Исследование сверточных нейронных сетей на задаче обнаружения объектов на изображениях космической стыковки презентация
- Исследование сверточных нейронных сетей на задаче обнаружения объектов на изображениях космической стыковки

Содержание
- 2. Общая схема системы /18
- 3. Постановка задачи обнаружения объектов /18
- 4. Примеры различных искажений /18
- 5. Алгоритм обнаружения объектов /18
- 6. Постановка задачи Подготовить обучающий и тестовый наборы данных Выбрать нейросетевые системы обнаружения объектов Преобразовать обучающий и
- 7. Выбранные системы Faster R-CNN: Предположения о положении объектов генерируются специальной сетью, вся система работает на GPU,
- 8. Постановка задачи обучения нейронной сети /18
- 9. Описание набора данных: примеры вида различных узлов /18 Узел 1 Узел 2 Узел 3 Узел 4
- 10. Описание набора данных: вид второго узла с разного расстояния /18
- 11. Описание набора данных: количество изображений примеров /18
- 12. Задача сравнения результатов (1/2) /18
- 13. Задача сравнения результатов(2/2) /18
- 14. Сравнение результатов /18
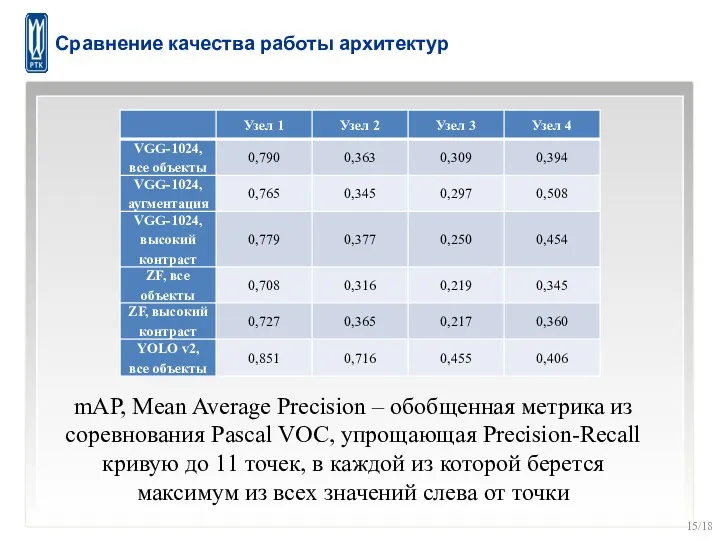
- 15. Сравнение качества работы архитектур /18 mAP, Mean Average Precision – обобщенная метрика из соревнования Pascal VOC,
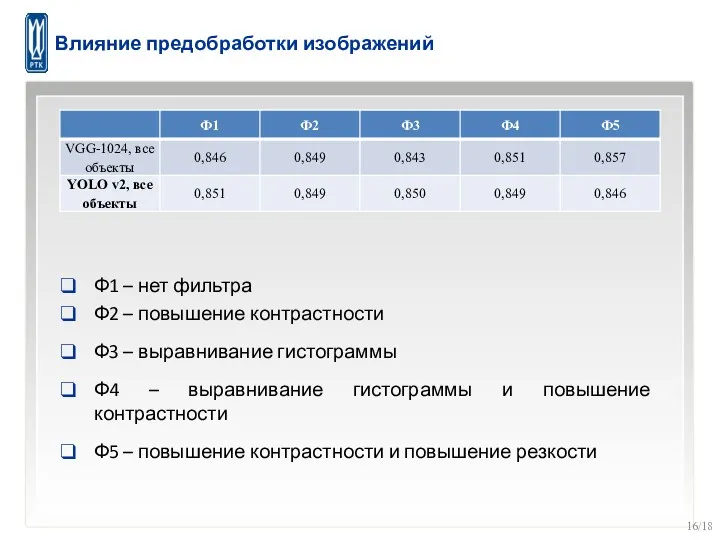
- 16. Влияние предобработки изображений /18 Ф1 – нет фильтра Ф2 – повышение контрастности Ф3 – выравнивание гистограммы
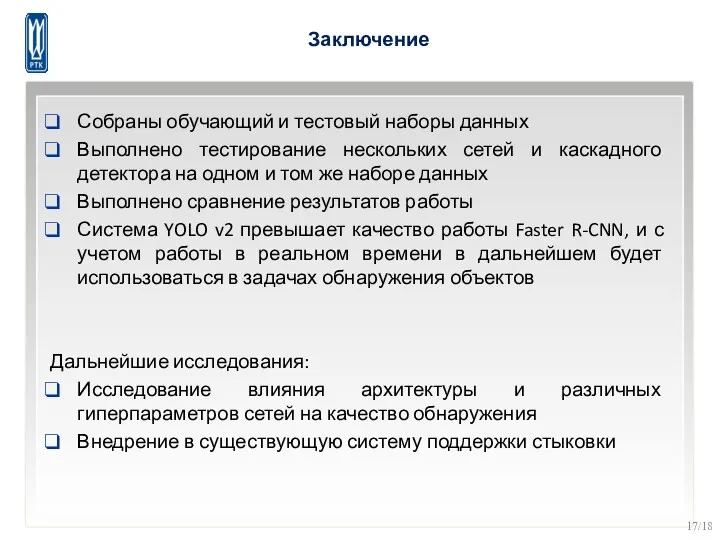
- 17. Заключение Собраны обучающий и тестовый наборы данных Выполнено тестирование нескольких сетей и каскадного детектора на одном
- 19. Скачать презентацию
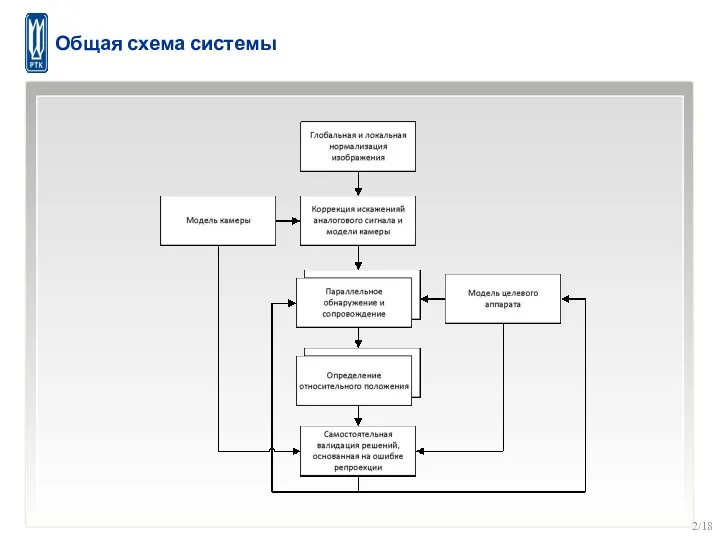
Общая схема системы
/18
Общая схема системы
/18
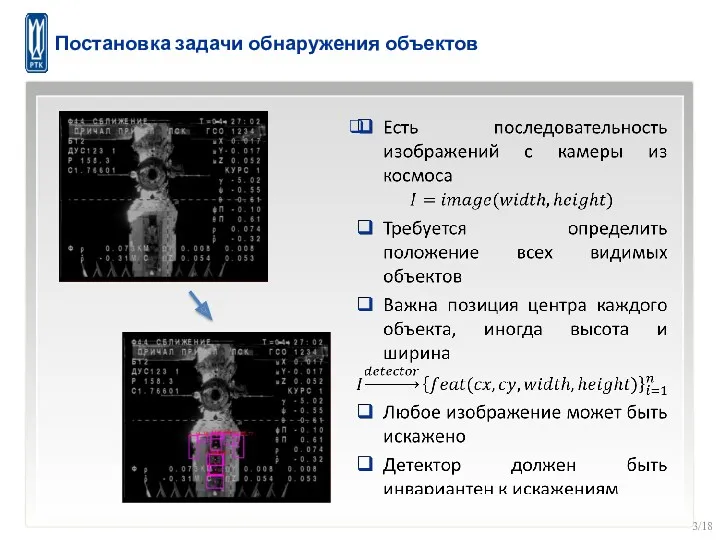
Постановка задачи обнаружения объектов
/18
Постановка задачи обнаружения объектов
/18

Примеры различных искажений
/18
Примеры различных искажений
/18

Алгоритм обнаружения объектов
/18
Алгоритм обнаружения объектов
/18
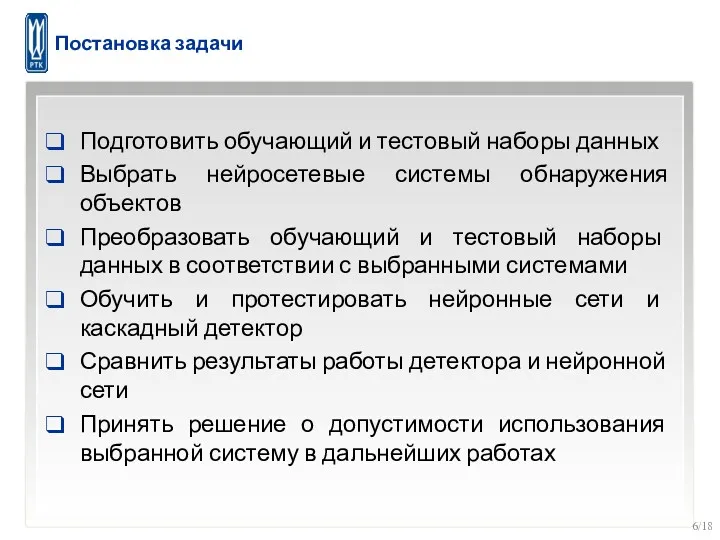
Постановка задачи
Подготовить обучающий и тестовый наборы данных
Выбрать нейросетевые системы обнаружения объектов
Преобразовать
Постановка задачи
Подготовить обучающий и тестовый наборы данных
Выбрать нейросетевые системы обнаружения объектов
Преобразовать
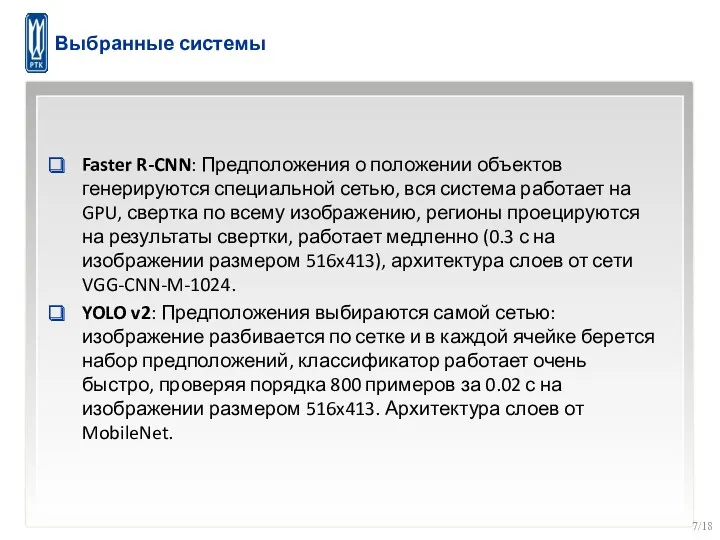
Выбранные системы
Faster R-CNN: Предположения о положении объектов генерируются специальной сетью, вся
Выбранные системы
Faster R-CNN: Предположения о положении объектов генерируются специальной сетью, вся
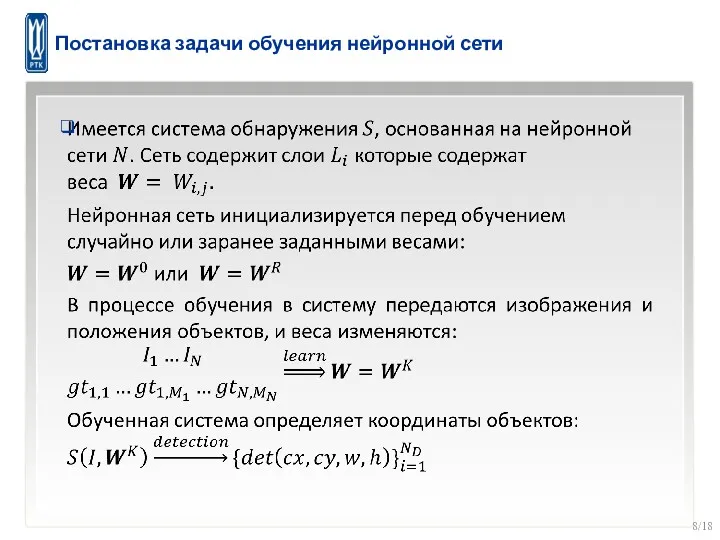
Постановка задачи обучения нейронной сети
/18
Постановка задачи обучения нейронной сети
/18

Описание набора данных: примеры вида различных узлов
/18
Узел 1
Узел 2
Узел 3
Узел 4
Описание набора данных: примеры вида различных узлов
/18
Узел 1
Узел 2
Узел 3
Узел 4

Описание набора данных: вид второго узла с разного расстояния
/18
Описание набора данных: вид второго узла с разного расстояния
/18

Описание набора данных: количество изображений примеров
/18
Описание набора данных: количество изображений примеров
/18
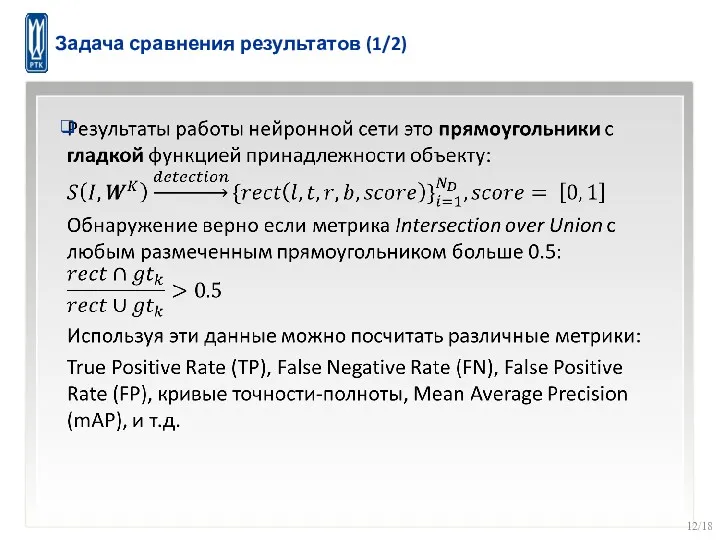
Задача сравнения результатов (1/2)
/18
Задача сравнения результатов (1/2)
/18
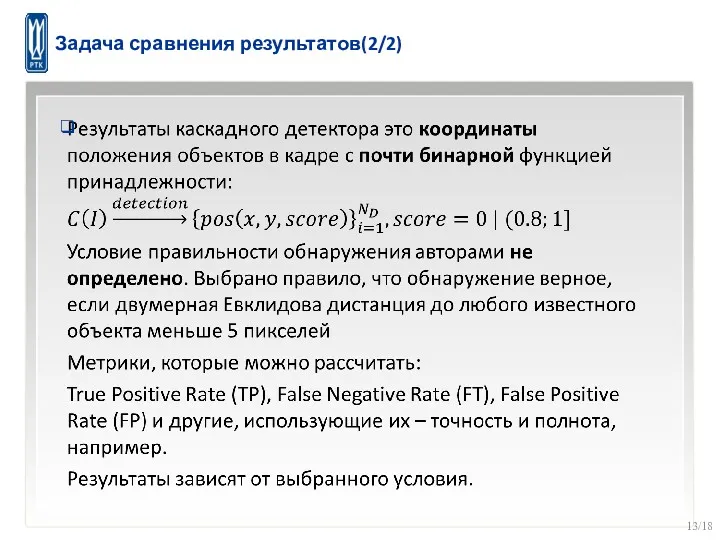
Задача сравнения результатов(2/2)
/18
Задача сравнения результатов(2/2)
/18
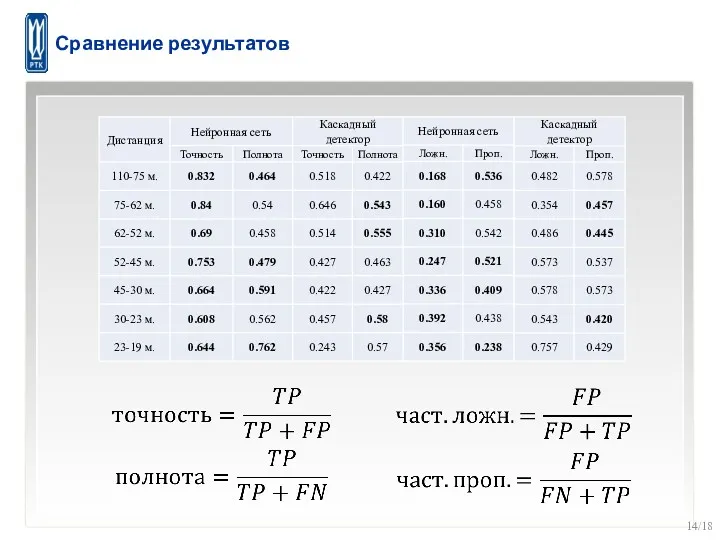
Сравнение результатов
/18
Сравнение результатов
/18
Сравнение качества работы архитектур
/18
mAP, Mean Average Precision – обобщенная метрика из
Сравнение качества работы архитектур
/18
mAP, Mean Average Precision – обобщенная метрика из
Влияние предобработки изображений
/18
Ф1 – нет фильтра
Ф2 – повышение контрастности
Ф3 – выравнивание
Влияние предобработки изображений
/18
Ф1 – нет фильтра
Ф2 – повышение контрастности
Ф3 – выравнивание
Заключение
Собраны обучающий и тестовый наборы данных
Выполнено тестирование нескольких сетей и каскадного
Заключение
Собраны обучающий и тестовый наборы данных
Выполнено тестирование нескольких сетей и каскадного
 Конструирование швейных изделий. Снятие мерок
Конструирование швейных изделий. Снятие мерок Стихотворения русских поэтов о Великой Отечественной войне. Урок внеклассного чтения
Стихотворения русских поэтов о Великой Отечественной войне. Урок внеклассного чтения Христианство как мировая религия
Христианство как мировая религия Итоги деятельности центра здоровья для детей
Итоги деятельности центра здоровья для детей Cтруктура автоматизированных электроприводов (АЭП). Способы пуска и торможения
Cтруктура автоматизированных электроприводов (АЭП). Способы пуска и торможения презентация мы здоровыми растем
презентация мы здоровыми растем Печальная улыбка Василия Шукшина
Печальная улыбка Василия Шукшина Проект Чистый родник
Проект Чистый родник Проект Молоко и его польза
Проект Молоко и его польза Шахматный педагог-2015
Шахматный педагог-2015 Назначение геофизических исследований скважин при геологическом изучении недр и добычи нефти и газа
Назначение геофизических исследований скважин при геологическом изучении недр и добычи нефти и газа Значення кожного з семи тижнів до Великодня
Значення кожного з семи тижнів до Великодня Презентация Как здоровье сохранить
Презентация Как здоровье сохранить Шибальба боги подземного царства майя
Шибальба боги подземного царства майя Изменения в правовом регулировании деятельности учреждений
Изменения в правовом регулировании деятельности учреждений Личность. Социализация
Личность. Социализация Презентация команды LatteOwl
Презентация команды LatteOwl Бифидобактерии и использование их в молочной промышленности
Бифидобактерии и использование их в молочной промышленности Инновации в промышленности
Инновации в промышленности Введение в теорию интеллектуальных информационных систем
Введение в теорию интеллектуальных информационных систем Измерение информации
Измерение информации Презентация: ПОКЛОНИМСЯ ВЕЛИКИМ ТЕМ ГОДАМ
Презентация: ПОКЛОНИМСЯ ВЕЛИКИМ ТЕМ ГОДАМ Технология 3 класс, техника квиллинга, Снежинка
Технология 3 класс, техника квиллинга, Снежинка Представление о красоте человека
Представление о красоте человека Классификация дефектов трубопровода. Тема 1
Классификация дефектов трубопровода. Тема 1 Презентация по географии для 6 класса по теме Литосфера
Презентация по географии для 6 класса по теме Литосфера Основные задачи РСЧС. Единая государственная система предупреждения и ликвидации чрезвычайных ситуаций
Основные задачи РСЧС. Единая государственная система предупреждения и ликвидации чрезвычайных ситуаций Памятник Коркыт ата
Памятник Коркыт ата