- Электроника и микропроцессоры. Модуль 2,

Содержание
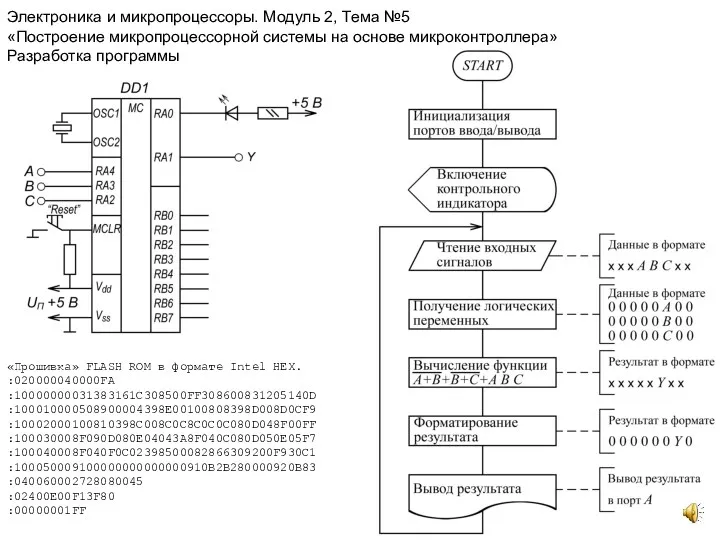
- 2. Электроника и микропроцессоры. Модуль 2, Тема №5 «Построение микропроцессорной системы на основе микроконтроллера» Разработка программы «Прошивка»
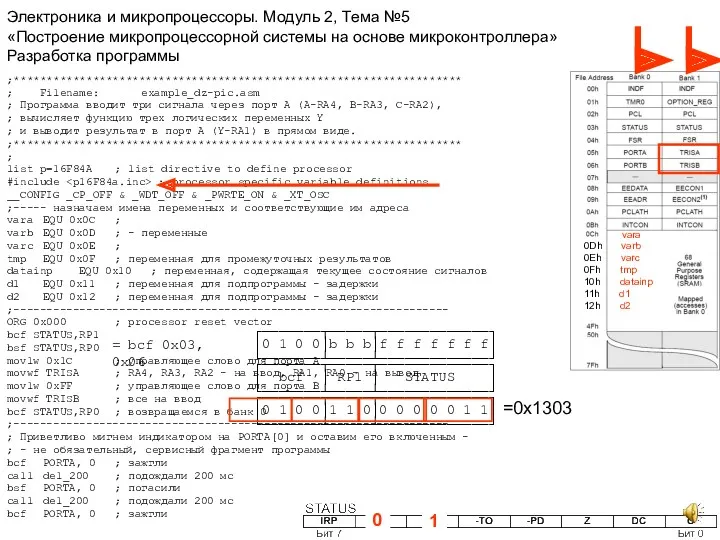
- 3. Электроника и микропроцессоры. Модуль 2, Тема №5 «Построение микропроцессорной системы на основе микроконтроллера» Разработка программы ;********************************************************************
- 4. ; --------------- Основной исполнительный цикл ----------------------- ; получаем комбинацию переменных и раскладываем их по разным регистрам
- 6. Скачать презентацию
Электроника и микропроцессоры. Модуль 2, Тема №5
«Построение микропроцессорной системы на основе
Электроника и микропроцессоры. Модуль 2, Тема №5 «Построение микропроцессорной системы на основе
Электроника и микропроцессоры. Модуль 2, Тема №5
«Построение микропроцессорной системы на основе
Электроника и микропроцессоры. Модуль 2, Тема №5 «Построение микропроцессорной системы на основе
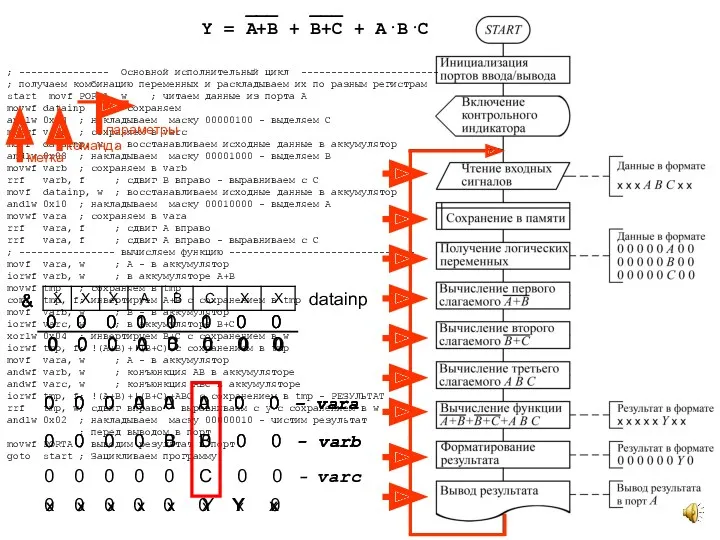
; --------------- Основной исполнительный цикл -----------------------
; получаем комбинацию переменных и раскладываем
; --------------- Основной исполнительный цикл -----------------------
; получаем комбинацию переменных и раскладываем
 Топография среднего мозга
Топография среднего мозга Порядок назначения и производство таможенных экспертиз Республики Беларусь
Порядок назначения и производство таможенных экспертиз Республики Беларусь Программа воспитания школьников Я, ты, он, она – вместе дружная семья
Программа воспитания школьников Я, ты, он, она – вместе дружная семья Веселые нотки Игра
Веселые нотки Игра Царство Грибы
Царство Грибы Чингиз Айтматов Буранный полустанок, IV глава Легенда О Манкурте
Чингиз Айтматов Буранный полустанок, IV глава Легенда О Манкурте Родительское собрание- знакомство с новым 3 классом.
Родительское собрание- знакомство с новым 3 классом. Краевой инженерный хакатон COPTERhack
Краевой инженерный хакатон COPTERhack Строительная акустика
Строительная акустика Теории происхождения языка
Теории происхождения языка Презентация Здоровьесберегающие технологии в логопедической практике Мастер-класс Здоровьесберегающие технологии в логопедической практике
Презентация Здоровьесберегающие технологии в логопедической практике Мастер-класс Здоровьесберегающие технологии в логопедической практике Анализ работы инфракрасных датчиков движения
Анализ работы инфракрасных датчиков движения Мать Мария (Скобцова)
Мать Мария (Скобцова) Повесть о разорении Рязани Батыем
Повесть о разорении Рязани Батыем Философия Новейшего времени и современности
Философия Новейшего времени и современности Самоанализ внеклассного мероприятия Моя любимая семья
Самоанализ внеклассного мероприятия Моя любимая семья Введение курса ОРКСЭ
Введение курса ОРКСЭ Вешняки. Восточный административный округ города Москвы
Вешняки. Восточный административный округ города Москвы Классификация сплавов. Диаграммы состояния сплавов
Классификация сплавов. Диаграммы состояния сплавов Логопедическое занятие с группой учащихся 3 класса VIII вида с сложной формой дисграфии по теме Слова-признаки.
Логопедическое занятие с группой учащихся 3 класса VIII вида с сложной формой дисграфии по теме Слова-признаки. Оптоволоконный станок для лазерной резки труб серии LW - SP с излучателем IPG
Оптоволоконный станок для лазерной резки труб серии LW - SP с излучателем IPG Как и где зимуют птицы (1 класс)
Как и где зимуют птицы (1 класс) Познавательная викторина
Познавательная викторина Понятие о специальных сталях и сплавах, эффективность их применения
Понятие о специальных сталях и сплавах, эффективность их применения ЛОГОПРОЕКТ Овощи - наши друзья
ЛОГОПРОЕКТ Овощи - наши друзья Флюидопроявления (газонефтеводопроявления). Лекция 3
Флюидопроявления (газонефтеводопроявления). Лекция 3 Проект индивидуального жилого дома
Проект индивидуального жилого дома Гендерный подход в организации развивающей среды в группах
Гендерный подход в организации развивающей среды в группах