- Кинематика поступательного движения

Содержание
- 2. Раздел 1. Классическая механика Темы лекций Кинематика поступательного движения. Кинематика вращательного движения. Динамика поступательного движения. Динамика
- 3. Тема 1. Кинематика поступательного движения План лекции 1.1. Основные понятия кинематики 1.2. Перемещение, скорость, ускорение. 1.3.
- 4. 1.1. Основные понятия кинематики Механическое движение – это процесс перемещения тел или их частей относительно друг
- 5. Классическую механику создал И. Ньютон. Он постулировал, что время и пространство абсолютны. Абсолютное пространство и абсолютное
- 6. Абсолютное пространство - трехмерно (имеет три измерения), - непрерывно (его точки могут быть сколь угодно близки
- 7. Абсолютное время одномерно (имеет одно измерение); непрерывно (два его мгновения могут быть сколь угодно близки друг
- 8. В начале ХХ века классическая механика подверглась кардинальному пересмотру. В результате были созданы величайшие теории нашего
- 9. Теория относительности установила следующие положения о пространстве и времени. Пространство и время: - не являются самостоятельными
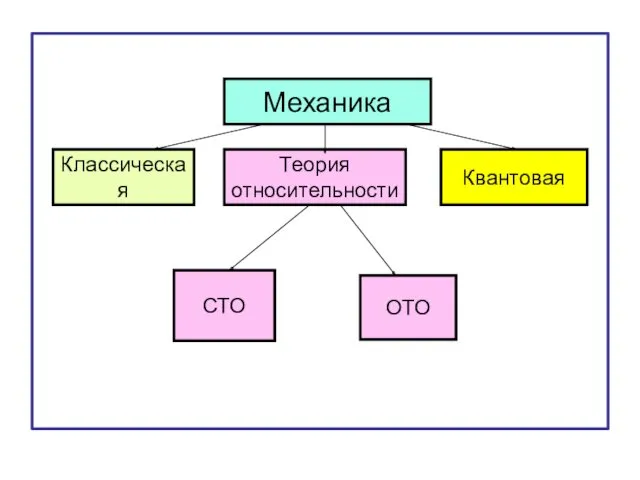
- 10. Механика Классическая Квантовая Теория относительности СТО ОТО
- 11. Классическая механика изучает макроскопические тела, движущиеся с малыми скоростями. Специальная теория относительности изучает макроскопические тела, движущиеся
- 12. Механика состоит из трех разделов – кинематики, динамики и статики. Кинематика изучает виды движений. Динамика изучает
- 13. Основные понятия механики Движение – изменение положения тел друг относительно друга. Тело отсчёта - тело, по
- 14. 1.2. Перемещение, скорость, ускорение Описать движение материальной точки – значит знать её положение относительно выбранной системы
- 15. Поступательным движением твёрдого тела называется движение, при котором любая прямая, проведённая в теле, остаётся параллельной самой
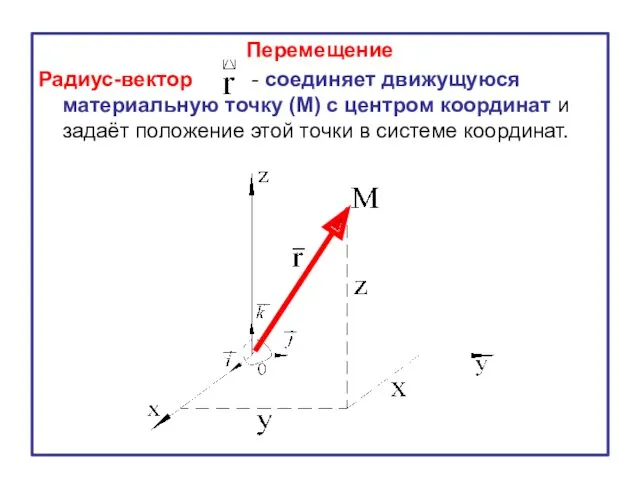
- 16. Перемещение Радиус-вектор - соединяет движущуюся материальную точку (М) с центром координат и задаёт положение этой точки
- 17. Спроецируем радиус-вектор на оси координат: орты осей Х,У,Z (единичные векторы направлений) Модуль радиус-вектора равен:
- 18. – проекции радиус-вектора на соответствующие оси. X, У, Z называются декартовыми координатами материальной точки.
- 19. Траекторией называется линия: которую описывает конец радиус-вектора материальной точки при её движении; по которой движется тело.
- 20. Законом движения материальной точки называется уравнение, выражающее зависимость её радиус-вектора от времени: Скалярная форма закона движения
- 21. Для конечных промежутков времени ∆t: Δt = t2 – t1 Вектор перемещения соединяет начальную и конечную
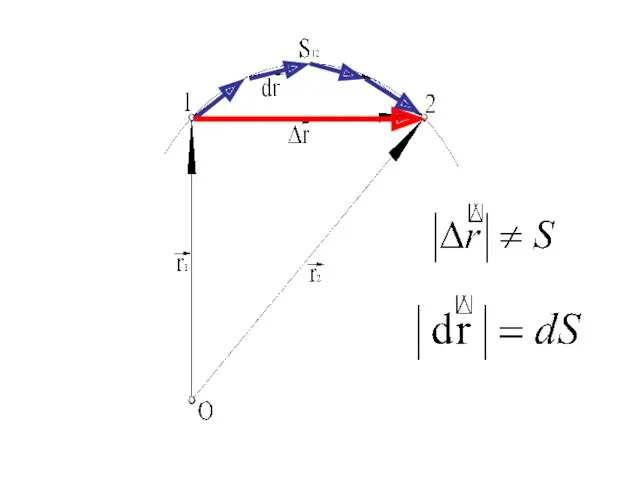
- 22. - приращение (изменение) радиус – вектора. Модуль вектора перемещения называется перемещением. Путь - расстояние (S12), пройденное
- 23. Для бесконечно малого промежутка времени dt: - вектор элементарного перемещения; - элементарное перемещение; dS - элементарный
- 25. Вектор перемещения получим, просуммировав векторы элементарных перемещений: Перемещение получим, просуммировав элементарные перемещения: Путь получим интегрированием (суммированием)
- 27. Скорость - равна перемещению, совершенному материальной точкой за единицу времени; характеризует быстроту изменения пространственного положения материальной
- 28. Вектор средней скорости за промежуток времени Δt: - определяется как - направлен вдоль вектора перемещения .
- 29. Модуль средней скорости определяется как S
- 30. При движении тела средняя скорость изменяет направление и величину.
- 31. Мгновенная скорость равна пределу, к которому стремится вектор средней скорости при неограниченном убывании промежутка времени до
- 32. Вектор мгновенной скорости направлен по вектору , т. е. по касательной к траектории. Модуль мгновенной скорости
- 33. Проекции скорости на координатные оси равны первым производным от соответствующих координат по времени:
- 34. Вектор мгновенной скорости и его модуль V через проекции скорости vx, vy, vz записываются как:
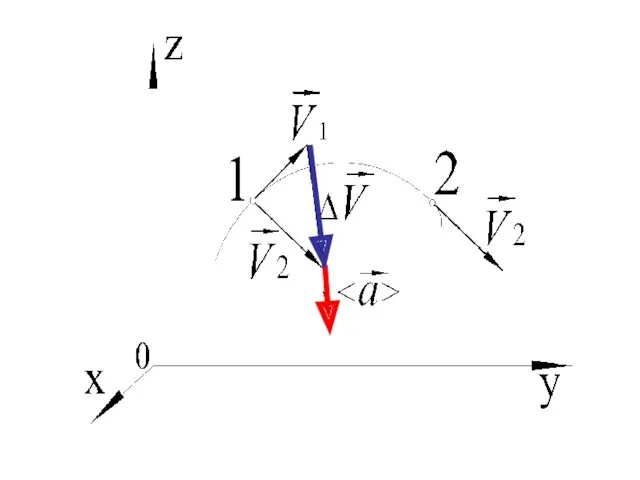
- 35. В процессе движения материальной точки модуль и направление её скорости в общем случае изменяются. 1 2
- 36. Ускорение - равно изменению скорости за единицу времени; - характеризует быстроту изменения скорости с течением времени;
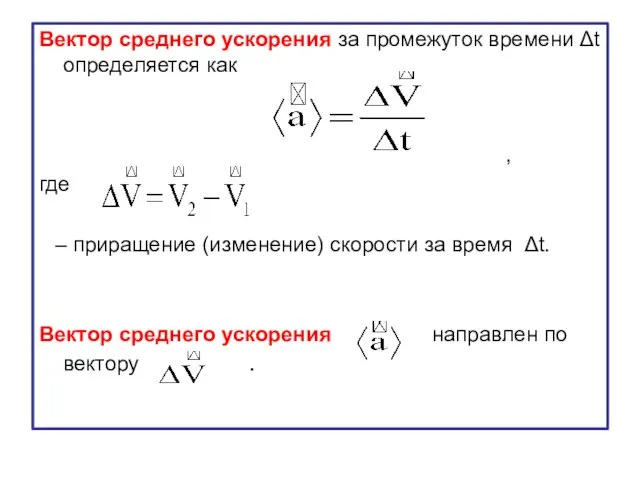
- 38. Вектор среднего ускорения за промежуток времени Δt определяется как , где – приращение (изменение) скорости за
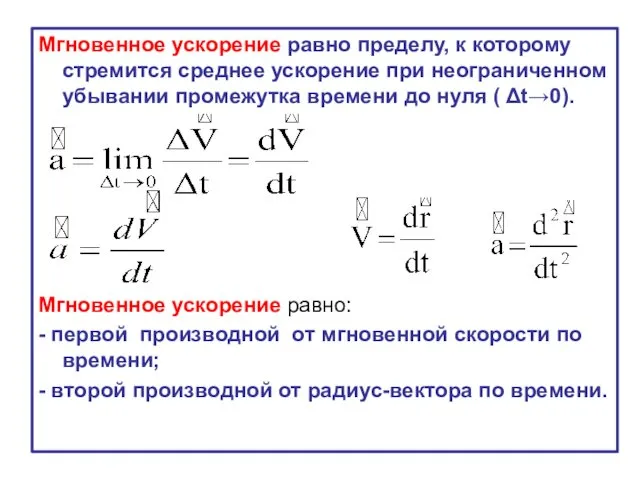
- 39. Мгновенное ускорение равно пределу, к которому стремится среднее ускорение при неограниченном убывании промежутка времени до нуля
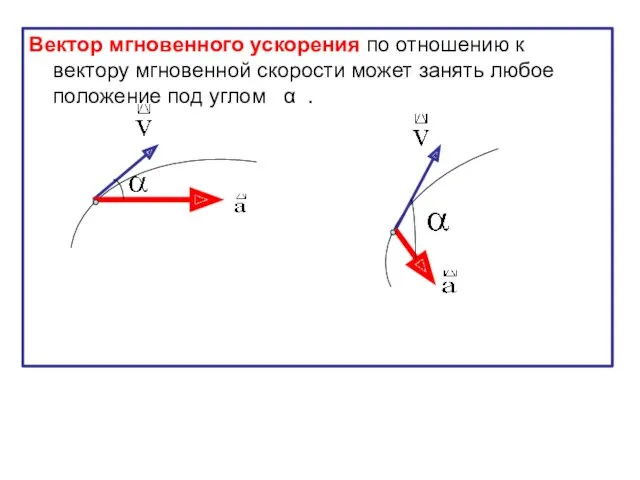
- 40. Вектор мгновенного ускорения по отношению к вектору мгновенной скорости может занять любое положение под углом α
- 41. Если угол - острый, то движение материальной точки будет являться ускоренным. В пределе острый угол равен
- 42. Проекции вектора ускорения на координатные оси равны первым производным от соответствующих проекций скорости на эти же
- 43. Вектор мгновенного ускорения и его модуль а через проекции можно записать как
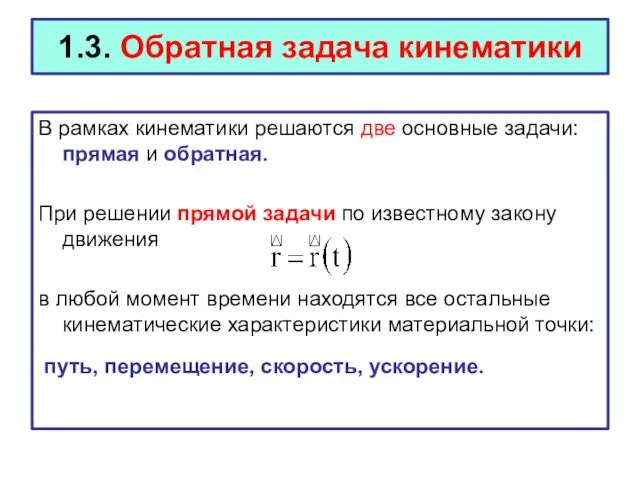
- 44. 1.3. Обратная задача кинематики В рамках кинематики решаются две основные задачи: прямая и обратная. При решении
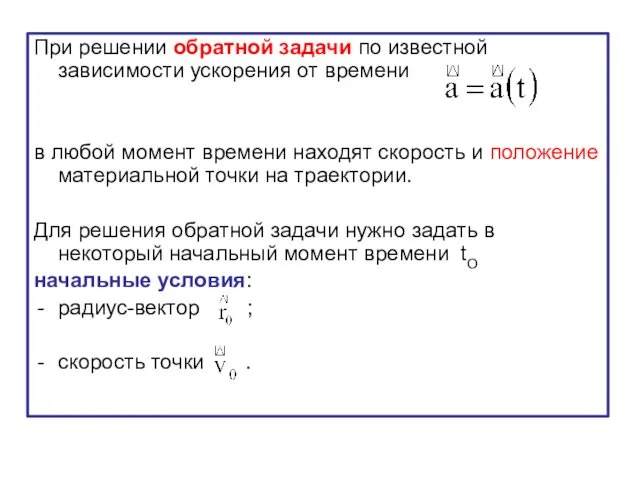
- 45. При решении обратной задачи по известной зависимости ускорения от времени в любой момент времени находят скорость
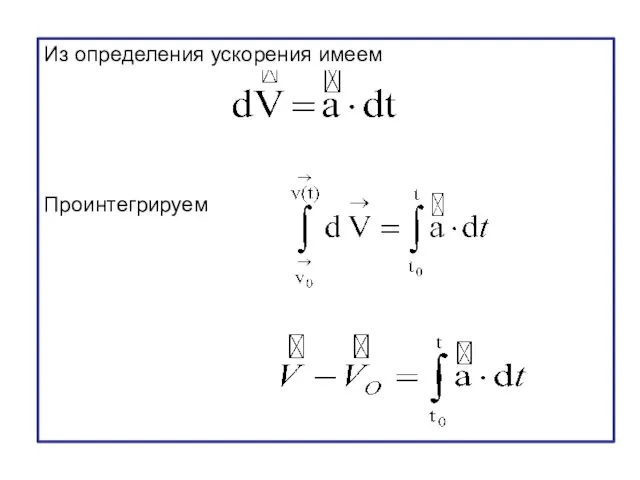
- 46. Из определения ускорения имеем Проинтегрируем
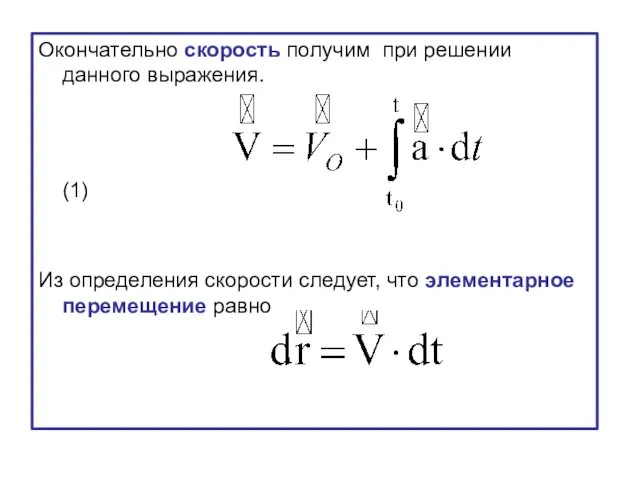
- 47. Окончательно скорость получим при решении данного выражения. (1) Из определения скорости следует, что элементарное перемещение равно
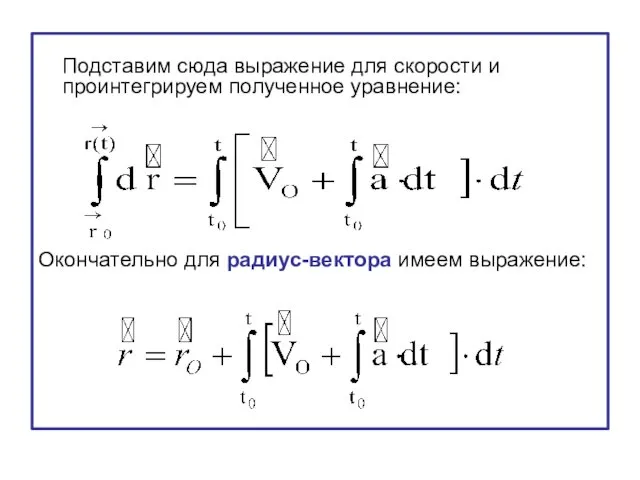
- 48. Подставим сюда выражение для скорости и проинтегрируем полученное уравнение: Окончательно для радиус-вектора имеем выражение:
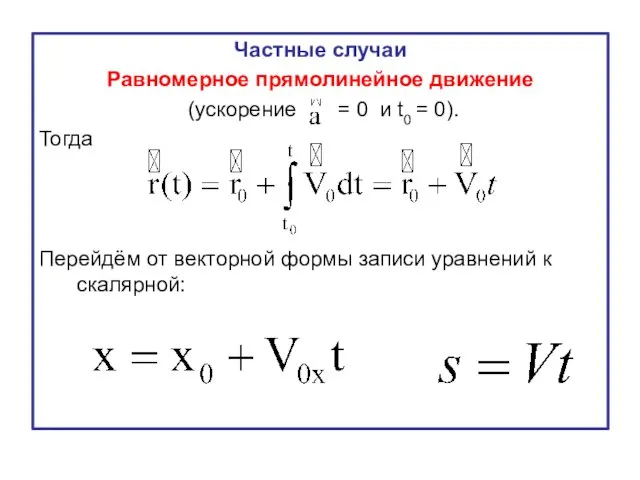
- 49. Частные случаи Равномерное прямолинейное движение (ускорение = 0 и t0 = 0). Тогда Перейдём от векторной
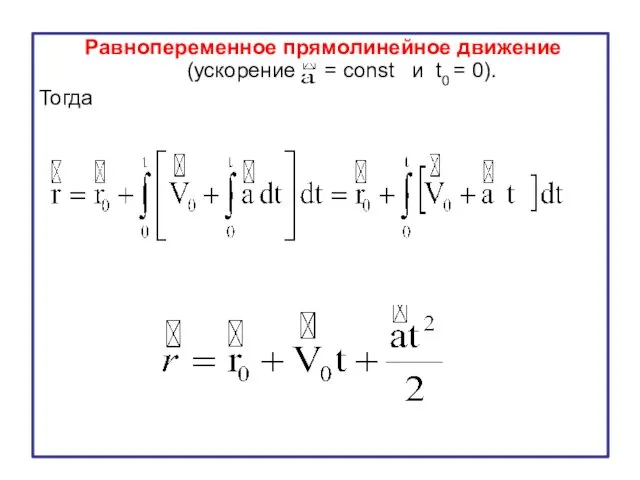
- 50. Равнопеременное прямолинейное движение (ускорение = const и t0 = 0). Тогда
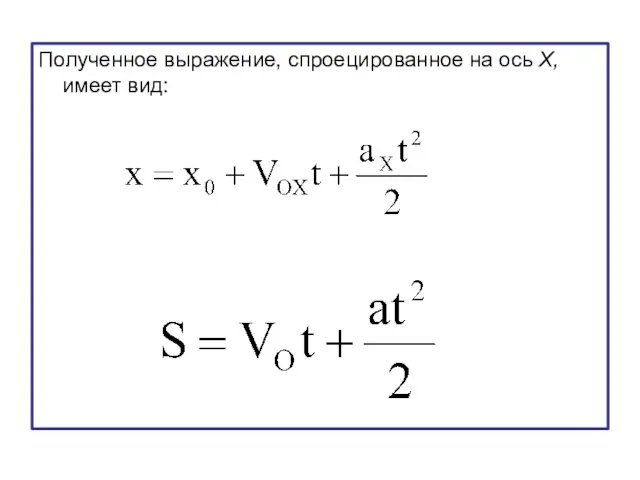
- 51. Полученное выражение, спроецированное на ось Х, имеет вид:
- 52. 1.4. Тангенциальное и нормальное ускорения Пусть материальная точка движется по криволинейной траектории, имея различную скорость в
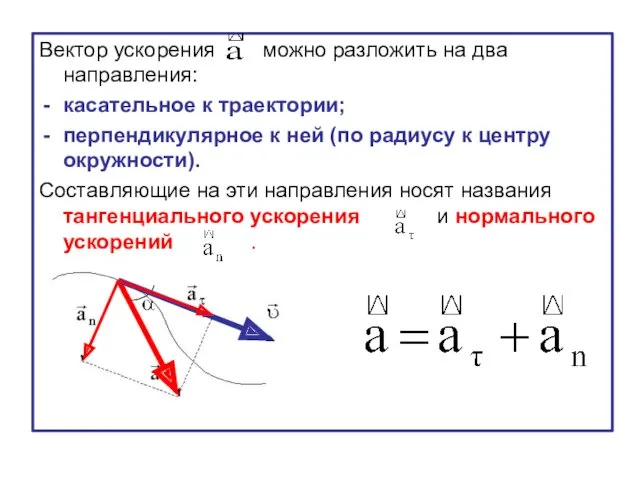
- 53. Вектор ускорения можно разложить на два направления: касательное к траектории; перпендикулярное к ней (по радиусу к
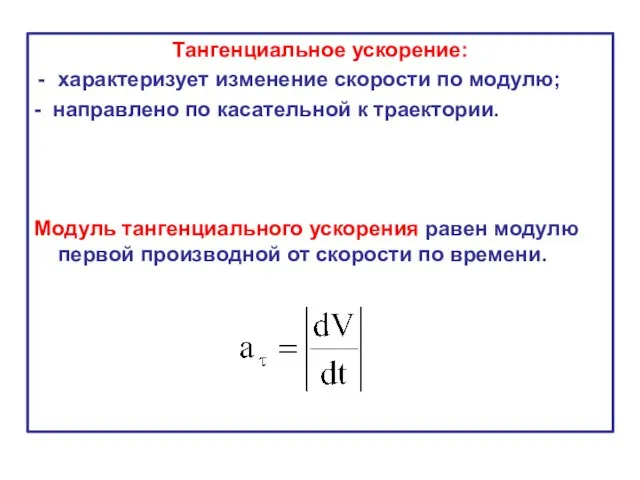
- 54. Тангенциальное ускорение: характеризует изменение скорости по модулю; - направлено по касательной к траектории. Модуль тангенциального ускорения
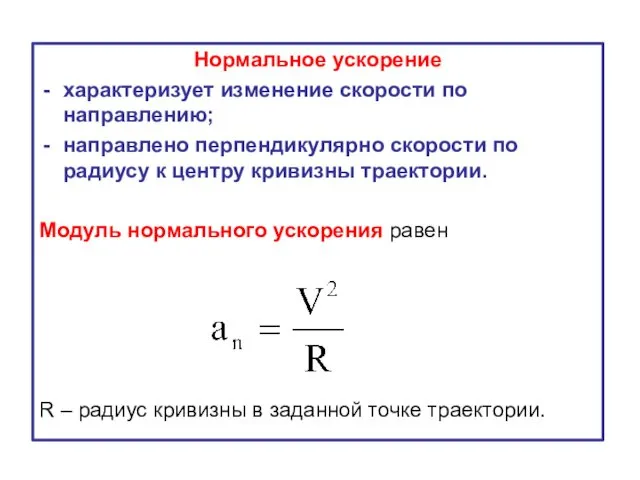
- 55. Нормальное ускорение характеризует изменение скорости по направлению; направлено перпендикулярно скорости по радиусу к центру кривизны траектории.
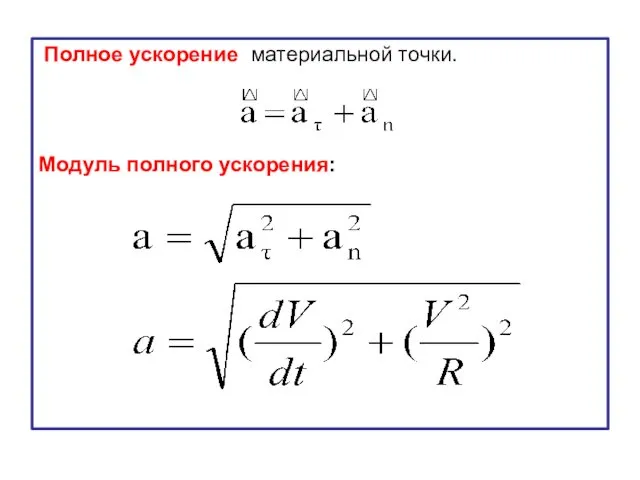
- 56. Полное ускорение материальной точки. Модуль полного ускорения:
- 58. Скачать презентацию
Раздел 1.
Классическая механика
Темы лекций
Кинематика поступательного движения.
Кинематика вращательного движения.
Динамика поступательного движения.
Динамика
Раздел 1.
Классическая механика
Темы лекций
Кинематика поступательного движения.
Кинематика вращательного движения.
Динамика поступательного движения.
Динамика
Тема 1. Кинематика поступательного движения
План лекции
1.1. Основные понятия кинематики
1.2. Перемещение, скорость,
Тема 1. Кинематика поступательного движения
План лекции
1.1. Основные понятия кинематики
1.2. Перемещение, скорость,
1.1. Основные понятия кинематики
Механическое движение – это процесс перемещения тел или
1.1. Основные понятия кинематики
Механическое движение – это процесс перемещения тел или
Классическую механику создал И. Ньютон.
Он постулировал, что время и пространство
Классическую механику создал И. Ньютон.
Он постулировал, что время и пространство
Абсолютное пространство
- трехмерно (имеет три измерения),
- непрерывно (его точки могут
Абсолютное пространство
- трехмерно (имеет три измерения),
- непрерывно (его точки могут
Абсолютное время
одномерно (имеет одно измерение);
непрерывно (два его мгновения могут
Абсолютное время
одномерно (имеет одно измерение);
непрерывно (два его мгновения могут
В начале ХХ века классическая механика подверглась кардинальному пересмотру.
В результате
В начале ХХ века классическая механика подверглась кардинальному пересмотру.
В результате
Теория относительности установила следующие положения о пространстве и времени.
Пространство и время:
-
Теория относительности установила следующие положения о пространстве и времени.
Пространство и время:
-
Механика
Классическая
Квантовая
Теория
относительности
СТО
ОТО
Механика
Классическая
Квантовая
Теория
относительности
СТО
ОТО
Классическая механика изучает макроскопические тела, движущиеся с малыми скоростями.
Специальная теория относительности
Классическая механика изучает макроскопические тела, движущиеся с малыми скоростями.
Специальная теория относительности
Механика состоит из трех разделов – кинематики, динамики и статики.
Кинематика изучает
Механика состоит из трех разделов – кинематики, динамики и статики.
Кинематика изучает
Основные понятия механики
Движение – изменение положения тел друг относительно друга.
Тело отсчёта
Основные понятия механики
Движение – изменение положения тел друг относительно друга.
Тело отсчёта
1.2. Перемещение, скорость, ускорение
Описать движение материальной точки – значит знать её
1.2. Перемещение, скорость, ускорение
Описать движение материальной точки – значит знать её
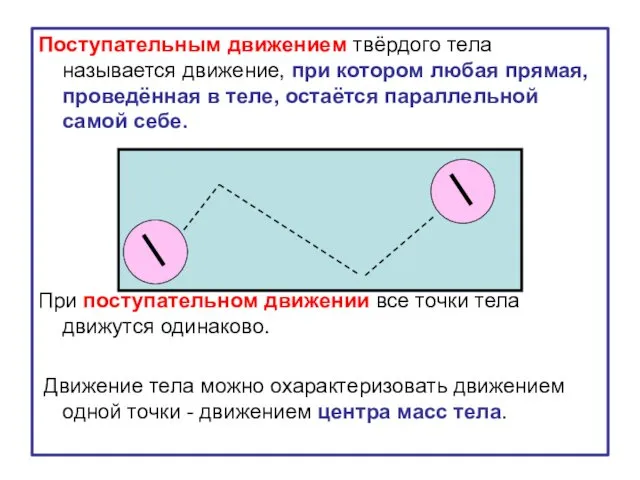
Поступательным движением твёрдого тела называется движение, при котором любая прямая, проведённая
Поступательным движением твёрдого тела называется движение, при котором любая прямая, проведённая
Перемещение
Радиус-вектор - соединяет движущуюся материальную точку (М) с центром координат и
Перемещение
Радиус-вектор - соединяет движущуюся материальную точку (М) с центром координат и
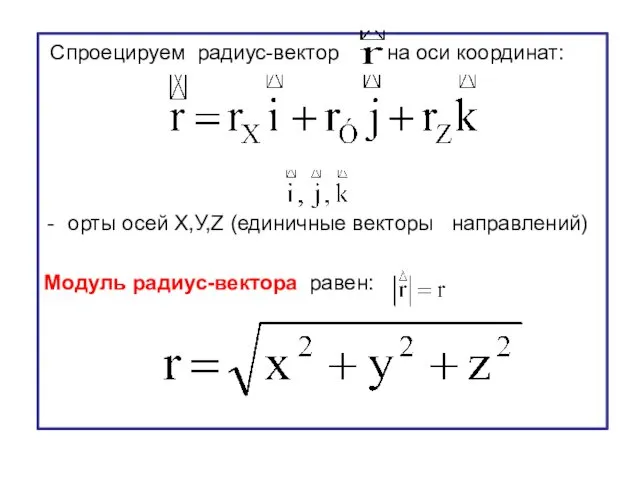
Спроецируем радиус-вектор на оси координат:
орты осей Х,У,Z (единичные векторы направлений)
Модуль
Спроецируем радиус-вектор на оси координат:
орты осей Х,У,Z (единичные векторы направлений)
Модуль
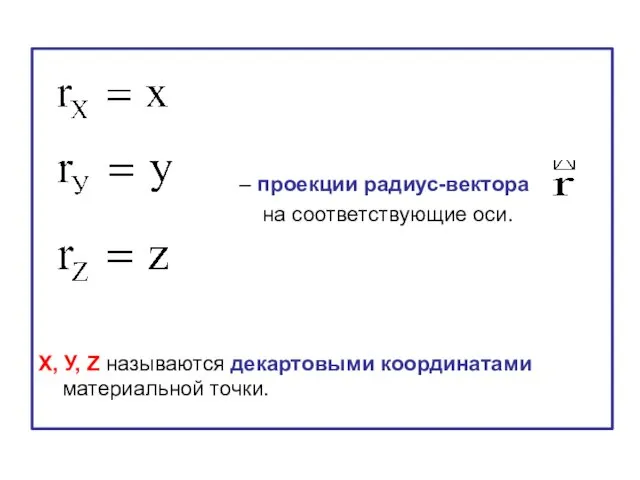
– проекции радиус-вектора
на соответствующие оси.
X, У, Z
– проекции радиус-вектора
на соответствующие оси.
X, У, Z
Траекторией называется линия:
которую описывает конец радиус-вектора материальной точки при её движении;
по
Траекторией называется линия:
которую описывает конец радиус-вектора материальной точки при её движении;
по
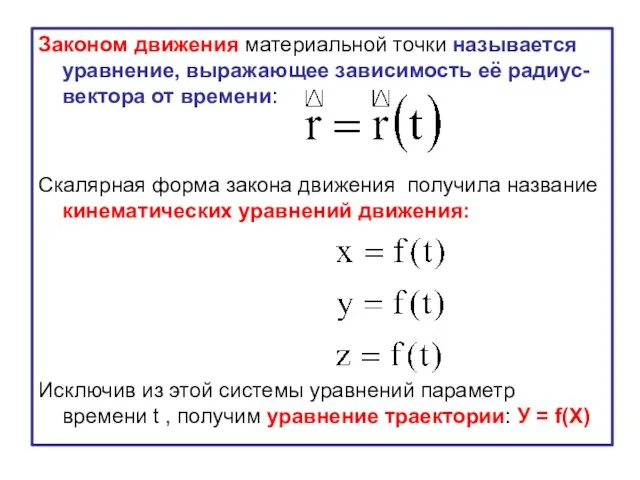
Законом движения материальной точки называется уравнение, выражающее зависимость её радиус-вектора от
Законом движения материальной точки называется уравнение, выражающее зависимость её радиус-вектора от
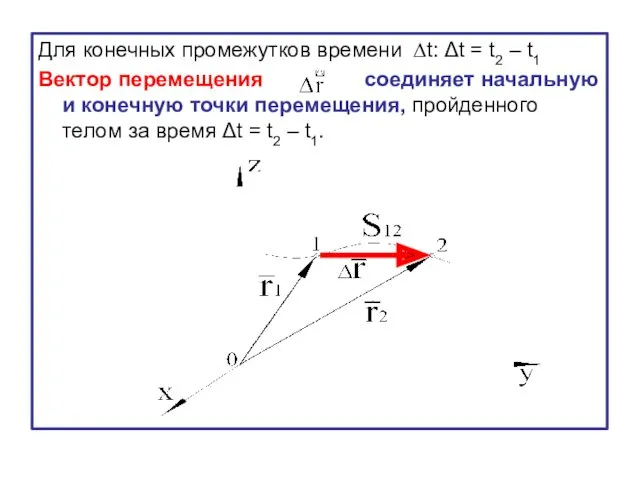
Для конечных промежутков времени ∆t: Δt = t2 – t1
Вектор перемещения
Для конечных промежутков времени ∆t: Δt = t2 – t1
Вектор перемещения
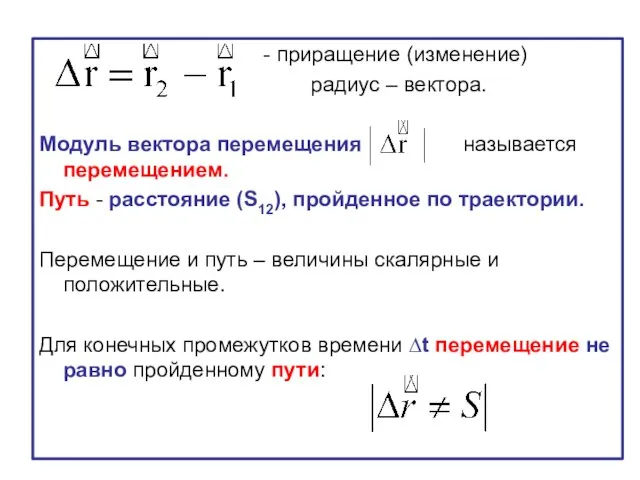
- приращение (изменение)
радиус – вектора.
Модуль вектора перемещения называется перемещением.
Путь
- приращение (изменение)
радиус – вектора.
Модуль вектора перемещения называется перемещением.
Путь
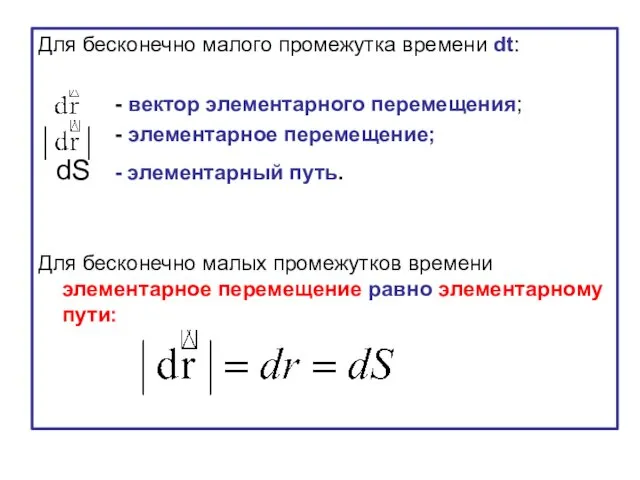
Для бесконечно малого промежутка времени dt:
- вектор элементарного перемещения;
-
Для бесконечно малого промежутка времени dt:
- вектор элементарного перемещения;
-

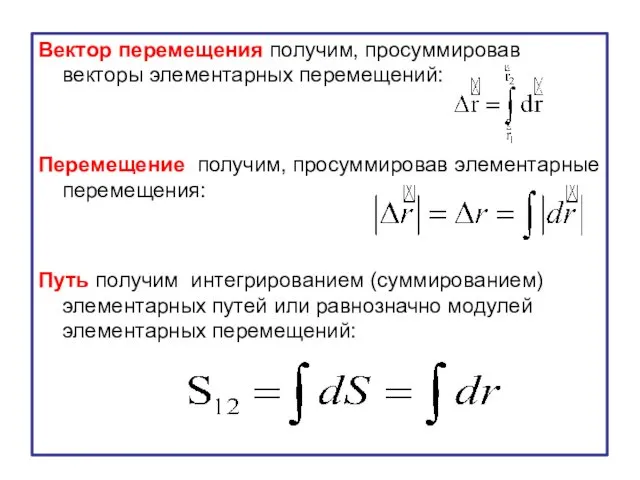
Вектор перемещения получим, просуммировав векторы элементарных перемещений:
Перемещение получим, просуммировав элементарные перемещения:
Вектор перемещения получим, просуммировав векторы элементарных перемещений:
Перемещение получим, просуммировав элементарные перемещения:

Скорость
- равна перемещению, совершенному материальной точкой за единицу времени;
характеризует быстроту изменения
Скорость
- равна перемещению, совершенному материальной точкой за единицу времени;
характеризует быстроту изменения
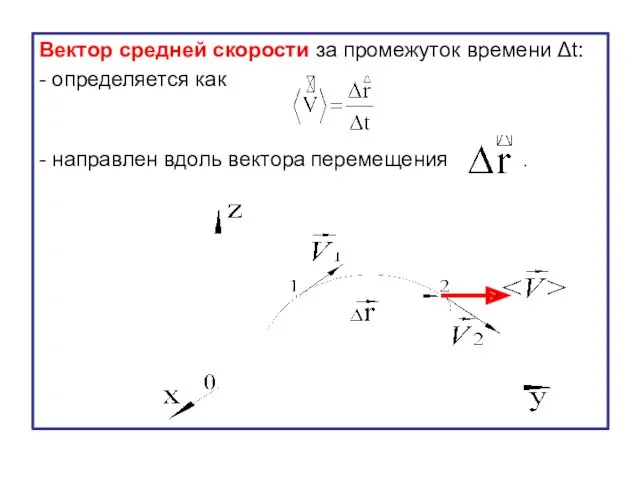
Вектор средней скорости за промежуток времени Δt:
- определяется как
- направлен вдоль
Вектор средней скорости за промежуток времени Δt:
- определяется как
- направлен вдоль
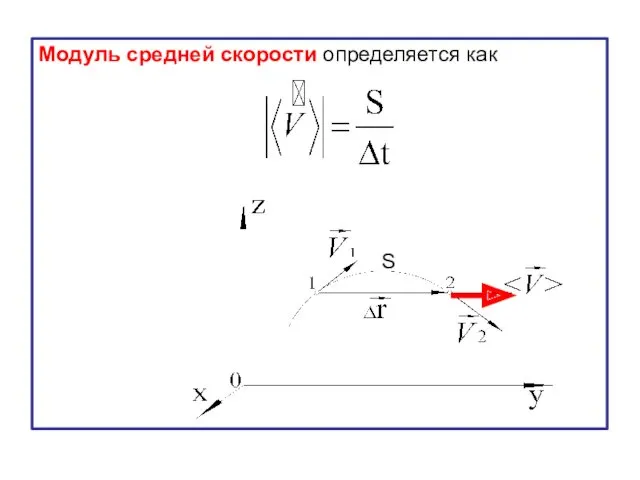
Модуль средней скорости определяется как
S
Модуль средней скорости определяется как
S

При движении тела средняя скорость изменяет направление и величину.
При движении тела средняя скорость изменяет направление и величину.
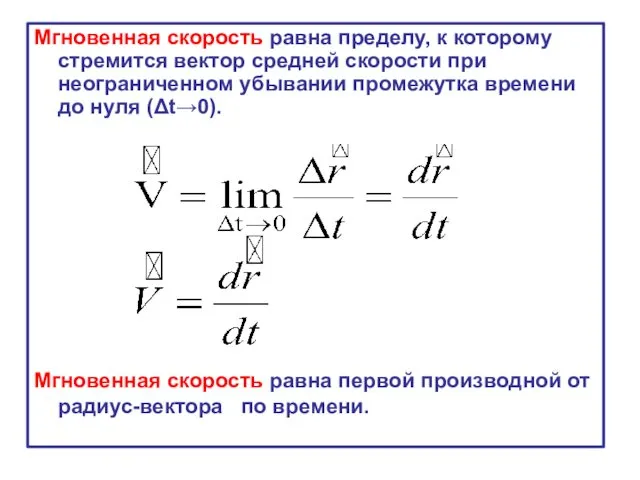
Мгновенная скорость равна пределу, к которому стремится вектор средней скорости при
Мгновенная скорость равна пределу, к которому стремится вектор средней скорости при
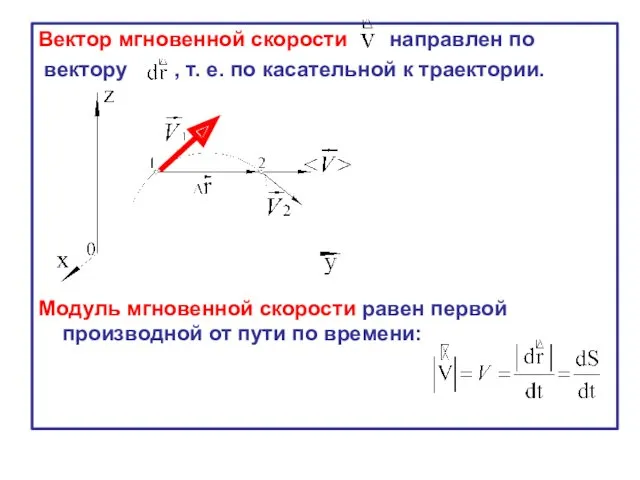
Вектор мгновенной скорости направлен по
вектору , т. е. по касательной
Вектор мгновенной скорости направлен по
вектору , т. е. по касательной
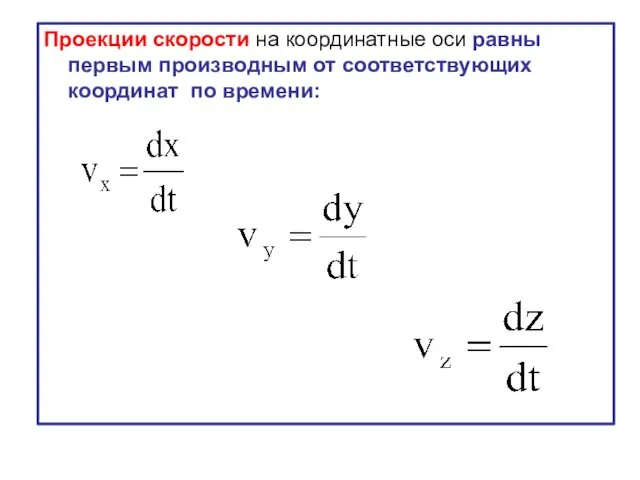
Проекции скорости на координатные оси равны первым производным от соответствующих координат
Проекции скорости на координатные оси равны первым производным от соответствующих координат
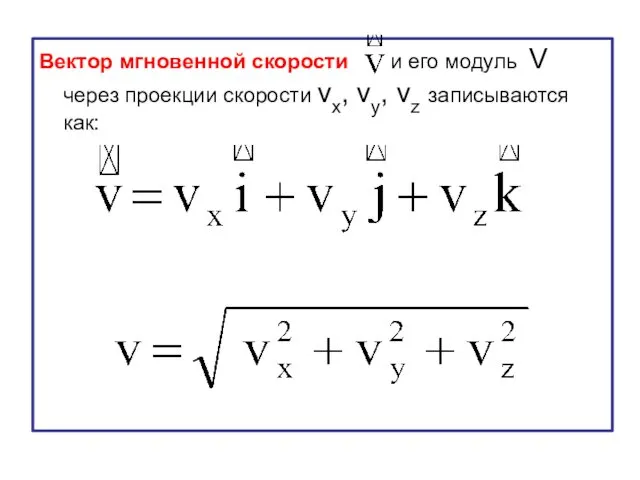
Вектор мгновенной скорости и его модуль V через проекции скорости vx,
Вектор мгновенной скорости и его модуль V через проекции скорости vx,
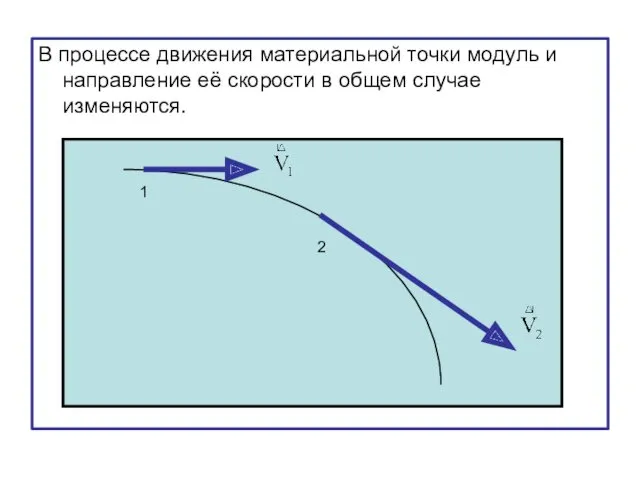
В процессе движения материальной точки модуль и направление её скорости в
В процессе движения материальной точки модуль и направление её скорости в
Ускорение
- равно изменению скорости за единицу времени;
- характеризует быстроту изменения скорости
Ускорение
- равно изменению скорости за единицу времени;
- характеризует быстроту изменения скорости
Вектор среднего ускорения за промежуток времени Δt определяется как
,
где
– приращение
Вектор среднего ускорения за промежуток времени Δt определяется как
,
где
– приращение
Мгновенное ускорение равно пределу, к которому стремится среднее ускорение при неограниченном
Мгновенное ускорение равно пределу, к которому стремится среднее ускорение при неограниченном
Вектор мгновенного ускорения по отношению к вектору мгновенной скорости может занять
Вектор мгновенного ускорения по отношению к вектору мгновенной скорости может занять
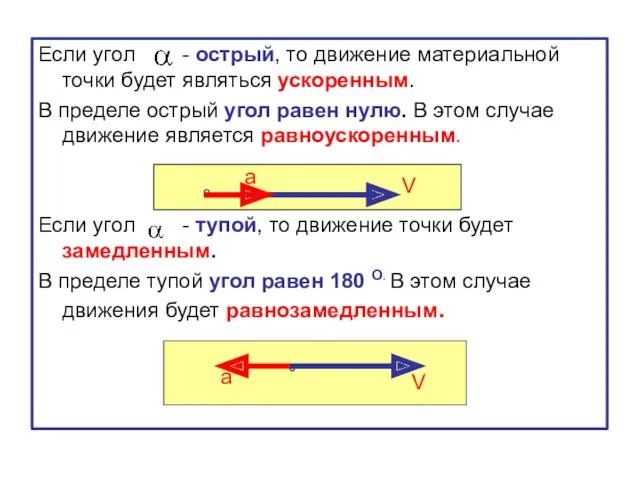
Если угол - острый, то движение материальной точки будет являться ускоренным.
Если угол - острый, то движение материальной точки будет являться ускоренным.
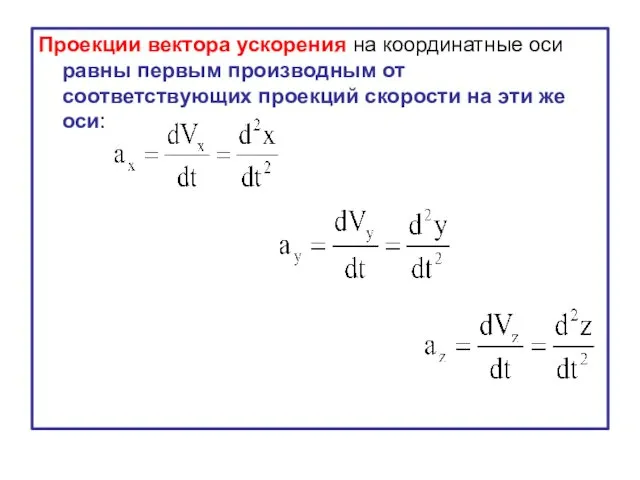
Проекции вектора ускорения на координатные оси равны первым производным от соответствующих
Проекции вектора ускорения на координатные оси равны первым производным от соответствующих
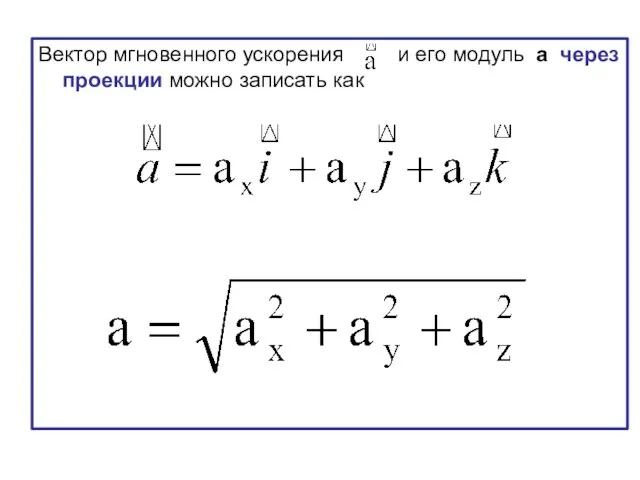
Вектор мгновенного ускорения и его модуль а через проекции можно записать
Вектор мгновенного ускорения и его модуль а через проекции можно записать
1.3. Обратная задача кинематики
В рамках кинематики решаются две основные задачи: прямая
1.3. Обратная задача кинематики
В рамках кинематики решаются две основные задачи: прямая
При решении обратной задачи по известной зависимости ускорения от времени
в
При решении обратной задачи по известной зависимости ускорения от времени
в
Из определения ускорения имеем
Проинтегрируем
Из определения ускорения имеем
Проинтегрируем
Окончательно скорость получим при решении данного выражения.
(1)
Из определения скорости следует, что
Окончательно скорость получим при решении данного выражения.
(1)
Из определения скорости следует, что
Подставим сюда выражение для скорости и проинтегрируем полученное уравнение:
Окончательно для
Подставим сюда выражение для скорости и проинтегрируем полученное уравнение:
Окончательно для
Частные случаи
Равномерное прямолинейное движение
(ускорение = 0 и t0 = 0).
Тогда
Перейдём
Частные случаи
Равномерное прямолинейное движение
(ускорение = 0 и t0 = 0).
Тогда
Перейдём
Равнопеременное прямолинейное движение (ускорение = const и t0 = 0).
Тогда
Равнопеременное прямолинейное движение (ускорение = const и t0 = 0).
Тогда
Полученное выражение, спроецированное на ось Х, имеет вид:
Полученное выражение, спроецированное на ось Х, имеет вид:
1.4. Тангенциальное и нормальное ускорения
Пусть материальная точка движется по криволинейной траектории,
1.4. Тангенциальное и нормальное ускорения
Пусть материальная точка движется по криволинейной траектории,
Вектор ускорения можно разложить на два направления:
касательное к траектории;
перпендикулярное к
Вектор ускорения можно разложить на два направления:
касательное к траектории;
перпендикулярное к
Тангенциальное ускорение:
характеризует изменение скорости по модулю;
- направлено по касательной к траектории.
Модуль
Тангенциальное ускорение:
характеризует изменение скорости по модулю;
- направлено по касательной к траектории.
Модуль
Нормальное ускорение
характеризует изменение скорости по направлению;
направлено перпендикулярно скорости по радиусу
Нормальное ускорение
характеризует изменение скорости по направлению;
направлено перпендикулярно скорости по радиусу
Полное ускорение материальной точки.
Модуль полного ускорения:
Полное ускорение материальной точки.
Модуль полного ускорения:
 Нарушение водно - солевого обмена
Нарушение водно - солевого обмена Доклад-презентация Бумажная страна
Доклад-презентация Бумажная страна Открытое внеклассное занятие Журавлик, машущий крыльями
Открытое внеклассное занятие Журавлик, машущий крыльями Музыка Возрождения (XV-XVI вв.)
Музыка Возрождения (XV-XVI вв.) Религиозные объединения и организации в РФ
Религиозные объединения и организации в РФ Цифровые системы передачи мультимедийной информации
Цифровые системы передачи мультимедийной информации Народы Якутии
Народы Якутии Водные богатства
Водные богатства Аналіз діяльності транснаціональної корпорації Toyota Motor Corporation
Аналіз діяльності транснаціональної корпорації Toyota Motor Corporation Технические параметры для ремонта помещения
Технические параметры для ремонта помещения презентация Нобелевские лауреаты
презентация Нобелевские лауреаты Умножение десятичных дробей на натуральные числа
Умножение десятичных дробей на натуральные числа Отрезок. Длина отрезка
Отрезок. Длина отрезка Применение интерактивных объектов при формировании знаний и умений учащихся.
Применение интерактивных объектов при формировании знаний и умений учащихся. Мини-музей Золотое кольцо России
Мини-музей Золотое кольцо России Поздравление с праздником
Поздравление с праздником Делегаты. (Лекция 10)
Делегаты. (Лекция 10) Проецирование плоскости
Проецирование плоскости Отработка мощных калийных пластов с селективным извлечением сильвинитовых слоёв
Отработка мощных калийных пластов с селективным извлечением сильвинитовых слоёв производство серной кислоты
производство серной кислоты Селекция животных и растений
Селекция животных и растений География черной металлургии
География черной металлургии Структура химического знания
Структура химического знания Раздел Портфолио 3,4
Раздел Портфолио 3,4 Накорми собаку. Игра- тренажёр. 1 класс
Накорми собаку. Игра- тренажёр. 1 класс Вред курения
Вред курения Без имени 1
Без имени 1 roi-l-53928-can-you-oral-language-powerpoint
roi-l-53928-can-you-oral-language-powerpoint