- Лекция 8 проектирование АТК. Системы электропривода конвейеров 2

Содержание
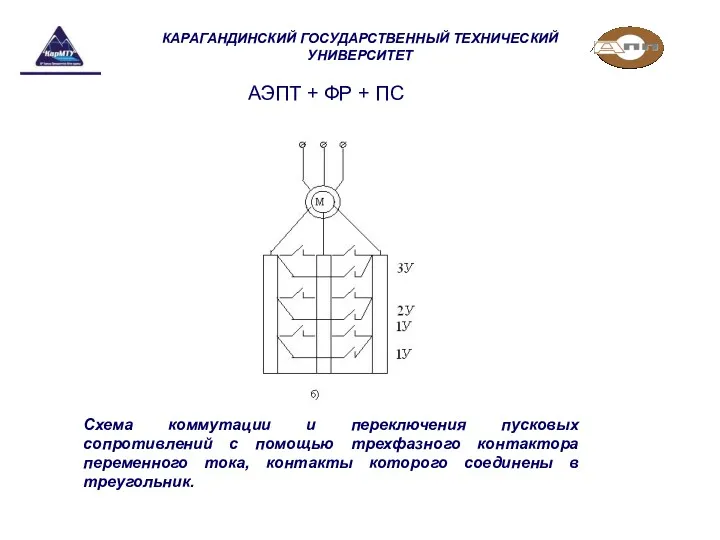
- 2. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Схема коммутации и переключения пусковых сопротивлений с помощью трехфазного контактора переменного тока,
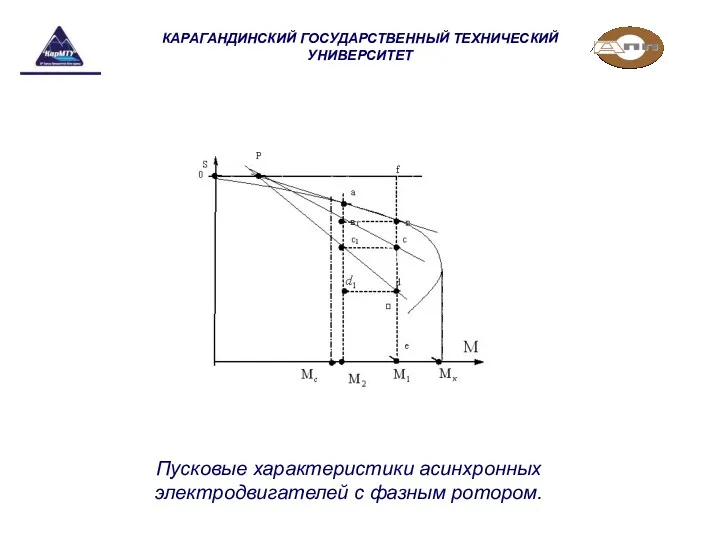
- 3. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Пусковые характеристики асинхронных электродвигателей с фазным ротором.
- 4. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Точный метод расчета ступеней пускового сопротивления в роторе АД При расчете пусковых
- 5. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Задавшись моментами М1 и М2, находят на естественной характеристике точки а и
- 6. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ При этом необходимо задаться скольжениями на искусственной характеристике Su, соответствующими уровням переключения
- 7. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Это графоаналитический метод расчета. Используется при наличии семейства универсальных механических характеристик, на
- 8. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Приближенный метод расчета ступеней пускового сопротивления в роторной цепи АД. Аналитический метод,
- 9. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Для нормального пуска: Sн - номинальное скольжение АД; m – количество пусковых
- 10. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Величины сопротивлений отдельных пусковых ступеней, находятся по соотношениям (в абсолютных или относительных
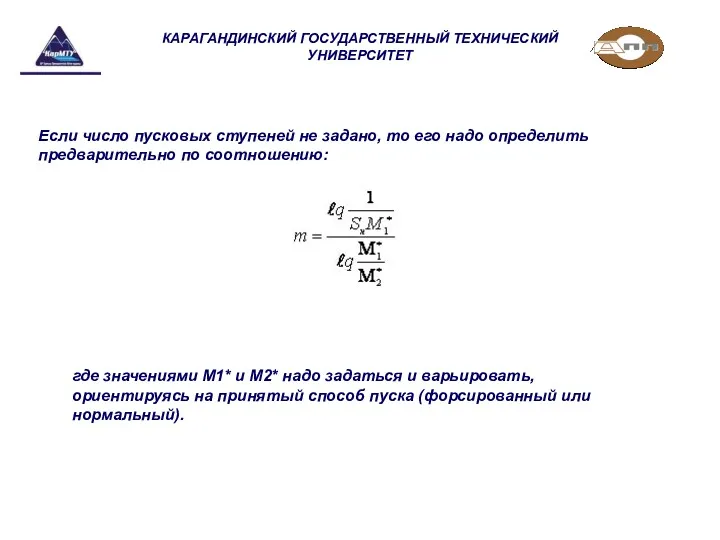
- 11. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Если число пусковых ступеней не задано, то его надо определить предварительно по
- 12. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Достоинства электропривода АЭПТ + ФР + ПС Увеличенный пусковой момент. Возможность формирования
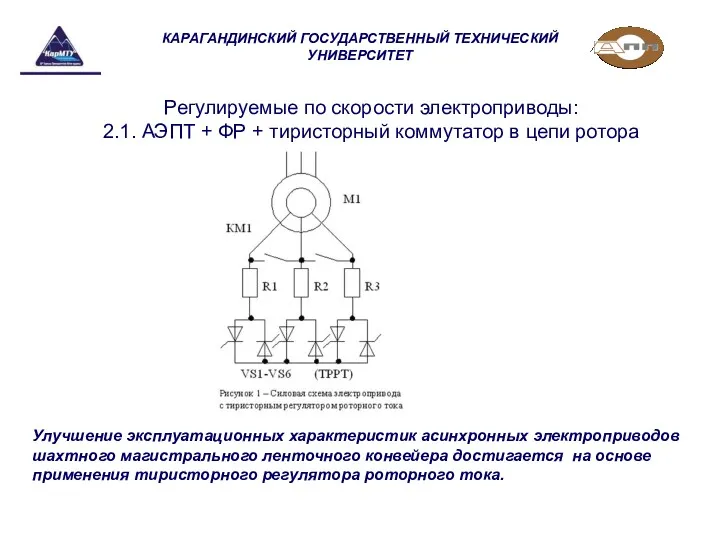
- 13. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Регулируемые по скорости электроприводы: 2.1. АЭПТ + ФР + тиристорный коммутатор в
- 14. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Силовая схема содержит тиристорный коммутатор (на трёх парах встречно-параллельно соединённых тиристоров), включенных
- 15. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ТРРТ позволяет получать семейство искусственных механических характеристик 1 – 3) двигателя с
- 16. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Замкнутая схема импульсного регулирования скорости асинхронного двигателя с помощью резистора в цепи
- 17. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Rср = Rр + Rдоп(1-Y), где Y = t / T Y
- 18. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Достоинства электропривода АЭПТ + ФР + тиристорный коммутатор в цепи ротора Возможности
- 19. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Промышленные устройства плавного пуска серии УПТФ для асинхронных двигателей с фазным ротором
- 20. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
- 21. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ БСЗ - блок синхронизации и защиты; БСРА - блок согласования, реле и
- 22. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ УПТФ для многодвигательного мощного конвейера обеспечивает: Плавное нарастание момента электродвигателей до начала
- 23. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ За счет формирования благоприятных характеристик пуска электродвигателей (выбора зазоров, люфтов, плавного натяжения
- 24. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Широкое применение УПП типа УПТФ на конвейерах оправданно при редких пусках и
- 25. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ При значении пускового момента М*п = 1,3 пуск одного приводного электродвигателя груженого
- 26. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ Величина электроэнергии, затрачиваемая на нагрев пусковых роторных сопротивлений одного УПТФ при работе
- 27. КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ При снижении скорости нагруженного конвейера с помощью УПП типа УПТФ на непроизводительный
- 29. Скачать презентацию
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Схема коммутации и переключения пусковых сопротивлений с
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Схема коммутации и переключения пусковых сопротивлений с
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Пусковые характеристики асинхронных электродвигателей с фазным ротором.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Пусковые характеристики асинхронных электродвигателей с фазным ротором.
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Точный метод расчета ступеней пускового сопротивления в роторе
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Точный метод расчета ступеней пускового сопротивления в роторе
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Задавшись моментами М1 и М2, находят на естественной
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Задавшись моментами М1 и М2, находят на естественной
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
При этом необходимо задаться скольжениями на искусственной характеристике
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
При этом необходимо задаться скольжениями на искусственной характеристике
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Это графоаналитический метод расчета. Используется при наличии семейства
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Это графоаналитический метод расчета. Используется при наличии семейства
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Приближенный метод расчета ступеней пускового сопротивления в роторной
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Приближенный метод расчета ступеней пускового сопротивления в роторной
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Для нормального пуска:
Sн - номинальное скольжение АД;
m –
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Для нормального пуска:
Sн - номинальное скольжение АД;
m –
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Величины сопротивлений отдельных пусковых ступеней, находятся по соотношениям
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Величины сопротивлений отдельных пусковых ступеней, находятся по соотношениям
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Если число пусковых ступеней не задано, то его
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Если число пусковых ступеней не задано, то его
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Достоинства электропривода АЭПТ + ФР + ПС
Увеличенный пусковой
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Достоинства электропривода АЭПТ + ФР + ПС
Увеличенный пусковой
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Регулируемые по скорости электроприводы:
2.1. АЭПТ + ФР +
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Регулируемые по скорости электроприводы:
2.1. АЭПТ + ФР +
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Силовая схема содержит тиристорный коммутатор (на трёх парах
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Силовая схема содержит тиристорный коммутатор (на трёх парах

КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ТРРТ позволяет получать семейство искусственных механических характеристик 1
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
ТРРТ позволяет получать семейство искусственных механических характеристик 1

КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Замкнутая схема импульсного регулирования скорости асинхронного двигателя с
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Замкнутая схема импульсного регулирования скорости асинхронного двигателя с
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Rср = Rр + Rдоп(1-Y), где Y =
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Rср = Rр + Rдоп(1-Y), где Y =
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Достоинства электропривода АЭПТ + ФР + тиристорный коммутатор
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Достоинства электропривода АЭПТ + ФР + тиристорный коммутатор
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Промышленные устройства плавного пуска серии УПТФ для асинхронных
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Промышленные устройства плавного пуска серии УПТФ для асинхронных

КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
БСЗ - блок синхронизации и защиты; БСРА -
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
БСЗ - блок синхронизации и защиты; БСРА -
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
УПТФ для многодвигательного мощного конвейера обеспечивает:
Плавное нарастание момента
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
УПТФ для многодвигательного мощного конвейера обеспечивает:
Плавное нарастание момента
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
За счет формирования благоприятных характеристик пуска электродвигателей (выбора
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
За счет формирования благоприятных характеристик пуска электродвигателей (выбора
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Широкое применение УПП типа УПТФ на конвейерах оправданно
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Широкое применение УПП типа УПТФ на конвейерах оправданно
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
При значении пускового момента М*п = 1,3 пуск
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
При значении пускового момента М*п = 1,3 пуск
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Величина электроэнергии, затрачиваемая на нагрев пусковых роторных сопротивлений
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
Величина электроэнергии, затрачиваемая на нагрев пусковых роторных сопротивлений
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
При снижении скорости нагруженного конвейера с помощью УПП
КАРАГАНДИНСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
При снижении скорости нагруженного конвейера с помощью УПП
 Пропорции тела человека. Задачи
Пропорции тела человека. Задачи Дистанционное обучение 25102
Дистанционное обучение 25102 Теломераза и старение
Теломераза и старение Родительское собрание Проектная деятельность
Родительское собрание Проектная деятельность Презентация Правила личной гигиены
Презентация Правила личной гигиены Телепередача В мире перелетных птиц
Телепередача В мире перелетных птиц Наши классные Олимпийские игры .
Наши классные Олимпийские игры . программа Семейный очаг
программа Семейный очаг Страницы истории ХIХ века
Страницы истории ХIХ века Курумканский район
Курумканский район Сложные предложения с различными видами связи
Сложные предложения с различными видами связи Особенности социальной политики России в системе государственного управления
Особенности социальной политики России в системе государственного управления Развитие творческой активности учащихся через проектную деятельность (презентация)
Развитие творческой активности учащихся через проектную деятельность (презентация) Система вентиляции дома
Система вентиляции дома Мой профессиональный выбор. Профессия Мастер ногтевого сервиса
Мой профессиональный выбор. Профессия Мастер ногтевого сервиса Средства наружной терапии в дерматологии
Средства наружной терапии в дерматологии Игра Угадай мелодию
Игра Угадай мелодию Углерод и его соединения
Углерод и его соединения С днем мамы
С днем мамы Вазоренальная гипертензия
Вазоренальная гипертензия Презентация к уроку Семяя в православной традиции
Презентация к уроку Семяя в православной традиции Организация памяти ЭВМ. (Лекция 3)
Организация памяти ЭВМ. (Лекция 3) Виртуальное путешествие на уроке
Виртуальное путешествие на уроке Научи свое сердце добру
Научи свое сердце добру Этапы развития искусства Ренессанса
Этапы развития искусства Ренессанса Социально-образовательный проект Клуб английского языка Step by Step
Социально-образовательный проект Клуб английского языка Step by Step Змея (Оригами)
Змея (Оригами) Зачем чистить зубы
Зачем чистить зубы