- Инструменты. Python. Библиотека trikRuntime

Содержание
- 2. Инструменты Python Официальный сайт Python, где можно скачать интерпретатор (Python 3): https://www.python.org/ Официальная документация по Python:
- 3. Python Python - высокоуровневый язык программирования общего назначения, ориентированный на повышение производительности разработчика и читаемости кода.
- 4. Python - операторы if (self.x > 0): brick.motor("M3").setPower(100) brick.motor("M4").setPower(100) while i i+=1 for i in range(5):
- 5. Python - числа >>> a = 5 >>> print(a, "is of type", type(a)) 5 is of
- 6. Python – списки, кортежи a = [1, 2.2, 'python’] a[1] = 4.5 print(a) # 1, 4.5,
- 7. Объекты класса brick motor invert currentPower события свойства методы setPower() brake() display sensor
- 8. Объекты trikRuntime brick script mailbox gamepad
- 9. Отладка Вывод в консоль print(“Привет, мир”) # Привет, мир! var b = 70 var sens =
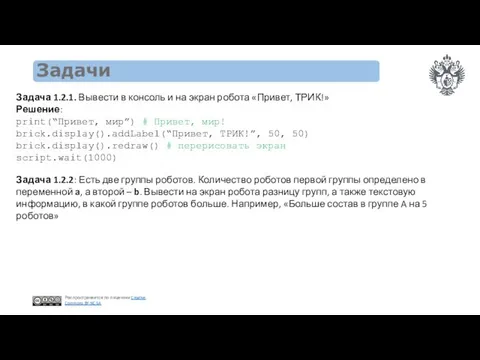
- 10. Задачи Задача 1.2.1. Вывести в консоль и на экран робота «Привет, ТРИК!» Решение: print(“Привет, мир”) #
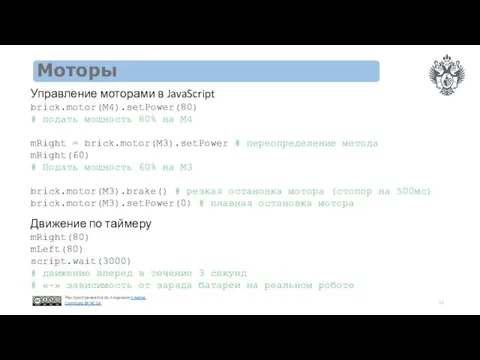
- 11. Моторы Управление моторами в JavaScript brick.motor(M4).setPower(80) # подать мощность 80% на М4 mRight = brick.motor(M3).setPower #
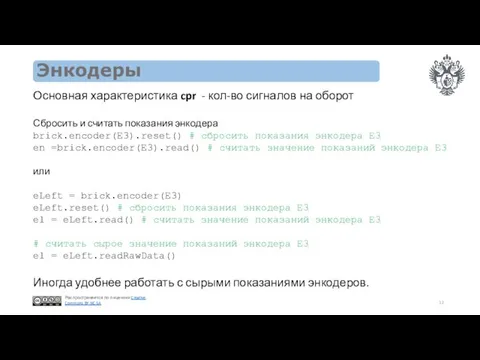
- 12. Энкодеры Основная характеристика cpr - кол-во сигналов на оборот Сбросить и считать показания энкодера brick.encoder(E3).reset() #
- 13. Энкодеры Движение по энкодерам #моторы var mLeft = brick.motor(M3).setPower var mRight = brick.motor(M4).setPower //энкодеры var eLeft
- 14. Задачи Задача 1.2.3: Реализовать функции # движение вперед-назад на расстояние s со скоростью v. # При
- 16. Скачать презентацию
Инструменты
Python
Официальный сайт Python, где можно скачать интерпретатор (Python 3): https://www.python.org/
Официальная
Инструменты
Python
Официальный сайт Python, где можно скачать интерпретатор (Python 3): https://www.python.org/
Официальная
Python
Python - высокоуровневый язык программирования общего назначения, ориентированный на повышение производительности разработчика
Python
Python - высокоуровневый язык программирования общего назначения, ориентированный на повышение производительности разработчика
Python - операторы
if (self.x > 0):
brick.motor("M3").setPower(100)
brick.motor("M4").setPower(100)
while i < 5:
script.wait(100)
i+=1
for
Python - операторы
if (self.x > 0):
brick.motor("M3").setPower(100)
brick.motor("M4").setPower(100)
while i < 5:
script.wait(100)
i+=1
for
Python - числа
>>> a = 5
>>> print(a, "is of type", type(a))
5
Python - числа
>>> a = 5
>>> print(a, "is of type", type(a))
5
![Python – списки, кортежи a = [1, 2.2, 'python’] a[1]](/_ipx/f_webp&q_80&fit_contain&s_1440x1080/imagesDir/jpg/81462/slide-5.jpg)
Python – списки, кортежи
a = [1, 2.2, 'python’]
a[1] = 4.5
print(a)
#
Python – списки, кортежи
a = [1, 2.2, 'python’]
a[1] = 4.5
print(a)
#
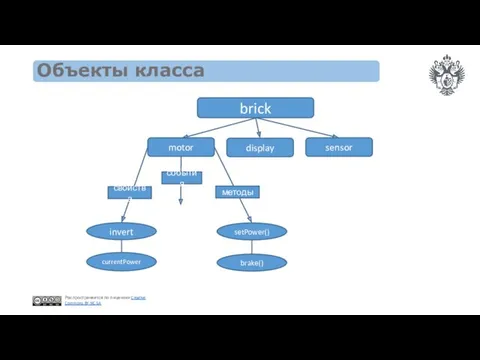
Объекты класса
brick
motor
invert
currentPower
события
свойства
методы
setPower()
brake()
display
sensor
Объекты класса
brick
motor
invert
currentPower
события
свойства
методы
setPower()
brake()
display
sensor

Объекты trikRuntime
brick
script
mailbox
gamepad
Объекты trikRuntime
brick
script
mailbox
gamepad

Отладка
Вывод в консоль
print(“Привет, мир”) # Привет, мир!
var b = 70
var sens
Отладка
Вывод в консоль print(“Привет, мир”) # Привет, мир! var b = 70 var sens
Задачи
Задача 1.2.1. Вывести в консоль и на экран робота «Привет, ТРИК!»
Решение:
Задачи
Задача 1.2.1. Вывести в консоль и на экран робота «Привет, ТРИК!»
Решение:
Моторы
Управление моторами в JavaScript
brick.motor(M4).setPower(80)
# подать мощность 80% на М4
mRight =
Моторы
Управление моторами в JavaScript
brick.motor(M4).setPower(80)
# подать мощность 80% на М4
mRight =
Энкодеры
Основная характеристика cpr - кол-во сигналов на оборот
Сбросить и считать
Энкодеры
Основная характеристика cpr - кол-во сигналов на оборот
Сбросить и считать
Энкодеры
Движение по энкодерам
#моторы
var mLeft = brick.motor(M3).setPower
var mRight = brick.motor(M4).setPower
//энкодеры
var eLeft =
Энкодеры
Движение по энкодерам
#моторы
var mLeft = brick.motor(M3).setPower
var mRight = brick.motor(M4).setPower
//энкодеры
var eLeft =
Задачи
Задача 1.2.3: Реализовать функции
# движение вперед-назад на расстояние s со скоростью
Задачи
Задача 1.2.3: Реализовать функции
# движение вперед-назад на расстояние s со скоростью
 Беҙҙә ҡышлаусы ҡоштар
Беҙҙә ҡышлаусы ҡоштар Операции над графами и их свойства
Операции над графами и их свойства Экстрагенитальная патология и беременность
Экстрагенитальная патология и беременность Белая снежинка мастер-класс
Белая снежинка мастер-класс Личное и групповое снаряжение. Снаряжение для водного туризма, экипировка туриста-водника
Личное и групповое снаряжение. Снаряжение для водного туризма, экипировка туриста-водника Тропинками родного края
Тропинками родного края Экологические проблемы
Экологические проблемы Презентация к классному часу Если добрый ты-это хорошо учителя начальных классов МКОУ СОШ №8с. Тахта Ипатовского района Ставропольского края Остренко Л. П.
Презентация к классному часу Если добрый ты-это хорошо учителя начальных классов МКОУ СОШ №8с. Тахта Ипатовского района Ставропольского края Остренко Л. П. Блокада Ленинграда: малые памятники.
Блокада Ленинграда: малые памятники. ВИКТОРИНА. ЖИВОТНЫЙ МИР
ВИКТОРИНА. ЖИВОТНЫЙ МИР Построение рабочих зон гидравлических экскаваторов. Практическое занятие 4
Построение рабочих зон гидравлических экскаваторов. Практическое занятие 4 Реки
Реки История политических учений
История политических учений Синдром нарушения (дефицита) внимания с гиперактивностью (СНВГ или СДВГ)
Синдром нарушения (дефицита) внимания с гиперактивностью (СНВГ или СДВГ) 20231109_my_bedroom
20231109_my_bedroom Балетмейстер
Балетмейстер Открытый урок Сложные эфиры. Жиры.
Открытый урок Сложные эфиры. Жиры. Презентация Настольный календарь
Презентация Настольный календарь Футболки с принтом “Jack in Prague”. Описание макета. Требования к макету
Футболки с принтом “Jack in Prague”. Описание макета. Требования к макету Психологический портрет подростка
Психологический портрет подростка Мелкая моторика
Мелкая моторика Автономнае пребывание человека в природной среде
Автономнае пребывание человека в природной среде Доктор Антон Павлович Чехов
Доктор Антон Павлович Чехов Нептун
Нептун Основные водоотведения
Основные водоотведения Киноафоризмы
Киноафоризмы Искусство Древнего Китая. Живопись
Искусство Древнего Китая. Живопись Виды устройств вывода информации. Лекция №20
Виды устройств вывода информации. Лекция №20