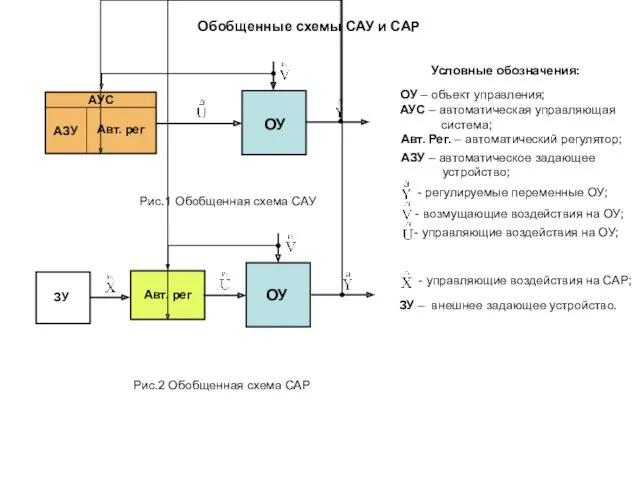
Функциональная схема САП
Функциональная схема САП
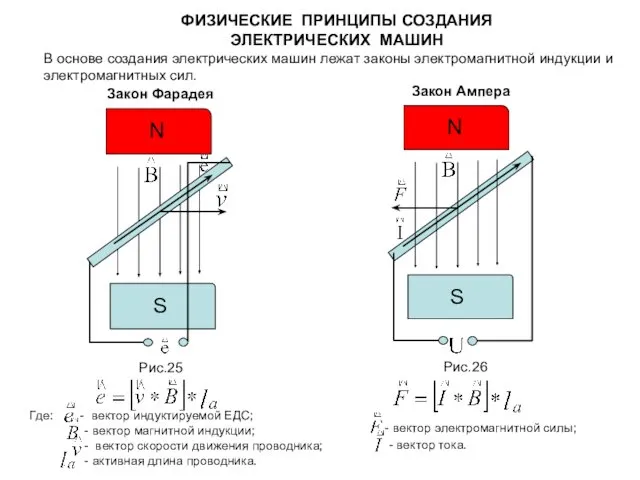
ФИЗИЧЕСКИЕ ПРИНЦИПЫ СОЗДАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН
В основе создания электрических машин лежат законы
ФИЗИЧЕСКИЕ ПРИНЦИПЫ СОЗДАНИЯ ЭЛЕКТРИЧЕСКИХ МАШИН
В основе создания электрических машин лежат законы
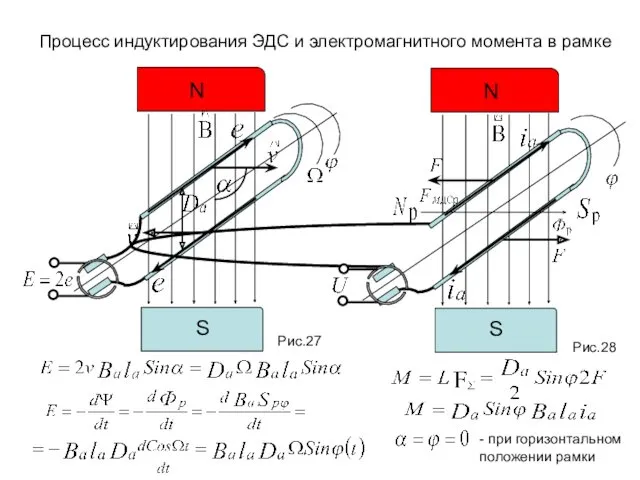
Процесc индуктирования ЭДС и электромагнитного момента в рамке
Рис.28
Рис.27
Процесc индуктирования ЭДС и электромагнитного момента в рамке
Рис.28
Рис.27

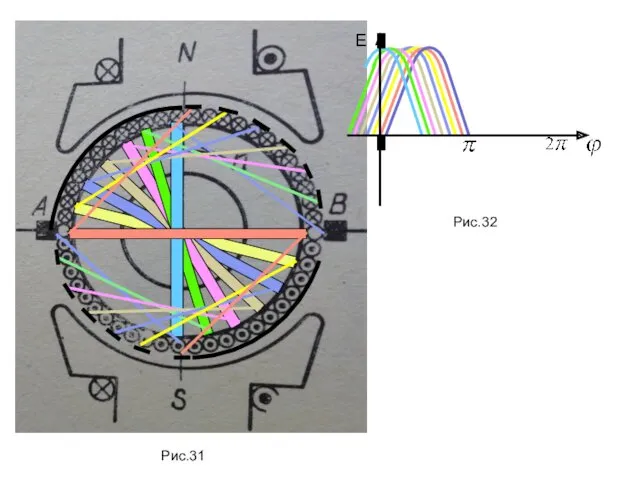
Рис.31
Рис.32
Рис.31
Рис.32
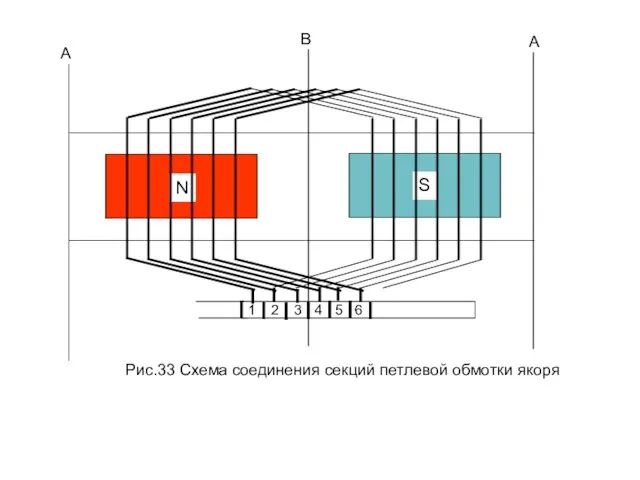
Рис.33 Схема соединения секций петлевой обмотки якоря
А
А
В
Рис.33 Схема соединения секций петлевой обмотки якоря
А
А
В
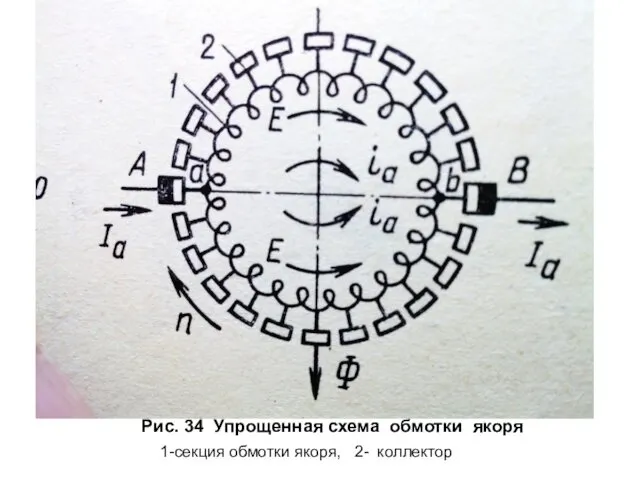
Рис. 34 Упрощенная схема обмотки якоря
1-секция обмотки якоря, 2- коллектор
Рис. 34 Упрощенная схема обмотки якоря
1-секция обмотки якоря, 2- коллектор

Машины постоянного тока
Машины постоянного тока
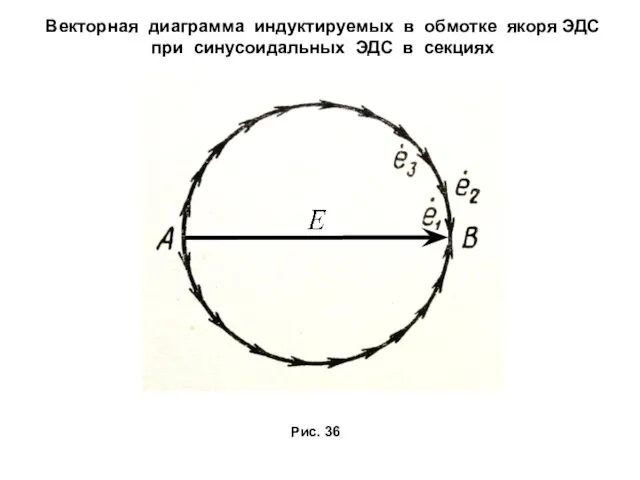
Векторная диаграмма индуктируемых в обмотке якоря ЭДС при синусоидальных ЭДС в
Векторная диаграмма индуктируемых в обмотке якоря ЭДС при синусоидальных ЭДС в
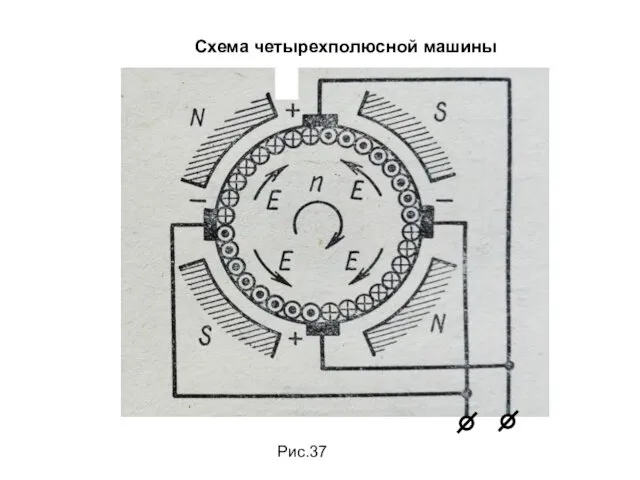
Схема четырехполюсной машины
Рис.37
Схема четырехполюсной машины
Рис.37
А
В
Векторная диаграмма индуктируемых в обмотке якоря ЭДС при синусоидальных ЭДС в
А
В
Векторная диаграмма индуктируемых в обмотке якоря ЭДС при синусоидальных ЭДС в
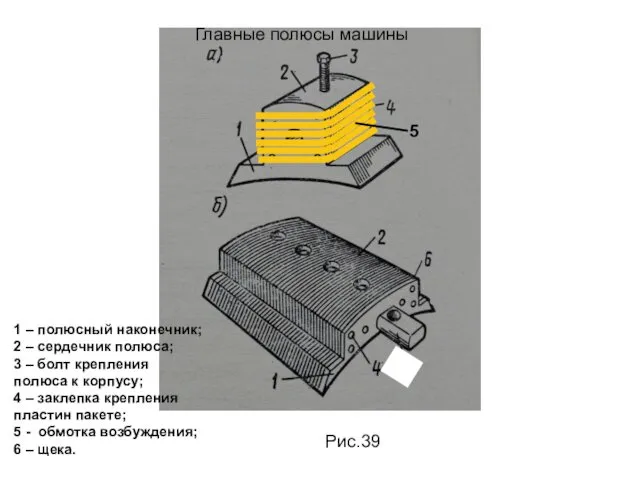
Главные полюсы машины
1 – полюсный наконечник; 2 – сердечник полюса;
3
Главные полюсы машины
1 – полюсный наконечник; 2 – сердечник полюса;
3
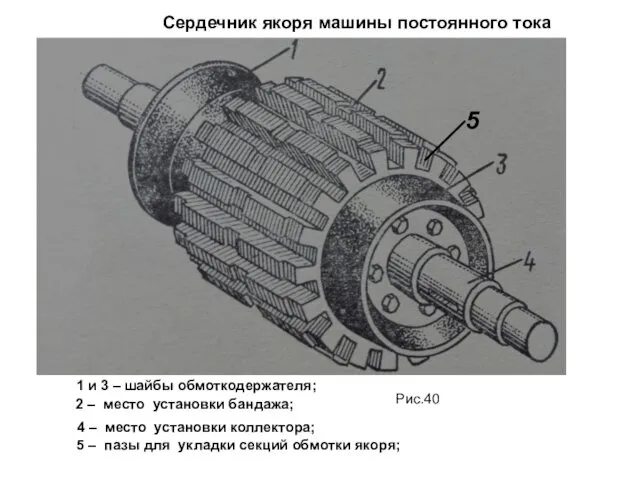
Сердечник якоря машины постоянного тока
1 и 3 – шайбы обмоткодержателя;
2
Сердечник якоря машины постоянного тока
1 и 3 – шайбы обмоткодержателя;
2

Схема расположения секций двухслойной обмотки якоря
четырехполюсной машины
Рис.41
Схема расположения секций двухслойной обмотки якоря
четырехполюсной машины
Рис.41
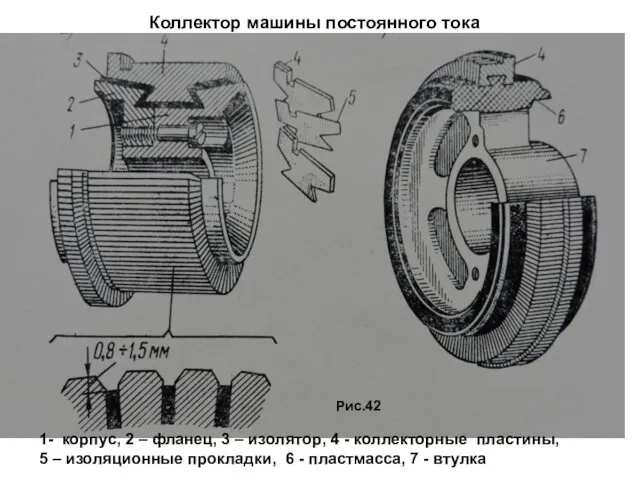
Коллектор машины постоянного тока
1- корпус, 2 – фланец, 3 –
Коллектор машины постоянного тока
1- корпус, 2 – фланец, 3 –

Расположение секций якоря в пазах
1 – секции обмотки якоря,
2 –
Расположение секций якоря в пазах
1 – секции обмотки якоря,
2 –
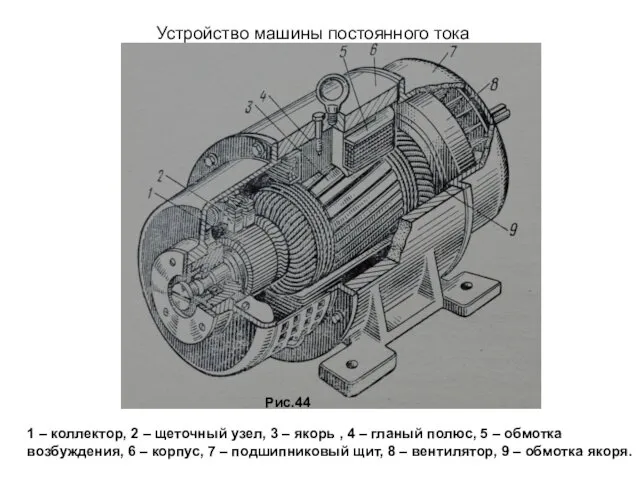
Устройство машины постоянного тока
1 – коллектор, 2 – щеточный узел, 3
Устройство машины постоянного тока
1 – коллектор, 2 – щеточный узел, 3
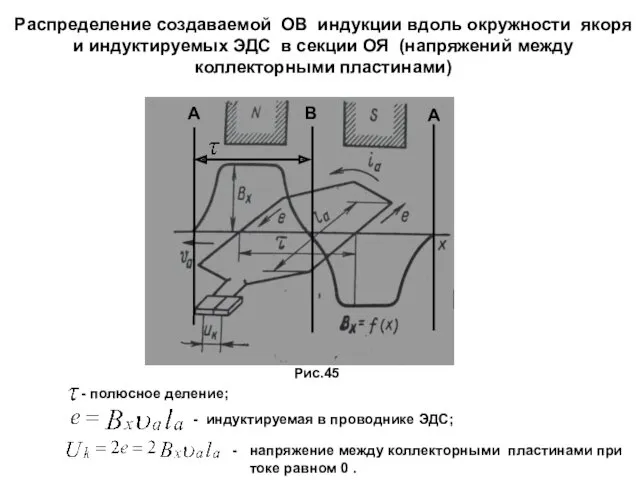
Распределение создаваемой ОВ индукции вдоль окружности якоря и индуктируемых ЭДС в
Распределение создаваемой ОВ индукции вдоль окружности якоря и индуктируемых ЭДС в

Основные параметры электромашин
Электромагнитный момент
Рис.46
- число параллельных ветвей;
Основные параметры электромашин
Электромагнитный момент
Рис.46
- число параллельных ветвей;
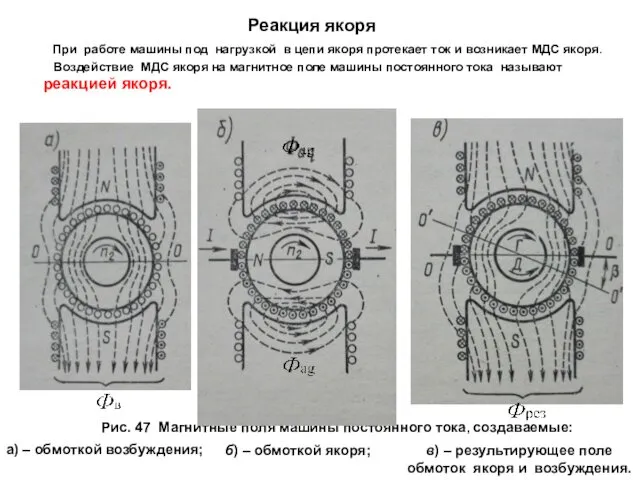
Рис. 47 Магнитные поля машины постоянного тока, создаваемые:
а) – обмоткой возбуждения;
б)
Рис. 47 Магнитные поля машины постоянного тока, создаваемые:
а) – обмоткой возбуждения;
б)
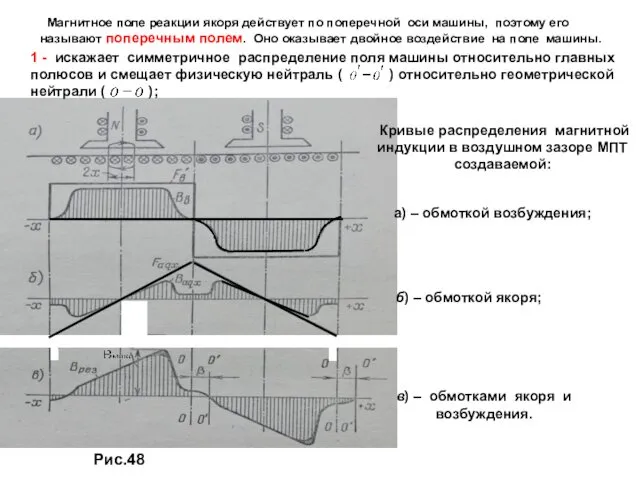
Магнитное поле реакции якоря действует по поперечной оси машины, поэтому
Магнитное поле реакции якоря действует по поперечной оси машины, поэтому
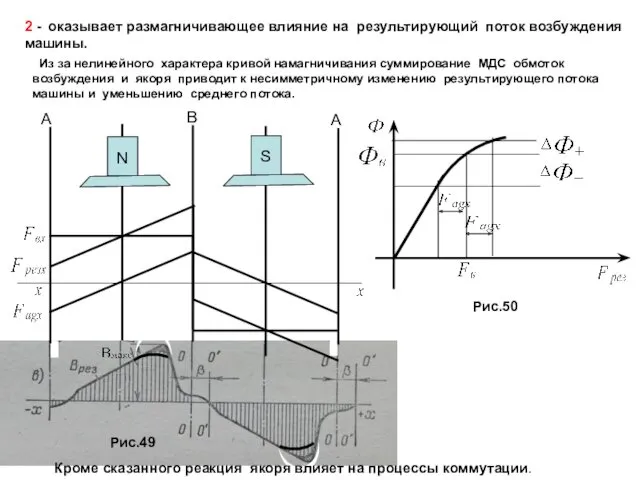
2 - оказывает размагничивающее влияние на результирующий поток возбуждения машины.
2 - оказывает размагничивающее влияние на результирующий поток возбуждения машины.
Коммутация
Коммутация
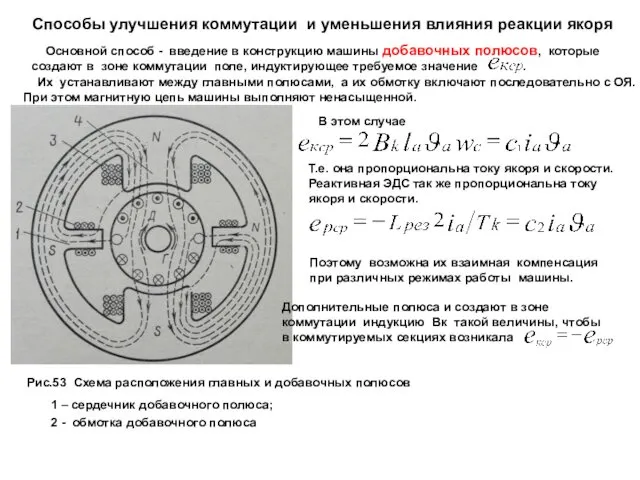
Их устанавливают между главными полюсами, а их обмотку включают последовательно
Их устанавливают между главными полюсами, а их обмотку включают последовательно
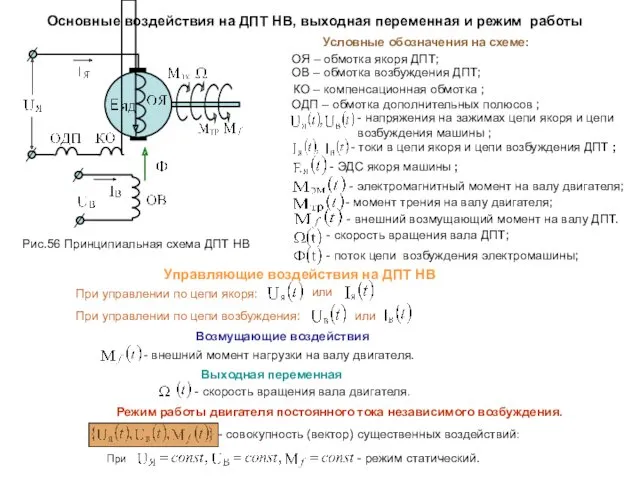
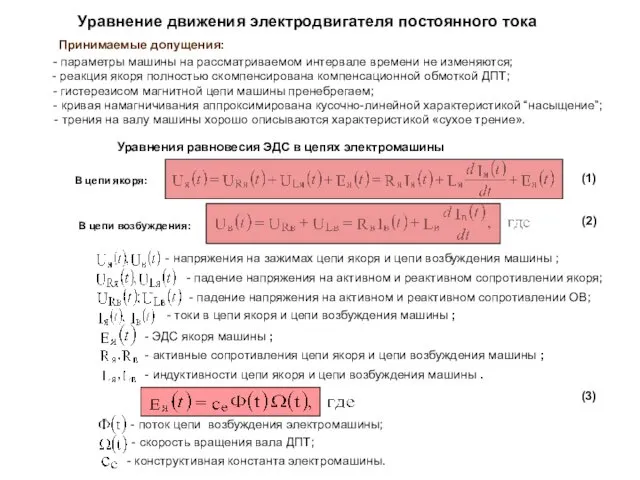
Уравнение движения электродвигателя постоянного тока
Уравнение движения электродвигателя постоянного тока

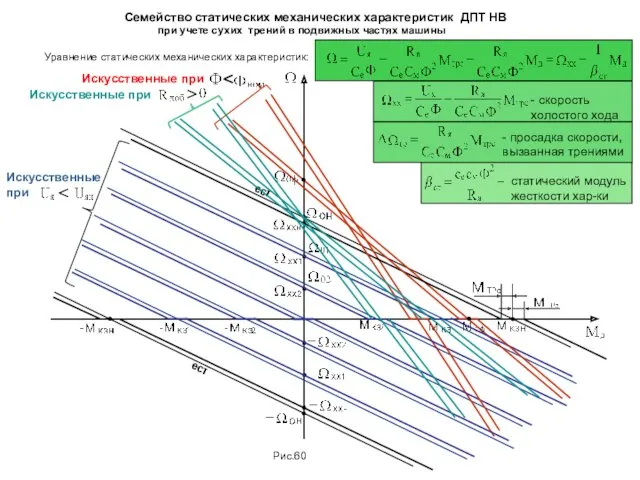
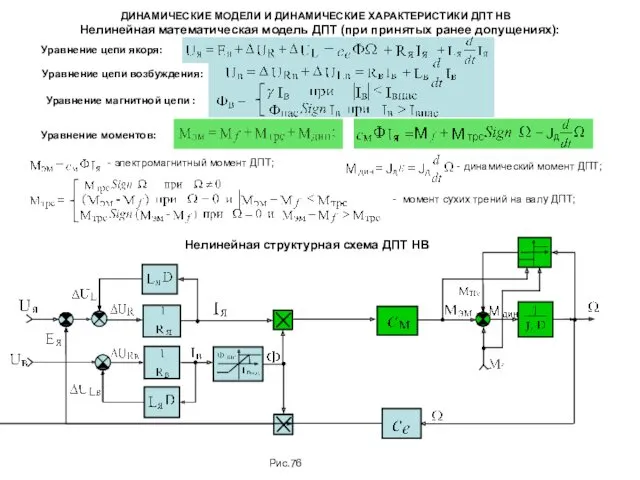
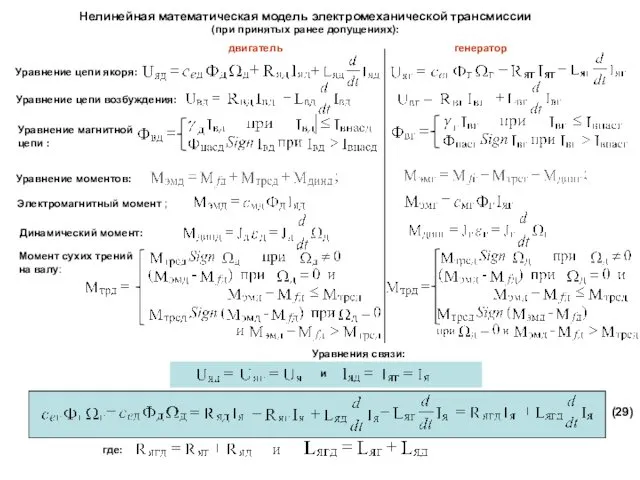
Нелинейная математическая модель ДПТ (при принятых ранее допущениях):
ДИНАМИЧЕСКИЕ МОДЕЛИ И ДИНАМИЧЕСКИЕ
Нелинейная математическая модель ДПТ (при принятых ранее допущениях):
ДИНАМИЧЕСКИЕ МОДЕЛИ И ДИНАМИЧЕСКИЕ
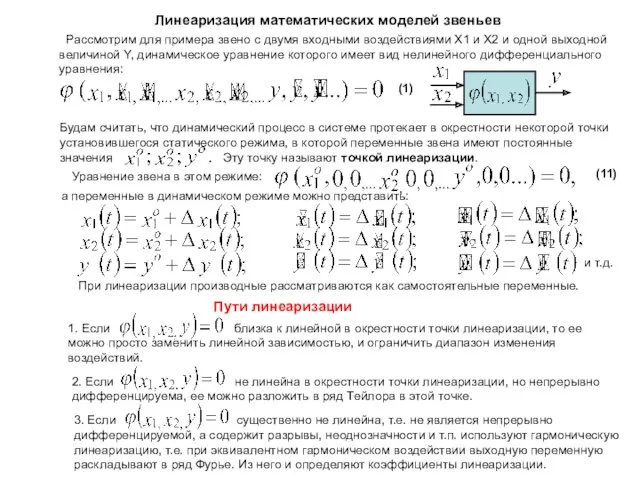
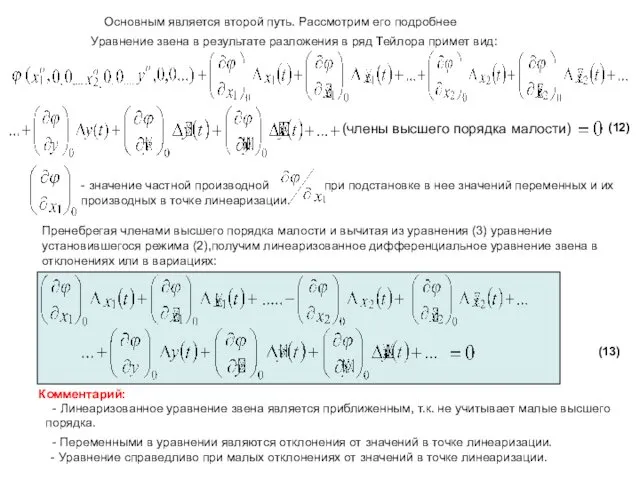
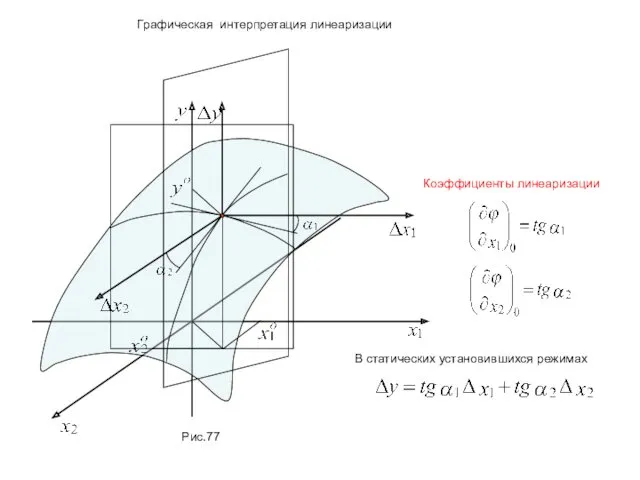
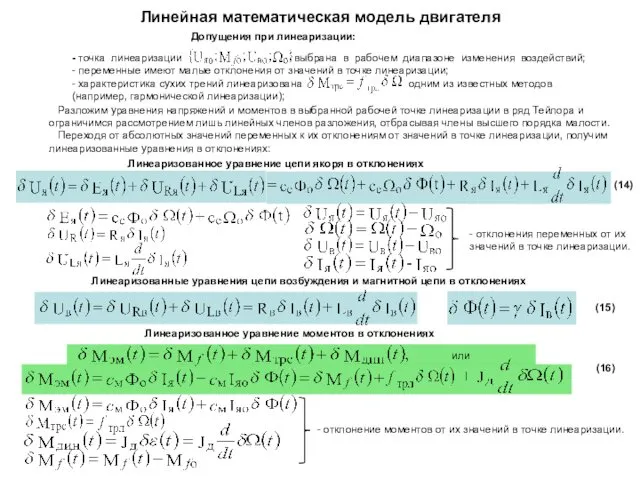
Линейная математическая модель двигателя
Линейная математическая модель двигателя
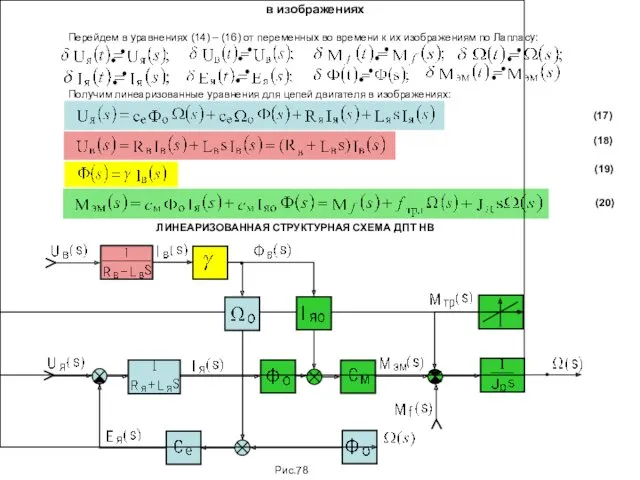
ЛИНЕАРИЗОВАННАЯ ДИНАМИЧЕСКАЯ МОДЕЛЬ ДПТ НВ в изображениях
ЛИНЕАРИЗОВАННАЯ ДИНАМИЧЕСКАЯ МОДЕЛЬ ДПТ НВ в изображениях
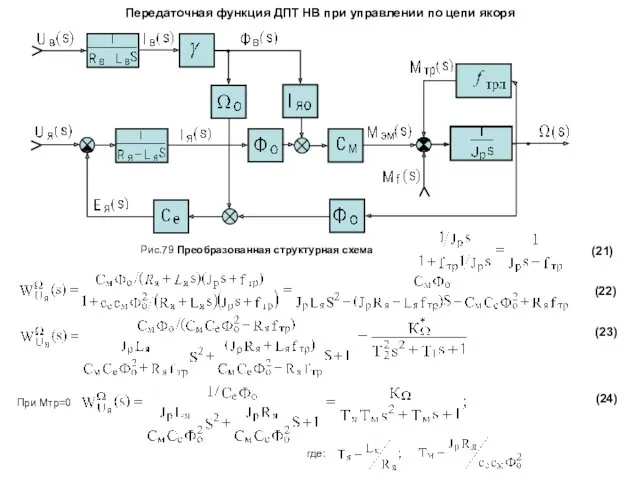
Передаточная функция ДПТ НВ при управлении по цепи якоря
Рис.79
Передаточная функция ДПТ НВ при управлении по цепи якоря
Рис.79
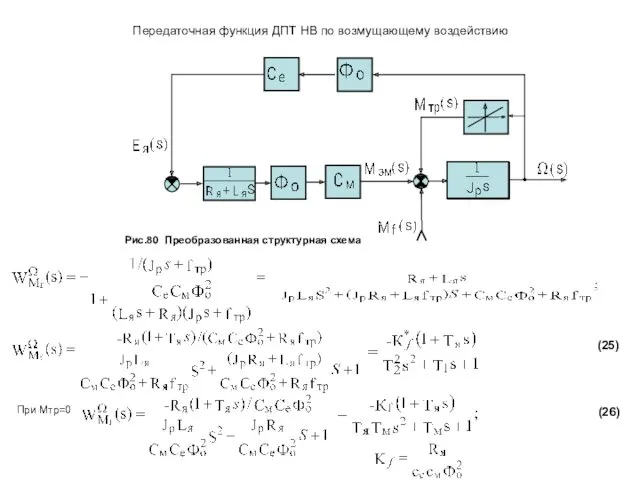
Передаточная функция ДПТ НВ по возмущающему воздействию
Рис.80 Преобразованная структурная схема
Передаточная функция ДПТ НВ по возмущающему воздействию
Рис.80 Преобразованная структурная схема
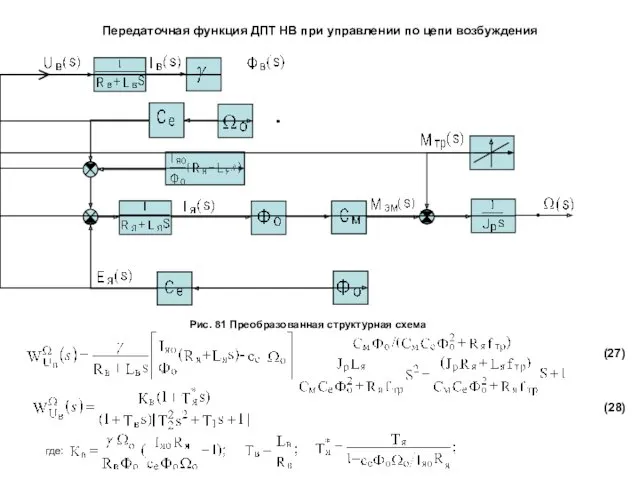
Передаточная функция ДПТ НВ при управлении по цепи возбуждения
Рис. 81
Передаточная функция ДПТ НВ при управлении по цепи возбуждения
Рис. 81
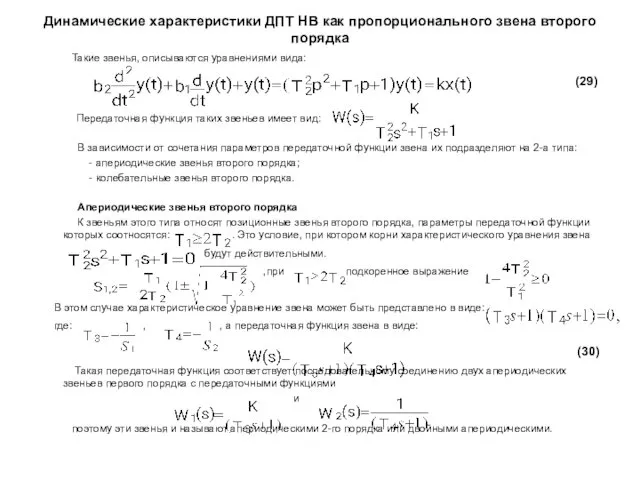
Динамические характеристики ДПТ НВ как пропорционального звена второго порядка
Такие звенья,
Динамические характеристики ДПТ НВ как пропорционального звена второго порядка
Такие звенья,
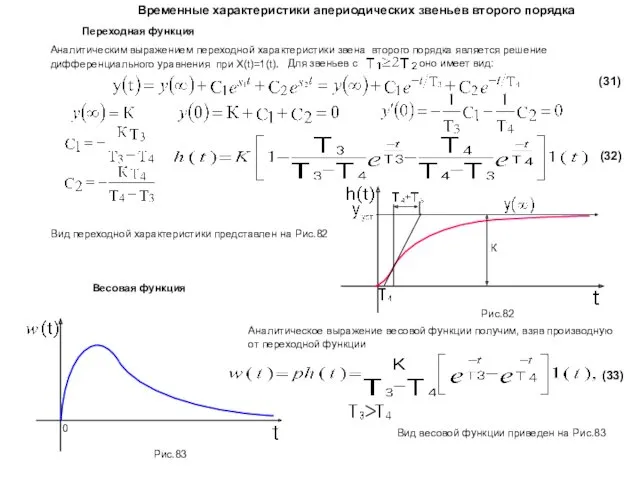
Аналитическим выражением переходной характеристики звена второго порядка является решение дифференциального уравнения
Аналитическим выражением переходной характеристики звена второго порядка является решение дифференциального уравнения
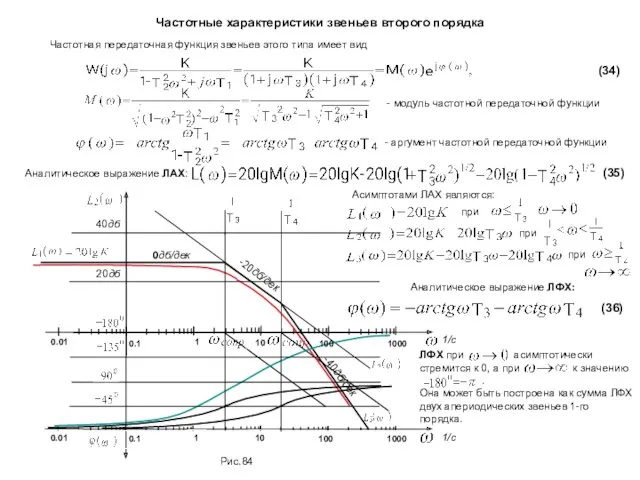
Частотные характеристики звеньев второго порядка
-40дб/дек
Аналитическое выражение ЛАХ:
Асимптотами ЛАХ являются:
- модуль частотной
Частотные характеристики звеньев второго порядка
-40дб/дек
Аналитическое выражение ЛАХ:
Асимптотами ЛАХ являются:
- модуль частотной

1.3.2.Колебательные звенья
Уравнение звеньев этого типа имеет тот же вид
При таком сочетании
1.3.2.Колебательные звенья
Уравнение звеньев этого типа имеет тот же вид
При таком сочетании
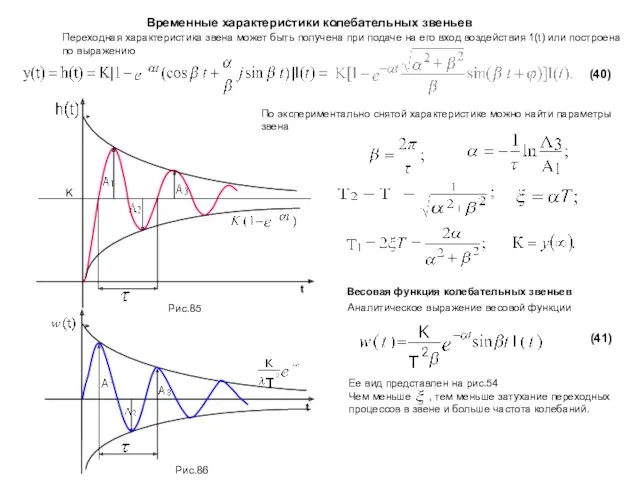
Весовая функция колебательных звеньев
Ее вид представлен на рис.54
Чем меньше , тем
Весовая функция колебательных звеньев
Ее вид представлен на рис.54
Чем меньше , тем
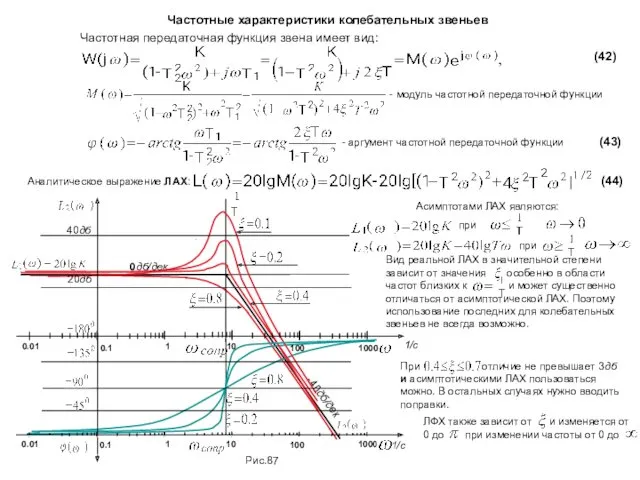
Аналитическое выражение ЛАХ:
Асимптотами ЛАХ являются:
-40дб/дек
(42)
(43)
(44)
Частотная передаточная функция звена имеет вид:
- модуль
Аналитическое выражение ЛАХ:
Асимптотами ЛАХ являются:
-40дб/дек
(42)
(43)
(44)
Частотная передаточная функция звена имеет вид:
- модуль
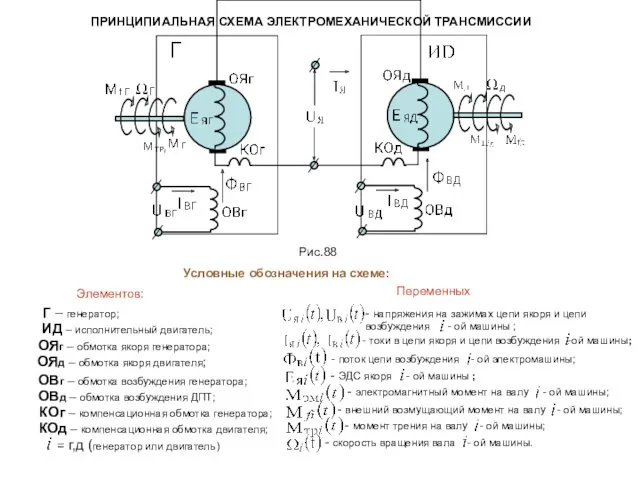
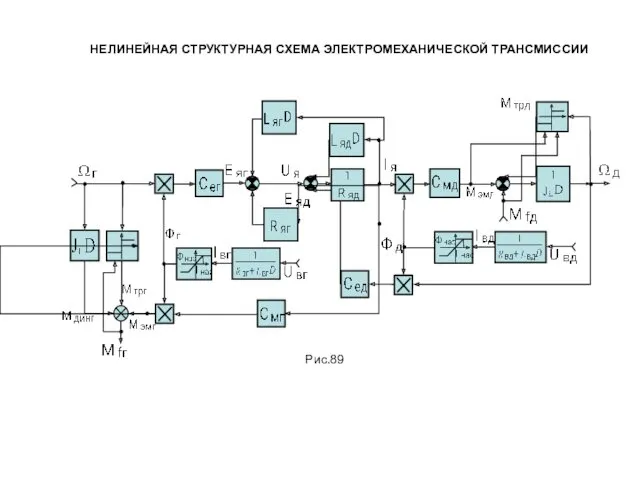
НЕЛИНЕЙНАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ
Рис.89
НЕЛИНЕЙНАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ
Рис.89
ЛИНЕАРИЗОВАННАЯ ДИНАМИЧЕСКАЯ МОДЕЛЬ трансмиссии в изображениях
Перейдем в уравнениях от переменных во
ЛИНЕАРИЗОВАННАЯ ДИНАМИЧЕСКАЯ МОДЕЛЬ трансмиссии в изображениях
Перейдем в уравнениях от переменных во
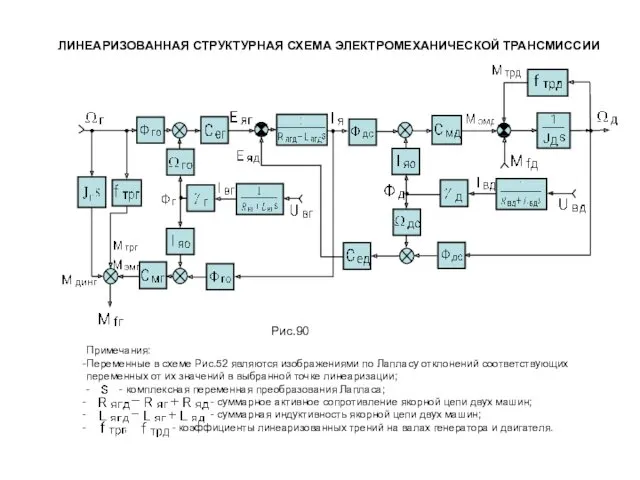
ЛИНЕАРИЗОВАННАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ
ЛИНЕАРИЗОВАННАЯ СТРУКТУРНАЯ СХЕМА ЭЛЕКТРОМЕХАНИЧЕСКОЙ ТРАНСМИССИИ



 Правовые основы обеспечения единства измерений
Правовые основы обеспечения единства измерений Развлечение для детей В гостях у сказки Диск
Развлечение для детей В гостях у сказки Диск ПС_Белоусова Н.Н
ПС_Белоусова Н.Н История изобретения телефона
История изобретения телефона GPS и все такое прочее
GPS и все такое прочее Родительское собрание. Тема: Воспитание сознательной дисциплины. Родительское собрание. Разработка на тему Воспитание сознательной дисциплиныПрезентация к родительскому собранию Воспитание сознательной дисциплины
Родительское собрание. Тема: Воспитание сознательной дисциплины. Родительское собрание. Разработка на тему Воспитание сознательной дисциплиныПрезентация к родительскому собранию Воспитание сознательной дисциплины Знакомство с компьютером. (Занятие 1)
Знакомство с компьютером. (Занятие 1) Внеклассное мероприятие Спор трех королев
Внеклассное мероприятие Спор трех королев Газлифтный способ эксплуатации нефтяных скважин, оборудование газлифтных скважин
Газлифтный способ эксплуатации нефтяных скважин, оборудование газлифтных скважин Изготовление и рециклинг пластин арсенида галлия GaAs
Изготовление и рециклинг пластин арсенида галлия GaAs Классификация внешнеторговых операций (тест)
Классификация внешнеторговых операций (тест) Компенсирленген және декомпенсирленген жүрек ақауларының түрлері және морфологиялық мінездемесі. Балалардағы ерекшеліктері
Компенсирленген және декомпенсирленген жүрек ақауларының түрлері және морфологиялық мінездемесі. Балалардағы ерекшеліктері Кнопка и светодиоды. Занятие №2
Кнопка и светодиоды. Занятие №2 Содержание воспитания и социализации учащихся начальной школы
Содержание воспитания и социализации учащихся начальной школы Порядок производства работ на перегоне
Порядок производства работ на перегоне Сервисный тренинг EXD06 Ассистент смены полосы движения (Side Scan Assist)
Сервисный тренинг EXD06 Ассистент смены полосы движения (Side Scan Assist) Производство продуктов из свиного шпика мощьностью 300 кг готового продукта в смену
Производство продуктов из свиного шпика мощьностью 300 кг готового продукта в смену Числовое программное управление для автоматизированного оборудования
Числовое программное управление для автоматизированного оборудования Соглашение о сотрудничестве между Ямало-Ненецким округом и Гамбургом при реализации поставок оленины и рыбной продукции
Соглашение о сотрудничестве между Ямало-Ненецким округом и Гамбургом при реализации поставок оленины и рыбной продукции Сборочные работы при различных видах соединений
Сборочные работы при различных видах соединений Роль капитала в развитии инновационного потенциала Нижегородской области
Роль капитала в развитии инновационного потенциала Нижегородской области Анемии у детей-4
Анемии у детей-4 Укладка больших форматов и плоскостность
Укладка больших форматов и плоскостность Приборное оборудование вертолета (урок 14)
Приборное оборудование вертолета (урок 14) Свойства числовых неравенств
Свойства числовых неравенств Картография. ГИС в картографии
Картография. ГИС в картографии День пам'яті Герої Крут
День пам'яті Герої Крут Кисты челюстно-лицевой областей у детей. Одонтогенные воспалительные кисты челюстей от временных зубов у детей
Кисты челюстно-лицевой областей у детей. Одонтогенные воспалительные кисты челюстей от временных зубов у детей