- Государственная система промышленных приборов и средств автоматизации

Содержание
- 2. Основные сведения Государственная система промышленных приборов и средств автоматизации (ГСП) создана с целью обеспечения техническими средствами
- 3. По ф у н к ц и о н а л ь н о м у
- 4. Заложенные в ГСП общие для всех изделий понятия совместимости можно сформулировать следующим образом. Информационная совместимость —
- 5. По роду и с п о л ь з у е м о й э н
- 6. Информационные сигналы могут быть представлены в естественном или унифицированном виде. Естественным сигналом называется сигнал первичного измерительного
- 7. Электро- и пневмосиловые преобразователи ГСП Для преобразования измерительной информации в унифицированный сигнал в ГСП применяются преобразователи,
- 8. Пневмосиловой преобразователь ГСП (рис. 9.2) преобразует усилие, развиваемое измерительным устройством ИУ, в пневматический сигнал. Измеряемая физическая
- 9. Нормирующие преобразователи ЭДС и сопротивления в унифицированный токовый сигнал Они применяются для введения информации от термопар
- 10. Интеллектуальные датчики В последние годы появился новый класс датчиков — так называемые интеллектуальные датчики. В отличие
- 11. Интеллект датчиков обеспечивает выполнение некоторого набора из следующих функций: 1) первичная обработка информации в самом датчике;
- 12. Общая структурная схема интеллектуального датчика показана на рис. 9.4.
- 13. Измеряемый физический параметр воспринимается чувствительным элементом, на выходе которого возникает электрический сигнал, соответствующий значению параметра. В
- 14. Таким образом, по сравнению с обычными, традиционными датчиками современные интеллектуальные датчики обеспечивают: 1) резкое уменьшение искажений
- 15. Элементы промышленной пневмоавтоматики Пневматической емкостью тела или устройства по аналогии с электрической емкостью можно назвать его
- 16. Исполнительные устройства Исполнительные устройства- это технические средства использования командной информации и воздействия на объект управления Исполнительное
- 17. Классификация ИМ по виду энергии, создающей усилие перемещения регулирующего органа: пневматические, гидравлические и электрические. В п
- 18. Регулирующие органы имеют самые разнообразные конструкции, зависящие от объекта управления. По виду воздействия на объект их
- 19. Создание интеллектуальных ИМ неразрывно связано с развитием мехатроники — области науки и техники, которая занимается управлением
- 20. Вторая группа — силовые преобразователи, источники электрической энергии для управляемого двигателя. Вход и выход у этих
- 21. Общие сведения о системах автоматического управления и регулирования Любой технологический процесс характеризуется совокупностью технологических параметров, значения
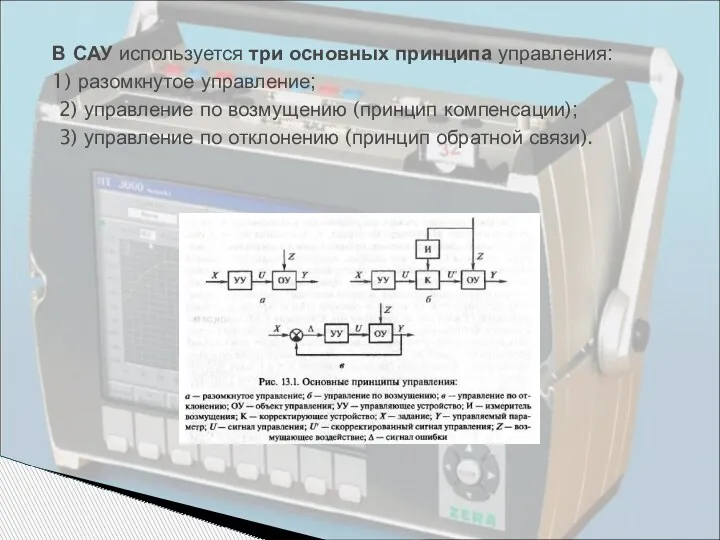
- 22. В САУ используется три основных принципа управления: 1) разомкнутое управление; 2) управление по возмущению (принцип компенсации);
- 23. Принцип разомкнутого управления (рис. 13.1, а) отличается простотой технической реализации. На вход управляющего устройства подается задание
- 24. Класс автоматических систем, построенных на основе принципа управления по отклонению, получил название система автоматического регулирования (САР).
- 25. По функциональному назначению (расхода, давления и т.п.), виду исполь- зуемых сигналов (аналоговые или дискретные) и энергии
- 26. Математическое описание САР Наиболее распространенным методом описания, анализа и синтеза САР (САУ) является операционный метод (метод
- 27. Математические модели элементов и систем автоматического регулирования Любая система, в том числе и САР, состоит из
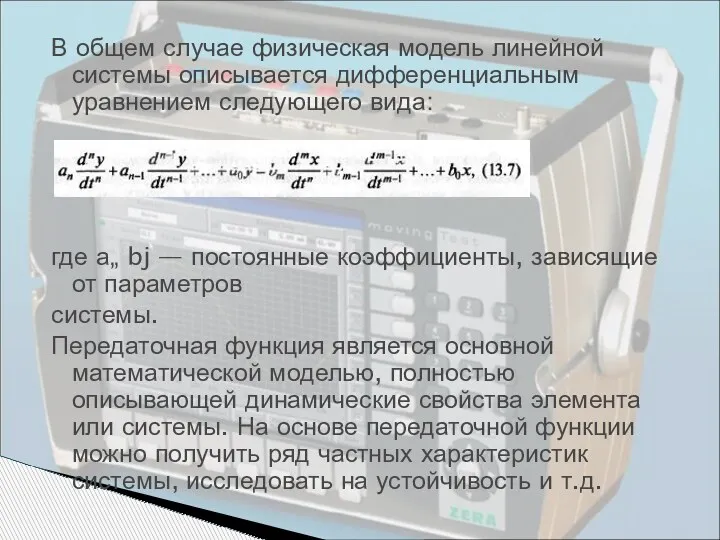
- 28. В общем случае физическая модель линейной системы описывается дифференциальным уравнением следующего вида: где а„ bj —
- 29. Многие звенья САР независимо от их физической природы описываются одинаковыми дифференциальными уравнениями, следовательно, обладают одинаковыми динамическими
- 30. Устойчивость систем автоматического регулирования Устойчивость является одним из необходимых условий, обеспечивающих нормальное функционирование автоматических систем. В
- 31. Одним из эффективных методов анализа является критерий Гурвица, который определяет необходимые и достаточные условия устойчивости системы
- 32. Показатели качества систем автоматического регулирования Система автоматического регулирования оценивается устойчивостью, точностью в установившихся режимах и качеством
- 34. Скачать презентацию
Основные сведения
Государственная система промышленных приборов и средств автоматизации (ГСП) создана с
Основные сведения
Государственная система промышленных приборов и средств автоматизации (ГСП) создана с
По ф у н к ц и о н а л
По ф у н к ц и о н а л
Заложенные в ГСП общие для всех изделий понятия совместимости можно сформулировать
Заложенные в ГСП общие для всех изделий понятия совместимости можно сформулировать
По роду и с п о л ь з у е
По роду и с п о л ь з у е
Информационные сигналы могут быть представлены в естественном или унифицированном виде.
Естественным сигналом
Информационные сигналы могут быть представлены в естественном или унифицированном виде.
Естественным сигналом
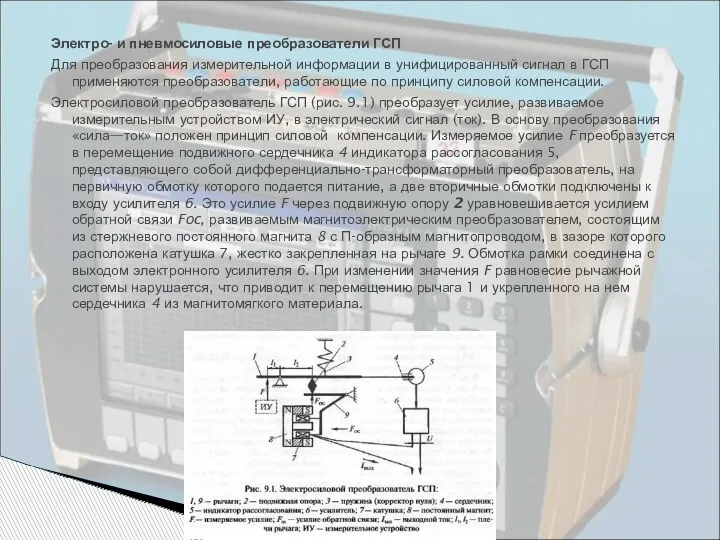
Электро- и пневмосиловые преобразователи ГСП
Для преобразования измерительной информации в унифицированный сигнал
Электро- и пневмосиловые преобразователи ГСП
Для преобразования измерительной информации в унифицированный сигнал
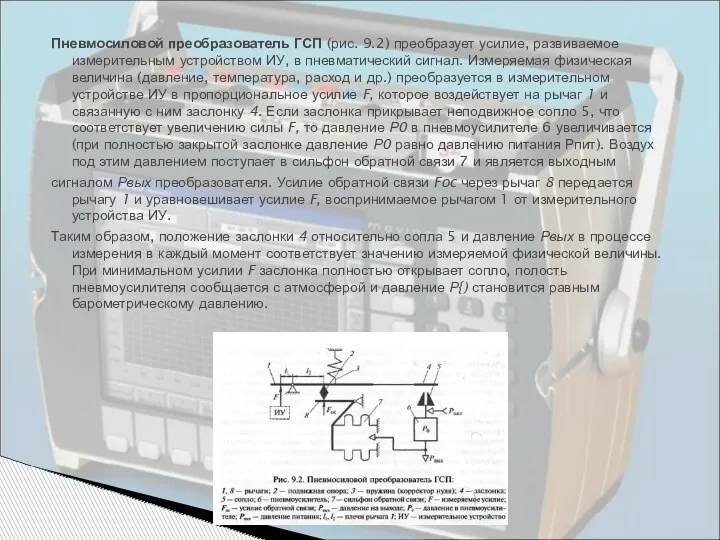
Пневмосиловой преобразователь ГСП (рис. 9.2) преобразует усилие, развиваемое измерительным устройством ИУ,
Пневмосиловой преобразователь ГСП (рис. 9.2) преобразует усилие, развиваемое измерительным устройством ИУ,
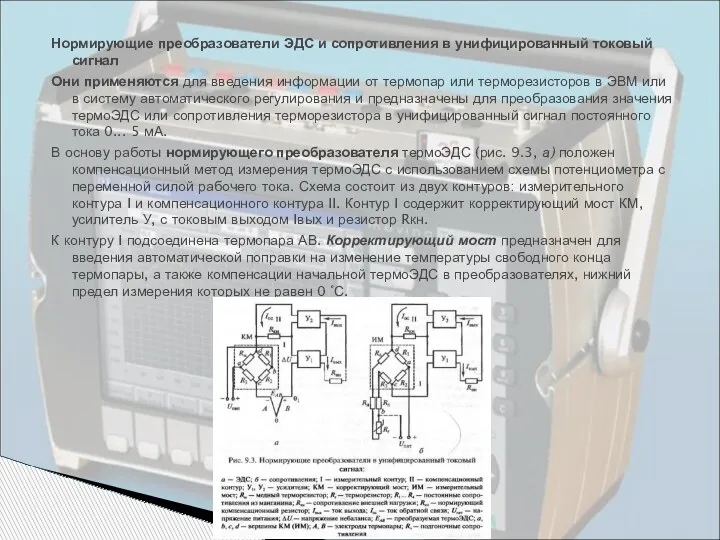
Нормирующие преобразователи ЭДС и сопротивления в унифицированный токовый сигнал
Они применяются для
Нормирующие преобразователи ЭДС и сопротивления в унифицированный токовый сигнал
Они применяются для
Интеллектуальные датчики
В последние годы появился новый класс датчиков — так называемые
Интеллектуальные датчики
В последние годы появился новый класс датчиков — так называемые
Интеллект датчиков обеспечивает выполнение некоторого набора из следующих функций:
1) первичная
Интеллект датчиков обеспечивает выполнение некоторого набора из следующих функций:
1) первичная
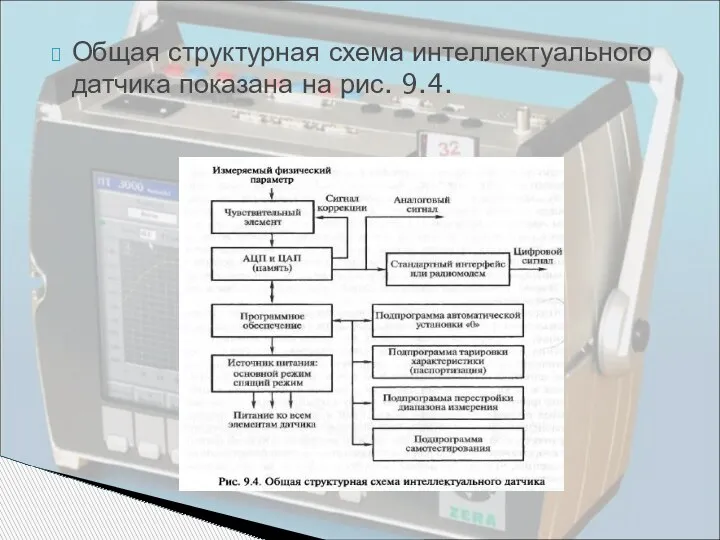
Общая структурная схема интеллектуального датчика показана на рис. 9.4.
Общая структурная схема интеллектуального датчика показана на рис. 9.4.
Измеряемый физический параметр воспринимается чувствительным элементом, на выходе которого возникает электрический
Измеряемый физический параметр воспринимается чувствительным элементом, на выходе которого возникает электрический
Таким образом, по сравнению с обычными, традиционными датчиками современные интеллектуальные датчики
Таким образом, по сравнению с обычными, традиционными датчиками современные интеллектуальные датчики
Элементы промышленной пневмоавтоматики
Пневматической емкостью тела или устройства по аналогии с
Элементы промышленной пневмоавтоматики
Пневматической емкостью тела или устройства по аналогии с
Исполнительные устройства
Исполнительные устройства- это технические средства использования командной информации и воздействия
Исполнительные устройства
Исполнительные устройства- это технические средства использования командной информации и воздействия
Классификация ИМ по виду энергии, создающей усилие перемещения регулирующего органа: пневматические,
Классификация ИМ по виду энергии, создающей усилие перемещения регулирующего органа: пневматические,
Регулирующие органы имеют самые разнообразные конструкции, зависящие от объекта управления. По
Регулирующие органы имеют самые разнообразные конструкции, зависящие от объекта управления. По
Создание интеллектуальных ИМ неразрывно связано с развитием мехатроники — области науки
Создание интеллектуальных ИМ неразрывно связано с развитием мехатроники — области науки
Вторая группа — силовые преобразователи, источники электрической энергии для управляемого двигателя.
Вторая группа — силовые преобразователи, источники электрической энергии для управляемого двигателя.
Общие сведения о системах автоматического
управления и регулирования
Любой технологический процесс характеризуется совокупностью
Общие сведения о системах автоматического
управления и регулирования
Любой технологический процесс характеризуется совокупностью
В САУ используется три основных принципа управления:
1) разомкнутое управление;
2)
В САУ используется три основных принципа управления:
1) разомкнутое управление;
2)
Принцип разомкнутого управления (рис. 13.1, а) отличается простотой технической реализации. На
Принцип разомкнутого управления (рис. 13.1, а) отличается простотой технической реализации. На
Класс автоматических систем, построенных на основе принципа управления по отклонению, получил
Класс автоматических систем, построенных на основе принципа управления по отклонению, получил
По функциональному назначению (расхода, давления и т.п.), виду исполь-
зуемых сигналов (аналоговые
По функциональному назначению (расхода, давления и т.п.), виду исполь-
зуемых сигналов (аналоговые
Математическое описание САР
Наиболее распространенным методом описания, анализа и синтеза САР
Математическое описание САР
Наиболее распространенным методом описания, анализа и синтеза САР
Математические модели элементов и систем автоматического регулирования
Любая система, в том числе
Математические модели элементов и систем автоматического регулирования
Любая система, в том числе
В общем случае физическая модель линейной системы описывается дифференциальным уравнением следующего
В общем случае физическая модель линейной системы описывается дифференциальным уравнением следующего
Многие звенья САР независимо от их физической природы описываются одинаковыми дифференциальными
Многие звенья САР независимо от их физической природы описываются одинаковыми дифференциальными
Устойчивость систем автоматического регулирования
Устойчивость является одним из необходимых условий, обеспечивающих нормальное
Устойчивость систем автоматического регулирования
Устойчивость является одним из необходимых условий, обеспечивающих нормальное
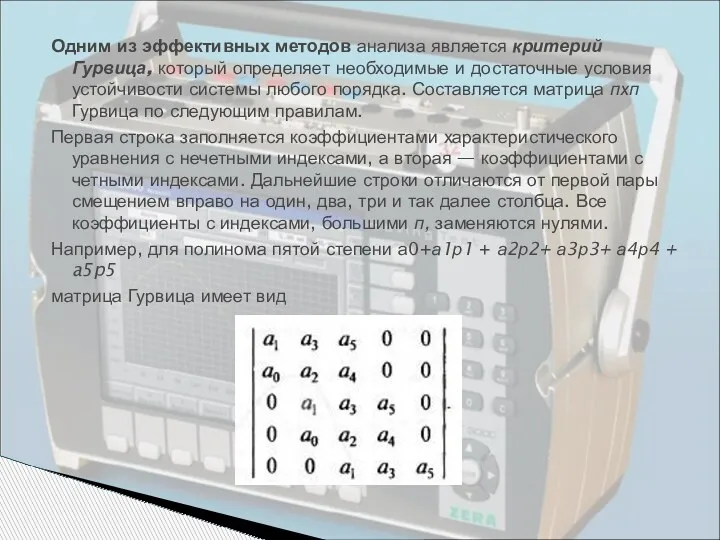
Одним из эффективных методов анализа является критерий Гурвица, который определяет необходимые
Одним из эффективных методов анализа является критерий Гурвица, который определяет необходимые
Показатели качества систем автоматического
регулирования
Система автоматического регулирования оценивается устойчивостью, точностью в установившихся
Показатели качества систем автоматического
регулирования
Система автоматического регулирования оценивается устойчивостью, точностью в установившихся
 Методы расчёта графиков строительства
Методы расчёта графиков строительства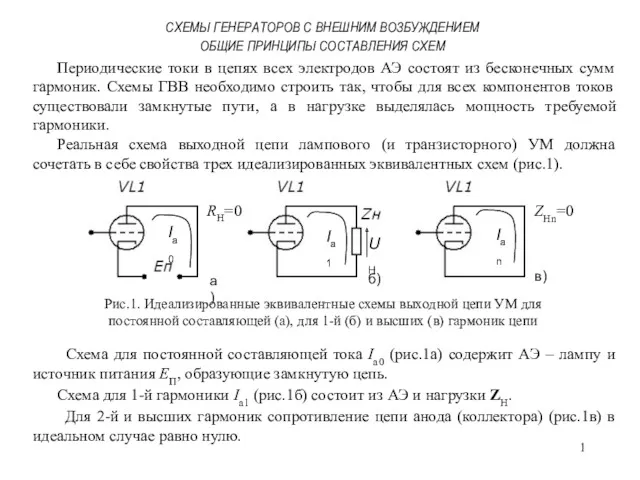 Схемы генераторов с внешним возбуждением. Общие принципы составления схем
Схемы генераторов с внешним возбуждением. Общие принципы составления схем Нормативная регламентация работы архива организаций
Нормативная регламентация работы архива организаций Театр
Театр Une petite histoire
Une petite histoire Классный час. Тема:Блокада Ленинграда.
Классный час. Тема:Блокада Ленинграда. Созданная мною презентация о Школе Успех в ИНТЕРНЕТ Про100
Созданная мною презентация о Школе Успех в ИНТЕРНЕТ Про100 Государство Норвегия
Государство Норвегия Литературные памятники древних германцев
Литературные памятники древних германцев Судебные прения в гражданском процессе
Судебные прения в гражданском процессе Shops and Shopping
Shops and Shopping Сварка плавящимися и неплавящимися электродами. Защита зоны сварки
Сварка плавящимися и неплавящимися электродами. Защита зоны сварки Середнє арифметичне чисел
Середнє арифметичне чисел Земля и что это такое. 7 класс
Земля и что это такое. 7 класс Презентация к классному часу День птиц
Презентация к классному часу День птиц Афганская война (1979-1989)
Афганская война (1979-1989) Evolution of phones
Evolution of phones Будь внимательным 2 зв Л,Р
Будь внимательным 2 зв Л,Р Cтруктура автоматизированных электроприводов (АЭП). Способы пуска и торможения
Cтруктура автоматизированных электроприводов (АЭП). Способы пуска и торможения Свобода в деятельности человека
Свобода в деятельности человека Учебное пособие для занятий аппликацией Веревочная веточка
Учебное пособие для занятий аппликацией Веревочная веточка Россия и ближнее зарубежье
Россия и ближнее зарубежье Архитектурно-градостроительная концепция развития земельных участков принадлежащих ООО Уваровский-1, ЗАО Агропроминвест
Архитектурно-градостроительная концепция развития земельных участков принадлежащих ООО Уваровский-1, ЗАО Агропроминвест Курси Arduino для початківців
Курси Arduino для початківців Презентация к Викторине по краеведению.
Презентация к Викторине по краеведению. Введение в обмен веществ и основы биоэнергетики
Введение в обмен веществ и основы биоэнергетики Урок Углерод
Урок Углерод Разработка метода гидроизоляции трансмиссии автомобилей УАЗ-3163 и УАЗ390995
Разработка метода гидроизоляции трансмиссии автомобилей УАЗ-3163 и УАЗ390995