- Lektsia_4

Содержание
- 2. Электропривод. Ч.1 Модель асинхронного электродвигателя. Достоинства асинхронного электродвигателя: простота конструкции; низкая металлоемкость; допускает прямой пуск от
- 3. Электропривод. Ч.1 Модель асинхронного электродвигателя. Асинхронного электродвигатели изготавливают двух типов с фазным и короткозамкнутым ротором. 0
- 4. Электропривод. Ч.1 Модель асинхронного электродвигателя. Электродвигатели с короткозамкнутым ротором имеют обмотку ротора в виде «беличьей клетки».
- 5. Электропривод. Ч.1 Модель асинхронного электродвигателя.
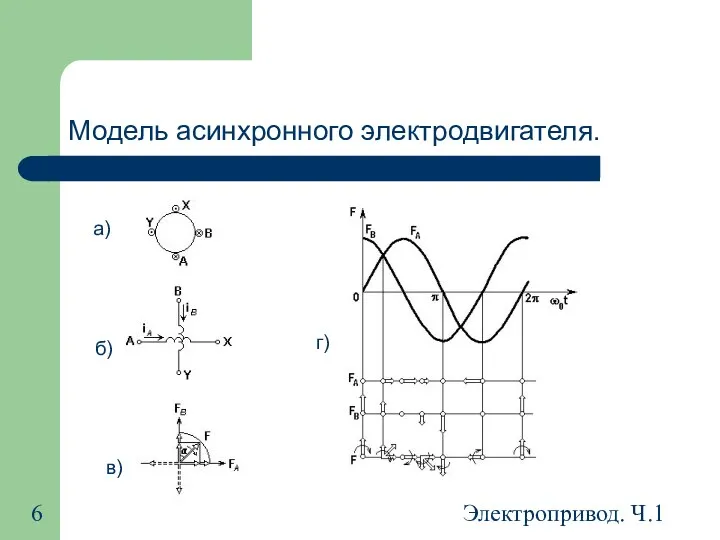
- 6. Электропривод. Ч.1 Модель асинхронного электродвигателя. а) б) в) г)
- 7. Электропривод. Ч.1 Модель асинхронного электродвигателя. Пусть на статоре расположена катушка А-Х по которой протекает переменный ток
- 8. Электропривод. Ч.1 Модель асинхронного электродвигателя. Если добавить катушку В-Y, расположенную под углом 900 и пропускать по
- 9. Электропривод. Ч.1 Модель асинхронного электродвигателя. Вектор результирующей МДС имеет модуль Его фаза α определится из условия
- 10. Электропривод. Ч.1 Модель асинхронного электродвигателя.
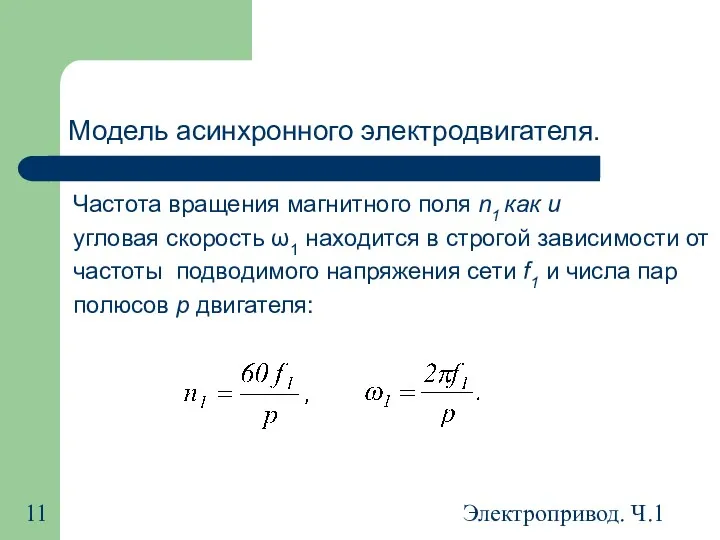
- 11. Электропривод. Ч.1 Модель асинхронного электродвигателя. Частота вращения магнитного поля n1 как и угловая скорость ω1 находится
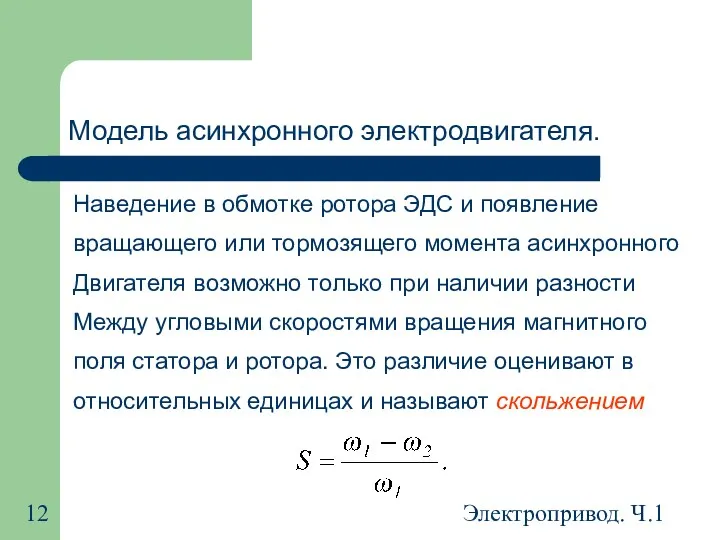
- 12. Электропривод. Ч.1 Наведение в обмотке ротора ЭДС и появление вращающего или тормозящего момента асинхронного Двигателя возможно
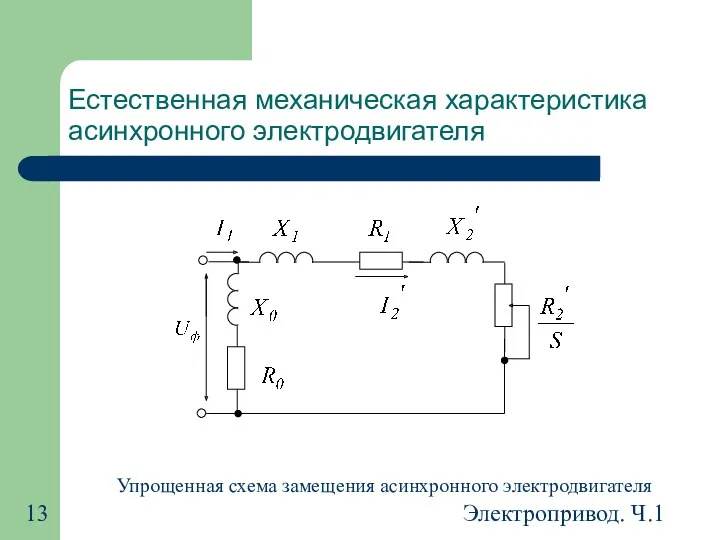
- 13. Электропривод. Ч.1 Естественная механическая характеристика асинхронного электродвигателя
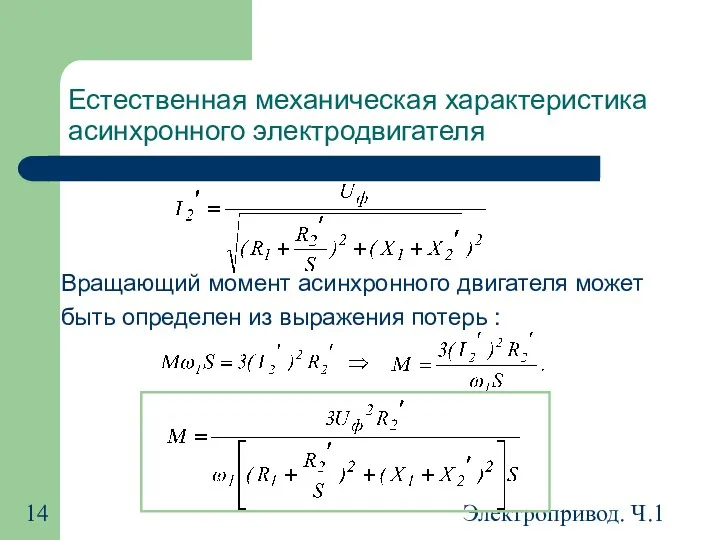
- 14. Электропривод. Ч.1 Естественная механическая характеристика асинхронного электродвигателя Вращающий момент асинхронного двигателя может быть определен из выражения
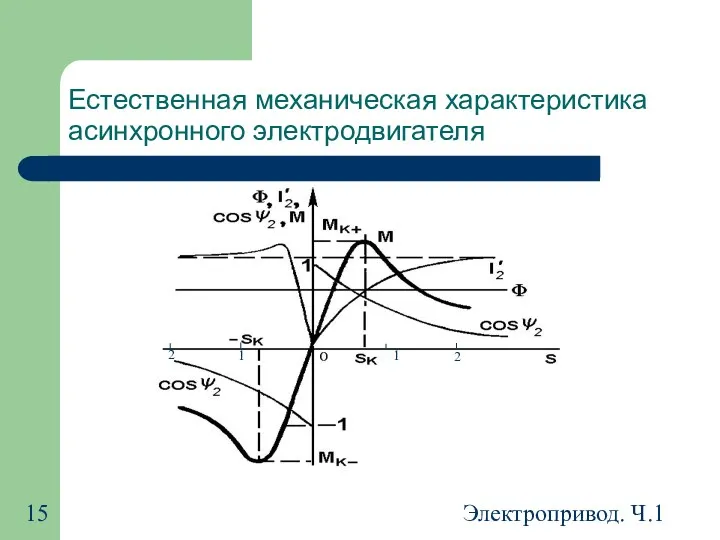
- 15. Электропривод. Ч.1 Естественная механическая характеристика асинхронного электродвигателя 1 2 2 1
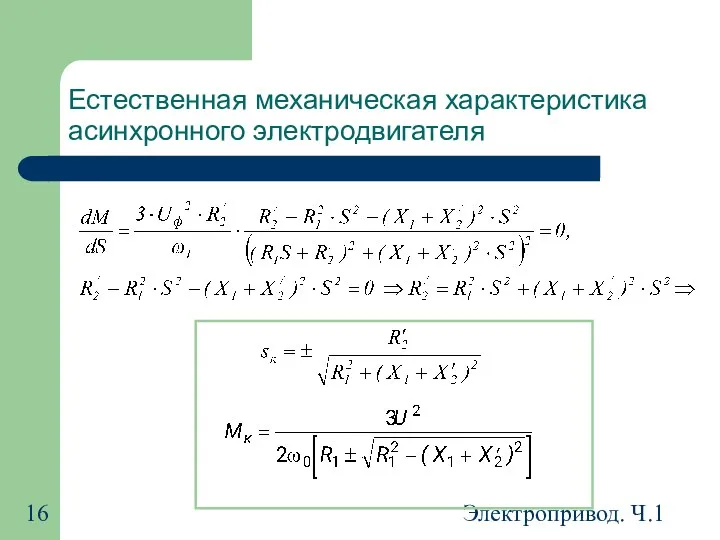
- 16. Электропривод. Ч.1 Естественная механическая характеристика асинхронного электродвигателя
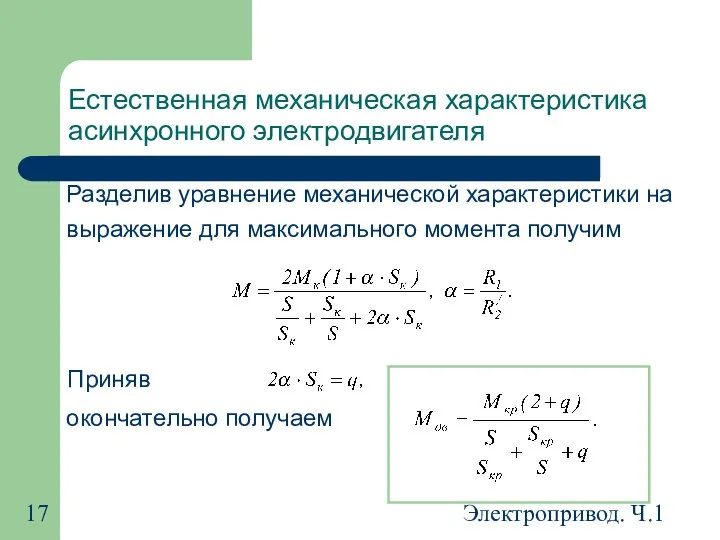
- 17. Электропривод. Ч.1 Естественная механическая характеристика асинхронного электродвигателя
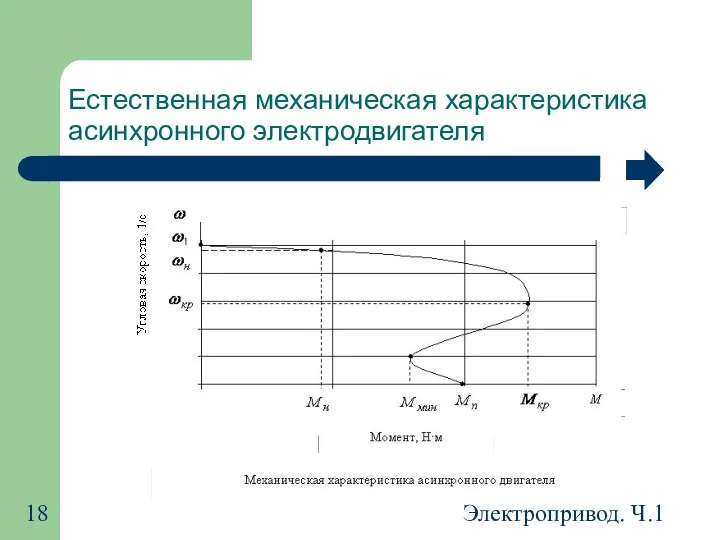
- 18. Электропривод. Ч.1 Естественная механическая характеристика асинхронного электродвигателя
- 19. Электропривод. Ч.1 Естественная механическая характеристика асинхронного электродвигателя Характерными точками механической характеристики являются: пусковая точка – М=Мп;
- 20. Электропривод. Ч.1 Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов Отсутствие пропорциональности между моментом двигателя и током
- 21. Электропривод. Ч.1 Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов Для повышения начального пускового момента и снижения
- 22. Электропривод. Ч.1 Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов У двигателей с контактными кольцами начальный пусковой
- 23. Электропривод. Ч.1 Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов К расчету пускового реостата асинхронного двигателя Mн
- 24. Электропривод. Ч.1 Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов Методика расчета: на характеристике Мдв=f(ω), наносятся границы
- 25. Электропривод. Ч.1 Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов в точке с координатами Мпуск мин, ω=ω3
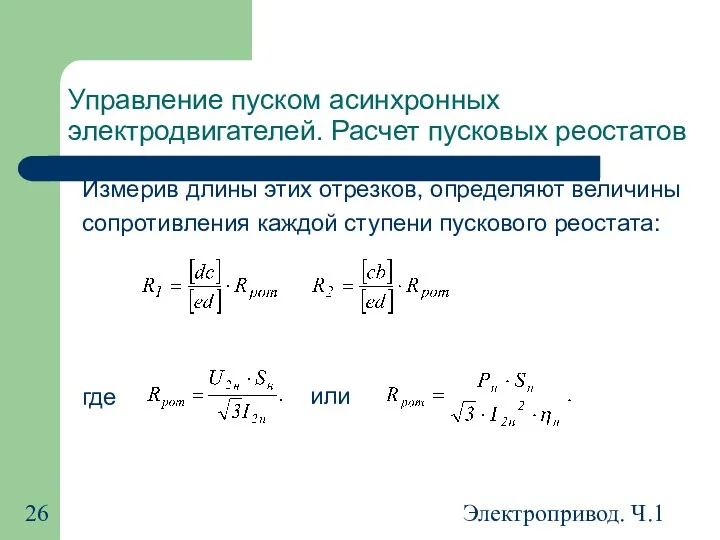
- 26. Электропривод. Ч.1 Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов Измерив длины этих отрезков, определяют величины сопротивления
- 27. Электропривод. Ч.1 Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов При реостатном пуске асинхронного электродвигателя с контактными
- 28. Электропривод. Ч.1 Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов Для обеспечения заданной диаграммы пуска необходима фиксация
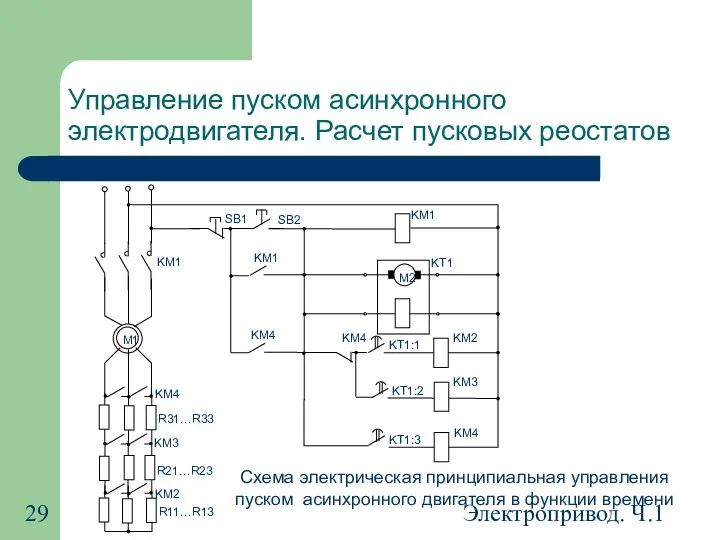
- 29. Электропривод. Ч.1 Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
- 31. Скачать презентацию
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Достоинства асинхронного электродвигателя:
простота конструкции;
низкая металлоемкость;
допускает прямой пуск от
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Достоинства асинхронного электродвигателя:
простота конструкции;
низкая металлоемкость;
допускает прямой пуск от
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Асинхронного
электродвигатели
изготавливают
двух типов с
фазным и
короткозамкнутым
ротором.
0
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Асинхронного
электродвигатели
изготавливают
двух типов с
фазным и
короткозамкнутым
ротором.
0
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Электродвигатели с короткозамкнутым ротором
имеют обмотку ротора в
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Электродвигатели с короткозамкнутым ротором
имеют обмотку ротора в
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Электропривод. Ч.1
Модель асинхронного электродвигателя.
а)
б)
в)
г)
Электропривод. Ч.1
Модель асинхронного электродвигателя.
а)
б)
в)
г)
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Пусть на статоре расположена катушка А-Х по
которой протекает
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Пусть на статоре расположена катушка А-Х по
которой протекает
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Если добавить катушку В-Y, расположенную под углом
900 и
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Если добавить катушку В-Y, расположенную под углом
900 и
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Вектор результирующей МДС имеет модуль
Его фаза α определится
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Вектор результирующей МДС имеет модуль
Его фаза α определится
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Частота вращения магнитного поля n1 как и
угловая скорость
Электропривод. Ч.1
Модель асинхронного электродвигателя.
Частота вращения магнитного поля n1 как и
угловая скорость
Электропривод. Ч.1
Наведение в обмотке ротора ЭДС и появление
вращающего или тормозящего момента
Электропривод. Ч.1
Наведение в обмотке ротора ЭДС и появление
вращающего или тормозящего момента
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Вращающий момент асинхронного двигателя может
быть
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Вращающий момент асинхронного двигателя может
быть
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
1
2
2
1
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
1
2
2
1
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Характерными точками механической характеристики
являются:
пусковая точка
Электропривод. Ч.1
Естественная механическая характеристика асинхронного электродвигателя
Характерными точками механической характеристики
являются:
пусковая точка
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Отсутствие пропорциональности между моментом
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Отсутствие пропорциональности между моментом
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Для повышения начального пускового
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Для повышения начального пускового
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
У двигателей с контактными
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
У двигателей с контактными

Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
К расчету пускового реостата
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
К расчету пускового реостата
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Методика расчета:
на характеристике
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Методика расчета:
на характеристике
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
в точке с координатами
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
в точке с координатами
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Измерив длины этих отрезков,
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
Измерив длины этих отрезков,
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
При реостатном пуске асинхронного
Электропривод. Ч.1
Управление пуском асинхронных электродвигателей. Расчет пусковых реостатов
При реостатном пуске асинхронного
Электропривод. Ч.1
Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
Для обеспечения заданной диаграммы
Электропривод. Ч.1
Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
Для обеспечения заданной диаграммы
Электропривод. Ч.1
Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
Электропривод. Ч.1
Управление пуском асинхронного электродвигателя. Расчет пусковых реостатов
 Смутное время
Смутное время Приглашение к молитве
Приглашение к молитве Загрязнение воздуха в России
Загрязнение воздуха в России Понятие об инфекционном процессе и инфекционных болезнях
Понятие об инфекционном процессе и инфекционных болезнях презентация на конкурсе Учитель года 2015 Через компетенции к вершинам успеха
презентация на конкурсе Учитель года 2015 Через компетенции к вершинам успеха презентация к дню матери
презентация к дню матери электронно дидактическая игра Безопасность дома и на улице
электронно дидактическая игра Безопасность дома и на улице Конструктивное моделирование юбок без изменения объемной формы
Конструктивное моделирование юбок без изменения объемной формы Магический реализм в творчестве Г. Г. Маркеса
Магический реализм в творчестве Г. Г. Маркеса The Beatles - британская рок-группа из Ливерпуля
The Beatles - британская рок-группа из Ливерпуля Детский православный журнал Божий лучик
Детский православный журнал Божий лучик Артикуляционная гимнастика с биоэнергопластикой
Артикуляционная гимнастика с биоэнергопластикой Петербургские традиции
Петербургские традиции Мировое хозяйство 10 кл по Максаковскому В П
Мировое хозяйство 10 кл по Максаковскому В П Как написать отзыв о прочитанной книге
Как написать отзыв о прочитанной книге Факторный анализ причин отказов скважин
Факторный анализ причин отказов скважин презентация Мой 1 класс
презентация Мой 1 класс Электронные выпрямители. Классификация. Идеализация схем выпрямления
Электронные выпрямители. Классификация. Идеализация схем выпрямления Луч света в нашем царстве (Рациональное и нерациональное использование электроэнергии дома и в школе)
Луч света в нашем царстве (Рациональное и нерациональное использование электроэнергии дома и в школе) Творческий проект Семейные реликвии военных лет
Творческий проект Семейные реликвии военных лет Использование системы альтернативной коммуникации с помощью карточек (PECS) в работе с детьми с ОВЗ
Использование системы альтернативной коммуникации с помощью карточек (PECS) в работе с детьми с ОВЗ d9-8045ce6a
d9-8045ce6a Адаптивные фильтры. Практическое применение (3)
Адаптивные фильтры. Практическое применение (3) профессии на транспорте
профессии на транспорте Литейное производство. Материалы, оборудование, принципиальная схема литья
Литейное производство. Материалы, оборудование, принципиальная схема литья Раздел 1. Теоретико-методологические основы макроэкономического планирования. Тема 1. Макроэкономическое планирование
Раздел 1. Теоретико-методологические основы макроэкономического планирования. Тема 1. Макроэкономическое планирование Пакт Молотова - Риббентропа
Пакт Молотова - Риббентропа Медико-социальные аспекты демографии
Медико-социальные аспекты демографии