- Контроллеры последовательной передачи данных. Последовательный интерфейс

Содержание
- 2. Последовательный интерфейс Последовательный интерфейс – это аппаратное устройство для обмена информацией между элементами микропроцессорной техники по
- 3. ОСНОВНЫЕ ПОНЯТИЯ: единица информации при последовательном обмене называется символом, который может содержать от 5 до 8
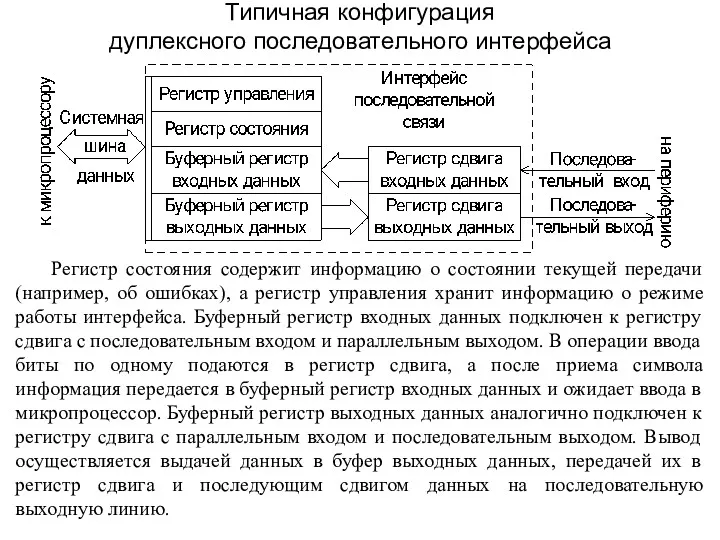
- 4. Типичная конфигурация дуплексного последовательного интерфейса Регистр состояния содержит информацию о состоянии текущей передачи (например, об ошибках),
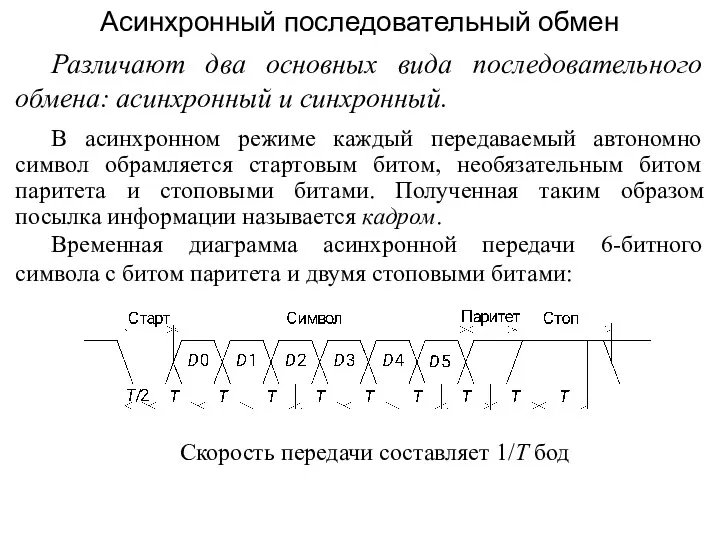
- 5. Асинхронный последовательный обмен Различают два основных вида последовательного обмена: асинхронный и синхронный. В асинхронном режиме каждый
- 6. Формат кадра должен быть согласован у приемника и передатчика, которые настраиваются на символ одной и той
- 7. Синхронная последовательная передача символа из 5–8 информационных бит с необязательным битом паритета, не имеет стартового и
- 8. Синхронный последовательный обмен. Характерные черты Допускается программирование числа информационных бит, наличия и вида паритета, числа и
- 9. Программируемый связной интерфейс. (Реализация последовательного интерфейса обмена данными)
- 10. Программируемый связной интерфейс (ПСИ) Программируемый связной адаптер (ПСА) К580ВВ51 представляет собой универсальный синхронно-асинхронный приемопередатчик УСАПП (USART,
- 11. Структура ПСА К580ВВ51 Буфер данных Блок управления записью/чтением Блок управления модемом Буфер передатчика Схема управления передатчиком
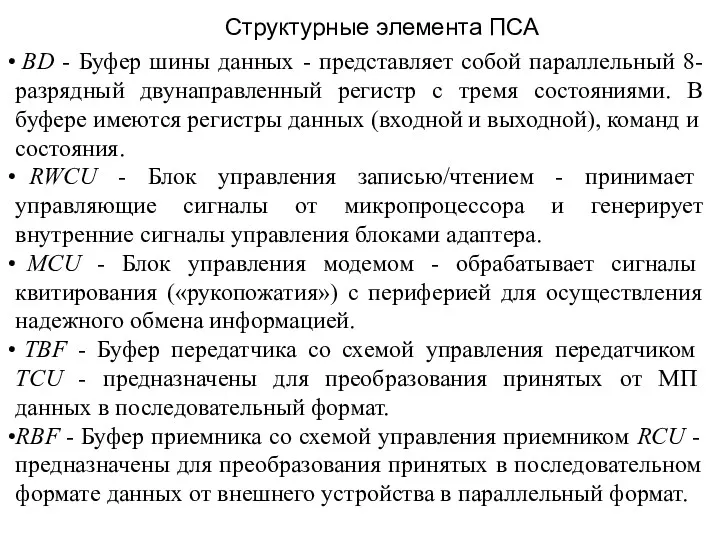
- 12. Структурные элемента ПСА BD - Буфер шины данных - представляет собой параллельный 8-разрядный двунаправленный регистр с
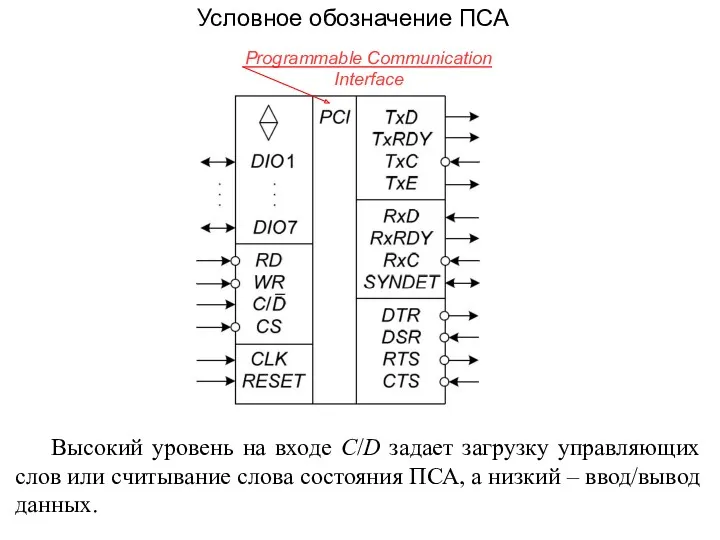
- 13. Условное обозначение ПСА Programmable Сommunication Interface Высокий уровень на входе C/D задает загрузку управляющих слов или
- 14. Таблица истинности сигналов блока RWCU Адаптер имеет набор управляющих входных и выходных сигналов для управления модемом,
- 15. Назначение выводов ПСА Вход DSR (Data Set Ready) – готовность данных для передачи – сигнал запроса
- 16. Назначение выводов ПСА Выводы TxD (Transmitter Data) – данные передатчика и RxD (Receiver Data) – данные
- 17. Назначение выводов ПСА Вывод TxE (Transmitter Empty) – передатчик пуст – выход, активизирующийся при отсутствии в
- 18. Программирование и работа с ПСА модели К580ВВ51
- 19. Режим работы адаптера и его поведение определяется форматом управляющих слов – инструкции режима и команды управления.
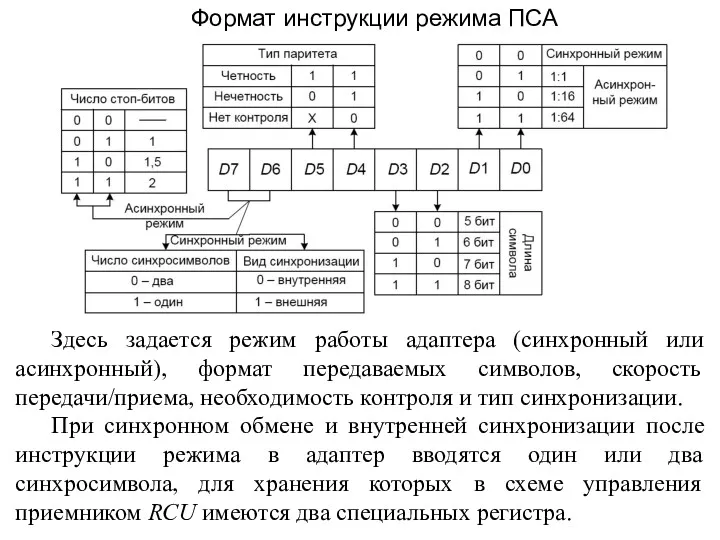
- 20. Формат инструкции режима ПСА Здесь задается режим работы адаптера (синхронный или асинхронный), формат передаваемых символов, скорость
- 21. После синхросимволов или непосредственно после инструкции режима, если задан режим асинхронного обмена или синхронного обмена с
- 22. Правильная загрузка нескольких регистров без индивидуальных адресов у них обеспечивается жестким порядком записи в ПСА управляющих
- 23. Кроме уже рассмотренных сигналов в слове состояния формируются три флага ошибок: разряд D3 устанавливается при возникновении
- 25. Скачать презентацию
Последовательный интерфейс
Последовательный интерфейс – это аппаратное устройство для обмена информацией
Последовательный интерфейс
Последовательный интерфейс – это аппаратное устройство для обмена информацией
ОСНОВНЫЕ ПОНЯТИЯ:
единица информации при последовательном обмене называется символом, который может
ОСНОВНЫЕ ПОНЯТИЯ:
единица информации при последовательном обмене называется символом, который может
Типичная конфигурация
дуплексного последовательного интерфейса
Регистр состояния содержит информацию о состоянии текущей
Типичная конфигурация
дуплексного последовательного интерфейса
Регистр состояния содержит информацию о состоянии текущей
Асинхронный последовательный обмен
Различают два основных вида последовательного обмена: асинхронный и синхронный.
В
Асинхронный последовательный обмен
Различают два основных вида последовательного обмена: асинхронный и синхронный.
В
Формат кадра должен быть согласован у приемника и передатчика, которые настраиваются
Формат кадра должен быть согласован у приемника и передатчика, которые настраиваются
Синхронная последовательная передача символа из 5–8 информационных бит с необязательным
Синхронная последовательная передача символа из 5–8 информационных бит с необязательным
Синхронный последовательный обмен.
Характерные черты
Допускается программирование числа информационных бит, наличия и
Синхронный последовательный обмен.
Характерные черты
Допускается программирование числа информационных бит, наличия и
Программируемый связной интерфейс.
(Реализация последовательного интерфейса
обмена данными)
Программируемый связной интерфейс.
(Реализация последовательного интерфейса
обмена данными)
Программируемый связной интерфейс (ПСИ)
Программируемый связной адаптер (ПСА) К580ВВ51 представляет собой универсальный
Программируемый связной интерфейс (ПСИ)
Программируемый связной адаптер (ПСА) К580ВВ51 представляет собой универсальный
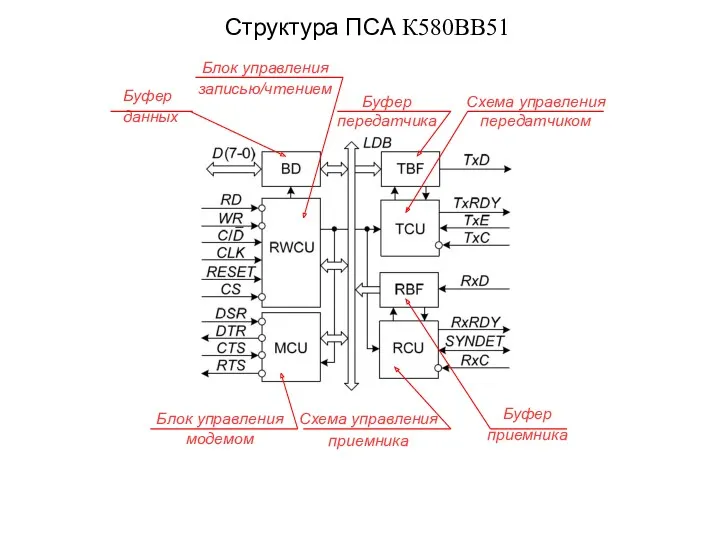
Структура ПСА К580ВВ51
Буфер данных
Блок управления записью/чтением
Блок управления модемом
Буфер
Структура ПСА К580ВВ51
Буфер данных
Блок управления записью/чтением
Блок управления модемом
Буфер
Структурные элемента ПСА
BD - Буфер шины данных - представляет собой
Структурные элемента ПСА
BD - Буфер шины данных - представляет собой
Условное обозначение ПСА
Programmable Сommunication Interface
Высокий уровень на входе C/D задает загрузку
Условное обозначение ПСА
Programmable Сommunication Interface
Высокий уровень на входе C/D задает загрузку
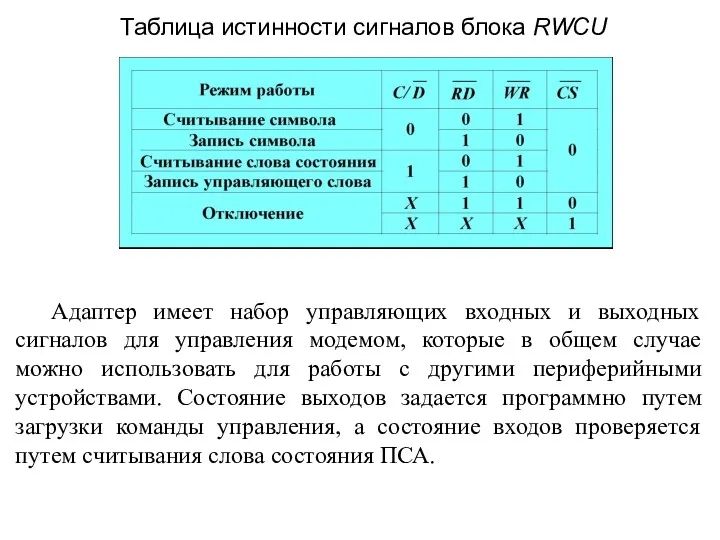
Таблица истинности сигналов блока RWCU
Адаптер имеет набор управляющих входных и выходных
Таблица истинности сигналов блока RWCU
Адаптер имеет набор управляющих входных и выходных
Назначение выводов ПСА
Вход DSR (Data Set Ready) – готовность данных
Назначение выводов ПСА
Вход DSR (Data Set Ready) – готовность данных
Назначение выводов ПСА
Выводы TxD (Transmitter Data) – данные передатчика и
Назначение выводов ПСА
Выводы TxD (Transmitter Data) – данные передатчика и
Назначение выводов ПСА
Вывод TxE (Transmitter Empty) – передатчик пуст –
Назначение выводов ПСА
Вывод TxE (Transmitter Empty) – передатчик пуст –
Программирование и работа с ПСА
модели К580ВВ51
Программирование и работа с ПСА
модели К580ВВ51
Режим работы адаптера и его поведение определяется форматом управляющих слов –
Режим работы адаптера и его поведение определяется форматом управляющих слов –
Формат инструкции режима ПСА
Здесь задается режим работы адаптера (синхронный или асинхронный),
Формат инструкции режима ПСА
Здесь задается режим работы адаптера (синхронный или асинхронный),
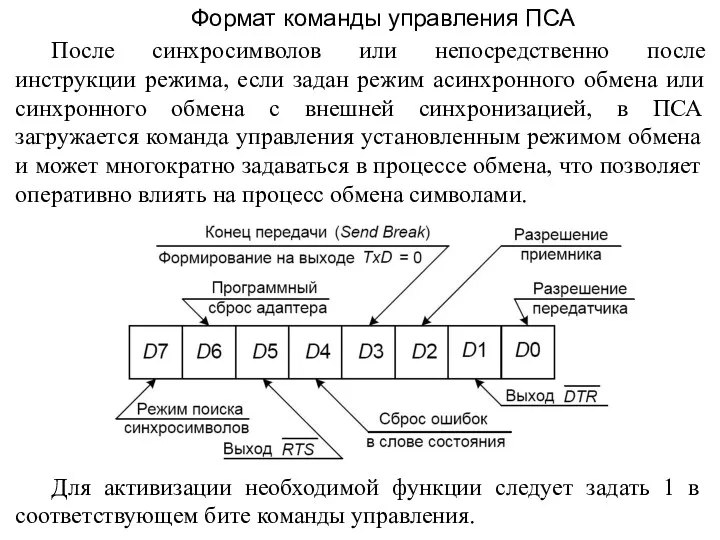
После синхросимволов или непосредственно после инструкции режима, если задан режим асинхронного
После синхросимволов или непосредственно после инструкции режима, если задан режим асинхронного
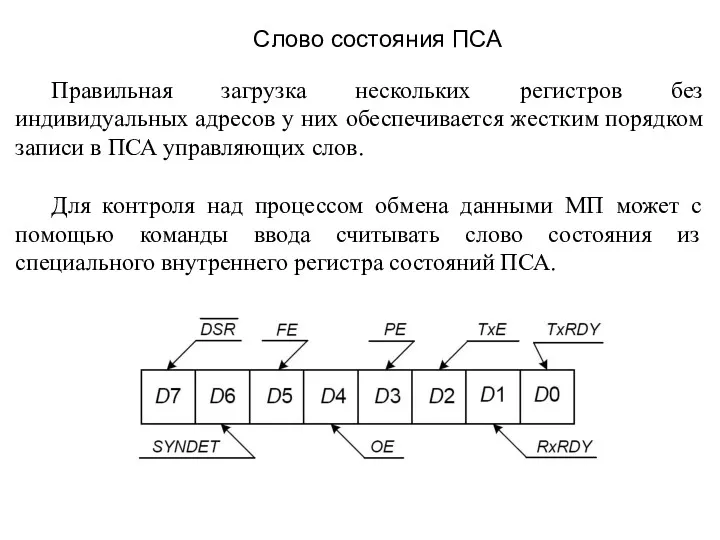
Правильная загрузка нескольких регистров без индивидуальных адресов у них обеспечивается жестким
Правильная загрузка нескольких регистров без индивидуальных адресов у них обеспечивается жестким
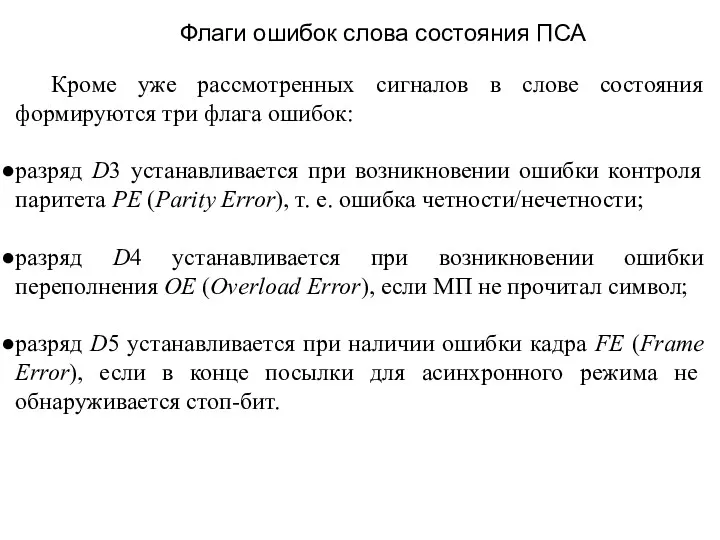
Кроме уже рассмотренных сигналов в слове состояния формируются три флага ошибок:
разряд
Кроме уже рассмотренных сигналов в слове состояния формируются три флага ошибок:
разряд
 Школьная форма - это норма или каприз?
Школьная форма - это норма или каприз? Презентация Прочитай слова, найди картинки
Презентация Прочитай слова, найди картинки Информатика – базовые определения и понятия
Информатика – базовые определения и понятия Технология штукатурных работ
Технология штукатурных работ Однофазный синусоидальный ток
Однофазный синусоидальный ток Михаил Афанасьевич Булгаков Роман Мастер и Маргарита
Михаил Афанасьевич Булгаков Роман Мастер и Маргарита город Чапаевск, Самарской области
город Чапаевск, Самарской области Презентация Звуки и буквы
Презентация Звуки и буквы Россия в Первой мировой войне
Россия в Первой мировой войне Рекомендации родителям первоклассников
Рекомендации родителям первоклассников Типовые нарушения функций почек
Типовые нарушения функций почек День знаний в 1 классе.
День знаний в 1 классе. внеклассное мероприятие в 11 классе смертная казнь: за или против
внеклассное мероприятие в 11 классе смертная казнь: за или против Презентация №1 к уроку математики в 5 классе Обыкновенные дроби
Презентация №1 к уроку математики в 5 классе Обыкновенные дроби История игрушек
История игрушек ПРЕЗЕНТАЦИЯ Квадратичная функция для 9АБ
ПРЕЗЕНТАЦИЯ Квадратичная функция для 9АБ Пятичленные гетероциклы с двумя гетероатомами - азолы
Пятичленные гетероциклы с двумя гетероатомами - азолы Основные понятия: формы самостоятельных занятий, мотивация выбора
Основные понятия: формы самостоятельных занятий, мотивация выбора Refrigerant systems and their energy performance
Refrigerant systems and their energy performance Возникновение религий. Религии мира и их основатели
Возникновение религий. Религии мира и их основатели Разработка информационно-измерительной системы контроля и учёта энергоресурсов на базе сумматора СЭМ-2.01 завода
Разработка информационно-измерительной системы контроля и учёта энергоресурсов на базе сумматора СЭМ-2.01 завода Селекция на декоративность древесины
Селекция на декоративность древесины Тема любви в творчестве Ф.И. Тютчева
Тема любви в творчестве Ф.И. Тютчева Организация подведения итогов боевой и государственно-правовой подготовки, состояния воинской дисциплины (тема 29)
Организация подведения итогов боевой и государственно-правовой подготовки, состояния воинской дисциплины (тема 29) Ατομικη Εργασια
Ατομικη Εργασια Бытовые приборы
Бытовые приборы Выпускная квалификационная работа. Тема. Шаблон. Банковское дело
Выпускная квалификационная работа. Тема. Шаблон. Банковское дело Урок-презентация по СБО Овощи и фрукты и их польза
Урок-презентация по СБО Овощи и фрукты и их польза