- Классификация электрических машин

Содержание
- 2. Классификация электрических машин Генераторы преобразуют механическую энергию в электрическую посредством ЭМ-поля Двигатели преобразуют электрическую энергию в
- 3. Три основных закона электромеханики Преобразование энергии осуществляется с коэффициентом полезного действия (кпд) меньше 1 Σp —
- 4. Электрические двигатели и генераторы обратимы: одна и та же электрическая машина при наличии ЭМ-поля может работать
- 5. Асинхронные машины (двигатели)
- 6. Асинхронные двигатели с короткозамкнутым ротором примерно 90% всех двигателей
- 7. Создатели асинхронного двигателя М.О. Доливо-Добровольский Никола Тесла 1888 г. 1888 г. 1889 г. 1890 г.
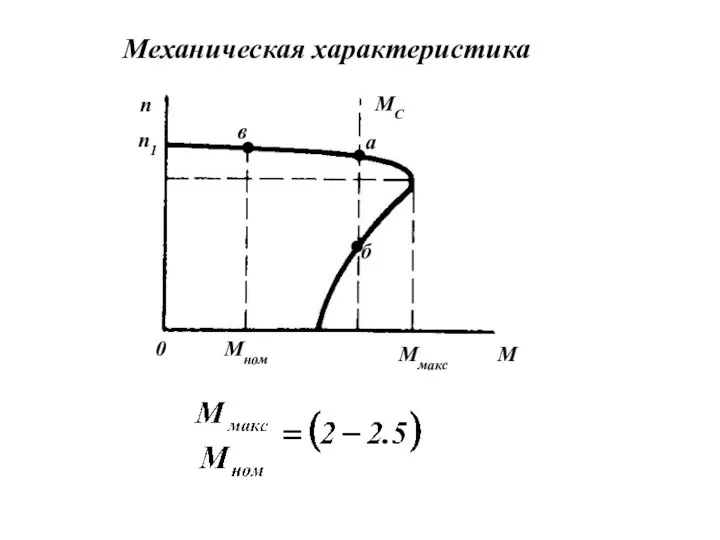
- 8. Механическая характеристика асинхронного двигателя Механическая мощность:
- 11. Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства. Он выяснил, что у таких
- 12. Асинхронный двигатель с фазным ротором
- 14. Короткозамкнутый ротор Фазный ротор
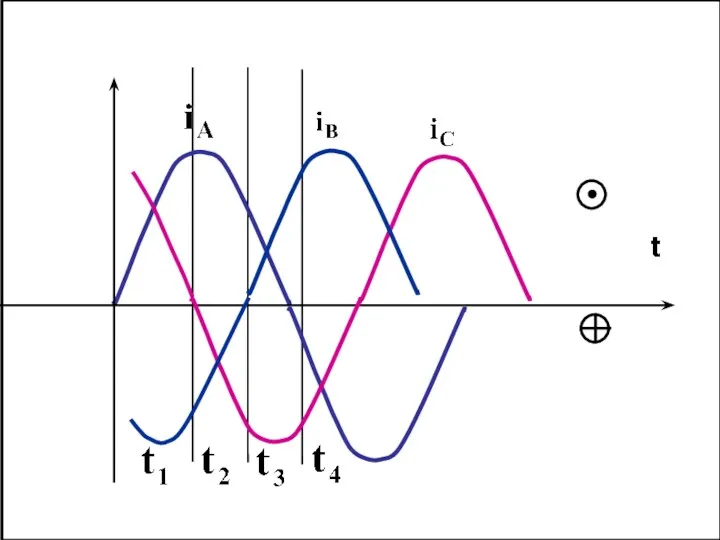
- 15. Принцип работы машин переменного тока: вращающееся ЭМ-поле
- 16. Вращение асинхронного двигателя за счёт действия 2-х законов 1. Закон электромагнитной индукции
- 17. 2. Действие силы Ампера на проводники с током обмотки ротора B = Ф/S, Тл
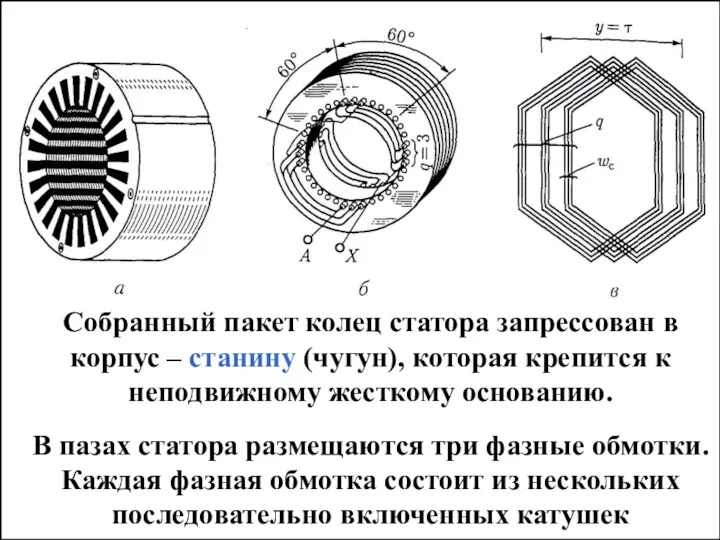
- 18. Конструкция статора Сердечник статора – полый цилиндр, собранный из отдельных кольцевых пластин, штампованных из листов электротехнической
- 19. Собранный пакет колец статора запрессован в корпус – станину (чугун), которая крепится к неподвижному жесткому основанию.
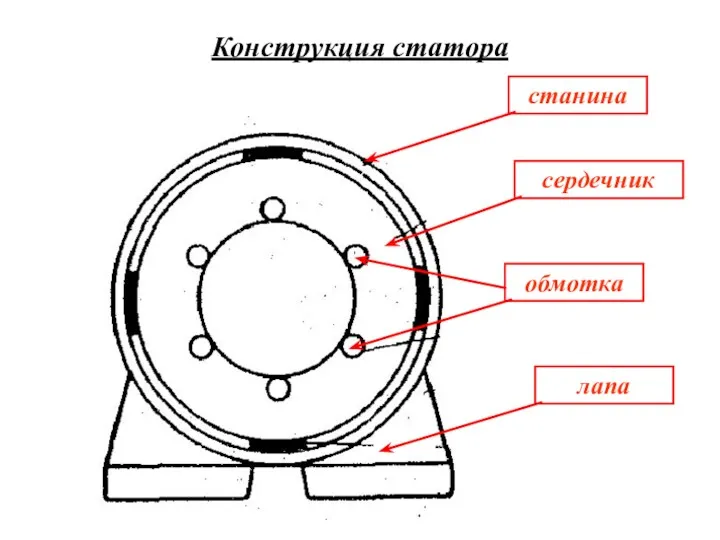
- 20. Конструкция статора станина сердечник обмотка лапа
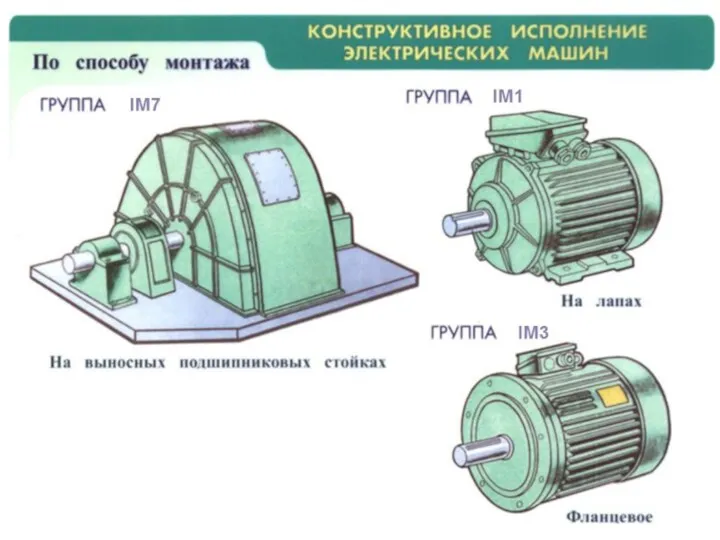
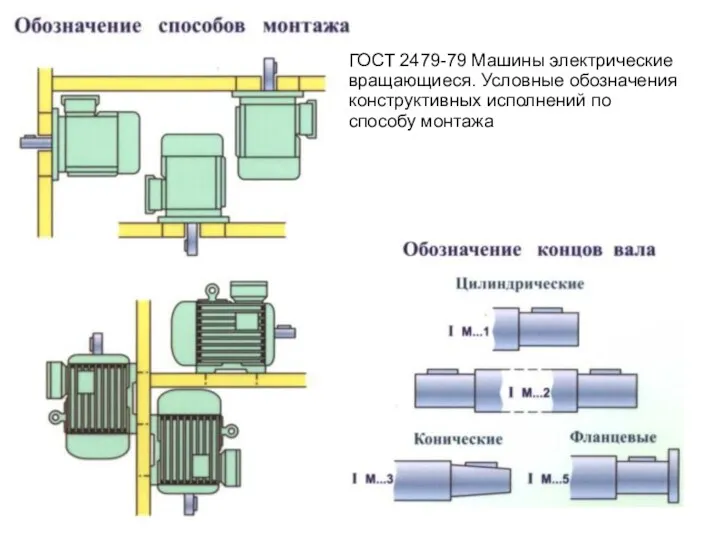
- 22. ГОСТ 2479-79 Машины электрические вращающиеся. Условные обозначения конструктивных исполнений по способу монтажа
- 23. Начала и концы фаз обмоток статора выведены на клеммник, закреплённый на станине. Обмотка статора может быть
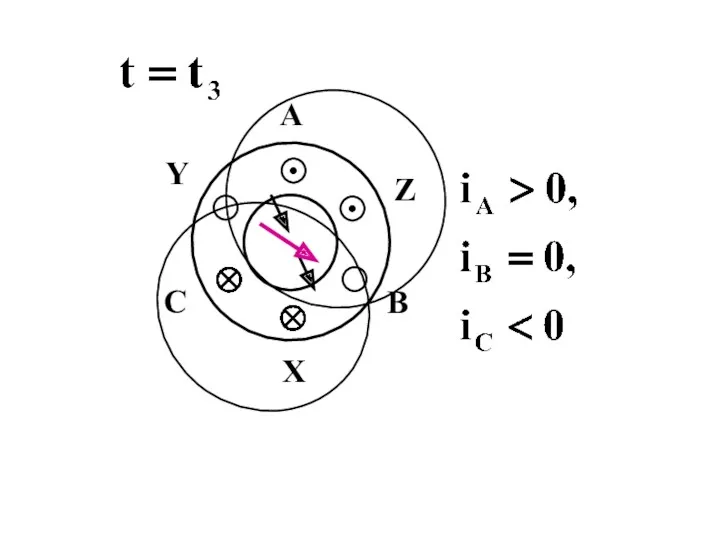
- 25. Ток в начале обмотки будем считать направленным к нам, если его значение положительно
- 29. - Если поменять любые две фазы местами, то изменится направление вращения магнитного поля (реверсирование) - Видоизменив
- 30. В этом случае частота вращения поля будет в 2 раза меньше, чем для р = 1.
- 31. Частоты вращения магнитного поля
- 32. Режимы работы трехфазной асинхронной машины Режим двигателя: на обмотку статора подается симметричная система токов и в
- 33. Взаимодействие вращающегося магнитного поля и токов ротора создает вращающий момент, увлекающий ротор за вращающимся магнитным полем.
- 34. Относительную разность частот вращения магнитного поля и ротора называют скольжением: В режиме двигателя, т.е. преобразование электрической
- 35. Если на работающем двигателе ротор разогнать с помощью двигателя до частоты > n0 в том же
- 36. Режим электромагнитного тормоза (S ≥ 1). Ротор вращается в направлении, противоположном направлению вращения поля статора. Это
- 37. двигатель генератор тормоз
- 38. Влияние S на частоту э.д.с. ротора и её значение E1= 4.44 f1w1ФМ E2= 4.44 f2s w2ФМ
- 39. n s = n1 – n2 частота скольжения f2s = nsp где р – число пар
- 40. Зависимость электромагнитного момента от скольжения Мном Ммакс SКР S Рабочий режим перегрузка неустойчивый режим
- 42. Регулирование частоты вращения асинхронного двигателя Частота вращения ротора С короткозамкнутым ротором: - метод частотного регулирования: -
- 43. Метод частотного регулирования Это плавное регулирование частоты вращения магнитного поля путем регулирования частоты тока в обмотке
- 45. Метод изменения числа пар полюсов Основан на изменении числа пар полюсов вращающегося магнитного поля статора, т.
- 46. С постоянным максимальным моментом С постоянной мощностью
- 47. Энергетическая диаграмма двигателя
- 48. мощность потерь на нагревание проводов обмотки статора (потери в меди); мощность потерь на гистерезис и вихревые
- 49. добавочные потери (создаются пульсациями магнитного поля); механические потери; полезная механическая мощность, отдаваемая на валу двигателя
- 50. Режимы работы электрических машин см. в ГОСТ IEC 60034-1-2014
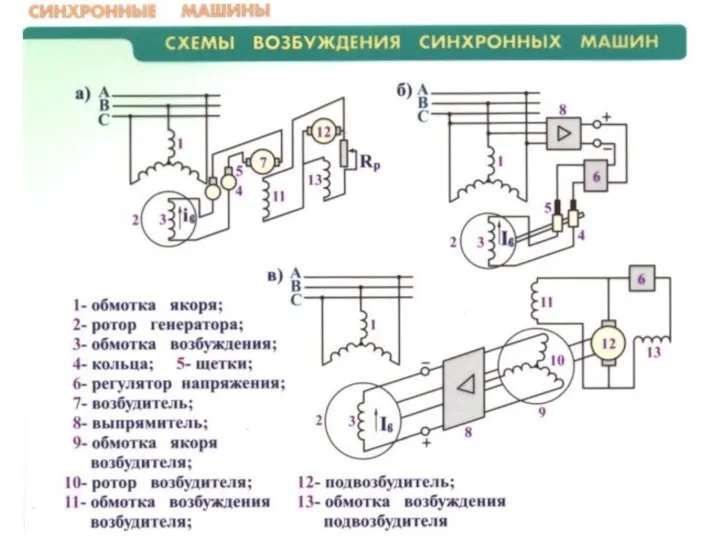
- 51. Синхронные машины
- 57. Реакция якоря в синхронном генераторе Активная нагрузка Индуктивная нагрузка Емкостная нагрузка
- 59. U-образные характеристики синхронного двигателя / компенсатора
- 60. Угол нагрузки синхронных машин Без нагрузки Генератор под нагрузкой Двигатель под нагрузкой
- 62. Скачать презентацию
Классификация электрических машин
Генераторы преобразуют механическую энергию в электрическую посредством ЭМ-поля
Классификация электрических машин
Генераторы преобразуют механическую энергию в электрическую посредством ЭМ-поля
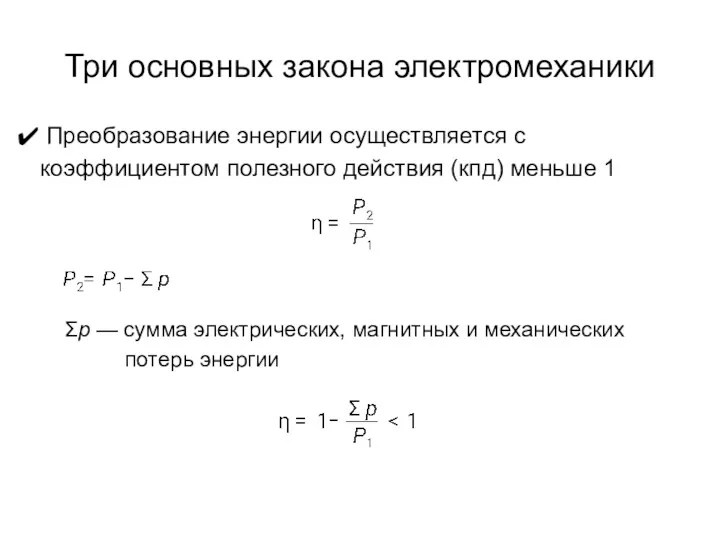
Три основных закона электромеханики
Преобразование энергии осуществляется с
коэффициентом полезного действия (кпд)
Три основных закона электромеханики
Преобразование энергии осуществляется с
коэффициентом полезного действия (кпд)
Электрические двигатели и генераторы обратимы:
одна и та же электрическая
Электрические двигатели и генераторы обратимы: одна и та же электрическая

Асинхронные машины
(двигатели)
Асинхронные машины
(двигатели)

Асинхронные двигатели с короткозамкнутым ротором примерно 90% всех двигателей
Асинхронные двигатели с короткозамкнутым ротором примерно 90% всех двигателей
Создатели асинхронного двигателя
М.О. Доливо-Добровольский
Никола Тесла
1888 г.
1888 г.
1889 г.
1890 г.
Создатели асинхронного двигателя
М.О. Доливо-Добровольский
Никола Тесла
1888 г.
1888 г.
1889 г.
1890 г.
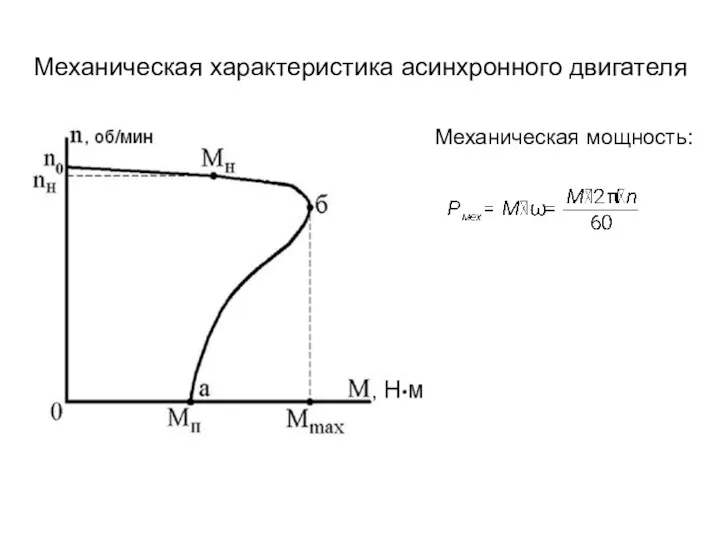
Механическая характеристика асинхронного двигателя
Механическая мощность:
Механическая характеристика асинхронного двигателя
Механическая мощность:


Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства.
Доливо-Добровольский первым создал двигатель с короткозамкнутым ротором и исследовал его свойства.
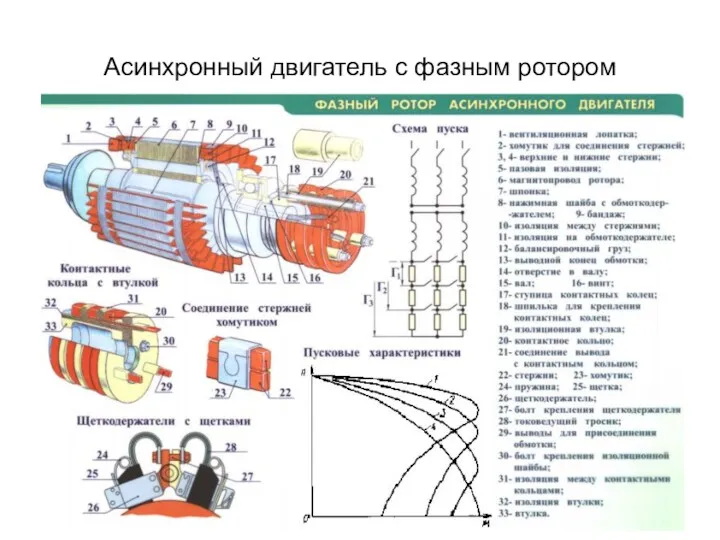
Асинхронный двигатель с фазным ротором
Асинхронный двигатель с фазным ротором

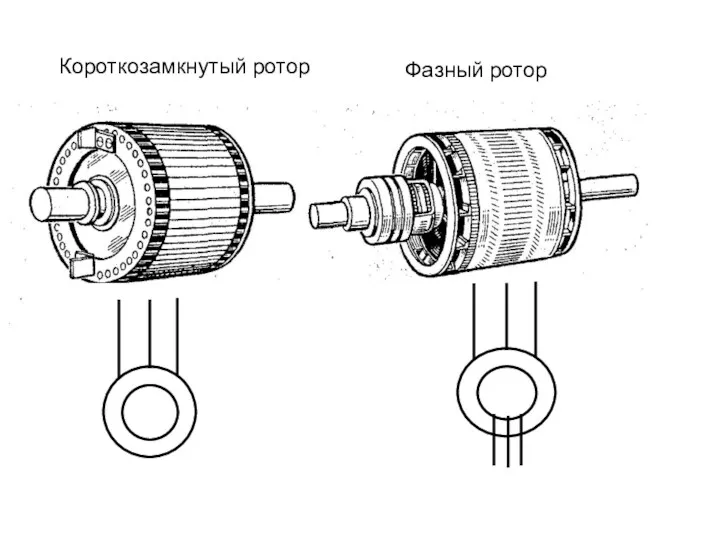
Короткозамкнутый ротор
Фазный ротор
Короткозамкнутый ротор
Фазный ротор
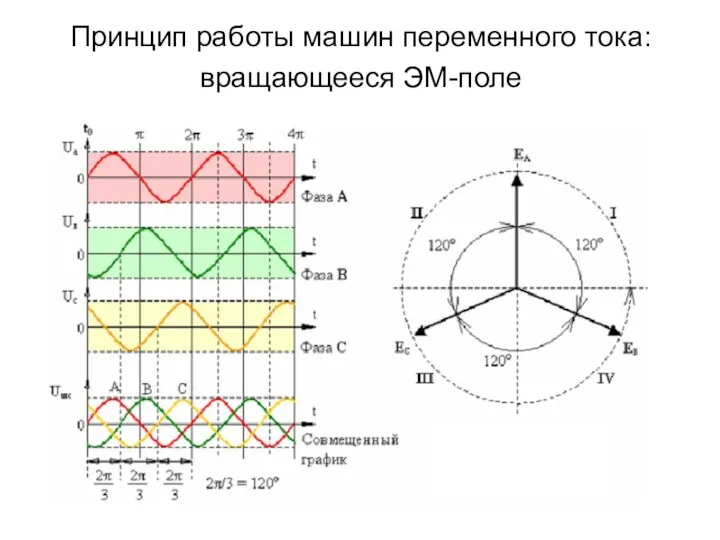
Принцип работы машин переменного тока:
вращающееся ЭМ-поле
Принцип работы машин переменного тока:
вращающееся ЭМ-поле
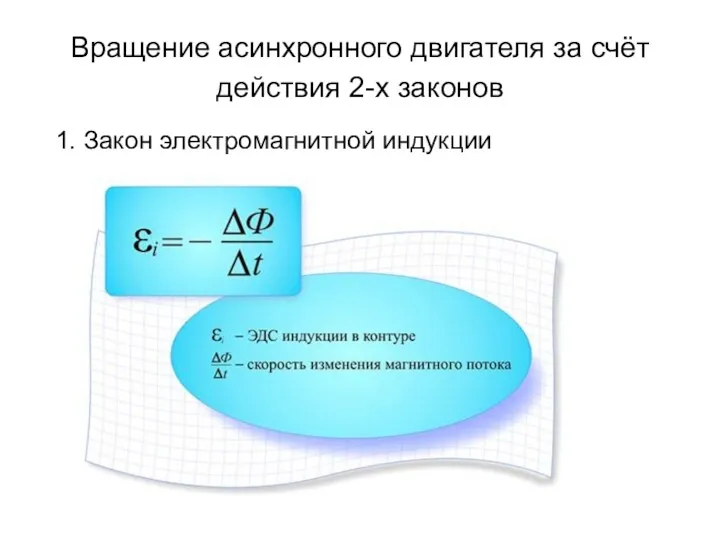
Вращение асинхронного двигателя за счёт действия 2-х законов
1. Закон электромагнитной индукции
Вращение асинхронного двигателя за счёт действия 2-х законов
1. Закон электромагнитной индукции
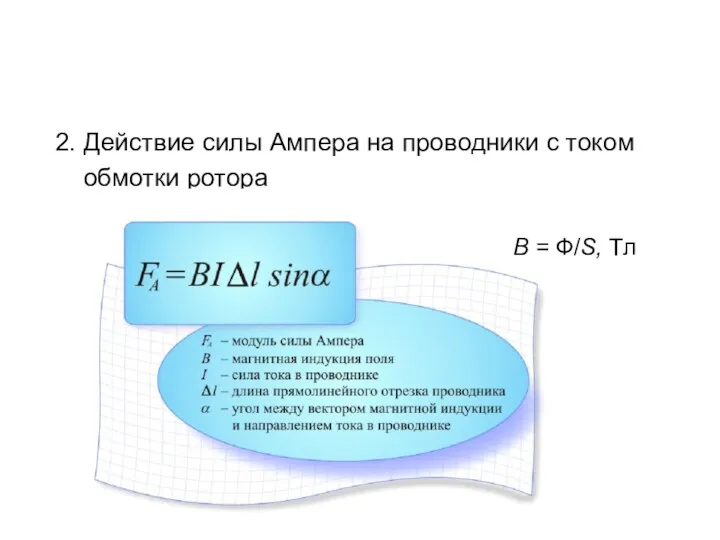
2. Действие силы Ампера на проводники с током
обмотки ротора
B =
2. Действие силы Ампера на проводники с током
обмотки ротора
B =
Конструкция статора
Сердечник статора – полый цилиндр, собранный из отдельных кольцевых пластин,
Конструкция статора
Сердечник статора – полый цилиндр, собранный из отдельных кольцевых пластин,
Собранный пакет колец статора запрессован в корпус – станину (чугун), которая
Собранный пакет колец статора запрессован в корпус – станину (чугун), которая
Конструкция статора
станина
сердечник
обмотка
лапа
Конструкция статора
станина
сердечник
обмотка
лапа
ГОСТ 2479-79 Машины электрические
вращающиеся. Условные обозначения
конструктивных исполнений по
способу монтажа
ГОСТ 2479-79 Машины электрические
вращающиеся. Условные обозначения
конструктивных исполнений по
способу монтажа
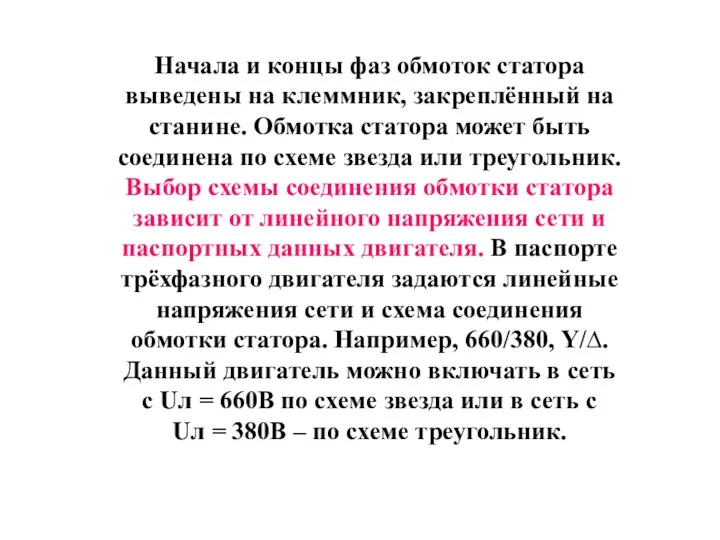
Начала и концы фаз обмоток статора выведены на клеммник, закреплённый на
Начала и концы фаз обмоток статора выведены на клеммник, закреплённый на
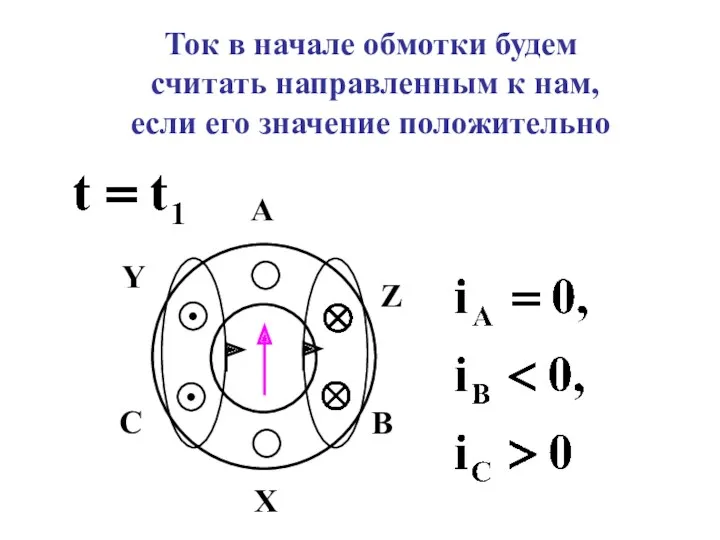
Ток в начале обмотки будем
считать направленным к нам,
если его
Ток в начале обмотки будем
считать направленным к нам,
если его

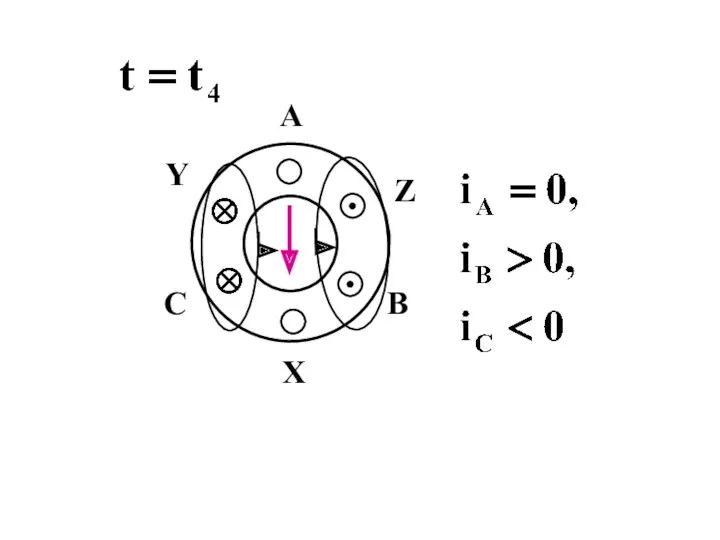
- Если поменять любые две фазы местами, то изменится направление вращения
- Если поменять любые две фазы местами, то изменится направление вращения
В этом случае частота вращения поля будет в 2 раза меньше,
В этом случае частота вращения поля будет в 2 раза меньше,
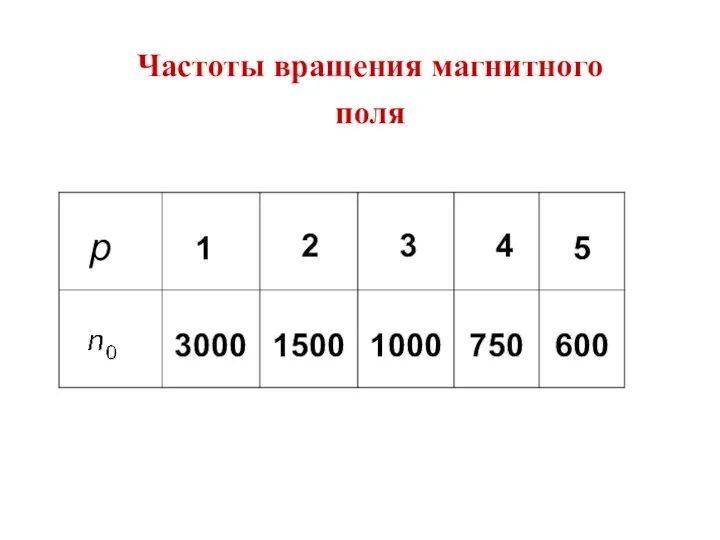
Частоты вращения магнитного поля
Частоты вращения магнитного поля
Режимы работы трехфазной асинхронной машины
Режим двигателя: на обмотку статора подается симметричная
Режимы работы трехфазной асинхронной машины
Режим двигателя: на обмотку статора подается симметричная
Взаимодействие вращающегося магнитного поля и токов ротора создает вращающий момент, увлекающий
Взаимодействие вращающегося магнитного поля и токов ротора создает вращающий момент, увлекающий
Относительную разность частот вращения магнитного поля и ротора называют скольжением:
В режиме
Относительную разность частот вращения магнитного поля и ротора называют скольжением:
В режиме
Если на работающем двигателе ротор разогнать с помощью двигателя до
Если на работающем двигателе ротор разогнать с помощью двигателя до
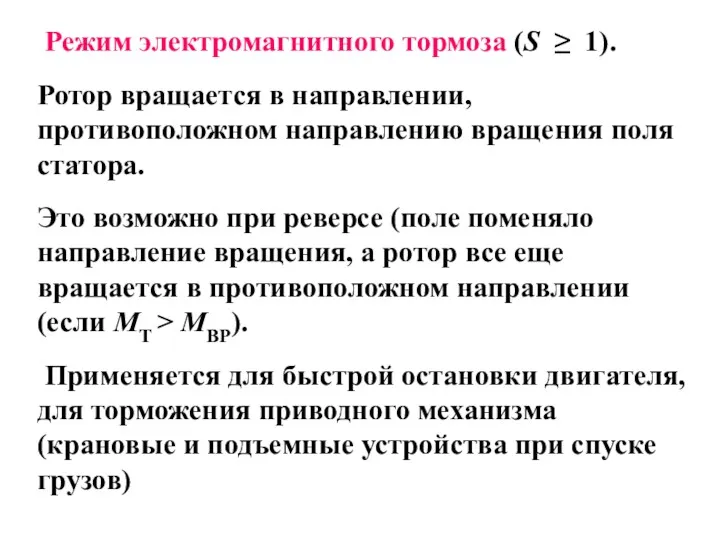
Режим электромагнитного тормоза (S ≥ 1).
Ротор вращается в направлении,
Режим электромагнитного тормоза (S ≥ 1).
Ротор вращается в направлении,
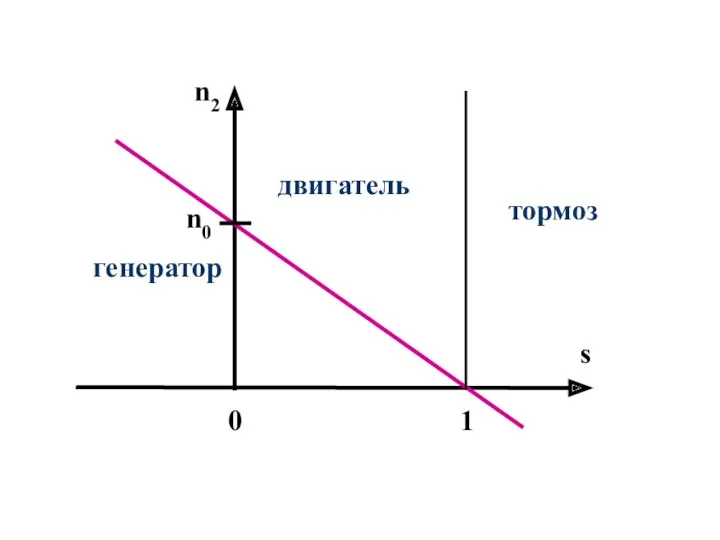
двигатель
генератор
тормоз
двигатель
генератор
тормоз
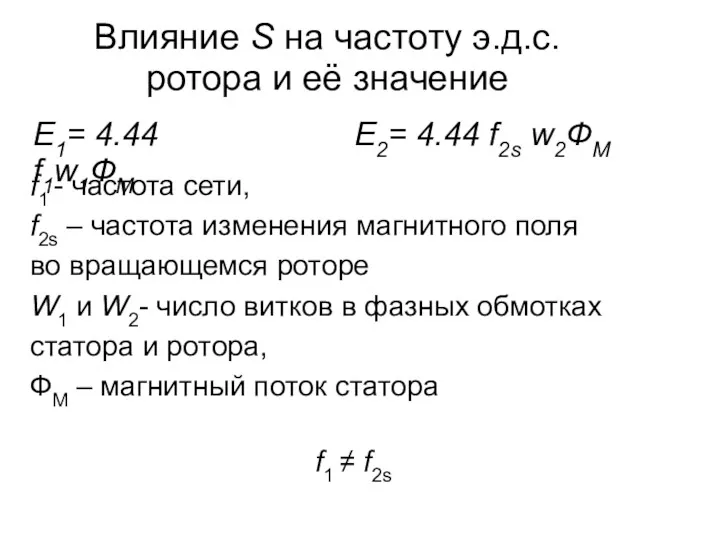
Влияние S на частоту э.д.с. ротора и её значение
E1= 4.44
Влияние S на частоту э.д.с. ротора и её значение
E1= 4.44
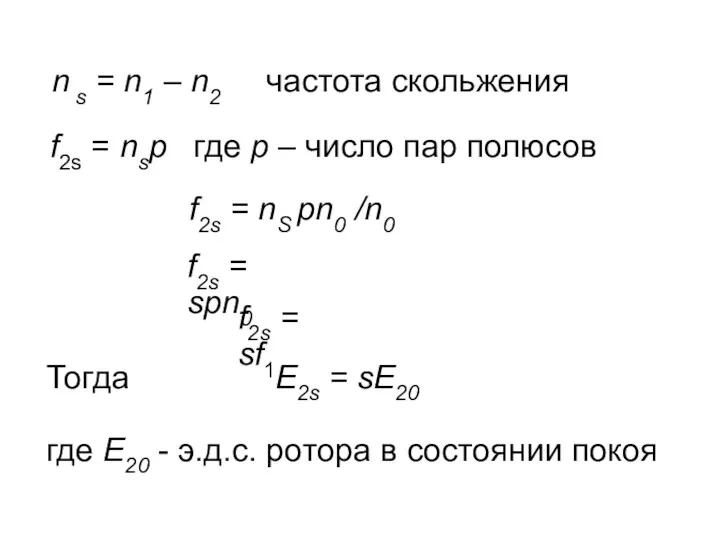
n s = n1 – n2 частота скольжения
f2s = nsp где
n s = n1 – n2 частота скольжения
f2s = nsp где
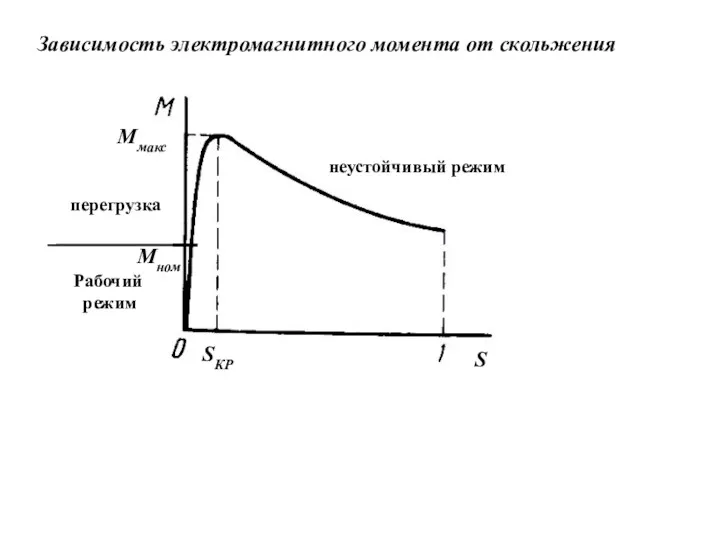
Зависимость электромагнитного момента от скольжения
Мном
Ммакс
SКР
S
Рабочий
режим
перегрузка
неустойчивый режим
Зависимость электромагнитного момента от скольжения
Мном
Ммакс
SКР
S
Рабочий
режим
перегрузка
неустойчивый режим
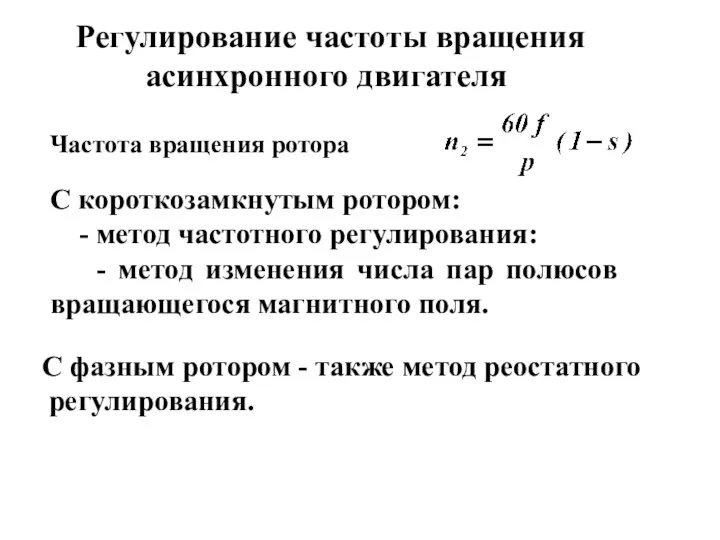
Регулирование частоты вращения асинхронного двигателя
Частота вращения ротора
С короткозамкнутым ротором:
Регулирование частоты вращения асинхронного двигателя
Частота вращения ротора
С короткозамкнутым ротором:
Метод частотного регулирования
Это плавное регулирование частоты вращения магнитного поля путем
Метод частотного регулирования
Это плавное регулирование частоты вращения магнитного поля путем

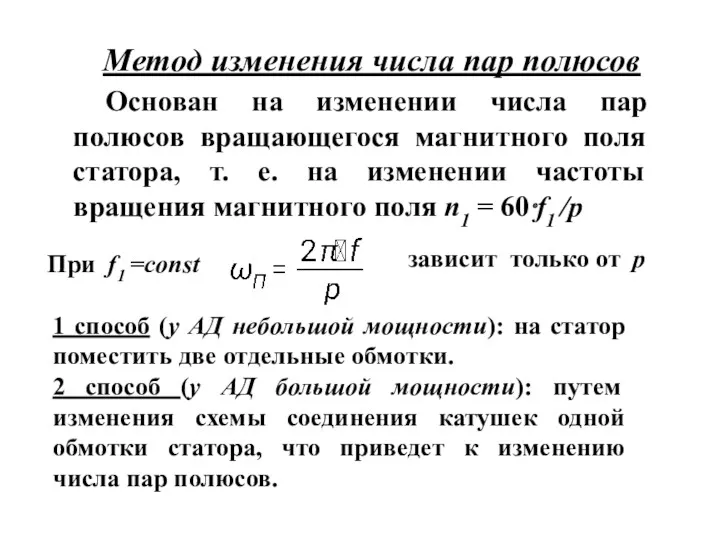
Метод изменения числа пар полюсов
Основан на изменении числа пар полюсов
Метод изменения числа пар полюсов
Основан на изменении числа пар полюсов
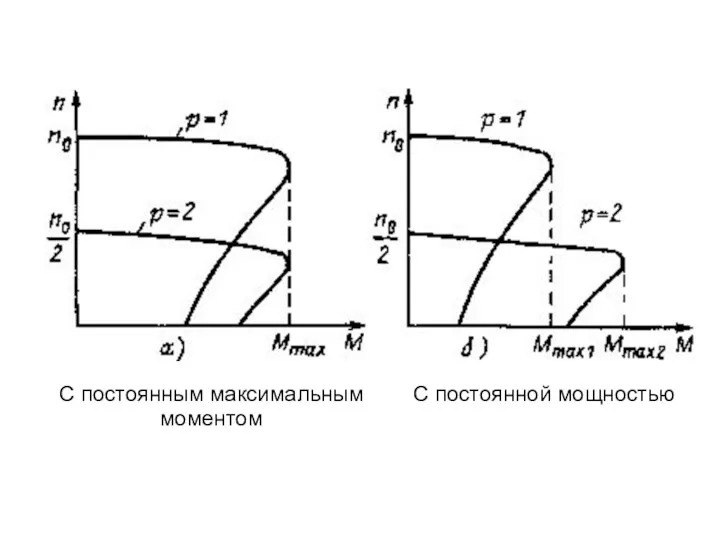
С постоянным максимальным моментом
С постоянной мощностью
С постоянным максимальным моментом
С постоянной мощностью
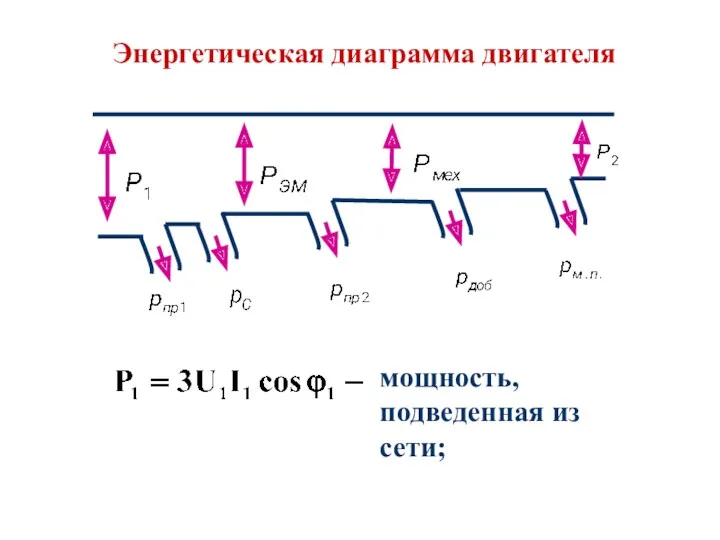
Энергетическая диаграмма двигателя
Энергетическая диаграмма двигателя
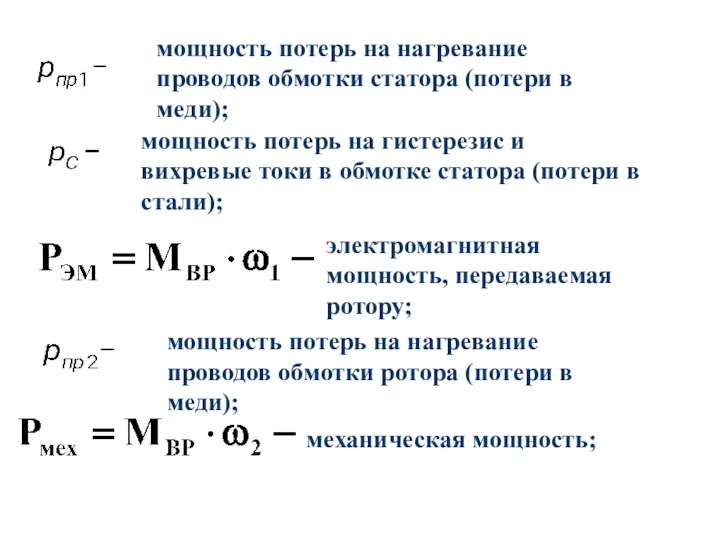
мощность потерь на нагревание проводов обмотки статора (потери в меди);
мощность потерь
мощность потерь на нагревание проводов обмотки статора (потери в меди);
мощность потерь
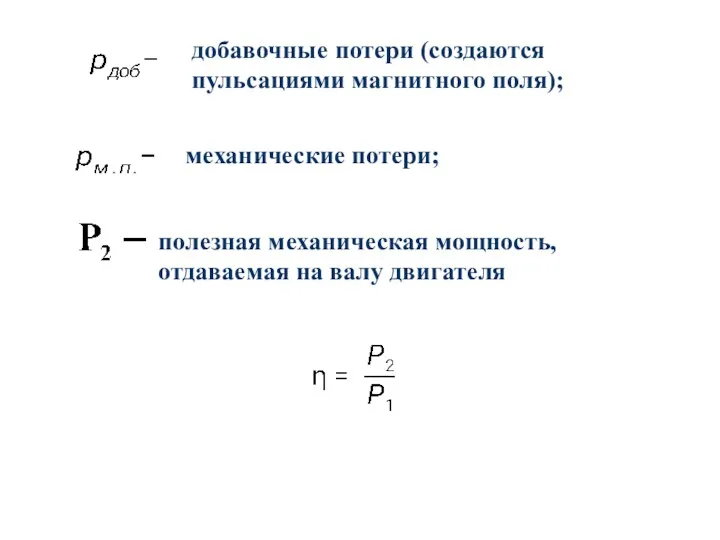
добавочные потери (создаются пульсациями магнитного поля);
механические потери;
полезная механическая мощность, отдаваемая
добавочные потери (создаются пульсациями магнитного поля);
механические потери;
полезная механическая мощность, отдаваемая
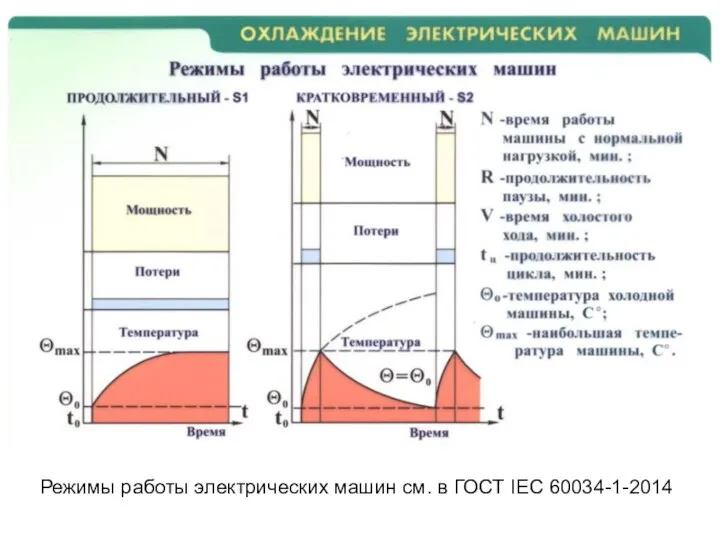
Режимы работы электрических машин см. в ГОСТ IEC 60034-1-2014
Режимы работы электрических машин см. в ГОСТ IEC 60034-1-2014

Синхронные машины
Синхронные машины


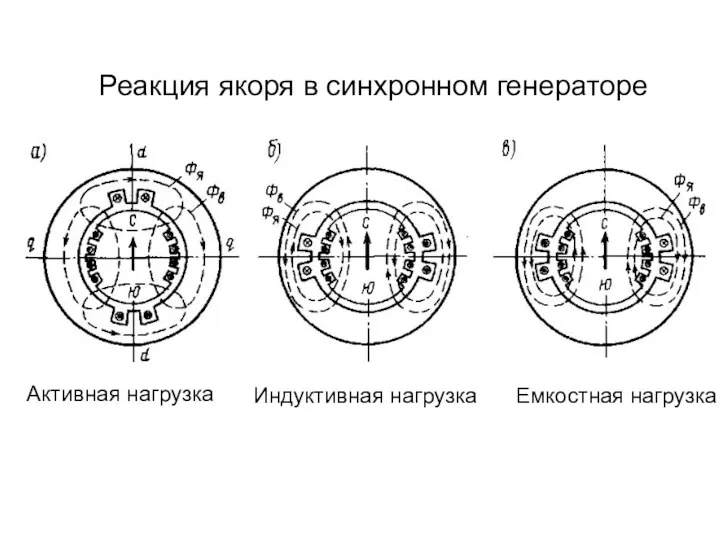
Реакция якоря в синхронном генераторе
Активная нагрузка
Индуктивная нагрузка
Емкостная нагрузка
Реакция якоря в синхронном генераторе
Активная нагрузка
Индуктивная нагрузка
Емкостная нагрузка


U-образные характеристики
синхронного двигателя / компенсатора
U-образные характеристики
синхронного двигателя / компенсатора
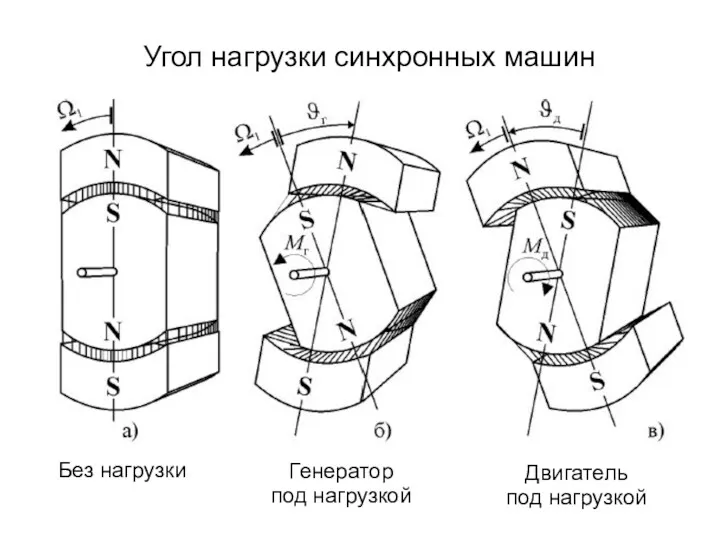
Угол нагрузки синхронных машин
Без нагрузки
Генератор
под нагрузкой
Двигатель
под нагрузкой
Угол нагрузки синхронных машин
Без нагрузки
Генератор
под нагрузкой
Двигатель
под нагрузкой
 Подземные воды. 6 класс
Подземные воды. 6 класс Эксплуатация скважин в осложненных условиях
Эксплуатация скважин в осложненных условиях Удивительный мир камней. 3 класс
Удивительный мир камней. 3 класс урок+презентация Религия и культура
урок+презентация Религия и культура Справедливость
Справедливость Четыре замечательные точки треугольника
Четыре замечательные точки треугольника XXI ғасыр Көшбасшысы
XXI ғасыр Көшбасшысы Сложение натуральных чисел и его свойства. 5 класс
Сложение натуральных чисел и его свойства. 5 класс Методическая разработка Климат Южной Америки
Методическая разработка Климат Южной Америки Красноярский край в РФ
Красноярский край в РФ Макет специализированного транспорта
Макет специализированного транспорта Виживання опромінених клітин і багатоклітинних організмів та її дозова залежність
Виживання опромінених клітин і багатоклітинних організмів та її дозова залежність Масленица Диск
Масленица Диск Моделирование деловых процессов
Моделирование деловых процессов Водное путешествие 2-ой степени сложности с элементами I категории сложности по Среднему Уралу, р. Усьва
Водное путешествие 2-ой степени сложности с элементами I категории сложности по Среднему Уралу, р. Усьва Угадай полуостровную страну Европы! (Дания)
Угадай полуостровную страну Европы! (Дания) Углеводы. Моносахариды
Углеводы. Моносахариды Поощрение и наказание в семейном воспитании
Поощрение и наказание в семейном воспитании Проецирование
Проецирование Александр Петрович Извольский
Александр Петрович Извольский Правовые, экономические и социальные основы охраны здоровья граждан в РК. Обязанности граждан в сфере охраны здоровья
Правовые, экономические и социальные основы охраны здоровья граждан в РК. Обязанности граждан в сфере охраны здоровья Факторы риска ОНМК и нейрореабилитация после инсульта
Факторы риска ОНМК и нейрореабилитация после инсульта Химия в сельском хозяйстве. 9 кл.
Химия в сельском хозяйстве. 9 кл. Сочинение по картине М.А.Врубеля Царевна-лебедь
Сочинение по картине М.А.Врубеля Царевна-лебедь ВОСПИТАНИЕ ЧЕРЕЗ ТВОРЧЕСТВО
ВОСПИТАНИЕ ЧЕРЕЗ ТВОРЧЕСТВО Системно-деятельностный подход при формировании универсальных учебных действий
Системно-деятельностный подход при формировании универсальных учебных действий Авторская песня
Авторская песня Родник и его образование
Родник и его образование