- Построение рабочих зон гидравлических экскаваторов. Практическое занятие 4

Содержание
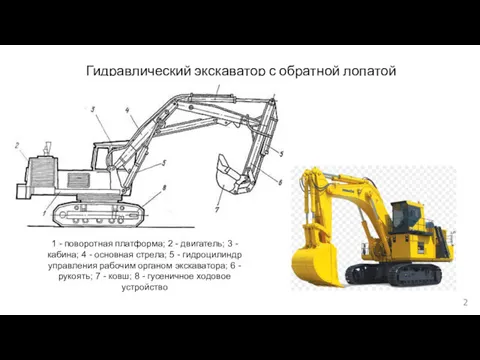
- 2. Гидравлический экскаватор с обратной лопатой 1 - поворотная платформа; 2 - двигатель; 3 - кабина; 4
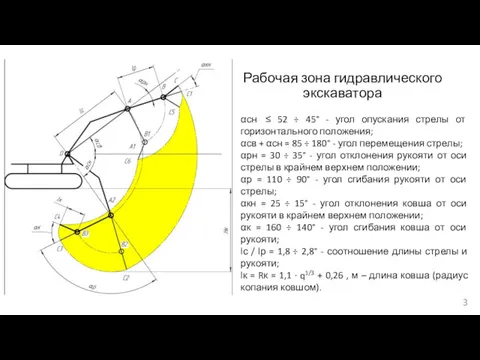
- 3. Рабочая зона гидравлического экскаватора αсн ≤ 52 ÷ 45° - угол опускания стрелы от горизонтального положения;
- 4. Построение рабочей зоны гидравлического экскаватора 1. Отмечается место расположения шарнира крепления стрелы к экскаватору в т.
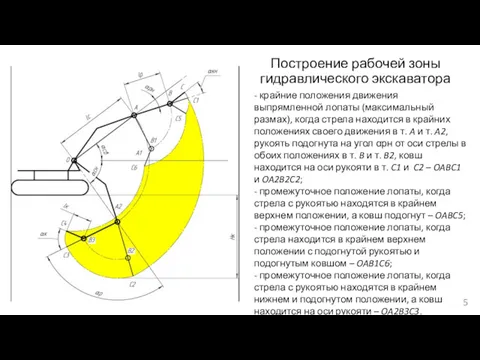
- 5. Построение рабочей зоны гидравлического экскаватора - крайние положения движения выпрямленной лопаты (максимальный размах), когда стрела находится
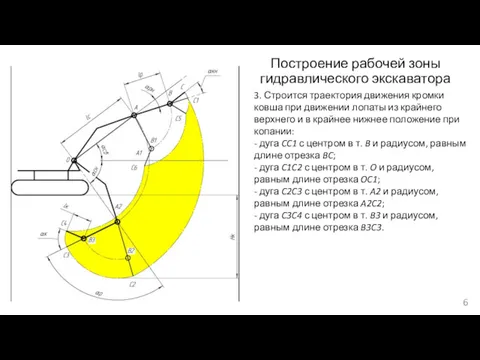
- 6. Построение рабочей зоны гидравлического экскаватора 3. Строится траектория движения кромки ковша при движении лопаты из крайнего
- 7. Построение рабочей зоны гидравлического экскаватора 4. Строится траектория движения кромки ковша при движении лопаты из крайнего
- 9. Скачать презентацию
Гидравлический экскаватор с обратной лопатой
1 - поворотная платформа; 2 - двигатель; 3 -
Гидравлический экскаватор с обратной лопатой
1 - поворотная платформа; 2 - двигатель; 3 -
Рабочая зона гидравлического экскаватора
αсн ≤ 52 ÷ 45° - угол опускания стрелы от
Рабочая зона гидравлического экскаватора
αсн ≤ 52 ÷ 45° - угол опускания стрелы от
Построение рабочей зоны гидравлического экскаватора
1. Отмечается место расположения шарнира крепления стрелы к экскаватору
Построение рабочей зоны гидравлического экскаватора
1. Отмечается место расположения шарнира крепления стрелы к экскаватору

Построение рабочей зоны гидравлического экскаватора
- крайние положения движения выпрямленной лопаты (максимальный размах), когда
Построение рабочей зоны гидравлического экскаватора
- крайние положения движения выпрямленной лопаты (максимальный размах), когда
Построение рабочей зоны гидравлического экскаватора
3. Строится траектория движения кромки ковша при движении лопаты
Построение рабочей зоны гидравлического экскаватора
3. Строится траектория движения кромки ковша при движении лопаты
Построение рабочей зоны гидравлического экскаватора
4. Строится траектория движения кромки ковша при движении лопаты
Построение рабочей зоны гидравлического экскаватора
4. Строится траектория движения кромки ковша при движении лопаты

Похожие презентации
 Сімвалы і вобразы ў беларускай народнай вышыўцы
Сімвалы і вобразы ў беларускай народнай вышыўцы Цветок из фоамирана
Цветок из фоамирана Презентация урока Выветривание горных пород
Презентация урока Выветривание горных пород Презентация Характеристика кламата России 8 класс
Презентация Характеристика кламата России 8 класс Технология стыковой сварки оплавлением. (Лекция 12)
Технология стыковой сварки оплавлением. (Лекция 12) Колбасные изделия
Колбасные изделия Археологические памятники презентация
Археологические памятники презентация Строительные материалы
Строительные материалы Карбоновые кислоты - презентация
Карбоновые кислоты - презентация Януш Корчак (Эрш Хенрик Гольдшмидт)
Януш Корчак (Эрш Хенрик Гольдшмидт) Мастер-класс. Квиллинг.
Мастер-класс. Квиллинг. Хамелеони
Хамелеони Презентация Самоуправление
Презентация Самоуправление Ситуация успеха на уроках математики как средство повышения качества образования.
Ситуация успеха на уроках математики как средство повышения качества образования. Горжусь своими земляками
Горжусь своими земляками Величини логічного типу, операції над ними
Величини логічного типу, операції над ними Олимпийское движение. Сочи - 2014 г
Олимпийское движение. Сочи - 2014 г Мал шаруашылығы негіздері. Қой шаруашылығы. Ешкі шаруашылығы
Мал шаруашылығы негіздері. Қой шаруашылығы. Ешкі шаруашылығы С днём рождения
С днём рождения Экологическая проблема в России загрязнение рек и озер
Экологическая проблема в России загрязнение рек и озер Средства, влияющие на эфферентную иннервацию
Средства, влияющие на эфферентную иннервацию Отчет работы по Гражданско- патриотическому воспитанию в средней группе.
Отчет работы по Гражданско- патриотическому воспитанию в средней группе. Стратегия организации: понятие, виды, функции, примеры
Стратегия организации: понятие, виды, функции, примеры Архитектура XVIII века в России
Архитектура XVIII века в России ПРЕЗЕНТАЦИЯ ФГТ И ФГОС
ПРЕЗЕНТАЦИЯ ФГТ И ФГОС
 Трудный диалог с учёбой, или как помочь своему ребёнку учиться
Трудный диалог с учёбой, или как помочь своему ребёнку учиться Планирование и выполнение рейса Сфакс-Савонна,
Планирование и выполнение рейса Сфакс-Савонна,