- Элементы автоматики. Лекция 1

Содержание
- 2. 1. Общие параметры элементов автоматики
- 3. Системы автоматики состоят из ряда связанных между собой элементов, выполняющих определенные функции и обеспечивающих в комплексе
- 4. 1. измерительную, представляющую собой различного типа датчики, информирующие о достижении определенного значения контролируемого параметра; 2.преобразовательную, служащую
- 5. Все элементы любой группы имеют вход и выход. На вход поступает информация, форма которой преобразуется в
- 6. Выходной величиной может быть электрический сигнал, отличающийся по величине и характеру. Входную величину обычно называют входным
- 7. К основным, получившим наибольшее распространение, элементам автоматики следует отнести в первую очередь: 1.датчики, 2.усилители, 3.стабилизаторы, 4.реле,
- 8. 1.Датчиком называется устройство, преобразующее контролируемую или управляемую величину в выходной сигнал, удобный для передачи и дальнейшей
- 9. 2.Усилитель — это устройство, которое, не изменяя физической природы входного сигнала, производит лишь усиление, то есть
- 10. 3.Стабилизатором называется устройство, которое автоматически поддерживает постоянным значение выходной величины у независимо от изменений в определенных
- 11. 4.Реле представляет собой устройство, в котором при достижении определенного значения входной величины х выходная величина у
- 12. 5.Распределитель — это коммутационное устройство, которое последовательно во времени и в заданном порядке подключает одну электрическую
- 13. 6.Двигателем называется устройство, в котором энергия того или иного вида преобразуется в механическую.
- 14. 8.Регулирующий орган— это устройство, осуществляющее непосредственное управляющее воздействие на объект управления. В качестве регулирующих органов используются
- 15. Логическими и функциональными элементами называются устройства, осуществляющие определенные логические операции и функциональные зависимости между входными и
- 16. 2. Назначение и классификация датчиков
- 17. В системах автоматики датчик предназначен для преобразования контролируемой или регулируемой величины (параметра контролируемого объекта) в выходной
- 18. Исключительное многообразие датчиков, применяемых в современной автоматике, вызывает необходимость их классификации. Датчики как элементы автоматики могут
- 19. В настоящее время известны следующие типы датчиков, которые наиболее целесообразно классифицировать по входной величине, практически соответствующей
- 20. В зависимости от выходного параметра первичные измерительные преобразователи разделяют на параметрические и генераторные. Их классифицируют также
- 21. Рисунок 1.1 − Реостатные преобразователи для угловых и линейных перемещений Рисунок 1.3 − Устройство и внешний
- 22. Генераторные датчики – это такие преобразователи, которые при изменении конролируемого или регулируемого измеряемого сигнала генерируют на
- 23. принцип работы датчика В простейшем случае датчик осуществляет только одно преобразование Y = f(X), например силы
- 24. Датчики, имеющие такие зависимости, называются датчиками с последовательным преобразованием. Входная часть таких датчиков называется воспринимающим органом,
- 25. ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ ДАТЧИКОВ Датчики, у которых хотя бы одна из величин (входная или
- 26. Чувствительность датчиков — отношение выходной величины к входной в соответствующих единицах. Например, для реостатного датчика единицей
- 27. Погрешности датчиков подразделяются на основные и дополнительные. Основная погрешность — максимальная разность между измеренным значением выходного
- 28. Электрические датчики подразделяются на генераторные и параметрические. В генераторных датчиках осуществляется преобразование измеряемого параметра непосредственно в
- 29. 3. Электромагнитные реле постоянного тока (нейтральные и поляризованные)
- 30. Реле — электрическое или электронное устройство (ключ), предназначенное для замыкания или размыкания электрической цепи при заданных
- 31. Основные части электромагнитного реле: электромагнит, якорь и переключатель. Электромагнит представляет собой электрический провод, намотанный на катушку
- 32. Реле постоянного тока подразделяются: на нейтральные; поляризованные. Нейтральные реле одинаково реагируют на постоянный ток обоих направлений,
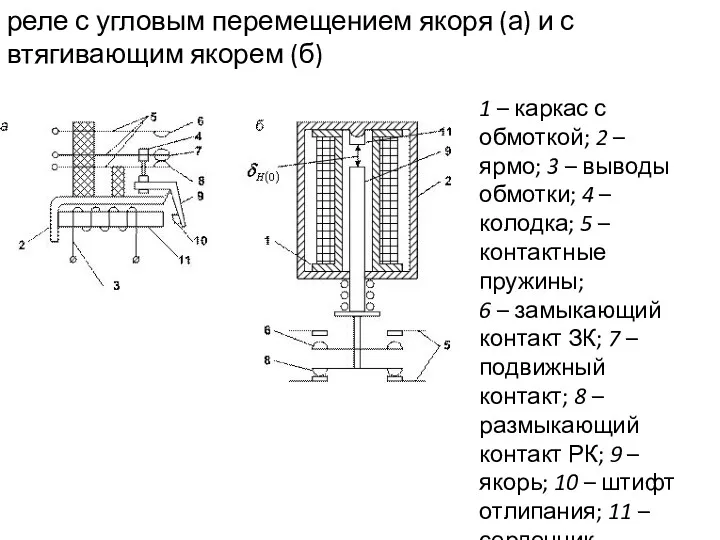
- 33. реле с угловым перемещением якоря (а) и с втягивающим якорем (б) 1 – каркас с обмоткой;
- 34. В отличие от нейтральных электромагнитных реле, у поляризованного реле направление электромагнитного усилия зависит от полярности сигнала
- 35. По конструктивной схеме магнитной цепи различают реле с последовательной, параллельной (дифференциальной) и мостовой магнитными цепями, по
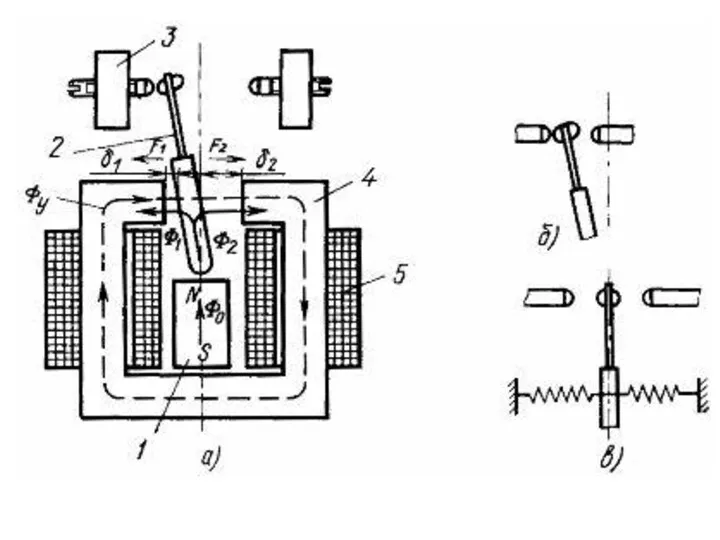
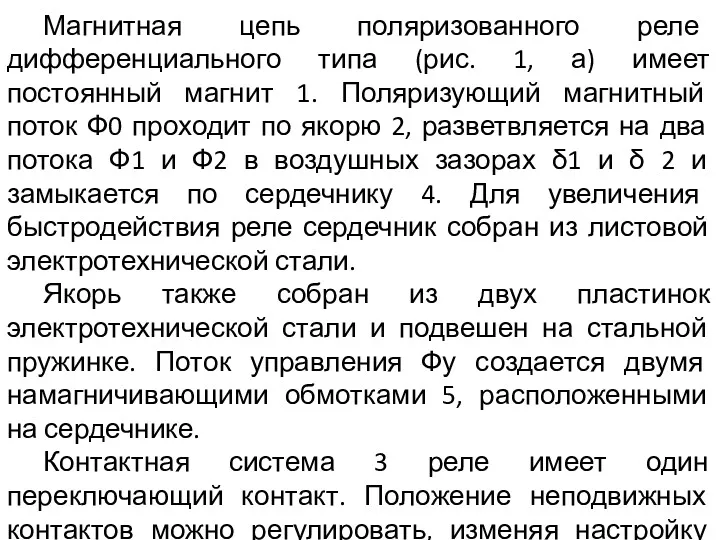
- 37. Магнитная цепь поляризованного реле дифференциального типа (рис. 1, а) имеет постоянный магнит 1. Поляризующий магнитный поток
- 38. Если в обмотках ток отсутствует, то под действием силы притяжения, созданной потоком Ф0, якорь может находиться
- 39. Действие тока управления зависит от его полярности. Для переключения реле необходим ток, который создает в зазоре
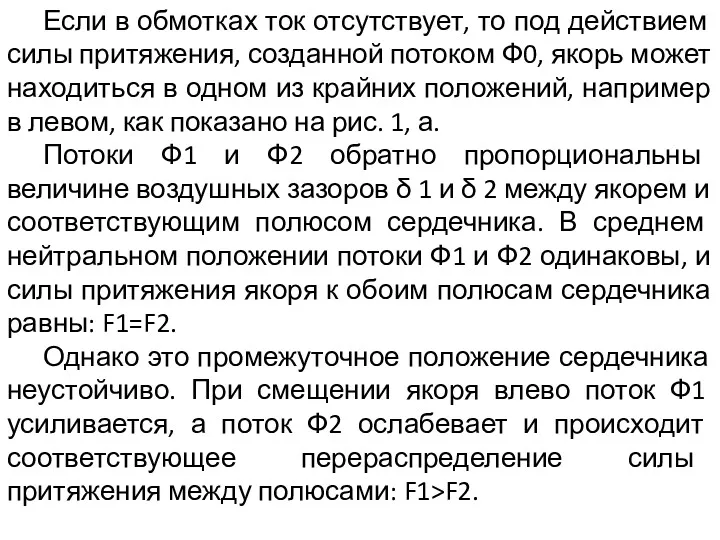
- 40. Поляризованное реле, имеющее такую настройку, называется двухпозиционным. Оно переключается под действием разнополярных импульсов, причем после прекращения
- 41. К числу достоинств поляризованных реле относятся: 1.высокая чувствительность, которая характеризуется мощностью срабатывания и составляет 10-5 Вт;
- 42. 4. Особенности реле переменного тока
- 43. Электромагнитное реле состоит минимум из трех (главных) частей: неподвижного электромагнита, подвижного якоря и переключателя. Электромагнит, по
- 44. Электромагнитное реле переменного тока В некоторых случаях бывает так, что источником энергии для питания обмотки реле
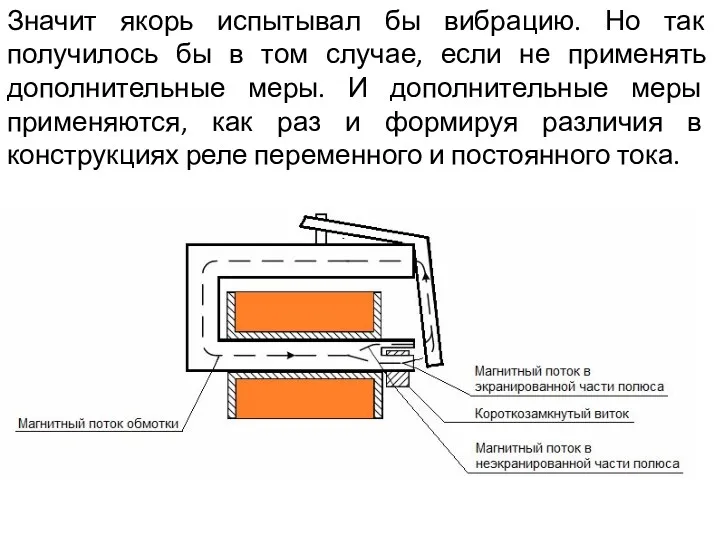
- 45. Значит якорь испытывал бы вибрацию. Но так получилось бы в том случае, если не применять дополнительные
- 46. Реле переменного тока устроено и работает следующим образом. Переменный магнитный поток основной обмотки, проходя через часть
- 47. В результате суммарное тяговое усилие на якорь никогда не обращается в ноль, поскольку оба потока проходят
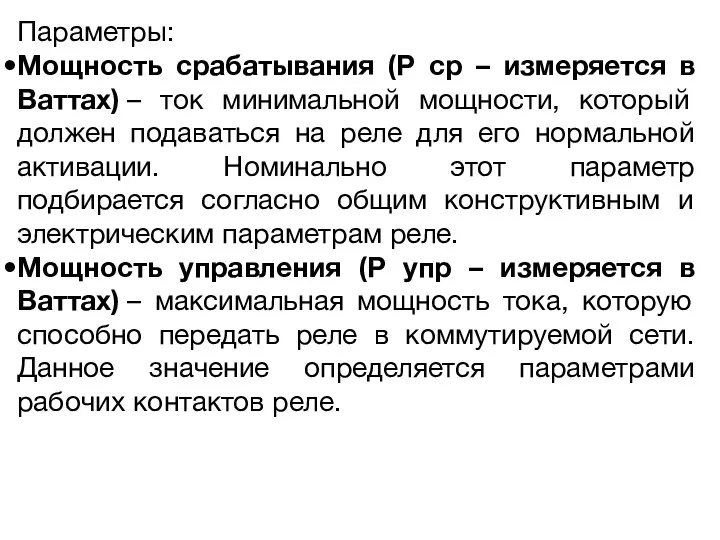
- 48. Параметры: Мощность срабатывания (Р ср – измеряется в Ваттах) – ток минимальной мощности, который должен подаваться
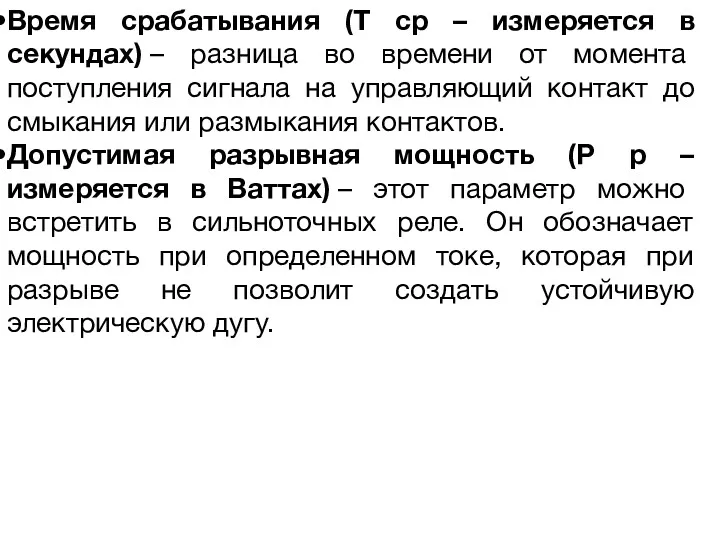
- 49. Время срабатывания (Т ср – измеряется в секундах) – разница во времени от момента поступления сигнала
- 50. Диаграмма работы реле во времени Для управляющей цепи и самого реле характерна некоторая инертность, из-за чего
- 51. Срабатывание – имеет два таких интервала: время трогания (tтр) и время на движение якоря(tдв). То есть
- 52. Помимо перечисленного, у реле разных типов в ходу следующие параметры: Коэффициент возврата (Kb) – отношение отпускающего
- 53. 5.Безъякорные реле на герконах
- 54. Безъякорные реле Главные недостатки электромагнитных контактных реле, из-за которых бесконтактная техника отодвинула их на задний план,
- 55. Однако в последнее время новый отряд контактных элементов, занимающих промежуточное положение (по достоинствам, а не по
- 56. В общем случае безъякорные реле представляют собой стеклянную ампулу, пространство которой заполнено инертным газом для улучшения
- 57. Поверх ампулы размещается обмотка, по которой пропускается необходимый ток для создания магнитного поля вдоль герметизированных контактов.
- 59. Достоинства герконовых реле: полная герметизация контакта; простота конструкции, малая масса и габариты; высокое быстродействие, что позволяет
- 60. Недостатки герконовых реле: - низкая чувствительность у МДС (магнитная движущая сила) управления герконовых реле; - восприимчивость
- 61. 6.Бесконтактные переключающие устройства на транзисторах и тиристорах, их преимущества
- 62. В силовых цепях для отключения тока применяют устройства на основе тиристоров. Тиристор – управляемый полупроводниковый прибор,
- 63. Цепь остается включенной в течение всего времени, пока подаются управляющие импульсы. При их снятии запирание тиристоров
- 64. В запертом состоянии тиристор выдерживает определенное напряжение («обратное напряжение»). Гальваническая связь отключенных частей цепи сохраняется вследствие
- 65. Особенностью тиристоров является повышенное падение напряжения на полупроводниковом контакте, что приводит к значительному выделению мощности и,
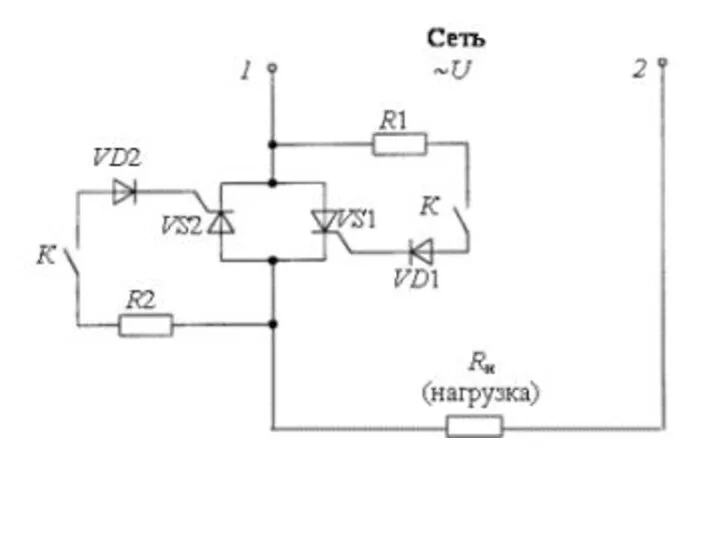
- 67. Тиристорный однополюсный контактор. Для включения контактора и подачи напряжения на нагрузку должны замкнуться контакты К в
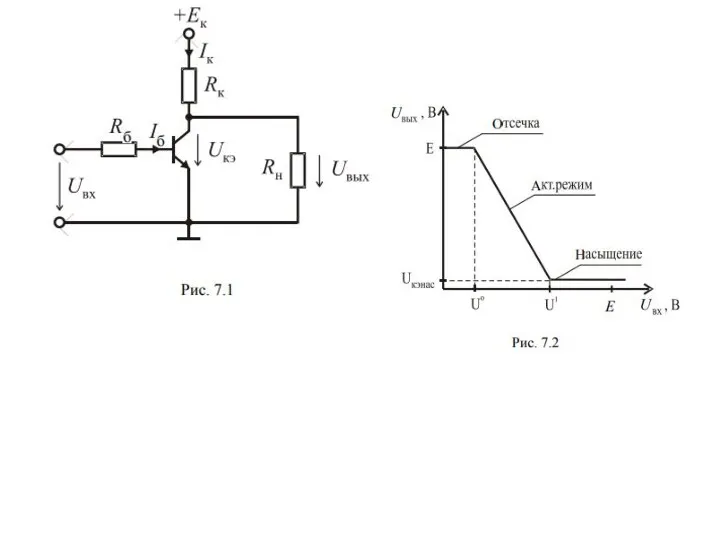
- 68. Ключ на биполярном транзисторе Простейший ключ на биполярном транзисторе показан на рис. 7.1. Резистор Rб в
- 70. Статический режим. В статическом режиме ключ может быть закрыт (транзистор находится в режиме отсечки) либо открыт
- 71. Если на входе действует импульс напряжения такой величины, чтобы транзистор находился в режиме насыщения то ток
- 72. Основное назначение транзисторных выключателей, схемы которых предлагаются вниманию читателей, - включение и выключение нагрузки постоянного тока.
- 74. Схема выключателя показана на рис. 1. Принцип его работы основан на том, что у открытого кремниевого
- 75. Поэтому при следующем нажатии на кнопку напряжение база-эмиттер на транзисторе VT1 будет недостаточным для поддержания его
- 76. По сравнению с контактными аппаратами бесконтактные имеют преимущества: - не образуется электрическая дуга, оказывающая разрушительное воздействие
- 77. 7.Сравнивающие устройства
- 78. Сравнивающие устройства или элементы сравнения являются неотъемлемой частью любой системы автоматического управления. К одному из входов
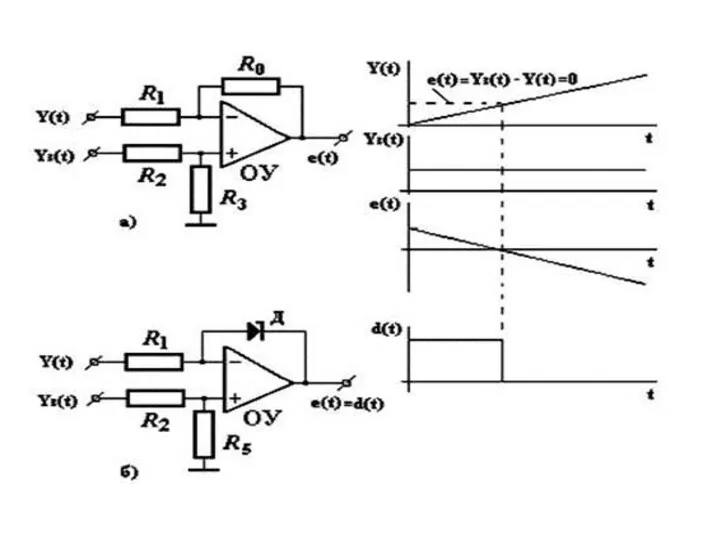
- 79. В сравнивающих устройствах управляемая величина Y(t), контролируемая датчиком, сравнивается с сигналом задания Yз(t), формируемым задатчиком. На
- 80. Сравнивающие устройства измеряют рассогласование ε(t) = Yз(t) - Y(t )– отклонение управляемой величины Y(t) от ее
- 82. 8.Усилители
- 83. В автоматике широко применяются специальные устройства – усилители, способные в десятки и сотни раз увеличивать мощность
- 84. Рабочая характеристика усилителя представляет собой зависимость между выходной и входной величинами при установившемся режиме: Коэффициентом усиления
- 85. В зависимости от средств передачи энергии усилители подразделяются на механические, гидравлические, пневматические, электрические, магнитные, электромагнитные и
- 86. Электронные полупроводниковые усилители. К наиболее распространенным усилителям относятся усилители на электронных лампах, полупроводниковых приборах (транзисторах) и
- 87. Транзисторы – это трехэлектродные полупроводниковые приборы. Они могут быть плоскостными и точечными. Широкое применение получили плоскостные
- 88. Рис. 8.8. Схема транзистора (а) и усилителя на транзисторе (б): К – коллектор; Б – база;
- 89. Магнитные усилители. Усилители этого вида относятся к ферромагнитным устройствам и предназначены для увеличения мощности подводимых электрических
- 90. Неотъемлемой частью любого магнитного усилителя является ферромагнитный сердечник, кривая намагничивания которого имеет нелинейный характер. Магнитная проницаемость
- 91. Магнитные усилители обладают следующими положительными качествами: отсутствием электрической связи между цепью нагрузки и цепями управления, а
- 92. Электромагнитные усилители. Электромагнитные усилители – это специальные электрические генераторы постоянного тока, мощность на выходе которых регулируется
- 93. 9.Исполнительные элементы.
- 94. Исполнительные элементы (ИЭ) систем автоматики предназначены для создания управляющего воздействия на регулирующий орган (РО) объекта управления
- 96. В зависимости от управляющего воздействия на выходе ИЭ делятся на два вида: силовые и параметрические. Если
- 97. Еще одним вариантом ИЭ является следящий привод, который воспроизводит на выходе заданное перемещение, но с большим
- 98. Основными требованиями, которым должны удовлетворять характеристики и параметры ИЭ, являются следующие: - максимальная сила или момент,
- 99. 10.Понятие цифровых узлов
- 100. Цифровыми называются устройства, в которых обрабатываемая информация имеет вид электрических сигналов с ограниченным множеством дискретных значений.
- 101. Различают логические элементы, работающие в положительной и отрицательной логиках. К положительной логике относятся логические элементы, работающие
- 102. Teopетической основой проектирования цифровых систем является алгебра логики или булева алгебра (по имени ее основоположника Д.
- 103. Различают два основных класса цифровых устройств; комбинационные и последовательностные автоматы. В комбинационных автоматах определенному сочетанию входных
- 104. Основы алгебры логики В алгебре логике различные логические выражения могут иметь только два значения: «истинно» или
- 105. Ниже приведены математические записи основных аксиом и законов булевой алгебры. Применение данных аксиом и законов позволяет
- 106. Aксиомы: Законы: 1+х=1 х1+х2=х2+х1 0·х=0 х1·х2=х2·х1 0+х=х х1+х2+х3=(х2+х3)+ х1 1·х=х х1·х2·х3=(х2·х3)· х1 х+х=х х1·(х2+х3)=(х2·х1)+(х1·х3) х·х=х х1+(х2·х3)=(х2+х1)·(х1+х3)
- 107. Основу почти всех цифровых устройств составляют логические элементы. Среди них можно выделить три главных: НЕ, ИЛИ
- 108. Логический элемент НЕ (инвертор) позволяет реализовать функцию Q= (читается: «не А»), где А — входная величина;
- 109. Логический элемент ИЛИ (логическое сложение)позволяет реализовать функцию логического сложения: Q = А + В. Связь между
- 110. Часто вместо логических элементов ИЛИ используются элементы ИЛИ - НЕ. Они проще в производстве и выполняют
- 111. Логический элемент И (логическое умножение) позволяет реализовать операцию логического умножения: Q = AB. Для выполнения операции
- 112. Только на одном транзисторе может быть реализован элемент И — НЕ , на выходе которого сигнал
- 115. Скачать презентацию
1. Общие параметры элементов автоматики
1. Общие параметры элементов автоматики
Системы автоматики состоят из ряда связанных между собой элементов, выполняющих определенные
Системы автоматики состоят из ряда связанных между собой элементов, выполняющих определенные
1. измерительную, представляющую собой различного типа датчики, информирующие о достижении определенного
1. измерительную, представляющую собой различного типа датчики, информирующие о достижении определенного
Все элементы любой группы имеют вход и выход.
На вход поступает
Все элементы любой группы имеют вход и выход.
На вход поступает
Выходной величиной может быть электрический сигнал, отличающийся по величине и характеру.
Выходной величиной может быть электрический сигнал, отличающийся по величине и характеру.
К основным, получившим наибольшее распространение, элементам автоматики следует отнести в первую
К основным, получившим наибольшее распространение, элементам автоматики следует отнести в первую

1.Датчиком называется устройство, преобразующее контролируемую или управляемую величину в выходной сигнал, удобный
1.Датчиком называется устройство, преобразующее контролируемую или управляемую величину в выходной сигнал, удобный

2.Усилитель — это устройство, которое, не изменяя физической природы входного сигнала, производит
2.Усилитель — это устройство, которое, не изменяя физической природы входного сигнала, производит
3.Стабилизатором называется устройство, которое автоматически поддерживает постоянным значение выходной величины у независимо от изменений
3.Стабилизатором называется устройство, которое автоматически поддерживает постоянным значение выходной величины у независимо от изменений
4.Реле представляет собой устройство, в котором при достижении определенного значения входной величины х выходная
4.Реле представляет собой устройство, в котором при достижении определенного значения входной величины х выходная
5.Распределитель — это коммутационное устройство, которое последовательно во времени и в заданном
5.Распределитель — это коммутационное устройство, которое последовательно во времени и в заданном
6.Двигателем называется устройство, в котором энергия того или иного вида преобразуется в
6.Двигателем называется устройство, в котором энергия того или иного вида преобразуется в
8.Регулирующий орган— это устройство, осуществляющее непосредственное управляющее воздействие на объект управления.
8.Регулирующий орган— это устройство, осуществляющее непосредственное управляющее воздействие на объект управления.
Логическими и функциональными элементами называются устройства, осуществляющие определенные логические операции и функциональные
Логическими и функциональными элементами называются устройства, осуществляющие определенные логические операции и функциональные
2. Назначение и классификация датчиков
2. Назначение и классификация датчиков
В системах автоматики датчик предназначен для преобразования контролируемой или регулируемой величины
В системах автоматики датчик предназначен для преобразования контролируемой или регулируемой величины
Исключительное многообразие датчиков, применяемых в современной автоматике, вызывает необходимость их классификации.
Исключительное многообразие датчиков, применяемых в современной автоматике, вызывает необходимость их классификации.
В настоящее время известны следующие типы датчиков, которые наиболее целесообразно классифицировать
В настоящее время известны следующие типы датчиков, которые наиболее целесообразно классифицировать
В зависимости от выходного параметра первичные измерительные преобразователи разделяют на параметрические
В зависимости от выходного параметра первичные измерительные преобразователи разделяют на параметрические
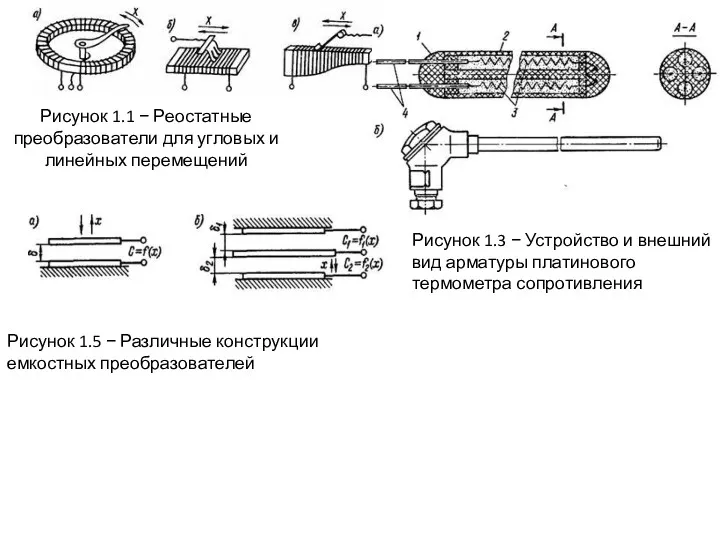
Рисунок 1.1 − Реостатные преобразователи для угловых и линейных перемещений
Рисунок 1.3
Рисунок 1.1 − Реостатные преобразователи для угловых и линейных перемещений
Рисунок 1.3
Генераторные датчики – это такие преобразователи, которые при изменении конролируемого или регулируемого измеряемого
Генераторные датчики – это такие преобразователи, которые при изменении конролируемого или регулируемого измеряемого
принцип работы датчика
В простейшем случае датчик осуществляет только одно преобразование Y
принцип работы датчика
В простейшем случае датчик осуществляет только одно преобразование Y
Датчики, имеющие такие зависимости, называются датчиками с последовательным преобразованием. Входная часть
Датчики, имеющие такие зависимости, называются датчиками с последовательным преобразованием. Входная часть
ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ ДАТЧИКОВ
Датчики, у которых хотя бы одна
ОСНОВНЫЕ ПАРАМЕТРЫ И ХАРАКТЕРИСТИКИ ЭЛЕКТРИЧЕСКИХ ДАТЧИКОВ
Датчики, у которых хотя бы одна
Чувствительность датчиков — отношение выходной величины к входной в соответствующих единицах.
Чувствительность датчиков — отношение выходной величины к входной в соответствующих единицах.
Погрешности датчиков подразделяются на основные и дополнительные.
Основная погрешность — максимальная
Погрешности датчиков подразделяются на основные и дополнительные.
Основная погрешность — максимальная
Электрические датчики подразделяются на генераторные и параметрические.
В генераторных датчиках осуществляется
Электрические датчики подразделяются на генераторные и параметрические.
В генераторных датчиках осуществляется
3. Электромагнитные реле постоянного тока (нейтральные и поляризованные)
3. Электромагнитные реле постоянного тока (нейтральные и поляризованные)
Реле — электрическое или электронное устройство (ключ), предназначенное для замыкания или размыкания
Реле — электрическое или электронное устройство (ключ), предназначенное для замыкания или размыкания
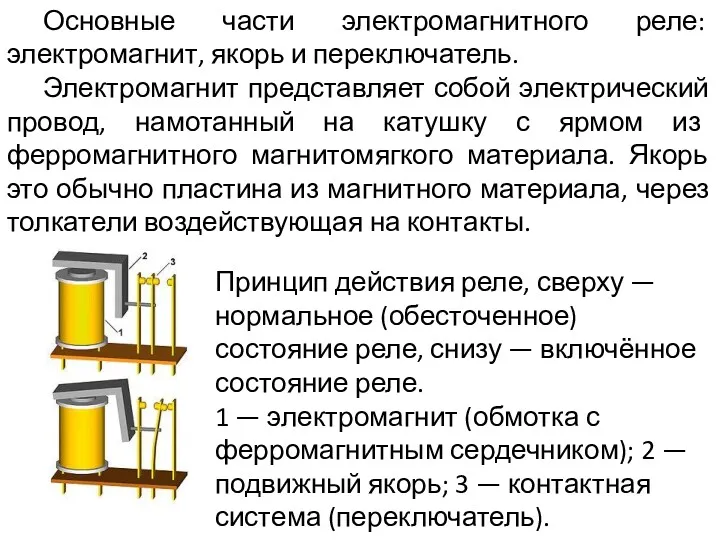
Основные части электромагнитного реле: электромагнит, якорь и переключатель.
Электромагнит представляет собой
Основные части электромагнитного реле: электромагнит, якорь и переключатель.
Электромагнит представляет собой
Реле постоянного тока подразделяются:
на нейтральные;
поляризованные.
Нейтральные реле одинаково реагируют на постоянный ток
Реле постоянного тока подразделяются:
на нейтральные;
поляризованные.
Нейтральные реле одинаково реагируют на постоянный ток
реле с угловым перемещением якоря (а) и с втягивающим якорем (б)
1 –
реле с угловым перемещением якоря (а) и с втягивающим якорем (б)
1 –
В отличие от нейтральных электромагнитных реле, у поляризованного реле направление электромагнитного
В отличие от нейтральных электромагнитных реле, у поляризованного реле направление электромагнитного
По конструктивной схеме магнитной цепи различают реле с последовательной, параллельной (дифференциальной)
По конструктивной схеме магнитной цепи различают реле с последовательной, параллельной (дифференциальной)
Магнитная цепь поляризованного реле дифференциального типа (рис. 1, а) имеет постоянный
Магнитная цепь поляризованного реле дифференциального типа (рис. 1, а) имеет постоянный
Если в обмотках ток отсутствует, то под действием силы притяжения, созданной
Если в обмотках ток отсутствует, то под действием силы притяжения, созданной
Действие тока управления зависит от его полярности. Для переключения реле необходим
Действие тока управления зависит от его полярности. Для переключения реле необходим
Поляризованное реле, имеющее такую настройку, называется двухпозиционным. Оно переключается под действием
Поляризованное реле, имеющее такую настройку, называется двухпозиционным. Оно переключается под действием
К числу достоинств поляризованных реле относятся:
1.высокая чувствительность, которая характеризуется мощностью срабатывания
К числу достоинств поляризованных реле относятся:
1.высокая чувствительность, которая характеризуется мощностью срабатывания
4. Особенности реле переменного тока
4. Особенности реле переменного тока
Электромагнитное реле состоит минимум из трех (главных) частей: неподвижного электромагнита, подвижного
Электромагнитное реле состоит минимум из трех (главных) частей: неподвижного электромагнита, подвижного
Электромагнитное реле переменного тока
В некоторых случаях бывает так, что источником энергии
Электромагнитное реле переменного тока
В некоторых случаях бывает так, что источником энергии
Значит якорь испытывал бы вибрацию. Но так получилось бы в том
Значит якорь испытывал бы вибрацию. Но так получилось бы в том
Реле переменного тока устроено и работает следующим образом. Переменный магнитный поток
Реле переменного тока устроено и работает следующим образом. Переменный магнитный поток
В результате суммарное тяговое усилие на якорь никогда не обращается в
В результате суммарное тяговое усилие на якорь никогда не обращается в
Параметры:
Мощность срабатывания (Р ср – измеряется в Ваттах) – ток минимальной мощности,
Параметры:
Мощность срабатывания (Р ср – измеряется в Ваттах) – ток минимальной мощности,
Время срабатывания (Т ср – измеряется в секундах) – разница во времени
Время срабатывания (Т ср – измеряется в секундах) – разница во времени
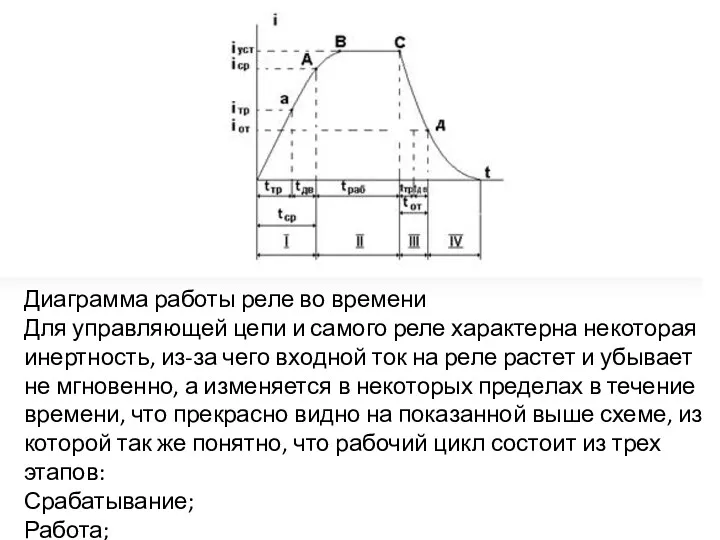
Диаграмма работы реле во времени
Для управляющей цепи и самого реле характерна
Диаграмма работы реле во времени
Для управляющей цепи и самого реле характерна
Срабатывание – имеет два таких интервала: время трогания (tтр) и время
Срабатывание – имеет два таких интервала: время трогания (tтр) и время
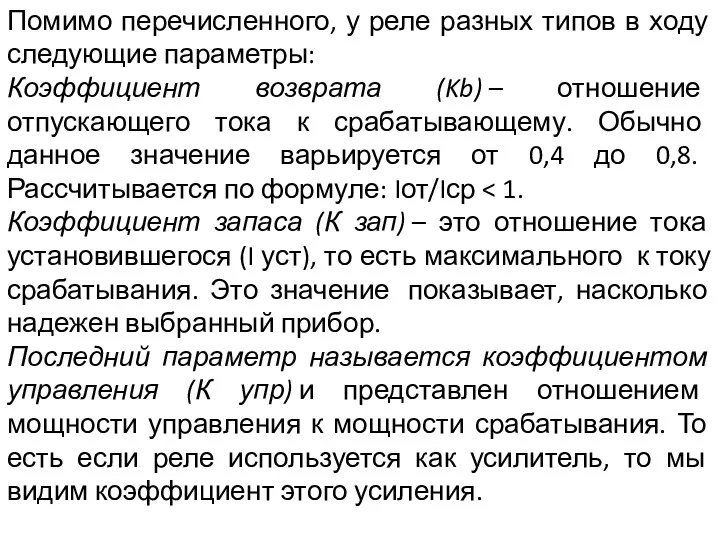
Помимо перечисленного, у реле разных типов в ходу следующие параметры:
Коэффициент возврата
Помимо перечисленного, у реле разных типов в ходу следующие параметры:
Коэффициент возврата
5.Безъякорные реле на герконах
5.Безъякорные реле на герконах
Безъякорные реле
Главные недостатки электромагнитных контактных реле, из-за которых бесконтактная техника отодвинула
Безъякорные реле
Главные недостатки электромагнитных контактных реле, из-за которых бесконтактная техника отодвинула
Однако в последнее время новый отряд контактных элементов, занимающих промежуточное положение
Однако в последнее время новый отряд контактных элементов, занимающих промежуточное положение
В общем случае безъякорные реле представляют собой стеклянную ампулу, пространство которой
В общем случае безъякорные реле представляют собой стеклянную ампулу, пространство которой
Поверх ампулы размещается обмотка, по которой пропускается необходимый ток для создания
Поверх ампулы размещается обмотка, по которой пропускается необходимый ток для создания

Достоинства герконовых реле:
полная герметизация контакта;
простота конструкции, малая масса и габариты;
высокое
Достоинства герконовых реле:
полная герметизация контакта;
простота конструкции, малая масса и габариты;
высокое
Недостатки герконовых реле:
- низкая чувствительность у МДС (магнитная движущая сила) управления
Недостатки герконовых реле:
- низкая чувствительность у МДС (магнитная движущая сила) управления
6.Бесконтактные переключающие устройства на транзисторах и
тиристорах, их преимущества
6.Бесконтактные переключающие устройства на транзисторах и
тиристорах, их преимущества
В силовых цепях для отключения тока применяют устройства на основе тиристоров.
В силовых цепях для отключения тока применяют устройства на основе тиристоров.
Цепь остается включенной в течение всего времени, пока подаются управляющие импульсы.
Цепь остается включенной в течение всего времени, пока подаются управляющие импульсы.
В запертом состоянии тиристор выдерживает определенное напряжение («обратное напряжение»). Гальваническая связь
В запертом состоянии тиристор выдерживает определенное напряжение («обратное напряжение»). Гальваническая связь
Особенностью тиристоров является повышенное падение напряжения на полупроводниковом контакте, что приводит
Особенностью тиристоров является повышенное падение напряжения на полупроводниковом контакте, что приводит
Тиристорный однополюсный контактор.
Для включения контактора и подачи напряжения на нагрузку
Тиристорный однополюсный контактор.
Для включения контактора и подачи напряжения на нагрузку
Ключ на биполярном транзисторе Простейший ключ на биполярном транзисторе показан на
Ключ на биполярном транзисторе Простейший ключ на биполярном транзисторе показан на
Статический режим. В статическом режиме ключ может быть закрыт (транзистор находится
Статический режим. В статическом режиме ключ может быть закрыт (транзистор находится
Если на входе действует импульс напряжения такой величины, чтобы транзистор находился
Если на входе действует импульс напряжения такой величины, чтобы транзистор находился
Основное назначение транзисторных выключателей, схемы которых предлагаются вниманию читателей, - включение
Основное назначение транзисторных выключателей, схемы которых предлагаются вниманию читателей, - включение
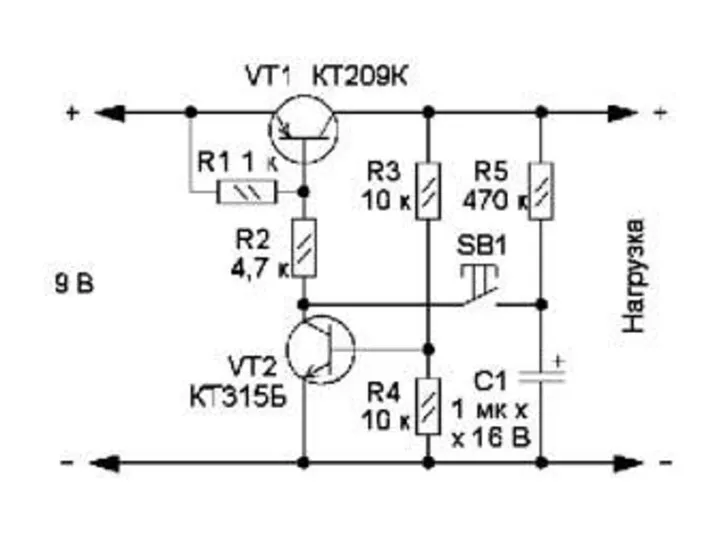
Схема выключателя показана на рис. 1. Принцип его работы основан на
Схема выключателя показана на рис. 1. Принцип его работы основан на
Поэтому при следующем нажатии на кнопку напряжение база-эмиттер на транзисторе VT1
Поэтому при следующем нажатии на кнопку напряжение база-эмиттер на транзисторе VT1
По сравнению с контактными аппаратами бесконтактные имеют преимущества:
- не образуется электрическая дуга, оказывающая
По сравнению с контактными аппаратами бесконтактные имеют преимущества:
- не образуется электрическая дуга, оказывающая
7.Сравнивающие устройства
7.Сравнивающие устройства
Сравнивающие устройства или элементы сравнения являются неотъемлемой частью любой системы автоматического
Сравнивающие устройства или элементы сравнения являются неотъемлемой частью любой системы автоматического
В сравнивающих устройствах управляемая величина Y(t), контролируемая датчиком, сравнивается с сигналом
В сравнивающих устройствах управляемая величина Y(t), контролируемая датчиком, сравнивается с сигналом
Сравнивающие устройства измеряют рассогласование ε(t) = Yз(t) - Y(t )– отклонение управляемой
Сравнивающие устройства измеряют рассогласование ε(t) = Yз(t) - Y(t )– отклонение управляемой
8.Усилители
8.Усилители
В автоматике широко применяются специальные устройства – усилители, способные в десятки
В автоматике широко применяются специальные устройства – усилители, способные в десятки
Рабочая характеристика усилителя представляет собой зависимость между выходной и входной величинами
Рабочая характеристика усилителя представляет собой зависимость между выходной и входной величинами
В зависимости от средств передачи энергии усилители подразделяются на механические, гидравлические,
В зависимости от средств передачи энергии усилители подразделяются на механические, гидравлические,
Электронные полупроводниковые усилители. К наиболее распространенным усилителям относятся усилители на электронных лампах,
Электронные полупроводниковые усилители. К наиболее распространенным усилителям относятся усилители на электронных лампах,
Транзисторы – это трехэлектродные полупроводниковые приборы. Они могут быть плоскостными и точечными.
Транзисторы – это трехэлектродные полупроводниковые приборы. Они могут быть плоскостными и точечными.

Рис. 8.8. Схема транзистора (а) и усилителя на транзисторе (б):
К – коллектор; Б –
Рис. 8.8. Схема транзистора (а) и усилителя на транзисторе (б):
К – коллектор; Б –
Магнитные усилители. Усилители этого вида относятся к ферромагнитным устройствам и предназначены для
Магнитные усилители. Усилители этого вида относятся к ферромагнитным устройствам и предназначены для
Неотъемлемой частью любого магнитного усилителя является ферромагнитный сердечник, кривая намагничивания которого
Неотъемлемой частью любого магнитного усилителя является ферромагнитный сердечник, кривая намагничивания которого
Магнитные усилители обладают следующими положительными качествами: отсутствием электрической связи между цепью
Магнитные усилители обладают следующими положительными качествами: отсутствием электрической связи между цепью
Электромагнитные усилители. Электромагнитные усилители – это специальные электрические генераторы постоянного тока, мощность
Электромагнитные усилители. Электромагнитные усилители – это специальные электрические генераторы постоянного тока, мощность
9.Исполнительные элементы.
9.Исполнительные элементы.
Исполнительные элементы (ИЭ) систем автоматики предназначены для создания управляющего воздействия на
Исполнительные элементы (ИЭ) систем автоматики предназначены для создания управляющего воздействия на

В зависимости от управляющего воздействия на выходе ИЭ делятся на два
В зависимости от управляющего воздействия на выходе ИЭ делятся на два
Еще одним вариантом ИЭ является следящий привод, который воспроизводит на выходе
Еще одним вариантом ИЭ является следящий привод, который воспроизводит на выходе
Основными требованиями, которым должны удовлетворять характеристики и параметры ИЭ, являются следующие:
- максимальная
Основными требованиями, которым должны удовлетворять характеристики и параметры ИЭ, являются следующие:
- максимальная
10.Понятие цифровых узлов
10.Понятие цифровых узлов
Цифровыми называются устройства, в которых обрабатываемая информация имеет вид электрических сигналов
Цифровыми называются устройства, в которых обрабатываемая информация имеет вид электрических сигналов
Различают логические элементы, работающие в положительной и отрицательной логиках. К положительной
Различают логические элементы, работающие в положительной и отрицательной логиках. К положительной
Teopетической основой проектирования цифровых систем является алгебра логики или булева алгебра
Teopетической основой проектирования цифровых систем является алгебра логики или булева алгебра
Различают два основных класса цифровых устройств; комбинационные и последовательностные автоматы.
В
Различают два основных класса цифровых устройств; комбинационные и последовательностные автоматы.
В
Основы алгебры логики
В алгебре логике различные логические выражения могут иметь
Основы алгебры логики
В алгебре логике различные логические выражения могут иметь
Ниже приведены математические записи основных аксиом и законов булевой алгебры. Применение
Ниже приведены математические записи основных аксиом и законов булевой алгебры. Применение
Aксиомы: Законы:
1+х=1 х1+х2=х2+х1
0·х=0 х1·х2=х2·х1
0+х=х х1+х2+х3=(х2+х3)+ х1
1·х=х х1·х2·х3=(х2·х3)· х1
х+х=х х1·(х2+х3)=(х2·х1)+(х1·х3)
х·х=х х1+(х2·х3)=(х2+х1)·(х1+х3)
х+
х·
Aксиомы: Законы:
1+х=1 х1+х2=х2+х1
0·х=0 х1·х2=х2·х1
0+х=х х1+х2+х3=(х2+х3)+ х1
1·х=х х1·х2·х3=(х2·х3)· х1
х+х=х х1·(х2+х3)=(х2·х1)+(х1·х3)
х·х=х х1+(х2·х3)=(х2+х1)·(х1+х3)
х+
х·
Основу почти всех цифровых устройств составляют логические элементы. Среди них можно
Основу почти всех цифровых устройств составляют логические элементы. Среди них можно
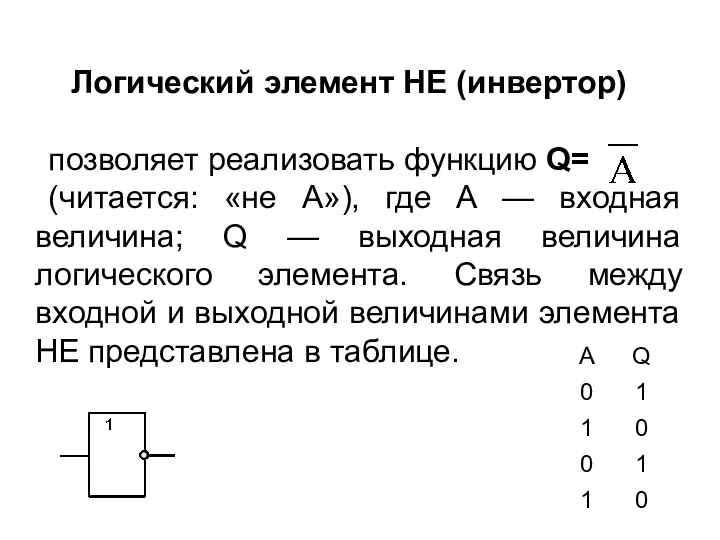
Логический элемент НЕ (инвертор)
позволяет реализовать функцию Q=
(читается: «не А»),
Логический элемент НЕ (инвертор)
позволяет реализовать функцию Q=
(читается: «не А»),
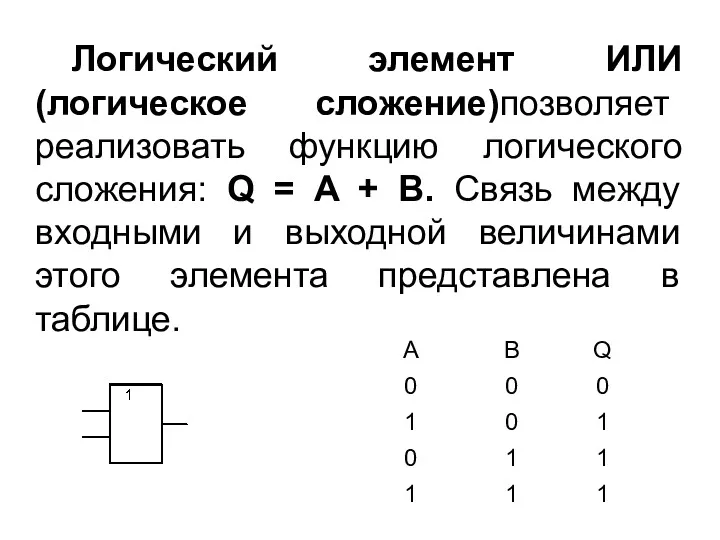
Логический элемент ИЛИ (логическое сложение)позволяет реализовать функцию логического сложения: Q =
Логический элемент ИЛИ (логическое сложение)позволяет реализовать функцию логического сложения: Q =
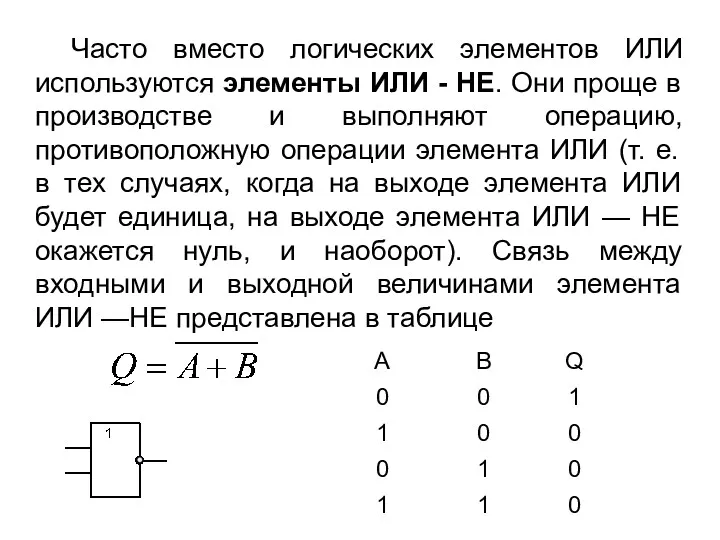
Часто вместо логических элементов ИЛИ используются элементы ИЛИ - НЕ. Они
Часто вместо логических элементов ИЛИ используются элементы ИЛИ - НЕ. Они
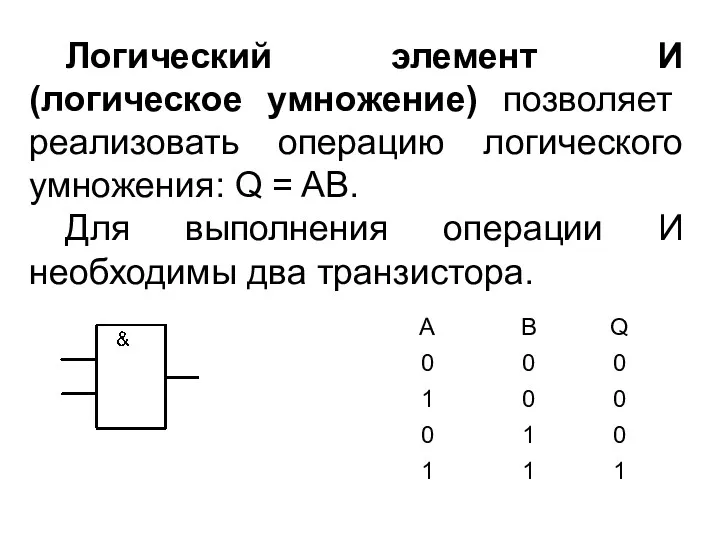
Логический элемент И (логическое умножение) позволяет реализовать операцию логического умножения: Q
Логический элемент И (логическое умножение) позволяет реализовать операцию логического умножения: Q
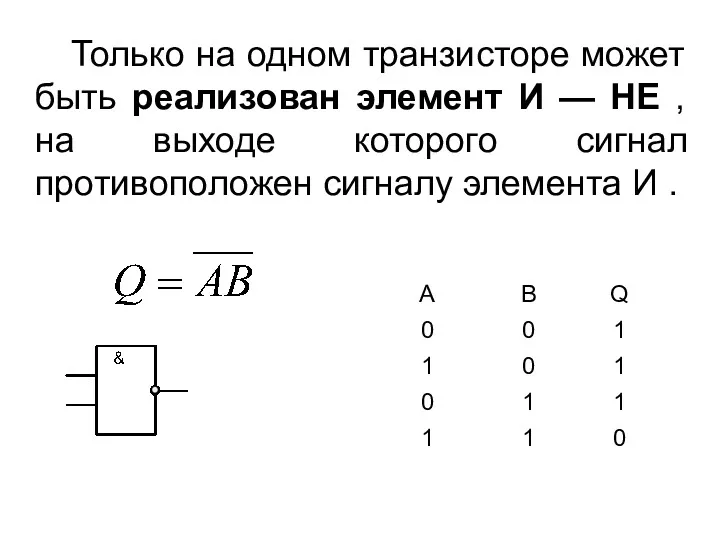
Только на одном транзисторе может быть реализован элемент И — НЕ
Только на одном транзисторе может быть реализован элемент И — НЕ

 Дисграфия
Дисграфия Реформирование психиатрической службы. Опыт США и Европы
Реформирование психиатрической службы. Опыт США и Европы Внутренние устройства ПК
Внутренние устройства ПК урок по теме Механические передачи Конспект занятия
урок по теме Механические передачи Конспект занятия Своя игра по биологии: клетка, размножение организмов, онтогенез, генетика
Своя игра по биологии: клетка, размножение организмов, онтогенез, генетика Стихи на уроках - 5
Стихи на уроках - 5 Методы управления персоналом
Методы управления персоналом Технологический процесс получения штампованной поковки
Технологический процесс получения штампованной поковки Религия. Мировые религии
Религия. Мировые религии Презентация Развивающая среда для мелкой моторики
Презентация Развивающая среда для мелкой моторики Матросов Александр Матвеевич
Матросов Александр Матвеевич Волонтёрское движение Тёплые руки
Волонтёрское движение Тёплые руки Учебная экскурсия Скульптурные произведения искусства на античные темы в Эрмитаже.
Учебная экскурсия Скульптурные произведения искусства на античные темы в Эрмитаже. Психоэмоциональное напряжение как фактор риска соматических заболеваний детей в условиях Арктического региона
Психоэмоциональное напряжение как фактор риска соматических заболеваний детей в условиях Арктического региона Финансовый контроль бюджетной сферы
Финансовый контроль бюджетной сферы Қой шаруашылығы
Қой шаруашылығы Сигналы и их спектры
Сигналы и их спектры Как же нам выполнить Великое Поручение?
Как же нам выполнить Великое Поручение? Окислительно-восстановительные реакции в органической химии
Окислительно-восстановительные реакции в органической химии My favourite food
My favourite food Социальный проект Я хочу быть здоровым
Социальный проект Я хочу быть здоровым Угадай картинку: Acid rain, chop down, conservation of natural resources, drought, dump, emissions, noise pollution/standards
Угадай картинку: Acid rain, chop down, conservation of natural resources, drought, dump, emissions, noise pollution/standards Negative Externalities
Negative Externalities 20231105_prezentatsiya1._zvezdnyy_chas
20231105_prezentatsiya1._zvezdnyy_chas Общие сведения о пожарной безопасности технологических процессов производств
Общие сведения о пожарной безопасности технологических процессов производств Рельеф России
Рельеф России Swot анализ агентства праздников Братья Басковы
Swot анализ агентства праздников Братья Басковы Основа для всего. Понятие и значение Конституции. Основы конституционного строя РФ
Основа для всего. Понятие и значение Конституции. Основы конституционного строя РФ