- Конструктивные особенности и устройство БПЛА мультироторного типа

Содержание
- 2. Мультикоптеры БПЛА летающий по вертолетный схеме, с двумя и более моторов.
- 3. Виды мультикоптеров. БиКоптер Три-коптер Квадрокоптер Гексакоптер Октокоптер
- 4. Квадрокоптер Квадрокоптер — это мультикоптер с четырьмя моторами, который летает по вертолетной схеме.
- 5. Двигатель - Плата распределения питания - Пропеллер - Защита для пропеллеров - Приемник радиосигнала Рама -
- 6. Полетный контроллер. Полетный контроллер —это мозг вашего дрона. Он определяет состояние вашего летательного аппарата, опрашивая массив
- 7. Направления вращения двигателей квадрокоптера. CW- по часовой стрелке. CCW-против часовой стрелки.
- 8. Пульт управления БПЛА (передатчик). Два главных джойстика являются наиболее важными органами управления и всегда занимают четыре
- 9. Принцип действия электронных компонентов.
- 10. Плата распределения питания (PDB). Плата распределения питания отвечает за прием электропитания от аккумулятора и его распределение
- 11. Аккумулятор. Химический источник тока многоразового действия.
- 12. Характеристики аккумулятора. Ёмкость Токоотдача Напряжение Количество ячеек
- 13. Приемник радиосигнала Приемник радиосигнала необходим для приема управляющего сигнала, исходящего от пульта управления.
- 14. Двигатели. коллекторные и бесколлекторные.
- 15. Коллекторный двигатель. Преимущества: Маленький вес и размер Низкая стоимость Прост в ремонте Недостатки: Перегрев Быстрый износ
- 16. Бесколлекторный двигатель. Преимущества Высокая скорость вращения Износостойкость Защищённость от внешних воздействий Недостатки Стоимость Сложный ремонт
- 17. Характеристики электродвигателя. Мощность (потребляемая). Вес. Энергоэффективность (КПД). Температура нагрева в работе. Балансировка и уровень вибрации. Тяга.
- 18. Регуляторы оборотов (ESC). Представляют собой небольшие электронные устройства, предназначенные для управления скоростью и направлением вращения каждого
- 19. Параметры пропеллеров Угол атаки Размер Шаг Количество лопастей Направление вращения
- 21. Скачать презентацию
Мультикоптеры
БПЛА летающий по вертолетный схеме, с двумя и более моторов.
Мультикоптеры
БПЛА летающий по вертолетный схеме, с двумя и более моторов.

Виды мультикоптеров.
БиКоптер
Три-коптер
Квадрокоптер
Гексакоптер
Октокоптер
Виды мультикоптеров.
БиКоптер
Три-коптер
Квадрокоптер
Гексакоптер
Октокоптер
Квадрокоптер
Квадрокоптер — это мультикоптер с четырьмя моторами, который летает по вертолетной
Квадрокоптер
Квадрокоптер — это мультикоптер с четырьмя моторами, который летает по вертолетной

Двигатель
- Плата распределения питания
- Пропеллер
- Защита для пропеллеров
- Приемник радиосигнала
Рама -
Регуляторы
Двигатель
- Плата распределения питания
- Пропеллер
- Защита для пропеллеров
- Приемник радиосигнала
Рама -
Регуляторы

Полетный контроллер.
Полетный контроллер —это мозг вашего дрона. Он определяет состояние вашего
Полетный контроллер.
Полетный контроллер —это мозг вашего дрона. Он определяет состояние вашего
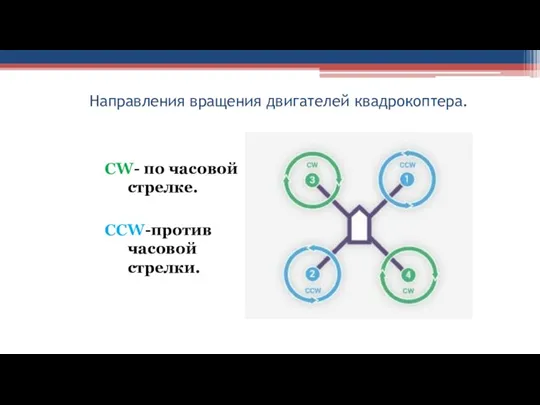
Направления вращения двигателей квадрокоптера.
CW- по часовой стрелке.
CCW-против часовой стрелки.
Направления вращения двигателей квадрокоптера.
CW- по часовой стрелке.
CCW-против часовой стрелки.

Пульт управления БПЛА (передатчик).
Два главных джойстика являются наиболее важными органами управления
Пульт управления БПЛА (передатчик).
Два главных джойстика являются наиболее важными органами управления
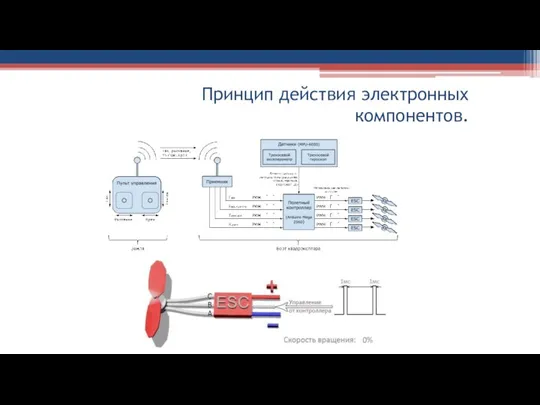
Принцип действия электронных
компонентов.
Принцип действия электронных
компонентов.

Плата распределения питания (PDB).
Плата распределения питания отвечает за прием электропитания от
Плата распределения питания (PDB).
Плата распределения питания отвечает за прием электропитания от
Аккумулятор.
Химический источник тока многоразового действия.
Аккумулятор.
Химический источник тока многоразового действия.
Характеристики аккумулятора.
Ёмкость
Токоотдача
Напряжение
Количество ячеек
Характеристики аккумулятора.
Ёмкость
Токоотдача
Напряжение
Количество ячеек

Приемник радиосигнала
Приемник радиосигнала необходим для приема управляющего сигнала, исходящего от пульта
Приемник радиосигнала
Приемник радиосигнала необходим для приема управляющего сигнала, исходящего от пульта

Двигатели.
коллекторные и бесколлекторные.
Двигатели.
коллекторные и бесколлекторные.

Коллекторный двигатель.
Преимущества:
Маленький вес и размер
Низкая стоимость
Прост в ремонте Недостатки:
Перегрев
Быстрый износ
Низкий КПД
Низкая
Коллекторный двигатель.
Преимущества:
Маленький вес и размер
Низкая стоимость
Прост в ремонте Недостатки:
Перегрев
Быстрый износ
Низкий КПД
Низкая

Бесколлекторный двигатель.
Преимущества
Высокая скорость вращения
Износостойкость
Защищённость от внешних воздействий
Недостатки
Стоимость
Сложный ремонт
Бесколлекторный двигатель.
Преимущества
Высокая скорость вращения
Износостойкость
Защищённость от внешних воздействий
Недостатки
Стоимость
Сложный ремонт
Характеристики электродвигателя.
Мощность (потребляемая).
Вес.
Энергоэффективность (КПД).
Температура нагрева в работе.
Балансировка и уровень вибрации.
Тяга.
KV.
Характеристики электродвигателя.
Мощность (потребляемая).
Вес.
Энергоэффективность (КПД).
Температура нагрева в работе.
Балансировка и уровень вибрации.
Тяга.
KV.

Регуляторы оборотов (ESC).
Представляют собой небольшие электронные устройства, предназначенные для управления скоростью
Регуляторы оборотов (ESC).
Представляют собой небольшие электронные устройства, предназначенные для управления скоростью
Параметры пропеллеров
Угол атаки
Размер
Шаг
Количество лопастей
Направление вращения
Параметры пропеллеров
Угол атаки
Размер
Шаг
Количество лопастей
Направление вращения
 Биологические науки. Интерактивный кроссворд
Биологические науки. Интерактивный кроссворд ТБ на летних каникулах
ТБ на летних каникулах Кремнийорганикалық қосылыстар
Кремнийорганикалық қосылыстар Арифметические и логические основы работы компьютера
Арифметические и логические основы работы компьютера Верховино 1917-1920
Верховино 1917-1920 Дополнительная общеобразовательная программа Малая тимирязевка
Дополнительная общеобразовательная программа Малая тимирязевка Элементы IА-группы и их соединения
Элементы IА-группы и их соединения География 6 класс Изображение на плане неровностей земной поверхности
География 6 класс Изображение на плане неровностей земной поверхности Мышечная ткань. Мышцы частей тела
Мышечная ткань. Мышцы частей тела 200 лет Царскосельскому лицею
200 лет Царскосельскому лицею Избирательная система
Избирательная система Избирательное право. Избирательные системы их виды
Избирательное право. Избирательные системы их виды Ко Дню Защитника Отечества.
Ко Дню Защитника Отечества. История медиа. Наскальные рисунки индейцев
История медиа. Наскальные рисунки индейцев Презентация Рефлексия
Презентация Рефлексия Цветная металлургия
Цветная металлургия Осложнения в процессе бурения скважин
Осложнения в процессе бурения скважин Человекообразные обезьяны
Человекообразные обезьяны Managementul integrat al pacienților cu diaree
Managementul integrat al pacienților cu diaree презентация на тему Метод проектов в ДОУ
презентация на тему Метод проектов в ДОУ Презентация конкурса Мамочка милая, мама моя!
Презентация конкурса Мамочка милая, мама моя! Презентация Пасхальная викторина
Презентация Пасхальная викторина Проект Аты-баты, шли солдаты в подготовительной к школе группе
Проект Аты-баты, шли солдаты в подготовительной к школе группе Конструкции элементов полупроводниковых ИС на МДП-транзисторах
Конструкции элементов полупроводниковых ИС на МДП-транзисторах X областной кинофестиваль для детей, юношества и семьи
X областной кинофестиваль для детей, юношества и семьи презентация по химии Техника безопасности
презентация по химии Техника безопасности Производство конструкционных материалов
Производство конструкционных материалов Меры безопасности при переходе железной дороги и автомобильных дорог
Меры безопасности при переходе железной дороги и автомобильных дорог