- Кегельринг. Робот на основе Lego Mindstorms

Содержание
- 2. Движение в круге Робот с датчиком освещенности движется в круге При наезде на черную линию робот
- 3. Движение в круге – модель робота Расположение датчика на борту робота Высота датчика над полем –
- 4. Движение в круге по звезде Робот движется до черной линии Затем возвращается в центр и делает
- 5. Изготовление кеглей Половина листа А4 белой бумаги Жестяная банка 0,33 л Двусторонний скотч Скотч наклеивается вертикально
- 6. Бампер для выталкивания кеглей Бампер защищает колеса, увеличивает охват Ширина бампера не менее колеи робота, но
- 7. Стабилизация движения по звезде При смене направления на черной линии необходимо плавное торможение Остановить моторы в
- 8. Точные движения по энкодеру Сброс (обнуление) энкодера в центре круга Возвращение в нулевое положение энкодера Поворот
- 9. Обнаружение кегли по датчику Вместо поворота по энкодеру можно ожидать появление кегли Датчик расстояния на 2
- 10. Как устроена команда ожидания? Команда ожидания «жди расстояние меньше 45» – это цикл с условием «жди
- 11. Как задать сложное условие? По правилам кегельринга робот должен остановиться, когда вытолкнет все кегли Чтобы робот
- 12. Как остановить основной цикл? Чтобы робот остановился, после контрольного поворота, в начале создайте цикл с условием
- 14. Скачать презентацию
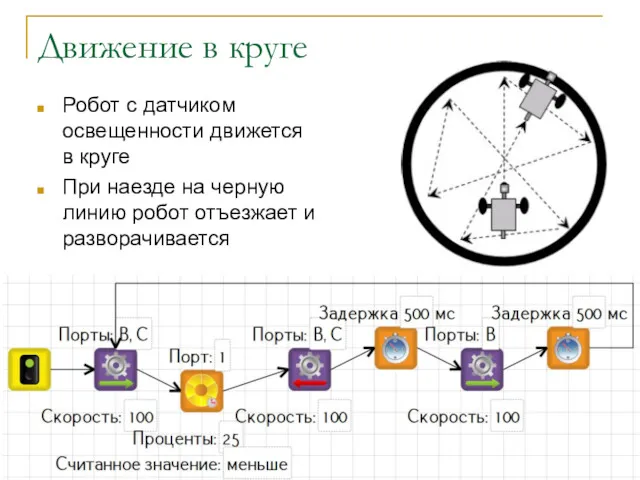
Движение в круге
Робот с датчиком освещенности движется в круге
При наезде на
Движение в круге
Робот с датчиком освещенности движется в круге
При наезде на
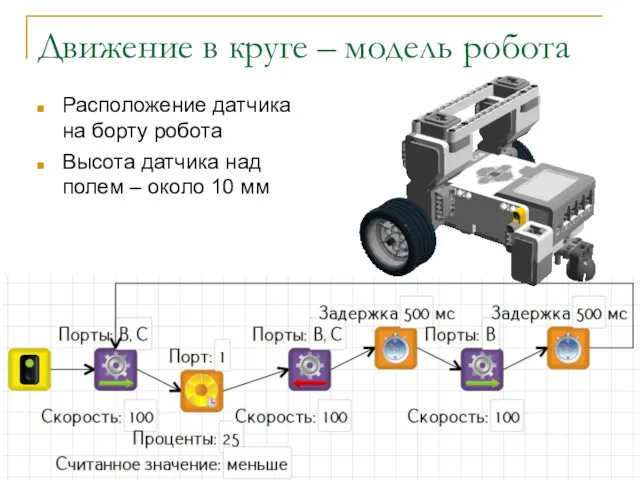
Движение в круге – модель робота
Расположение датчика на борту робота
Высота датчика
Движение в круге – модель робота
Расположение датчика на борту робота
Высота датчика
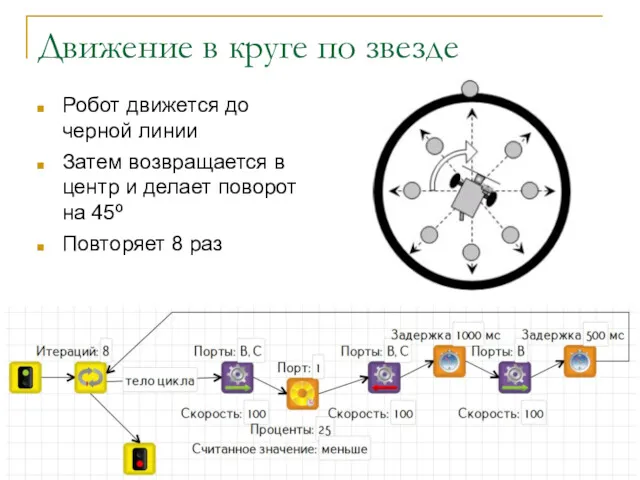
Движение в круге по звезде
Робот движется до черной линии
Затем возвращается в
Движение в круге по звезде
Робот движется до черной линии
Затем возвращается в

Изготовление кеглей
Половина листа А4 белой бумаги
Жестяная банка 0,33 л
Двусторонний скотч
Скотч наклеивается
Изготовление кеглей
Половина листа А4 белой бумаги
Жестяная банка 0,33 л
Двусторонний скотч
Скотч наклеивается

Бампер для выталкивания кеглей
Бампер защищает колеса, увеличивает охват
Ширина бампера не менее
Бампер для выталкивания кеглей
Бампер защищает колеса, увеличивает охват
Ширина бампера не менее
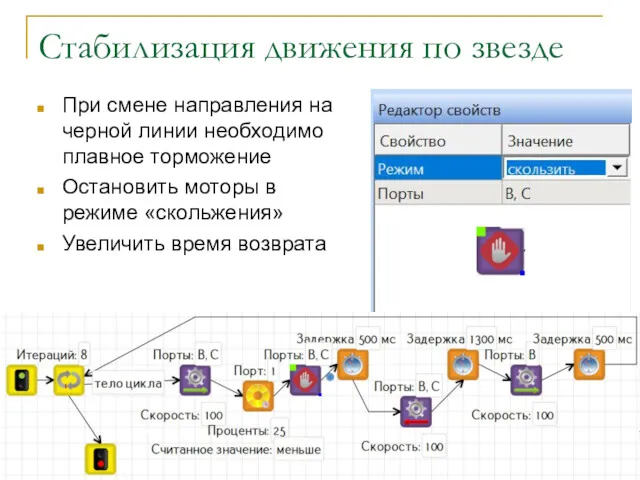
Стабилизация движения по звезде
При смене направления на черной линии необходимо плавное
Стабилизация движения по звезде
При смене направления на черной линии необходимо плавное
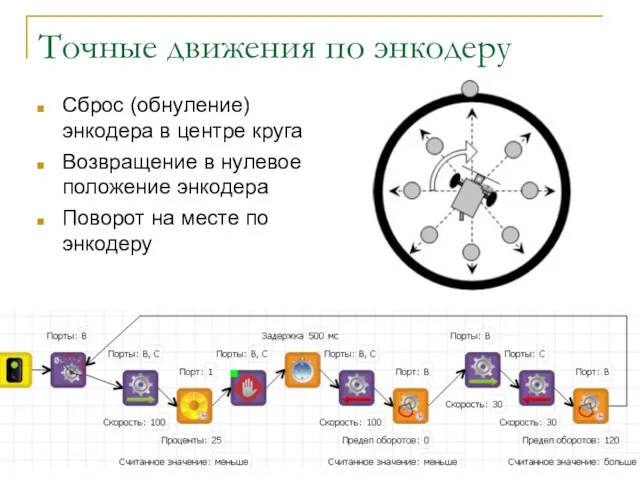
Точные движения по энкодеру
Сброс (обнуление) энкодера в центре круга
Возвращение в нулевое
Точные движения по энкодеру
Сброс (обнуление) энкодера в центре круга
Возвращение в нулевое

Обнаружение кегли по датчику
Вместо поворота по энкодеру можно ожидать появление кегли
Датчик
Обнаружение кегли по датчику
Вместо поворота по энкодеру можно ожидать появление кегли
Датчик
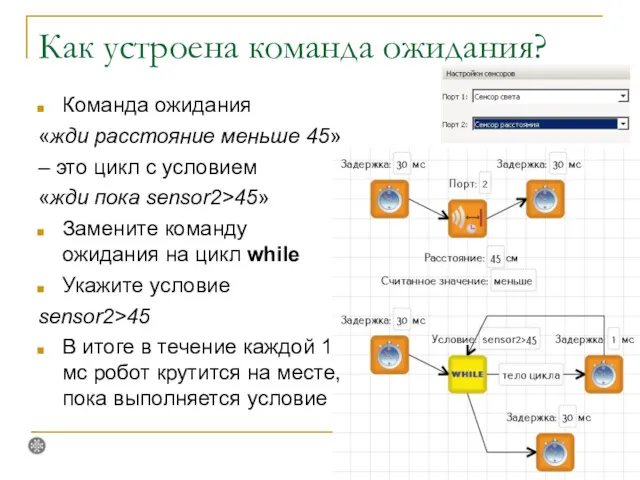
Как устроена команда ожидания?
Команда ожидания
«жди расстояние меньше 45»
– это цикл
Как устроена команда ожидания?
Команда ожидания
«жди расстояние меньше 45»
– это цикл
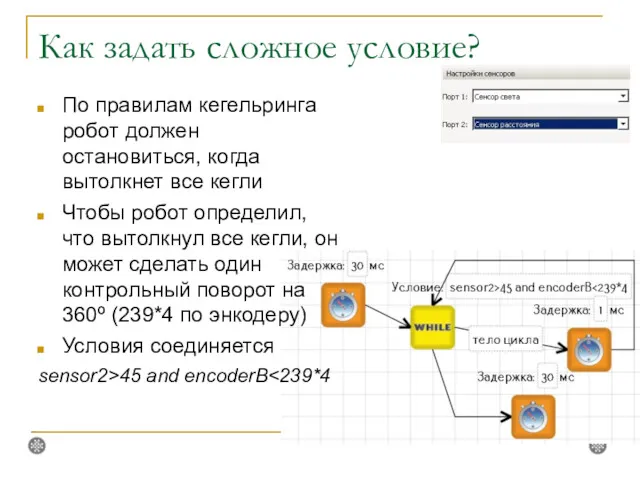
Как задать сложное условие?
По правилам кегельринга робот должен остановиться, когда вытолкнет
Как задать сложное условие?
По правилам кегельринга робот должен остановиться, когда вытолкнет
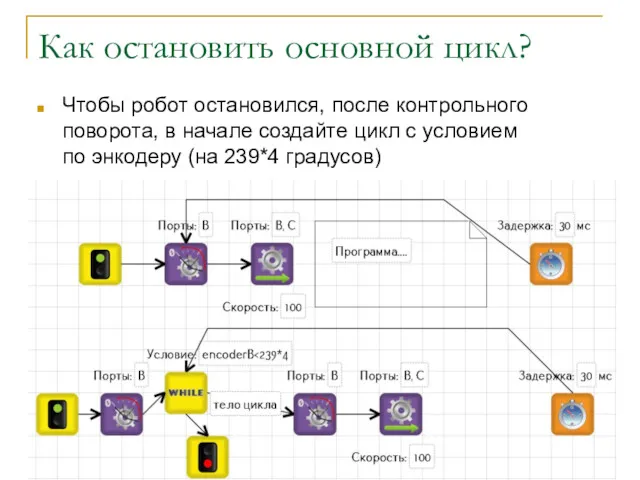
Как остановить основной цикл?
Чтобы робот остановился, после контрольного поворота, в начале
Как остановить основной цикл?
Чтобы робот остановился, после контрольного поворота, в начале
 Презентация к занятию Древняя Греция
Презентация к занятию Древняя Греция ОТКРЫТЫЙ УРОК ПО ХИМИИ АЛЮМИНИЙ
ОТКРЫТЫЙ УРОК ПО ХИМИИ АЛЮМИНИЙ Оформление рецептов
Оформление рецептов Разработка базы данных аэропорта Полёт
Разработка базы данных аэропорта Полёт Ортопедиялық стоматолгия клиникасында науқастарды тексеру және диагностикалаудың әдістері
Ортопедиялық стоматолгия клиникасында науқастарды тексеру және диагностикалаудың әдістері Способы добычи. Режимы разработки нефтегазовых пластов
Способы добычи. Режимы разработки нефтегазовых пластов презентация Бах_ОРГАННОЕ ТВОРЧЕСТВО
презентация Бах_ОРГАННОЕ ТВОРЧЕСТВО Алкендер
Алкендер Влияние тяжелых металлов на активность фермента каталазы
Влияние тяжелых металлов на активность фермента каталазы Кубанские казачие формирования
Кубанские казачие формирования презентация Мой город-Волгодонск
презентация Мой город-Волгодонск Процесс образования стружки
Процесс образования стружки Reasons to learning English
Reasons to learning English Воронежский заповедник
Воронежский заповедник Презентация кружка дополнительного образования Цветные ладошки.
Презентация кружка дополнительного образования Цветные ладошки. Свойства числовых неравенств
Свойства числовых неравенств Затланышсыз фигыльләр
Затланышсыз фигыльләр Das Deutschland und die Deutsche
Das Deutschland und die Deutsche Методы поиска идей / решений
Методы поиска идей / решений Прибыль и рентабельность
Прибыль и рентабельность Органы дыхания
Органы дыхания Направленное формирование личности в процессе физического воспитания
Направленное формирование личности в процессе физического воспитания Персонал предприятия как объект управления
Персонал предприятия как объект управления Презентация проекта Азбука дорожного движения
Презентация проекта Азбука дорожного движения Развитие спутниковых навигационных систем СРНС
Развитие спутниковых навигационных систем СРНС Предконцепция Променад-парка
Предконцепция Променад-парка 1С:Бухгалтерия государственного учреждения 8, редакция 2.0
1С:Бухгалтерия государственного учреждения 8, редакция 2.0 Halloween tongue twister
Halloween tongue twister