- Функциональные элементы САР ЭПС: исполнительные и управляющие элементы

Содержание
- 2. Схема обеспечивает регулирование вы-ходного напряжения от 0 до иdмакс. Однако с целью реализации рекуперативного режима, во-первых,
- 3. Это уравнение может быть представлено в виде структурной схемы, приведенной на рис. 23, а передаточная функция
- 4. Зависимость Fв =f(Ф) является обратной по отношению кривой намагничивания Ф= F(Fв). Завершением этого процесса является запирание
- 5. Такой режим работы соответствует схеме на рис. 24в при обратном направлении показанном на этом рисунке штриховыми
- 6. Графические результаты решение системы уравнений применительно к электровозу ВЛ85 в виде кривых иd(ωt) и iв(ωt) приведены
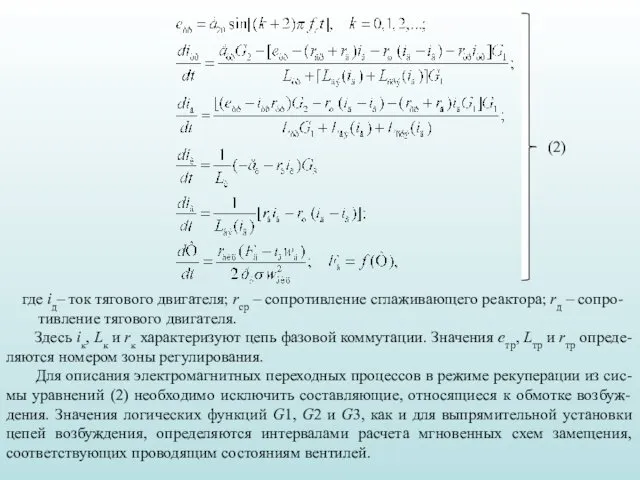
- 7. (2) где iд– ток тягового двигателя; rср – сопротивление сглаживающего реактора; rд – сопро- тивление тягового
- 8. На ЭПС постоянного тока плавное экономичное регулирование возможно при помощи импульсных преобразователей (рис. 25а и б).
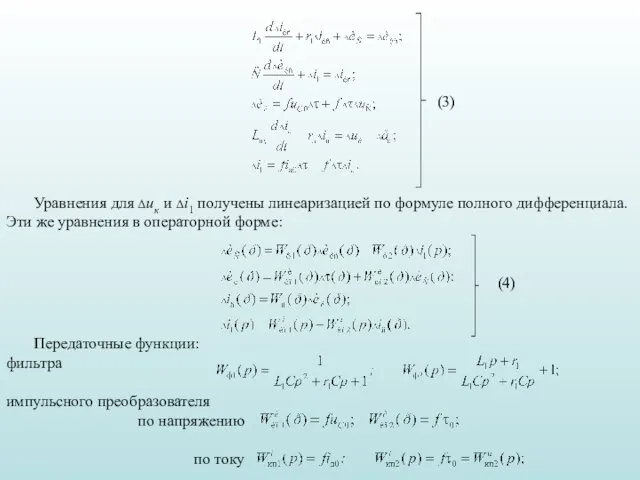
- 9. (3) Уравнения для Δик и Δi1 получены линеаризацией по формуле полного дифференциала. Эти же уравнения в
- 10. передаточная функция тягового двигателя последовательного возбуждения (лекция 2) Выражения передаточных функций по напряжению и току получены
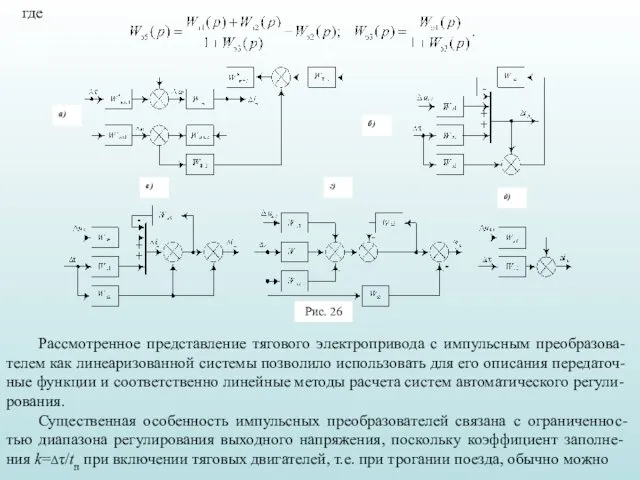
- 11. где Рассмотренное представление тягового электропривода с импульсным преобразова-телем как линеаризованной системы позволило использовать для его описания
- 12. наращивать, начиная с некоторого минимального значения (Δτ/tп)мин, а не с нуля. Необходимое значение kмин рассчитывают из
- 13. Регулировочная характеристика, показанная на рис. 28а, существенно нелинейна, при-чём характер нелинейности зависит от соотношения rв /R.
- 14. – с гальваническим разделением, выполненном на выхо-де усилителя импульсов управления УМ (рис. 29б). Гальваническим разделением может
- 15. Блок синхронизации БС (рис. 30) – это усилитель в режиме нуль-органа, сравниваю-щий напряжение переменного тока с
- 17. Скачать презентацию
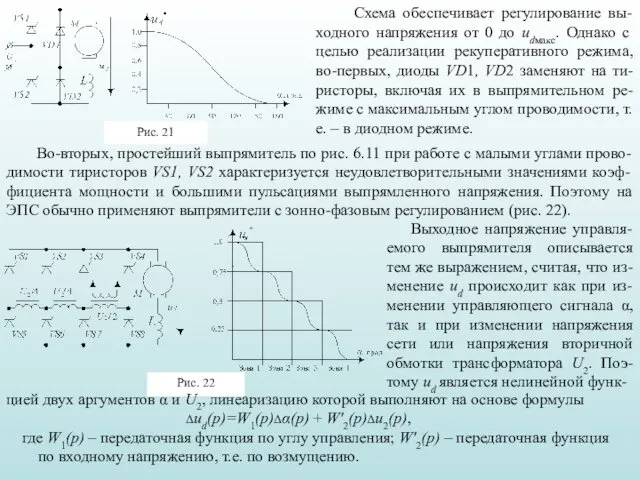
Схема обеспечивает регулирование вы-ходного напряжения от 0 до иdмакс. Однако
Схема обеспечивает регулирование вы-ходного напряжения от 0 до иdмакс. Однако
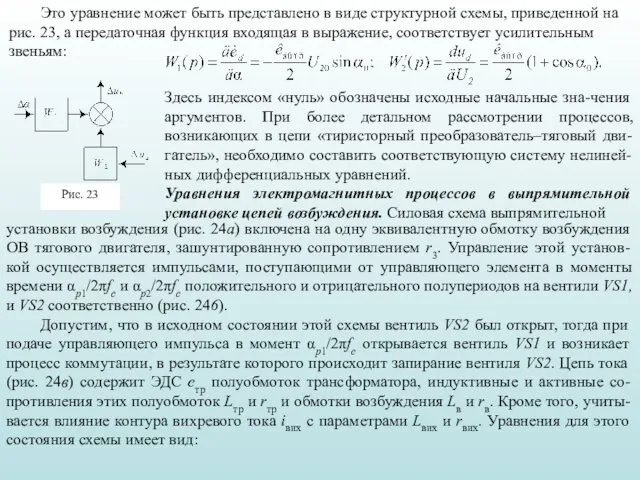
Это уравнение может быть представлено в виде структурной схемы, приведенной на
Это уравнение может быть представлено в виде структурной схемы, приведенной на
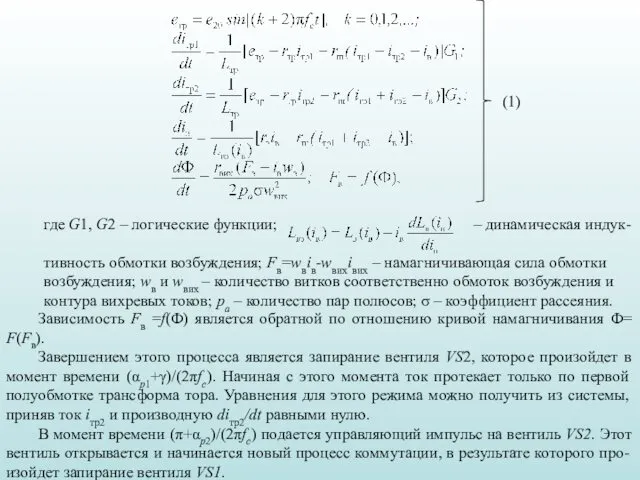
Зависимость Fв =f(Ф) является обратной по отношению кривой намагничивания Ф= F(Fв).
Завершением
Зависимость Fв =f(Ф) является обратной по отношению кривой намагничивания Ф= F(Fв).
Завершением
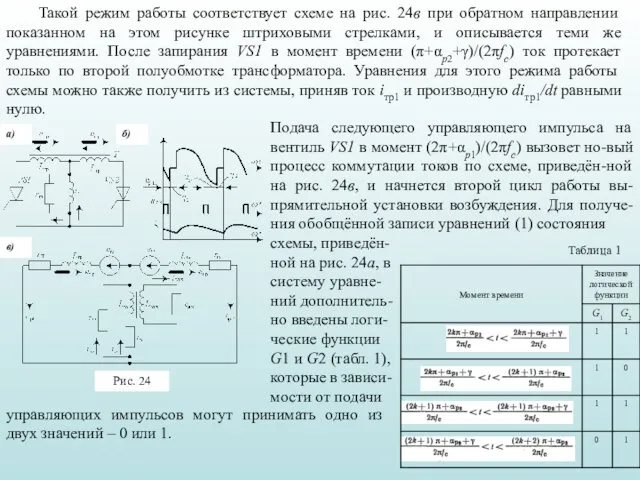
Такой режим работы соответствует схеме на рис. 24в при обратном направлении
Такой режим работы соответствует схеме на рис. 24в при обратном направлении
Графические результаты решение системы уравнений применительно к электровозу ВЛ85 в
Графические результаты решение системы уравнений применительно к электровозу ВЛ85 в
(2)
где iд– ток тягового двигателя; rср – сопротивление сглаживающего реактора;
(2)
где iд– ток тягового двигателя; rср – сопротивление сглаживающего реактора;
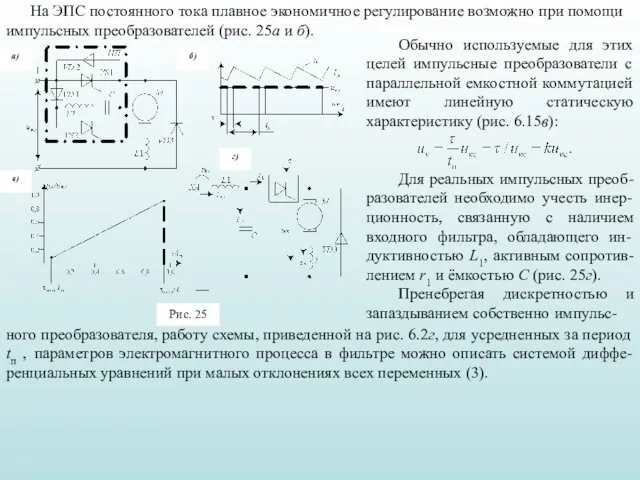
На ЭПС постоянного тока плавное экономичное регулирование возможно при помощи
На ЭПС постоянного тока плавное экономичное регулирование возможно при помощи
(3)
Уравнения для Δик и Δi1 получены линеаризацией по формуле полного
(3)
Уравнения для Δик и Δi1 получены линеаризацией по формуле полного
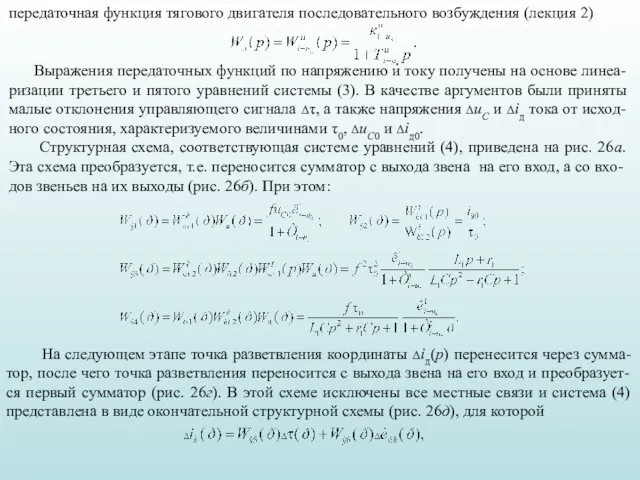
передаточная функция тягового двигателя последовательного возбуждения (лекция 2)
Выражения передаточных функций по
передаточная функция тягового двигателя последовательного возбуждения (лекция 2)
Выражения передаточных функций по
где
Рассмотренное представление тягового электропривода с импульсным преобразова-телем как линеаризованной системы
где
Рассмотренное представление тягового электропривода с импульсным преобразова-телем как линеаризованной системы
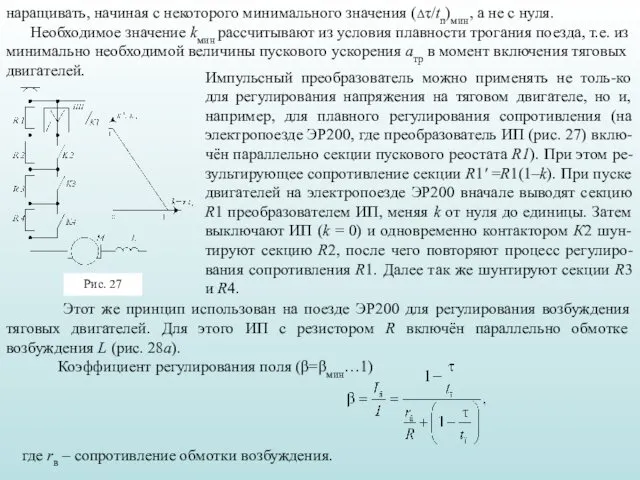
наращивать, начиная с некоторого минимального значения (Δτ/tп)мин, а не с нуля.
наращивать, начиная с некоторого минимального значения (Δτ/tп)мин, а не с нуля.
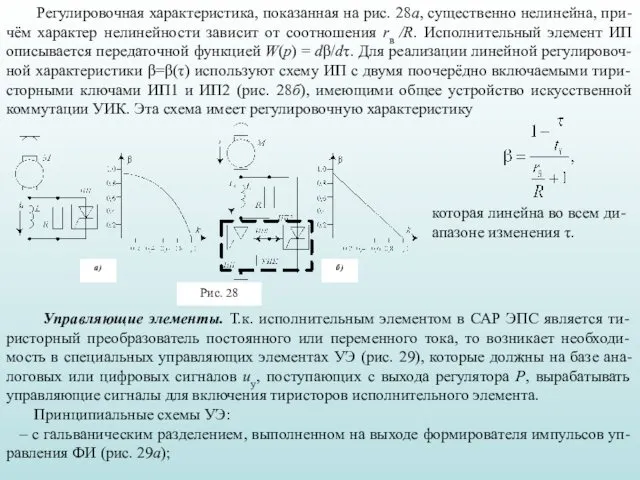
Регулировочная характеристика, показанная на рис. 28а, существенно нелинейна, при-чём характер
Регулировочная характеристика, показанная на рис. 28а, существенно нелинейна, при-чём характер
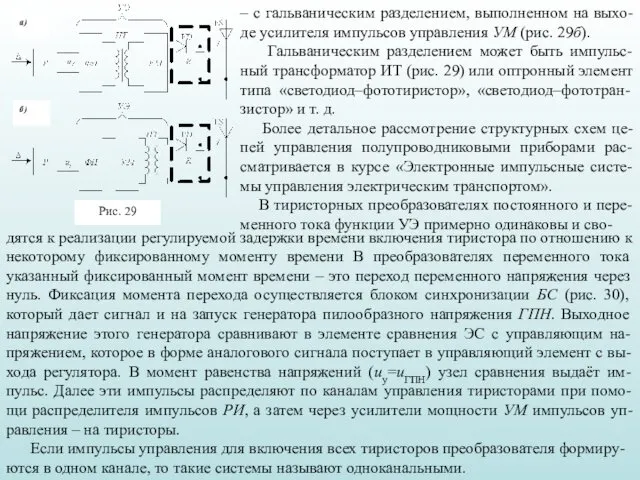
– с гальваническим разделением, выполненном на выхо-де усилителя импульсов управления УМ
– с гальваническим разделением, выполненном на выхо-де усилителя импульсов управления УМ
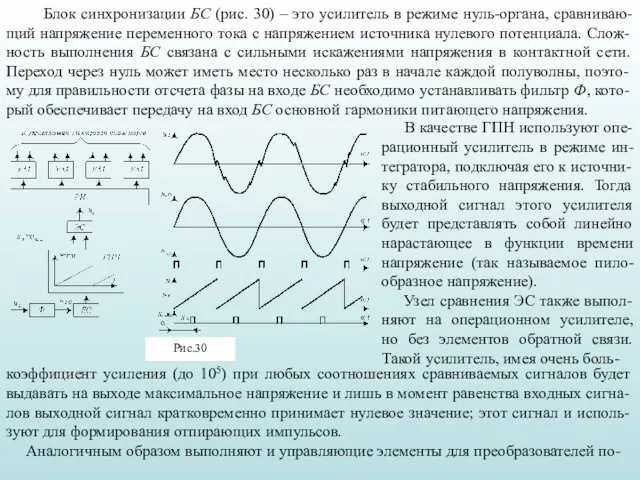
Блок синхронизации БС (рис. 30) – это усилитель в режиме
Блок синхронизации БС (рис. 30) – это усилитель в режиме
 Характеристика топливно-энергетической базы Крыма
Характеристика топливно-энергетической базы Крыма Вред курения
Вред курения Презентация. Летний оздоровительный лагерь.
Презентация. Летний оздоровительный лагерь. Анализ динамики экономических показателей России и США
Анализ динамики экономических показателей России и США Биосфера. Среды жизни
Биосфера. Среды жизни Аллергия. Аллергены
Аллергия. Аллергены Презентация Заповеди Блаженствпо предмету ОПК
Презентация Заповеди Блаженствпо предмету ОПК Облік, контроль і аналіз непрямих виробничих витрат
Облік, контроль і аналіз непрямих виробничих витрат Конспект внеклассного занятия на тему: Законы жизни класса.
Конспект внеклассного занятия на тему: Законы жизни класса. Внутренние воды РТ
Внутренние воды РТ Формирование культурной среды небольшого города/села
Формирование культурной среды небольшого города/села аналогічні-гомологічні органи
аналогічні-гомологічні органи Организаторская и воспитательная работа командира подразделения по укреплению воинской дисциплины. Тема № 5
Организаторская и воспитательная работа командира подразделения по укреплению воинской дисциплины. Тема № 5 О мерах по поддержки генерирующих объектов на основе ВИЭ. Законодательная база поддержки генерации ВИЭ
О мерах по поддержки генерирующих объектов на основе ВИЭ. Законодательная база поддержки генерации ВИЭ Интернет в жизни старшеклассника: за или против
Интернет в жизни старшеклассника: за или против Тольятти. История любимого города
Тольятти. История любимого города Пейзаж — поэтичная и музыкальная живопись
Пейзаж — поэтичная и музыкальная живопись Особенности рельефа территории России
Особенности рельефа территории России Направления реализации Национальной стратегии по обращению с ТКО и ВМР
Направления реализации Национальной стратегии по обращению с ТКО и ВМР ФЭМП 14.04.2020
ФЭМП 14.04.2020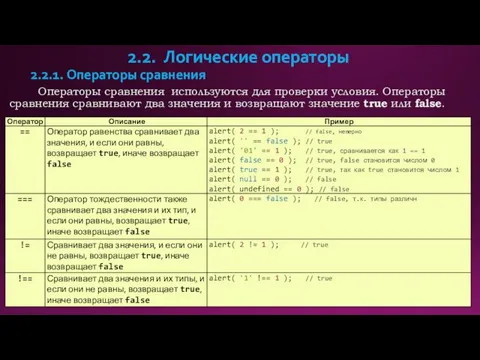 Логические операторы
Логические операторы Обрезка яблони и груши
Обрезка яблони и груши Проектирование современного урока биологии, географии в соответствии с требованиями ФГОС
Проектирование современного урока биологии, географии в соответствии с требованиями ФГОС Правовое регулирование предпринимательской деятельности
Правовое регулирование предпринимательской деятельности Презентация для детей
Презентация для детей Миотоническая дистрофия Россолимо-Штейнерта-Куршманна-Баттена
Миотоническая дистрофия Россолимо-Штейнерта-Куршманна-Баттена Плотность
Плотность Праздники и календари. Основы мировых религиозных наук (4 класс)
Праздники и календари. Основы мировых религиозных наук (4 класс)