- Конструктивные особенности конвейеров

Содержание
- 2. Конструктивные особенности конвейеров Конвейер ленточный или ленточный транспортер обычно применяют для транспортировки кусковых, штучных и сыпучих
- 3. Общие требования к электроприводу конвейеров По технологическим условиям работы конвейеры большей частью, не требуют регулирование скорости.
- 4. Скребковый конвейер состоит из следующих основных узлов и элементов: - оцинкованный корпус конвейера (днище, боковые стенки,
- 5. Элеватор ковшовый
- 6. Конвейер шахтный скребковый Предназначены для транспортировки угля вдоль лавы и погрузки угля на перегружатель в очистных
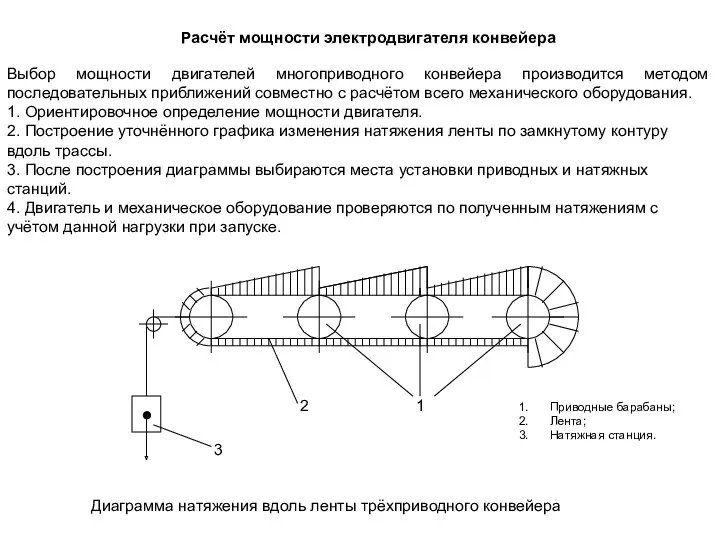
- 9. Расчёт мощности электродвигателя конвейера Выбор мощности двигателей многоприводного конвейера производится методом последовательных приближений совместно с расчётом
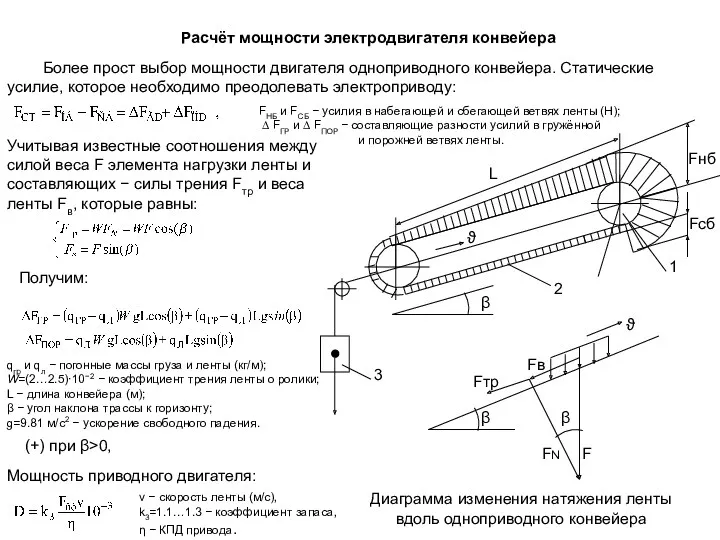
- 10. Расчёт мощности электродвигателя конвейера Более прост выбор мощности двигателя одноприводного конвейера. Статические усилие, которое необходимо преодолевать
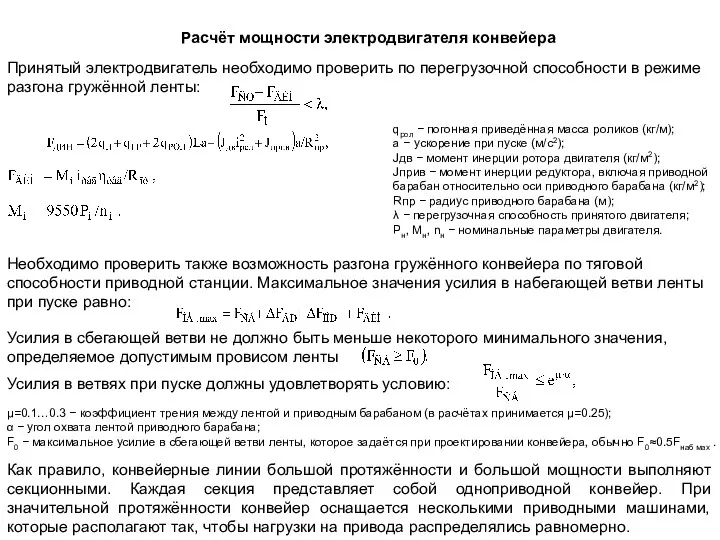
- 11. Расчёт мощности электродвигателя конвейера Принятый электродвигатель необходимо проверить по перегрузочной способности в режиме разгона гружённой ленты:
- 12. Требования к системе ЭП мощных конвейерных установок Вопросом развития систем ЭП мощных конвейерных установок в отечественной
- 13. В то же время, запуск тяжёлых конвейеров осуществляется сравнительно редко. В этой связи становится целесообразным применять
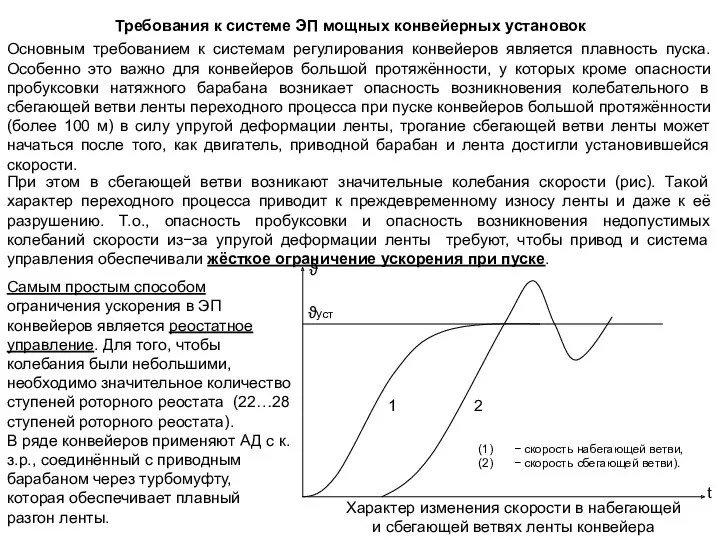
- 14. Требования к системе ЭП мощных конвейерных установок При этом в сбегающей ветви возникают значительные колебания скорости
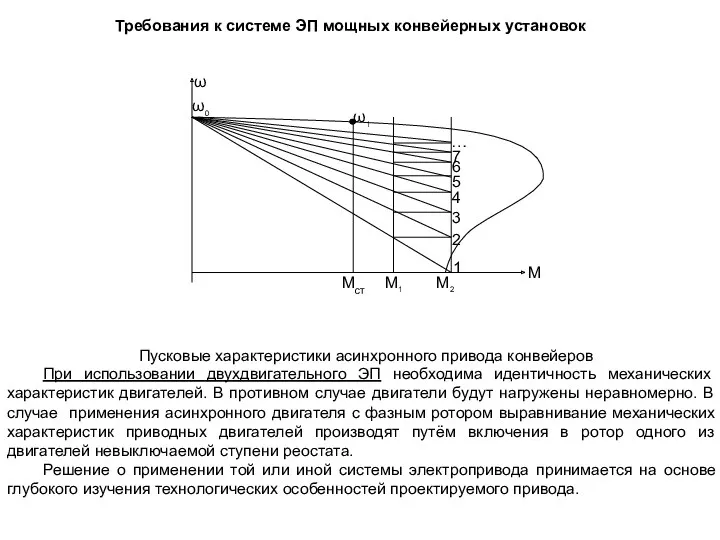
- 15. При использовании двухдвигательного ЭП необходима идентичность механических характеристик двигателей. В противном случае двигатели будут нагружены неравномерно.
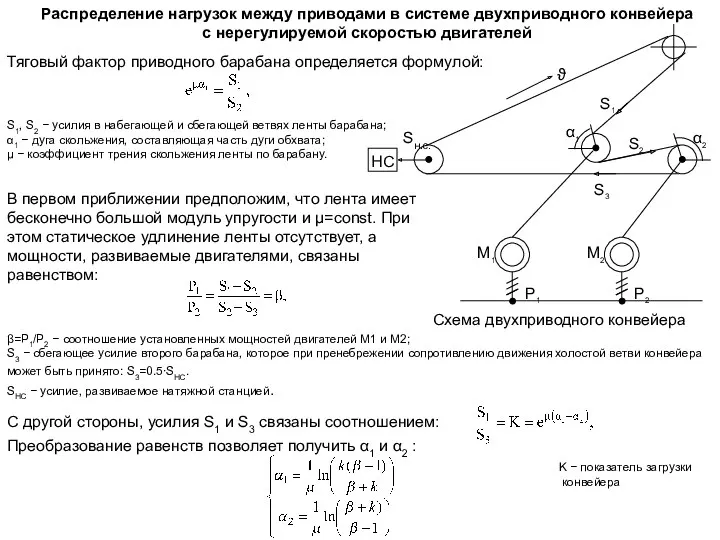
- 16. Распределение нагрузок между приводами в системе двухприводного конвейера с нерегулируемой скоростью двигателей Тяговый фактор приводного барабана
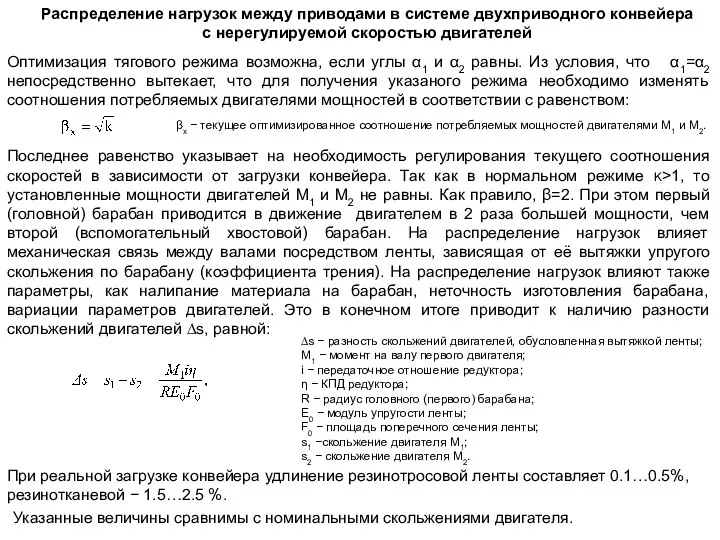
- 17. Распределение нагрузок между приводами в системе двухприводного конвейера с нерегулируемой скоростью двигателей Оптимизация тягового режима возможна,
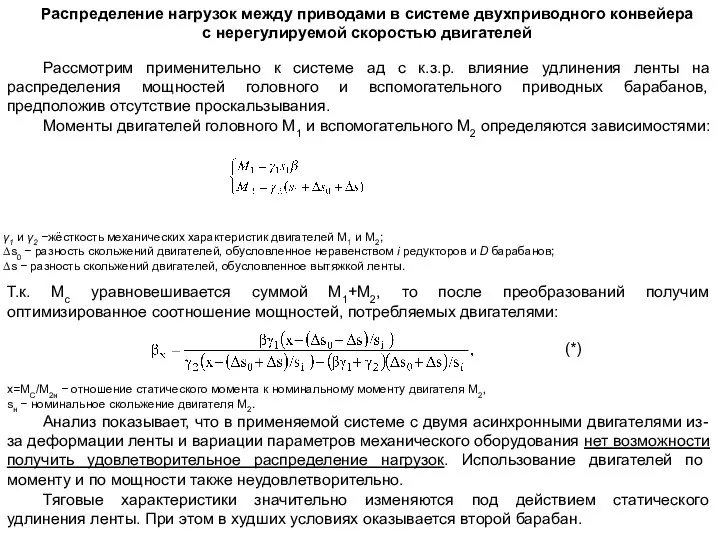
- 18. Распределение нагрузок между приводами в системе двухприводного конвейера с нерегулируемой скоростью двигателей Рассмотрим применительно к системе
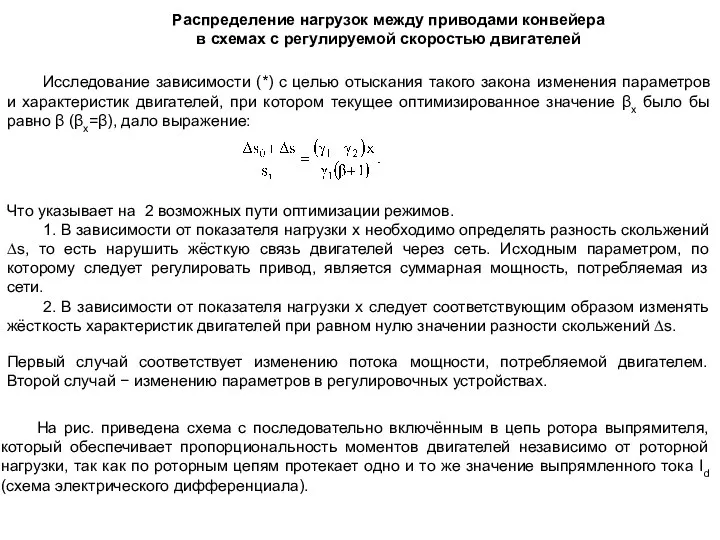
- 19. Распределение нагрузок между приводами конвейера в схемах с регулируемой скоростью двигателей Исследование зависимости (*) с целью
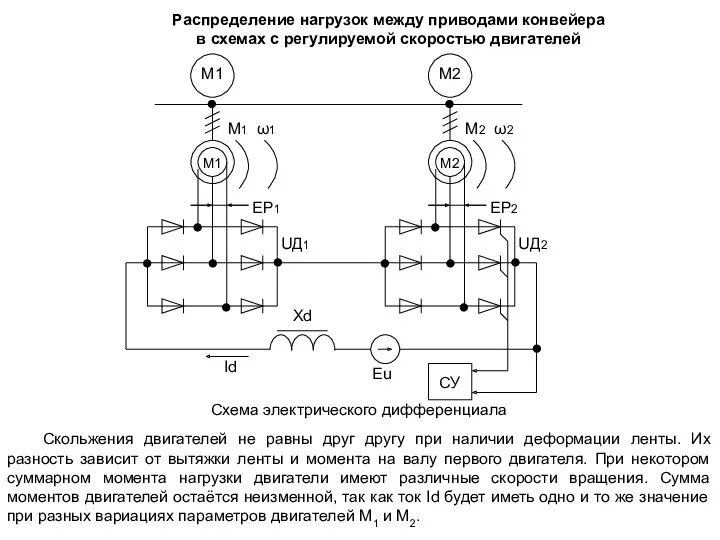
- 20. Распределение нагрузок между приводами конвейера в схемах с регулируемой скоростью двигателей Схема электрического дифференциала Скольжения двигателей
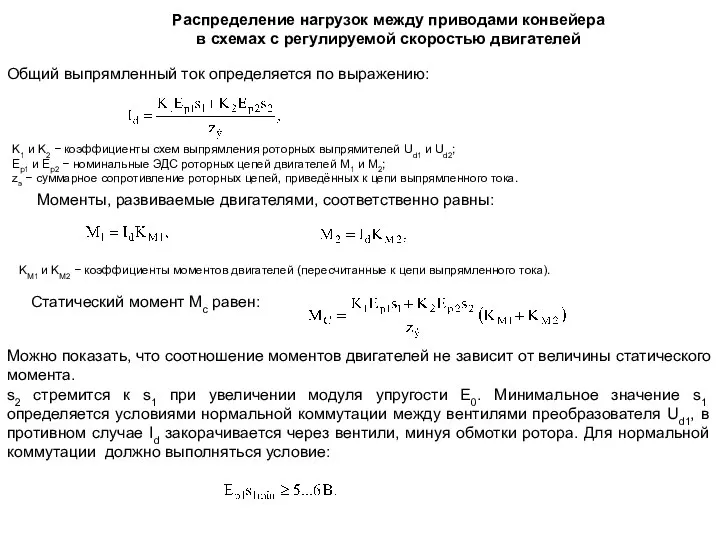
- 21. Распределение нагрузок между приводами конвейера в схемах с регулируемой скоростью двигателей Общий выпрямленный ток определяется по
- 22. С учётом последнего допустимое значение модуля упругости ленты, обеспечивающее нормальную работу системы электропривода, определяется выражением: Распределение
- 23. В простейшем варианте обратная связь по усилию вступает в действие при достижении заданной разности y0 между
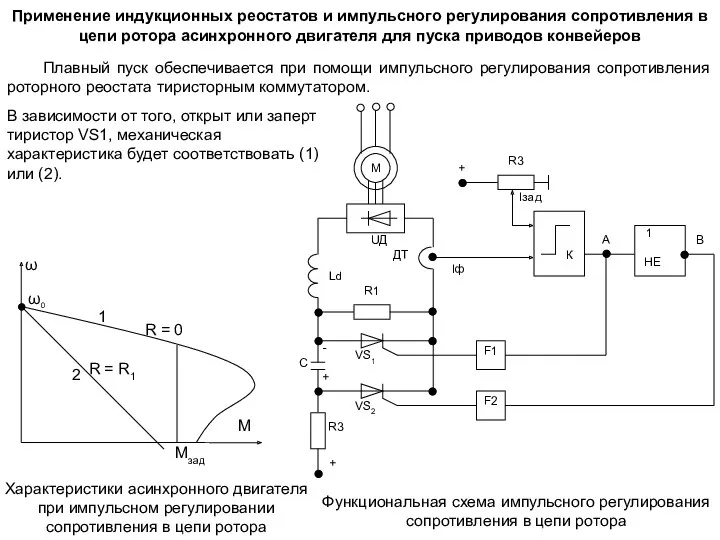
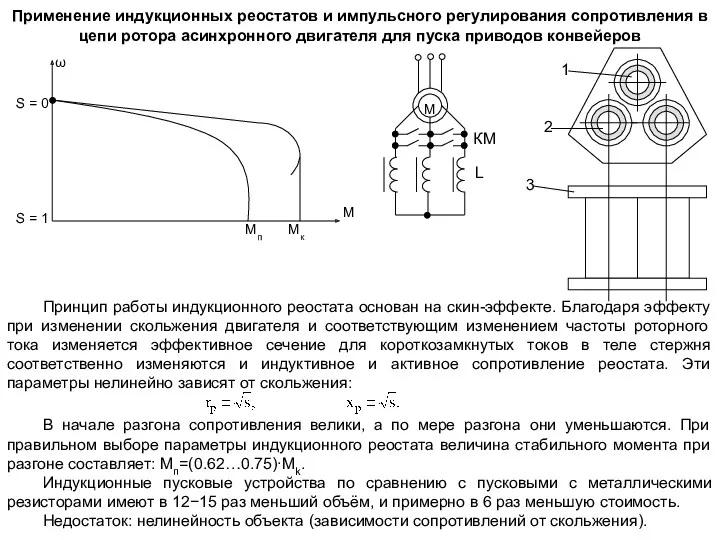
- 24. Применение индукционных реостатов и импульсного регулирования сопротивления в цепи ротора асинхронного двигателя для пуска приводов конвейеров
- 25. Применение индукционных реостатов и импульсного регулирования сопротивления в цепи ротора асинхронного двигателя для пуска приводов конвейеров
- 26. Применение индукционных реостатов и импульсного регулирования сопротивления в цепи ротора асинхронного двигателя для пуска приводов конвейеров
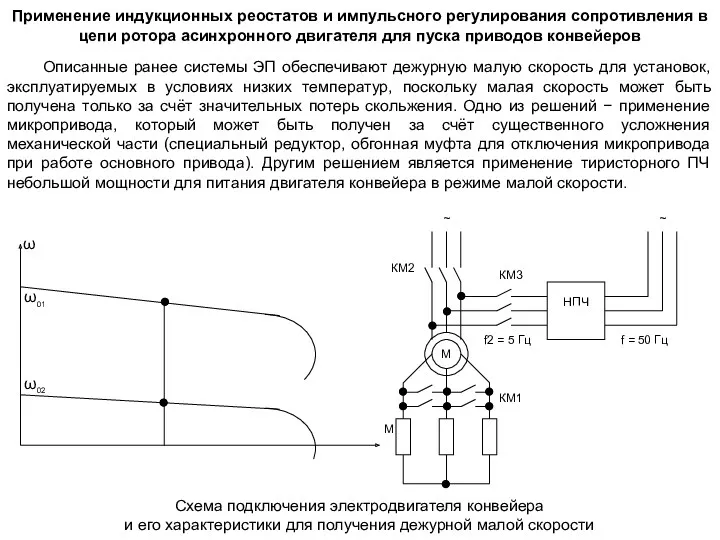
- 27. Описанные ранее системы ЭП обеспечивают дежурную малую скорость для установок, эксплуатируемых в условиях низких температур, поскольку
- 28. Вспомогательные электроприводы ленточных конвейеров. Системы управления конвейерными линиями Крупные конвейеры имеют ряд вспомогательных ЭП. К ним
- 29. Вспомогательные электроприводы ленточных конвейеров. Системы управления конвейерными линиями
- 30. Упрощённая схема управления многосекционной конвейерной ленты М1, М2, М3 − приводные двигатели конвейеров, включаемые контакторами KM1,
- 31. Схема предусматривает два режима: местный (положение переключателя М) и дистанционный (Н). Местное управление применяется для различного
- 32. Идеальным случаем работы конвейера является случай, когда eμ∙α=∞ и S3=0. так как величины α и μ
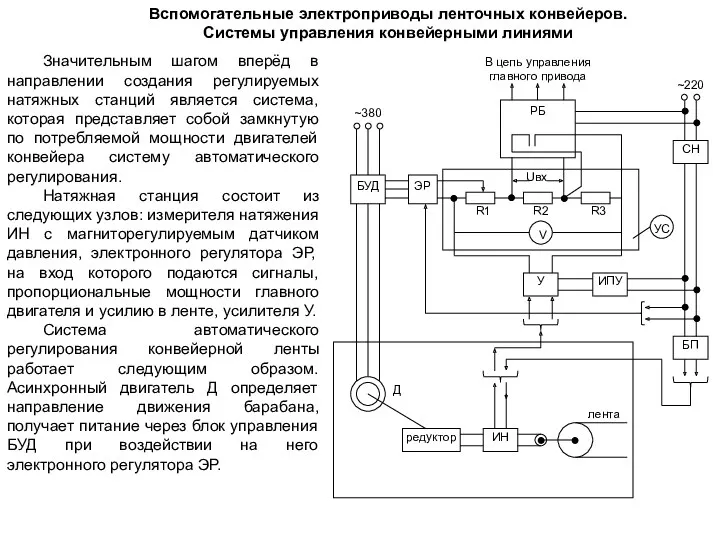
- 33. Вспомогательные электроприводы ленточных конвейеров. Системы управления конвейерными линиями Значительным шагом вперёд в направлении создания регулируемых натяжных
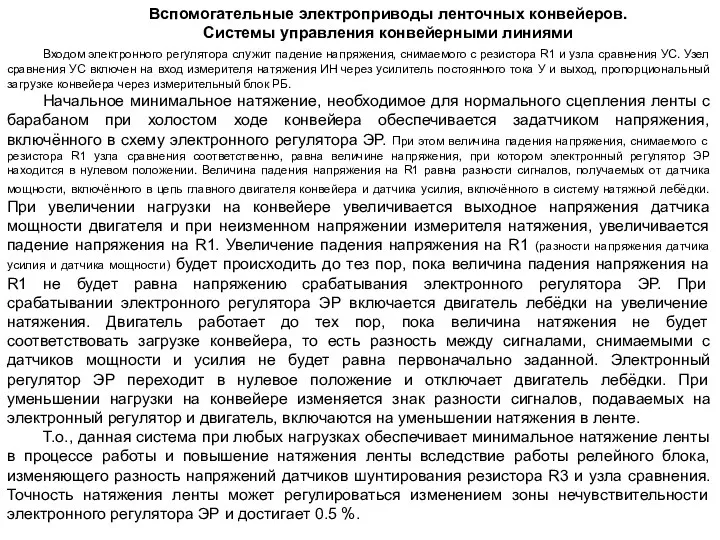
- 34. Входом электронного регулятора служит падение напряжения, снимаемого с резистора R1 и узла сравнения УС. Узел сравнения
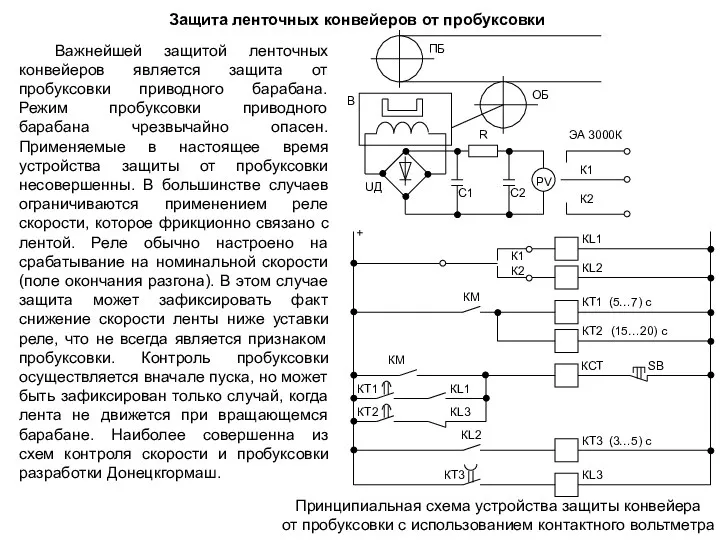
- 35. Защита ленточных конвейеров от пробуксовки Важнейшей защитой ленточных конвейеров является защита от пробуксовки приводного барабана. Режим
- 36. Защита ленточных конвейеров от пробуксовки Магнитоиндукционный датчик В состоит из постоянного магнита, снабжённого обмоткой. Этот датчик
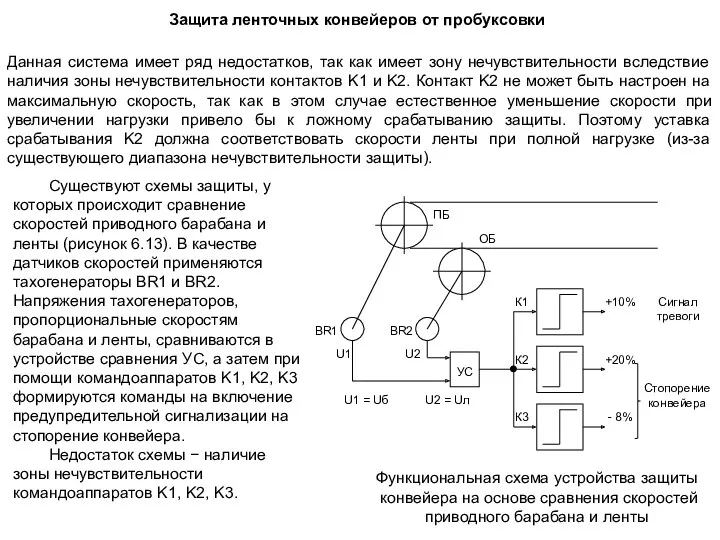
- 37. Защита ленточных конвейеров от пробуксовки Данная система имеет ряд недостатков, так как имеет зону нечувствительности вследствие
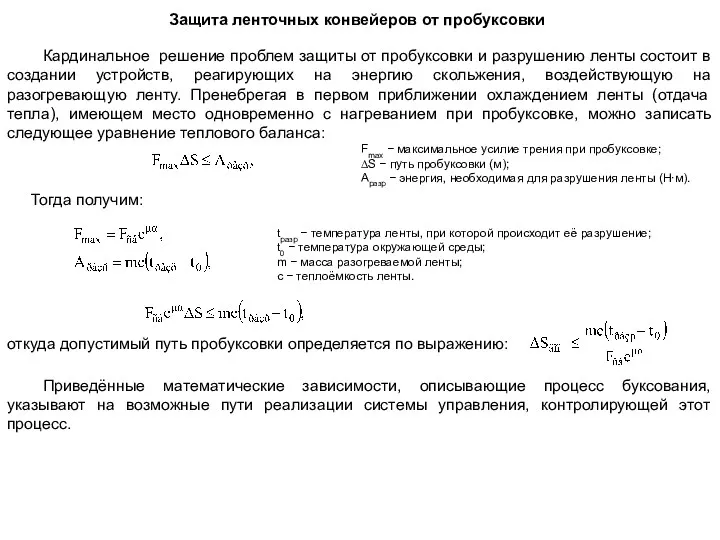
- 38. Защита ленточных конвейеров от пробуксовки Кардинальное решение проблем защиты от пробуксовки и разрушению ленты состоит в
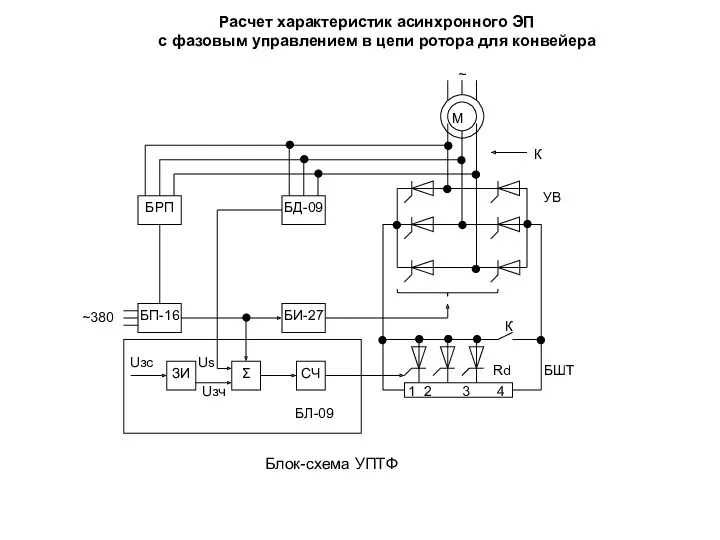
- 39. Расчет характеристик асинхронного ЭП с фазовым управлением в цепи ротора для конвейера Блок-схема УПТФ
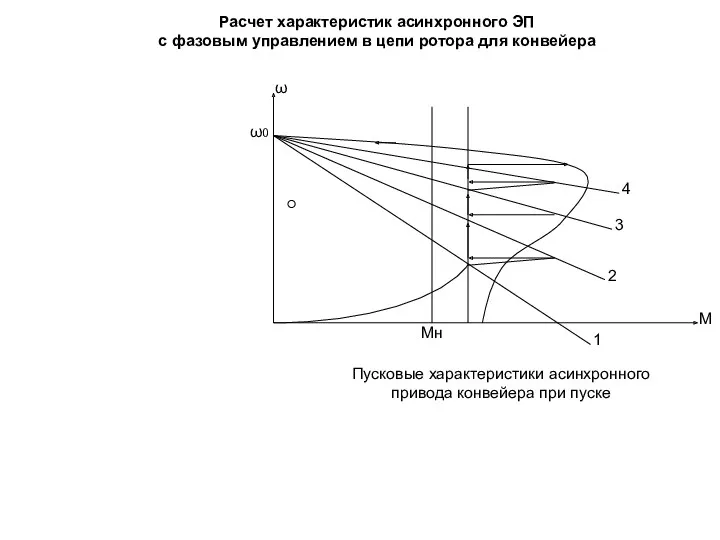
- 40. Расчет характеристик асинхронного ЭП с фазовым управлением в цепи ротора для конвейера Пусковые характеристики асинхронного привода
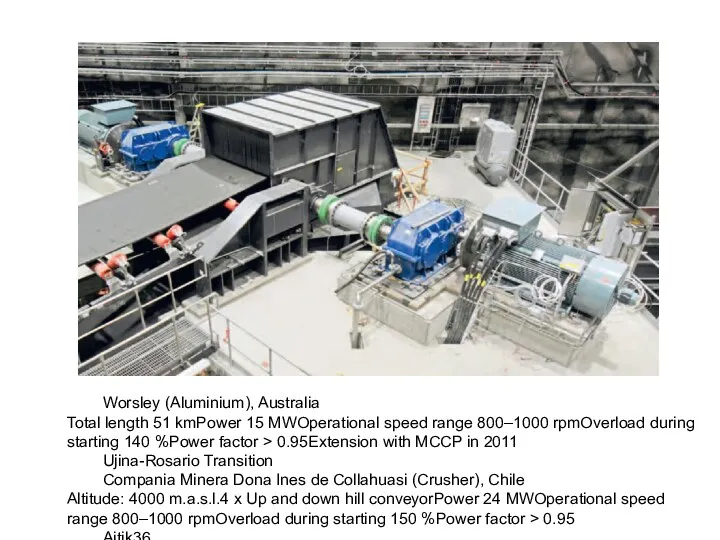
- 41. Worsley (Aluminium), Australia Total length 51 kmPower 15 MWOperational speed range 800–1000 rpmOverload during starting 140
- 43. Скачать презентацию
Конструктивные особенности конвейеров
Конвейер ленточный или ленточный транспортер обычно применяют для транспортировки кусковых,
Конструктивные особенности конвейеров
Конвейер ленточный или ленточный транспортер обычно применяют для транспортировки кусковых,

Общие требования к электроприводу конвейеров
По технологическим условиям работы конвейеры большей частью, не
Общие требования к электроприводу конвейеров
По технологическим условиям работы конвейеры большей частью, не
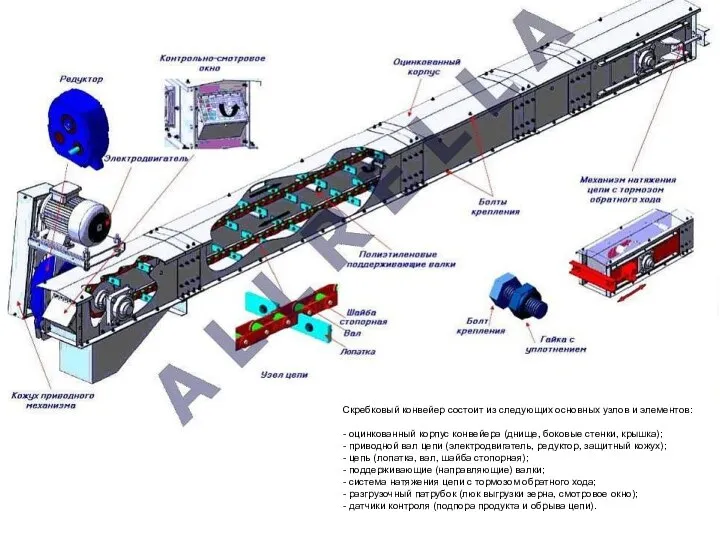
Скребковый конвейер состоит из следующих основных узлов и элементов:
- оцинкованный корпус конвейера (днище,
Скребковый конвейер состоит из следующих основных узлов и элементов: - оцинкованный корпус конвейера (днище,
Элеватор ковшовый
Элеватор ковшовый

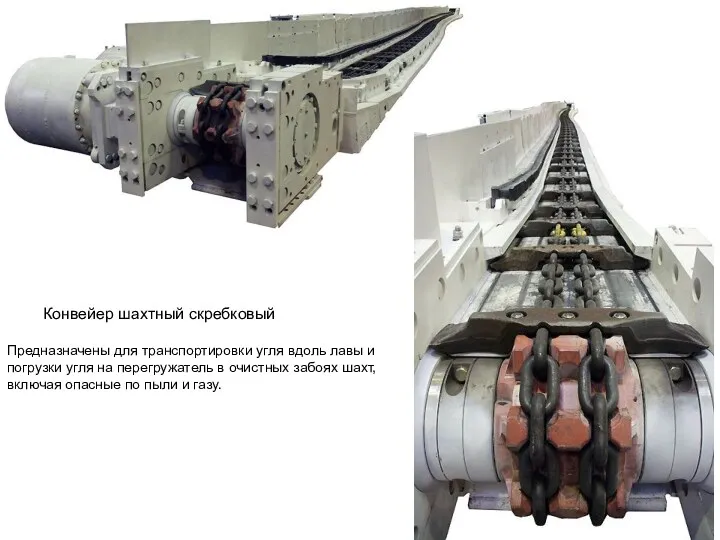
Конвейер шахтный скребковый
Предназначены для транспортировки угля вдоль лавы и погрузки угля на
Конвейер шахтный скребковый
Предназначены для транспортировки угля вдоль лавы и погрузки угля на

Расчёт мощности электродвигателя конвейера
Выбор мощности двигателей многоприводного конвейера производится методом последовательных приближений
Расчёт мощности электродвигателя конвейера
Выбор мощности двигателей многоприводного конвейера производится методом последовательных приближений
Расчёт мощности электродвигателя конвейера
Более прост выбор мощности двигателя одноприводного конвейера. Статические усилие,
Расчёт мощности электродвигателя конвейера
Более прост выбор мощности двигателя одноприводного конвейера. Статические усилие,
Расчёт мощности электродвигателя конвейера
Принятый электродвигатель необходимо проверить по перегрузочной способности в режиме
Расчёт мощности электродвигателя конвейера
Принятый электродвигатель необходимо проверить по перегрузочной способности в режиме
Требования к системе ЭП мощных конвейерных установок
Вопросом развития систем ЭП мощных конвейерных
Требования к системе ЭП мощных конвейерных установок
Вопросом развития систем ЭП мощных конвейерных
В то же время, запуск тяжёлых конвейеров осуществляется сравнительно редко. В этой связи
В то же время, запуск тяжёлых конвейеров осуществляется сравнительно редко. В этой связи
Требования к системе ЭП мощных конвейерных установок
При этом в сбегающей ветви возникают
Требования к системе ЭП мощных конвейерных установок
При этом в сбегающей ветви возникают
При использовании двухдвигательного ЭП необходима идентичность механических характеристик двигателей. В противном случае двигатели
При использовании двухдвигательного ЭП необходима идентичность механических характеристик двигателей. В противном случае двигатели
Распределение нагрузок между приводами в системе двухприводного конвейера
с нерегулируемой скоростью двигателей
Тяговый
Распределение нагрузок между приводами в системе двухприводного конвейера
с нерегулируемой скоростью двигателей
Тяговый
Распределение нагрузок между приводами в системе двухприводного конвейера
с нерегулируемой скоростью двигателей
Оптимизация
Распределение нагрузок между приводами в системе двухприводного конвейера
с нерегулируемой скоростью двигателей
Оптимизация
Распределение нагрузок между приводами в системе двухприводного конвейера
с нерегулируемой скоростью двигателей
Рассмотрим
Распределение нагрузок между приводами в системе двухприводного конвейера
с нерегулируемой скоростью двигателей
Рассмотрим
Распределение нагрузок между приводами конвейера
в схемах с регулируемой скоростью двигателей
Исследование зависимости
Распределение нагрузок между приводами конвейера
в схемах с регулируемой скоростью двигателей
Исследование зависимости
Распределение нагрузок между приводами конвейера
в схемах с регулируемой скоростью двигателей
Схема электрического
Распределение нагрузок между приводами конвейера
в схемах с регулируемой скоростью двигателей
Схема электрического
Распределение нагрузок между приводами конвейера
в схемах с регулируемой скоростью двигателей
Общий выпрямленный
Распределение нагрузок между приводами конвейера
в схемах с регулируемой скоростью двигателей
Общий выпрямленный
С учётом последнего допустимое значение модуля упругости ленты, обеспечивающее нормальную работу системы электропривода,
С учётом последнего допустимое значение модуля упругости ленты, обеспечивающее нормальную работу системы электропривода,
В простейшем варианте обратная связь по усилию вступает в действие при достижении заданной
В простейшем варианте обратная связь по усилию вступает в действие при достижении заданной
Применение индукционных реостатов и импульсного регулирования сопротивления в цепи ротора асинхронного двигателя для
Применение индукционных реостатов и импульсного регулирования сопротивления в цепи ротора асинхронного двигателя для
Применение индукционных реостатов и импульсного регулирования сопротивления в цепи ротора асинхронного двигателя для
Применение индукционных реостатов и импульсного регулирования сопротивления в цепи ротора асинхронного двигателя для
Применение индукционных реостатов и импульсного регулирования сопротивления в цепи ротора асинхронного двигателя для
Применение индукционных реостатов и импульсного регулирования сопротивления в цепи ротора асинхронного двигателя для
Описанные ранее системы ЭП обеспечивают дежурную малую скорость для установок, эксплуатируемых в условиях
Описанные ранее системы ЭП обеспечивают дежурную малую скорость для установок, эксплуатируемых в условиях
Вспомогательные электроприводы ленточных конвейеров.
Системы управления конвейерными линиями
Крупные конвейеры имеют ряд вспомогательных
Вспомогательные электроприводы ленточных конвейеров.
Системы управления конвейерными линиями
Крупные конвейеры имеют ряд вспомогательных
Вспомогательные электроприводы ленточных конвейеров.
Системы управления конвейерными линиями
Вспомогательные электроприводы ленточных конвейеров.
Системы управления конвейерными линиями

Упрощённая схема управления многосекционной конвейерной ленты
М1, М2, М3 − приводные двигатели конвейеров,
Упрощённая схема управления многосекционной конвейерной ленты
М1, М2, М3 − приводные двигатели конвейеров,

Схема предусматривает два режима: местный (положение переключателя М) и дистанционный (Н). Местное управление
Схема предусматривает два режима: местный (положение переключателя М) и дистанционный (Н). Местное управление
Идеальным случаем работы конвейера является случай, когда eμ∙α=∞ и S3=0. так как величины
Идеальным случаем работы конвейера является случай, когда eμ∙α=∞ и S3=0. так как величины
Вспомогательные электроприводы ленточных конвейеров.
Системы управления конвейерными линиями
Значительным шагом вперёд в направлении
Вспомогательные электроприводы ленточных конвейеров.
Системы управления конвейерными линиями
Значительным шагом вперёд в направлении
Входом электронного регулятора служит падение напряжения, снимаемого с резистора R1 и узла сравнения
Входом электронного регулятора служит падение напряжения, снимаемого с резистора R1 и узла сравнения
Защита ленточных конвейеров от пробуксовки
Важнейшей защитой ленточных конвейеров является защита от пробуксовки
Защита ленточных конвейеров от пробуксовки
Важнейшей защитой ленточных конвейеров является защита от пробуксовки
Защита ленточных конвейеров от пробуксовки
Магнитоиндукционный датчик В состоит из постоянного магнита, снабжённого
Защита ленточных конвейеров от пробуксовки
Магнитоиндукционный датчик В состоит из постоянного магнита, снабжённого
Защита ленточных конвейеров от пробуксовки
Данная система имеет ряд недостатков, так как имеет
Защита ленточных конвейеров от пробуксовки
Данная система имеет ряд недостатков, так как имеет
Защита ленточных конвейеров от пробуксовки
Кардинальное решение проблем защиты от пробуксовки и разрушению
Защита ленточных конвейеров от пробуксовки
Кардинальное решение проблем защиты от пробуксовки и разрушению
Расчет характеристик асинхронного ЭП
с фазовым управлением в цепи ротора для конвейера
Блок-схема УПТФ
Расчет характеристик асинхронного ЭП
с фазовым управлением в цепи ротора для конвейера
Блок-схема УПТФ
Расчет характеристик асинхронного ЭП
с фазовым управлением в цепи ротора для конвейера
Пусковые характеристики
Расчет характеристик асинхронного ЭП
с фазовым управлением в цепи ротора для конвейера
Пусковые характеристики
Worsley (Aluminium), Australia
Total length 51 kmPower 15 MWOperational speed range 800–1000 rpmOverload during
Worsley (Aluminium), Australia
Total length 51 kmPower 15 MWOperational speed range 800–1000 rpmOverload during
 Dezvoltarea parteneriatului școală - familie - comunitate
Dezvoltarea parteneriatului școală - familie - comunitate Фото история юности
Фото история юности 20231105_velikolepnaya_semerka
20231105_velikolepnaya_semerka Измерение температуры. Классификация приборов. Термометры расширения. Манометрические, термоэлектрические термометры
Измерение температуры. Классификация приборов. Термометры расширения. Манометрические, термоэлектрические термометры Неотложные состояния в гастроэнтерологии
Неотложные состояния в гастроэнтерологии ВКР: прогнозирование отказов штангового глубинного насоса при помощи динамограмм
ВКР: прогнозирование отказов штангового глубинного насоса при помощи динамограмм Деловой стиль одежды
Деловой стиль одежды Жилищные льготы. Понятие, виды
Жилищные льготы. Понятие, виды Правила эксплуатации путевого инструмента
Правила эксплуатации путевого инструмента Вітаємо рідну школу
Вітаємо рідну школу Культура Древнего Рима
Культура Древнего Рима Вводное занятие 3. Тренинг
Вводное занятие 3. Тренинг Цифровая форма представления информации. Положительная и отрицательная логика
Цифровая форма представления информации. Положительная и отрицательная логика Корейская кухня
Корейская кухня Инструкции оператору по подготовке цементировочного агрегата к работе и выполнения цементирования скважины
Инструкции оператору по подготовке цементировочного агрегата к работе и выполнения цементирования скважины Побочные реакции и осложнения противоопухолевой медикаментозной терапии
Побочные реакции и осложнения противоопухолевой медикаментозной терапии Смешанные числа. 5 класс
Смешанные числа. 5 класс мастер класс Цветы из ленты зигзаг
мастер класс Цветы из ленты зигзаг Нарушение звукопроизношения и его коррекция в условиях дошкольного логопункта.
Нарушение звукопроизношения и его коррекция в условиях дошкольного логопункта. Ancient People
Ancient People Бионеорганическая химия. Жидкие среды организма. (Лекция 2)
Бионеорганическая химия. Жидкие среды организма. (Лекция 2) Презентация Чтим и помним наших братчан
Презентация Чтим и помним наших братчан Актуальность сохранения исторической застройки
Актуальность сохранения исторической застройки Архитектура персонального компьютера
Архитектура персонального компьютера Классификация иглокожих
Классификация иглокожих Архангельская область России
Архангельская область России Отношения объектов и их множеств
Отношения объектов и их множеств Основы пожарной безопасности в повседневной жизни
Основы пожарной безопасности в повседневной жизни