- Машины постоянного тока

Содержание
- 2. Назначение и области применения МПТ Электрические машины постоянного тока Как звенья САР; усилители электрических сигналов управления;
- 3. Возьмем устройство, состоящее из двух магнитных полюсов создающих постоянное магнитное поле, и якоря – стального цилиндра
- 4. Электрическая машина постоянного тока состоит из двух основных частей: неподвижной части (индуктора) и вращающейся части (
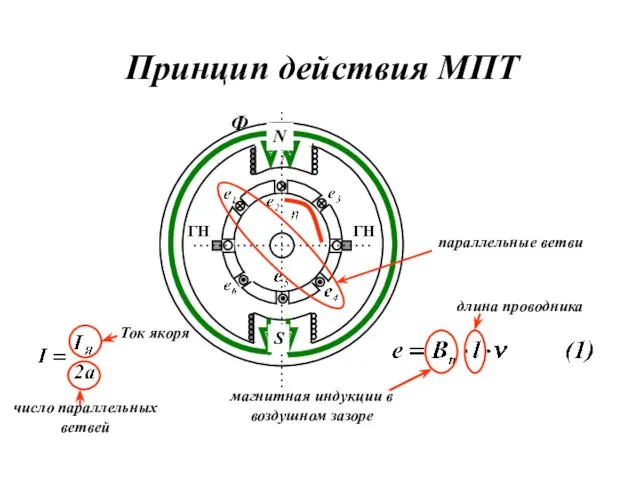
- 5. Принцип действия МПТ N S
- 6. Принцип действия машины постоянного тока Рассмотрим работу машины постоянного тока на представленной модели: Проводники якорной обмотки
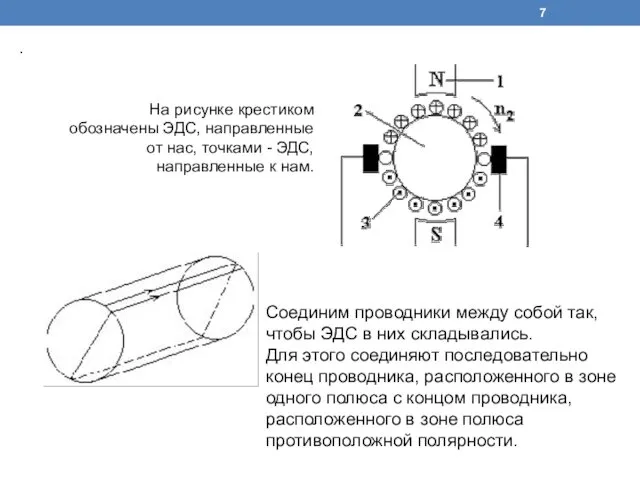
- 7. . На рисунке крестиком обозначены ЭДС, направленные от нас, точками - ЭДС, направленные к нам. Соединим
- 8. Два проводника, соединенные последовательно, образуют один виток или одну катушку. ЭДС проводников, расположенных в зоне одного
- 10. В реальных электрических машинах постоянного тока используется специальное контактное устройство - коллектор. Коллектор устанавливается на одном
- 11. Принцип действия электрических машин постоянного тока (МПТ) основывается на взаимодействии постоянного магнитного поля и проводника с
- 12. Двигатели: Через коллектор и щетки в рамку подается постоянный ток, который взаимодействует с постоянным магнитным полем
- 13. Преимущества МПТ ГПТ Жесткая внешняя характеристика, Хорошие регулировочные свойства, Возможность использования в автоматических линиях ДПТ -Лучшие
- 14. Общие недостатки МПТ Сложность конструкции, Невозможность работы в агрессивных средах, Необходимость частых ревизий, Меньший срок службы,
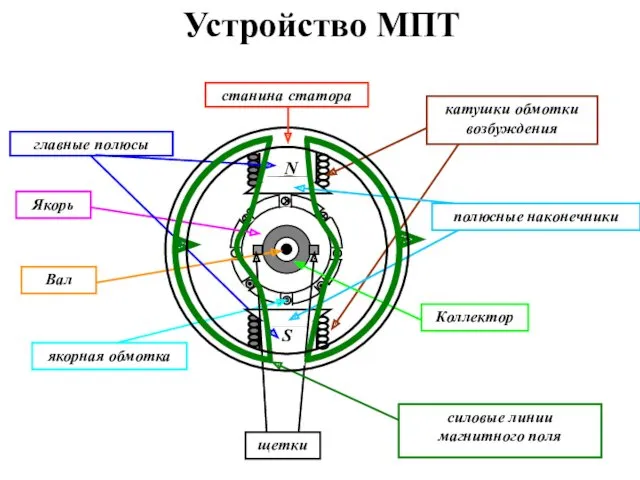
- 15. Устройство МПТ
- 16. Состав машин постоянного тока ИНДУКТОР: корпус – станина, главные и вспомогательные полюса с полюсными наконечниками, обмотка
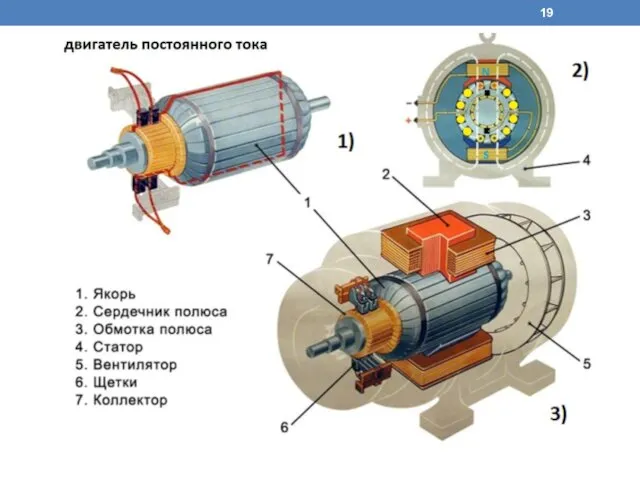
- 17. МАШИНЫ ПОСТОЯННОГО ТОКА Устройство, принцип действия и области применения машин постоянного тока Имеет неподвижную часть -
- 18. Сердечник якоря - из пластин электротехнической стали – напрессо-вывают на вал. В сердечнике якоря выштампованы пазы,
- 24. Работа электрической машины постоянного тока в режиме генератора С появлением тока в проводниках обмотки возникнут электромагнитные
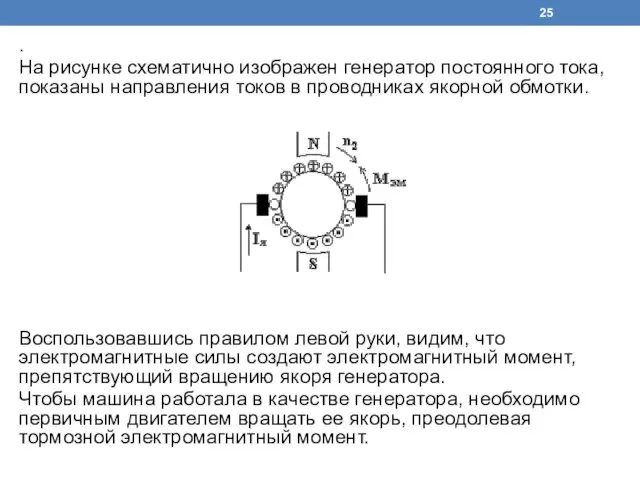
- 25. . На рисунке схематично изображен генератор постоянного тока, показаны направления токов в проводниках якорной обмотки. Воспользовавшись
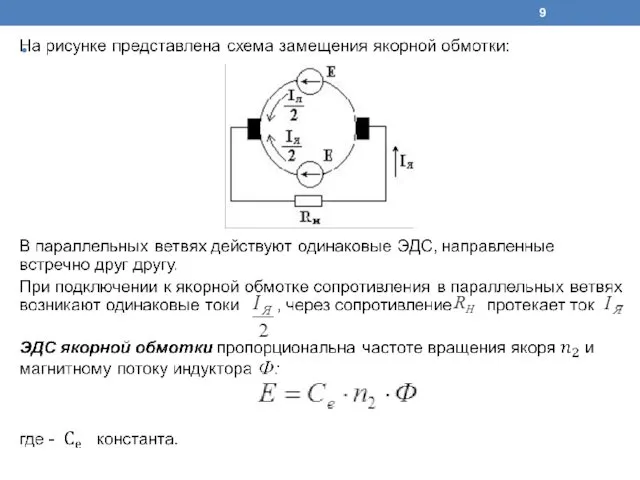
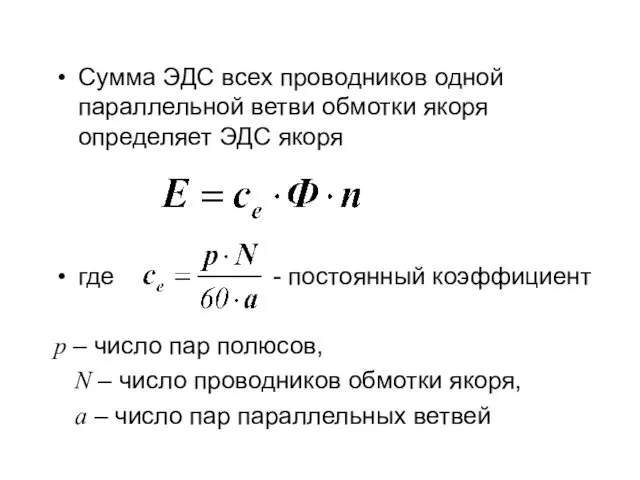
- 26. Сумма ЭДС всех проводников одной параллельной ветви обмотки якоря определяет ЭДС якоря где - постоянный коэффициент
- 27. Электромагнитная мощность генератора Мощность электрической энергии, снимаемой с его зажимов
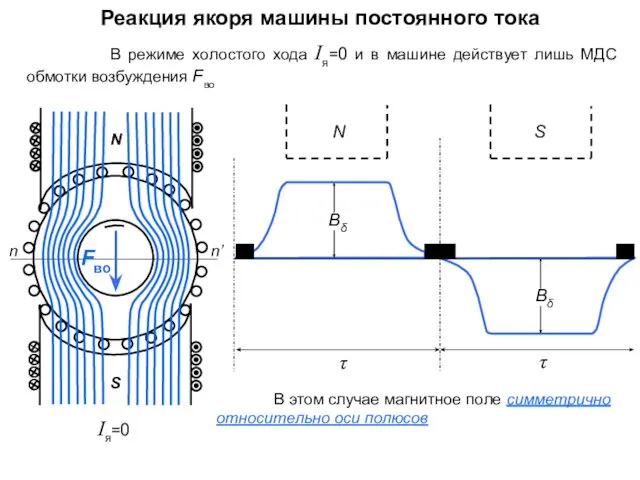
- 28. Реакция якоря машины постоянного тока В режиме холостого хода Iя=0 и в машине действует лишь МДС
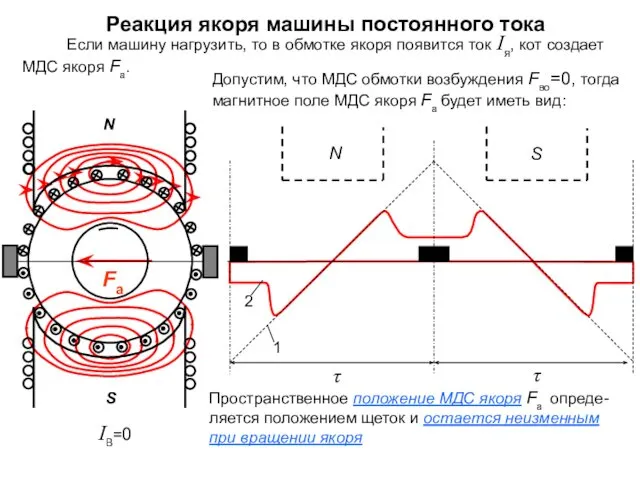
- 29. Реакция якоря машины постоянного тока Если машину нагрузить, то в обмотке якоря появится ток Iя, кот
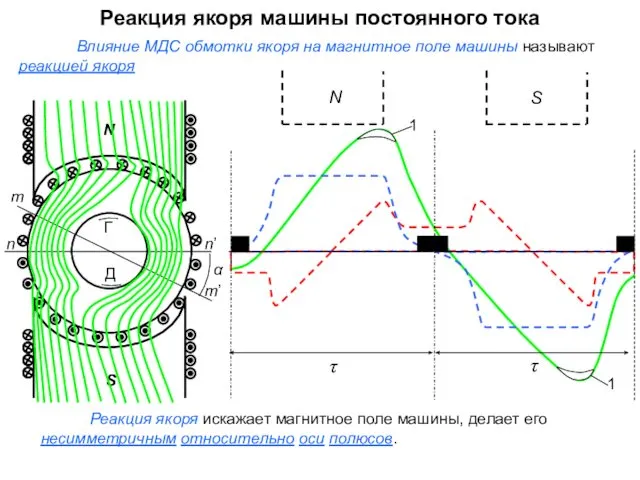
- 30. Реакция якоря машины постоянного тока Влияние МДС обмотки якоря на магнитное поле машины называют реакцией якоря
- 31. Устранение вредного влияния реакции якоря -компенсационная обмотка
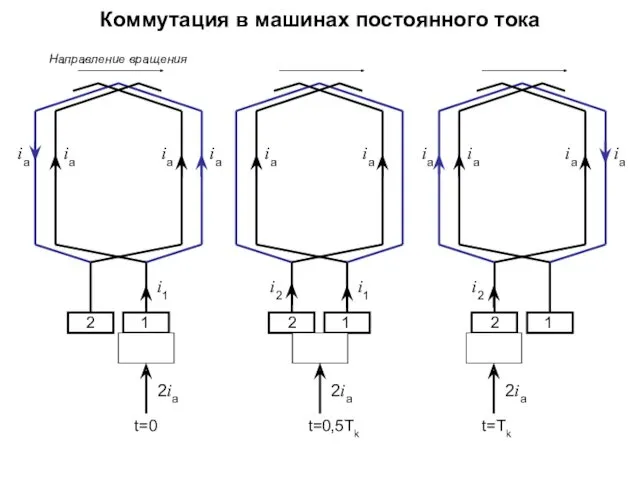
- 32. Коммутация в машинах постоянного тока
- 33. Tk=(60/Kn)(bщ/bk) – период коммутации K – число коллекторных пластин; n – частота вращения якоря, об/мин; bщ
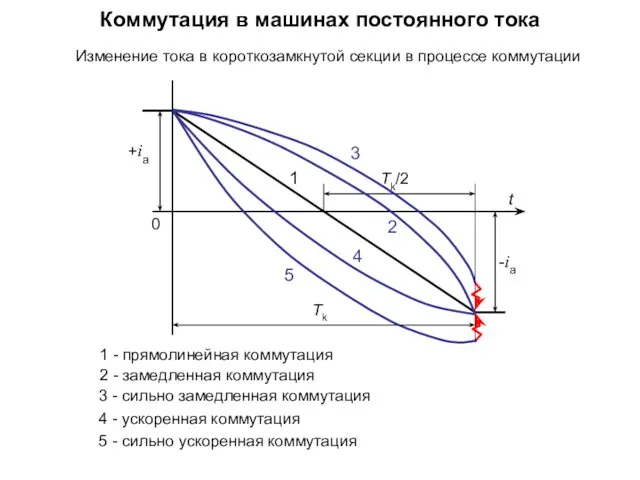
- 34. Коммутация в машинах постоянного тока Изменение тока в короткозамкнутой секции в процессе коммутации
- 35. Причины, вызывающие искрение на коллекторе Механические – слабое давление щеток на коллектор, биение коллектора, его эллиптичность
- 36. Способы улучшения коммутации 1. Добавочные полюса (ДП). Предназначены для создания магнитного поля, компенсирующее реактив- ную ЭДС.
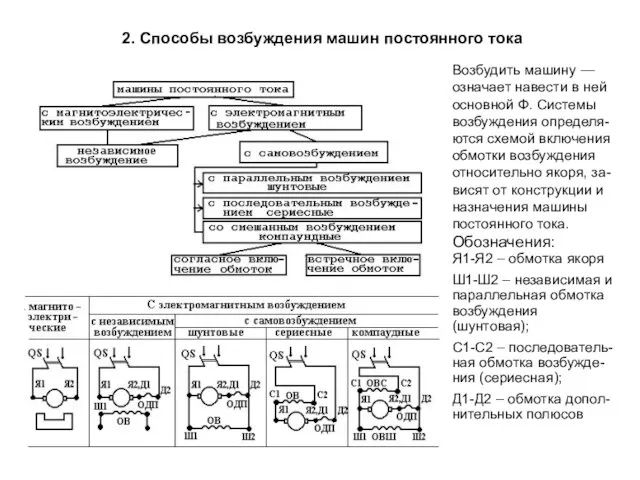
- 37. 2. Способы возбуждения машин постоянного тока Возбудить машину — означает навести в ней основной Ф. Системы
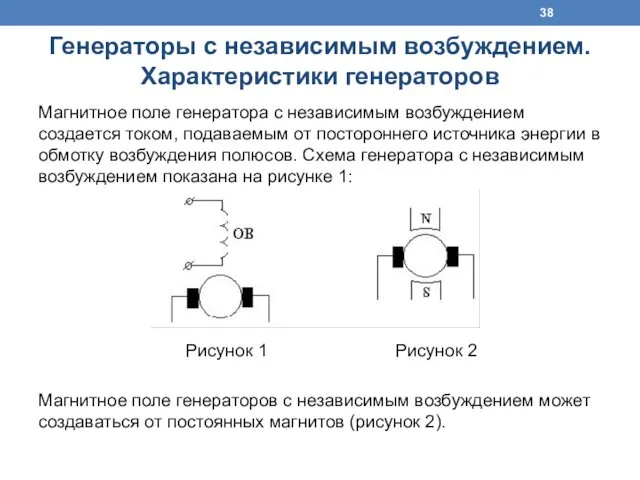
- 38. Генераторы с независимым возбуждением. Характеристики генераторов Магнитное поле генератора с независимым возбуждением создается током, подаваемым от
- 39. При независимом возбуждении основной магнитный поток создается постоянными магнитами или обмоткой возбуждения, питаемой от независимого источника.
- 40. Работа ГПТ независимого возбуждения Обмотка возбуждения ОВ подключается к источнику постоянного тока, а к выводам обмотки
- 41. Свойства и характеристики генератора независимого возбуждения Свойства ГПТ определяются их основными характеристиками: холостого хода, внешней и
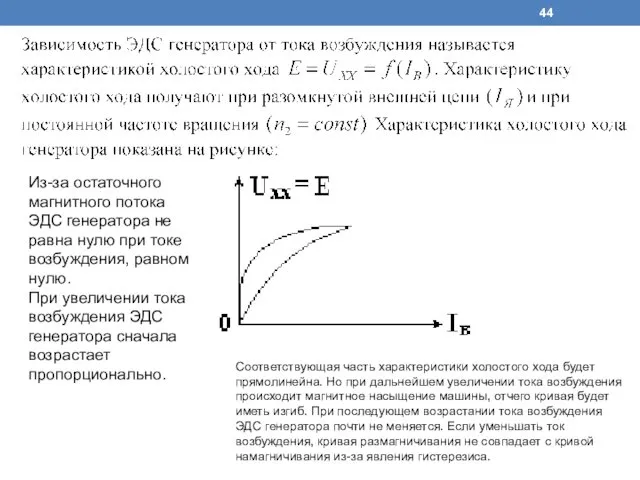
- 42. Характеристика холостого хода
- 43. Внешняя характеристика Внешняя характеристика U = f(I) - зависимость напряжения U на выводах генератора от тока
- 44. Из-за остаточного магнитного потока ЭДС генератора не равна нулю при токе возбуждения, равном нулю. При увеличении
- 46. Генераторы с самовозбуждением. Принцип самовозбуждения генератора с параллельным возбуждением Недостатком генератора с независимым возбуждением является необходимость
- 47. На рисунке изображен генератор с параллельным возбуждением: Обмотка возбуждения подключена параллельно якорной обмотке. В цепь возбуждения
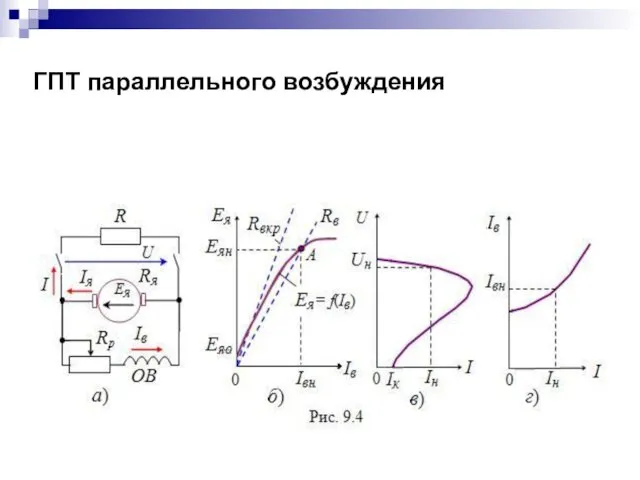
- 49. ГПТ параллельного возбуждения
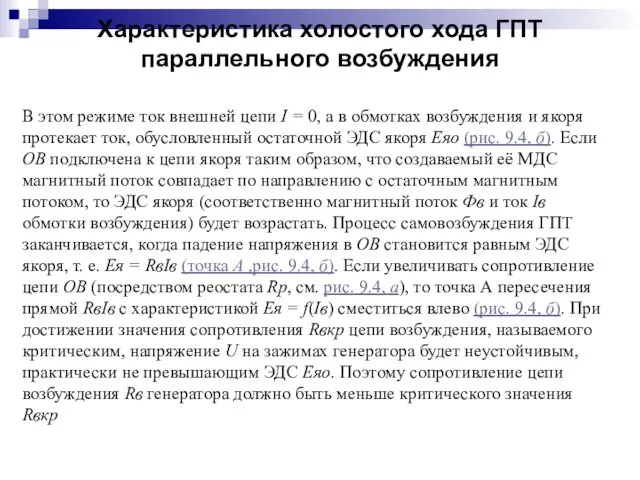
- 50. В этом режиме ток внешней цепи I = 0, а в обмотках возбуждения и якоря протекает
- 51. У генераторов параллельного возбуждения при уменьшении сопротивления R нагрузки ток I увеличивается до определённого предела, называемого
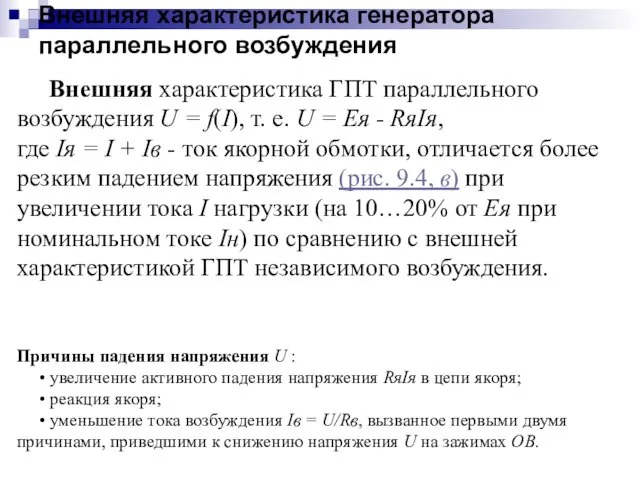
- 52. Внешняя характеристика генератора параллельного возбуждения Внешняя характеристика ГПТ параллельного возбуждения U = f(I), т. е. U
- 53. Регулировочная характеристика ГПТ параллельного возбуждения Регулировочная характеристика Iв = f(I) при n = const и U
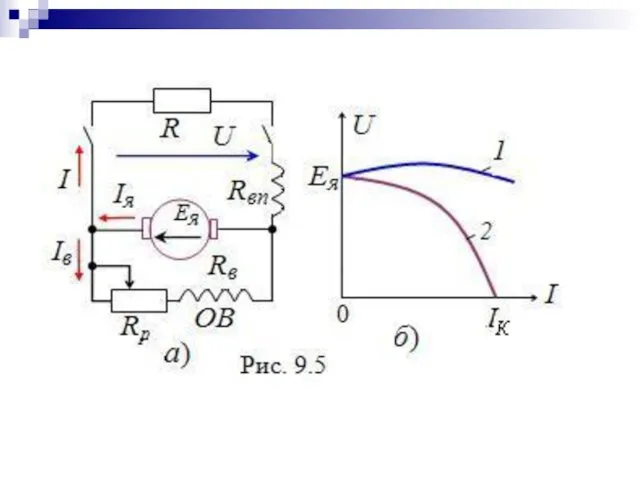
- 54. Генераторы смешанного возбуждения У генератора смешанного возбуждения (рис. 9.5, а) при согласном включении последовательной и параллельной
- 56. При встречном включении обмоток возбуждения при увеличении тока нагрузки напряжение на выходе генератора резко падает (кривая
- 57. ГПТ последовательного возбуждения не нашли широкого применения из-за непостоянства выходного напряжения.
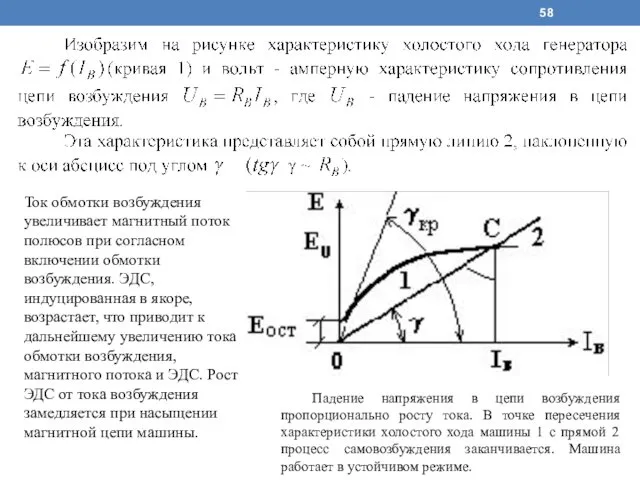
- 58. Ток обмотки возбуждения увеличивает магнитный поток полюсов при согласном включении обмотки возбуждения. ЭДС, индуцированная в якоре,
- 59. Генератор ПТ Первичный двигатель развивает вращающий момент М1, вращая ротор генератора с частотой n. Мощность механической
- 60. Если к обмотке возбуждения подведено напряжение UВ, то в ней возникает ток IВ, создающий МДС wВIB.
- 61. Двигатель ПТ Если через щетки и коллектор на обмотку якоря возбужденной машины подать напряжение U, то
- 62. Мощность, подводимой к двигателю электрической энергии Мощность механической энергии, снимаемой с вала двигателя
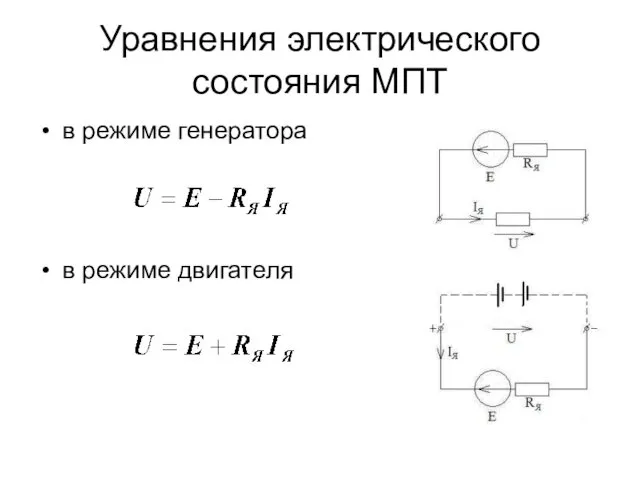
- 63. Уравнения электрического состояния МПТ в режиме генератора в режиме двигателя
- 64. Уравнение электрического состояния цепи якоря генератора Уравнение баланса мощностей цепи якоря генератора Е⋅ Iя = U⋅
- 65. Напряжение приложенное к зажимам якоря двигателя Ток якоря двигателя
- 66. Уравнение баланса мощностей цепи якоря двигателя U⋅ Iя = E⋅ Iя + Iя2⋅Rя Рэм = Рмех
- 67. 3. Принцип работы двигателей постоянного тока Основа работы ДПТ - закон Ампера. Для создания вращающего момента
- 69. Вращающий электромагнитный момент двигателей постоянного тока В результате взаимодействия тока якоря Iя с магнитным потоком Фв
- 70. ПротивоЭДС Если вращающий момент М больше момента сопротивления Mс механизма на валу, т. е. M >
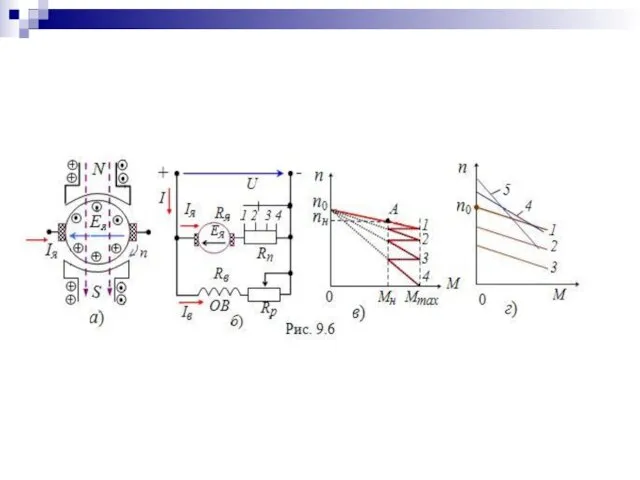
- 71. Классификация двигателей по способу возбуждения Двигатели постоянного тока классифицируют по способу возбуждения: независимое, параллельное (шунтовое), последовательное
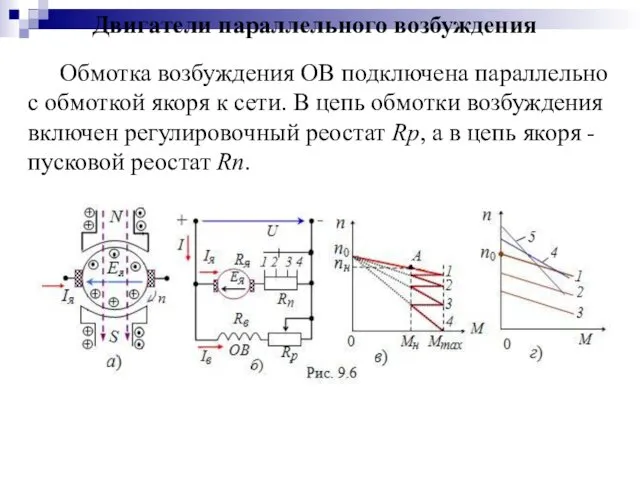
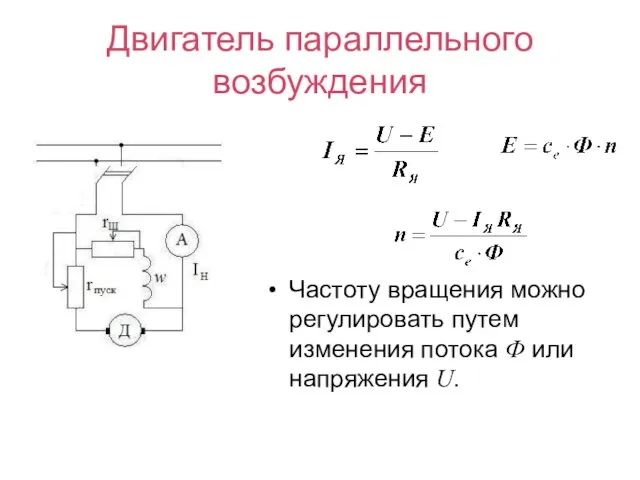
- 72. Двигатели параллельного возбуждения Обмотка возбуждения ОВ подключена параллельно с обмоткой якоря к сети. В цепь обмотки
- 73. Двигатель параллельного возбуждения Частоту вращения можно регулировать путем изменения потока Ф или напряжения U.
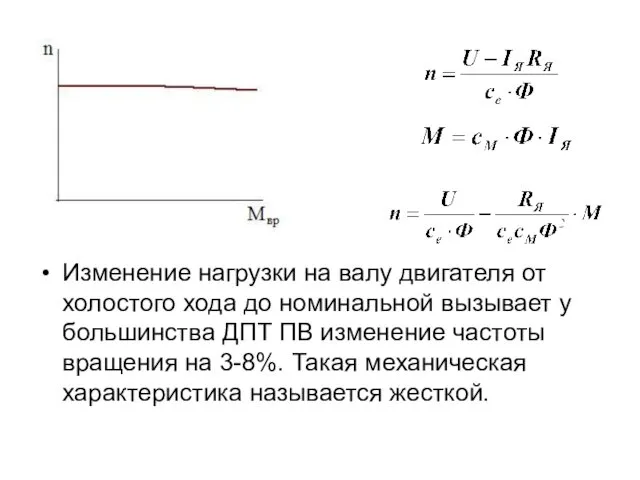
- 74. Изменение нагрузки на валу двигателя от холостого хода до номинальной вызывает у большинства ДПТ ПВ изменение
- 75. При регулировании Ф изменением IB (реостатом rш) уменьшение Ф понижает ЭДС и вращающий момент М. Согласно
- 76. Iв = U/(Rв + Rp), В ДПТ параллельного возбуждения ток возбуждения не зависит от тока якоря
- 77. Чтобы ограничить недопустимо большой пусковой ток в обмотке якоря и, как следствие, возникающий рывок или удар
- 78. Скоростная характеристика двигателя параллельного возбуждения Электромеханические свойства ДПТ определяются его скоростной n(Iя) или механической n(M) характеристиками.
- 79. Механические характеристика двигателя параллельного возбуждения Механическая характеристика n(M) представляет зависимость частоты вращения якоря n от развиваемого
- 80. Пуск двигателя параллельного возбуждения Прямой пуск двигателя (Rп = 0) применяют только для двигателей малой мощности
- 81. Пуск двигателя с использованием пускового реостата называют реостатным. Перед пуском для получения максимального пускового момента при
- 82. По мере разгона сопротивление пускового реостата Rп ступенчато уменьшают; разгон двигателя осуществляется по отдельным отрезкам реостатных
- 83. При пуске двигателей большой мощности использование пускового реостата (громоздкость и значительные потерь энергии) становится неэффективным. В
- 84. Регулировочный реостат Rр позволяет изменять ток возбуждения Iв двигателя и его магнитный поток Фв. При этом
- 85. Регулирования частоты вращения и реверсирование двигателя параллельного возбуждения Частоту вращения якоря n = U/(CEФв) – ((Rя
- 86. Реверсирование двигателей можно обеспечить изменением направления тока или в обмотке якоря, или в обмотке возбуждения.
- 87. Рабочие характеристики двигателя параллельного возбуждения Рабочие характеристики двигателя представляют собой зависимости потребляемой мощности P1, тока Iя,
- 88. Характеристики n = f(P2) и M = f(P2) являются практически линейными, а зависимости P1 = f(P2),
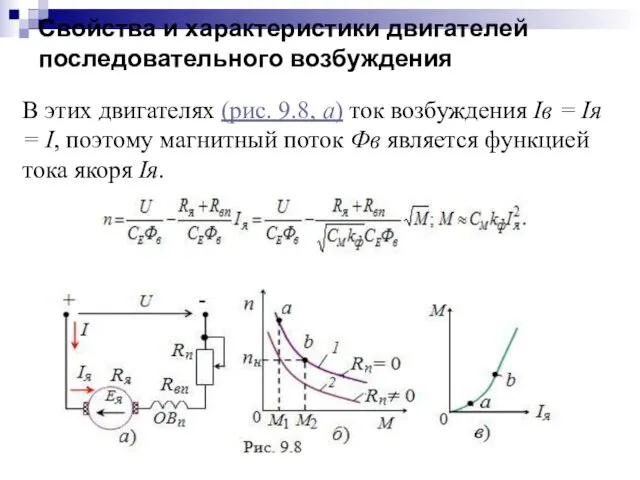
- 89. Свойства и характеристики двигателей последовательного возбуждения В этих двигателях (рис. 9.8, a) ток возбуждения Iв =
- 90. При увеличении нагрузки двигателя возрастают падение напряжения в сопротивлении якоря и магнитный поток. Снижается скорость. Механическая
- 91. При небольших нагрузках (М При пуске с реостатом Rп, ограничивающим пусковой ток и момент до допустимых
- 92. Несмотря на указанные недостатки, ДПТ последовательного возбуждения широко применяются в различных электрических приводах, особенно там, где
- 93. Иногда желательна промежуточная форма механической характеристики между мягкой и жесткой. Такой характеристикой обладает двигатель смешанного возбуждения.
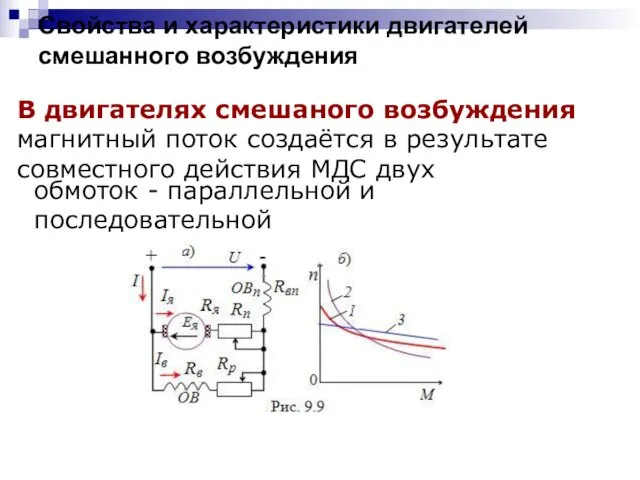
- 94. Свойства и характеристики двигателей смешанного возбуждения В двигателях смешаного возбуждения магнитный поток создаётся в результате совместного
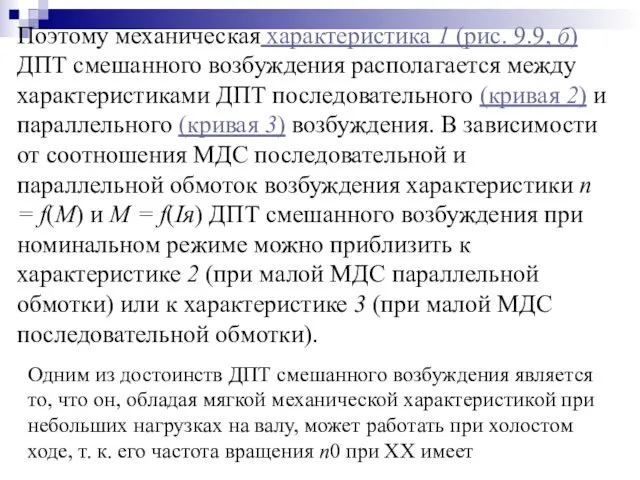
- 95. Поэтому механическая характеристика 1 (рис. 9.9, б) ДПТ смешанного возбуждения располагается между характеристиками ДПТ последовательного (кривая
- 96. 11. Пуск двигателей постоянного тока Из уравнения равновесия ЭДС двигателя (2.52) ток якоря равен: (2.81) В
- 97. Схема пуска двигателя с помощью пусковых реостатов приведена на рис. 2.56, а. (б – скоростные характеристики)
- 98. Поэтому в двигателях большой мощности применяют пуск при пониженном напряжении. Для этого необходим регулятор напряжения: регулируемые
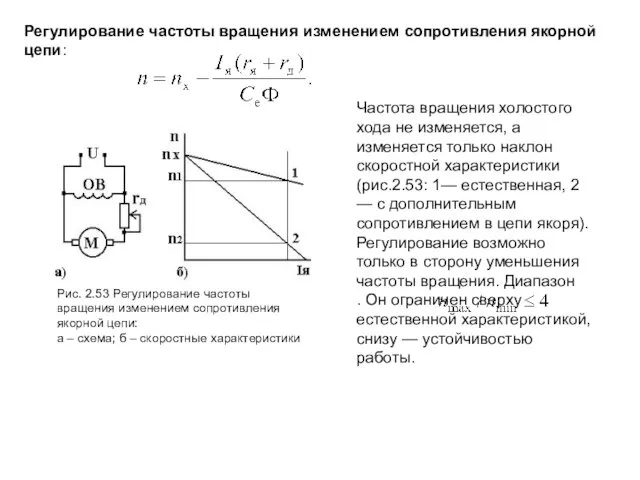
- 99. 12. Регулирование частоты вращения двигателей постоянного тока Для двигателя параллельного возбуждения частота вращения: Частоту вращения можно
- 100. Регулирование частоты вращения изменением сопротивления якорной цепи: Частота вращения холостого хода не изменяется, а изменяется только
- 101. Регулирование частоты вращения изменением магнитного потока. Рис. 2.54 Регулирование частоты вращения изменением магнитного потока: а —
- 102. 25. Торможение двигателей постоянного тока Для того остановить рабочую машину, наряду с механическими, применяют электрические способы
- 103. При переключателе П в положении 2 машина работает двигателем с часто-той вращения якоря и током якоря
- 104. Торможение противовключением. Схема включения приведена на рис. 2.60,а Рис. 2.60 Торможение противовключением: а — схема, б
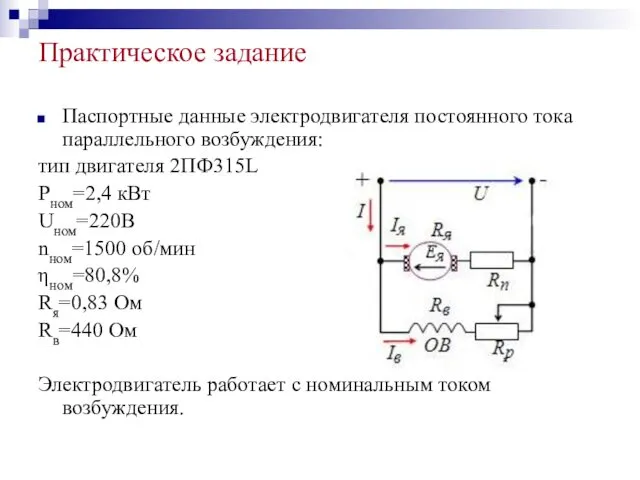
- 105. Практическое задание Паспортные данные электродвигателя постоянного тока параллельного возбуждения: тип двигателя 2ПФ315L Рном=2,4 кВт Uном=220В nном=1500
- 106. 1. Рассчитать и построить естественную механическую характеристику двигателя. Определить частоту вращения его при моменте на валу,
- 107. 1. Расчет и построение естественной механической характеристики Номинальная мощность, потребляемая из сети Р1ном=Рном/ƞном=2400/0,808=2970 Вт Номинальный момент
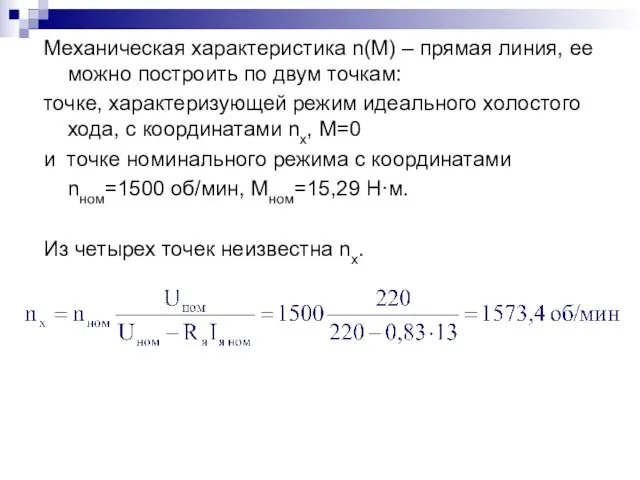
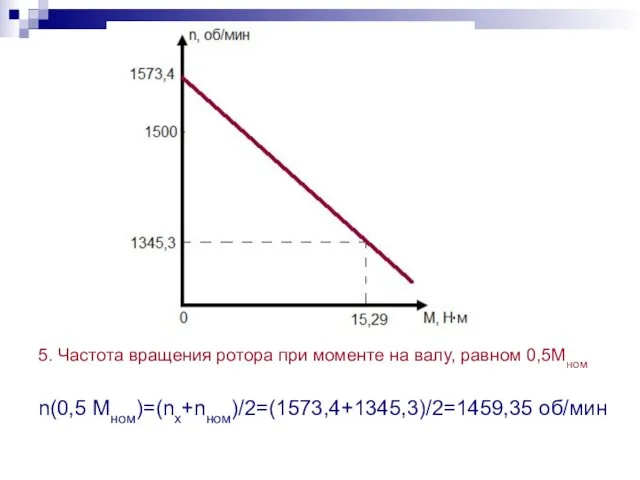
- 108. Механическая характеристика n(M) – прямая линия, ее можно построить по двум точкам: точке, характеризующей режим идеального
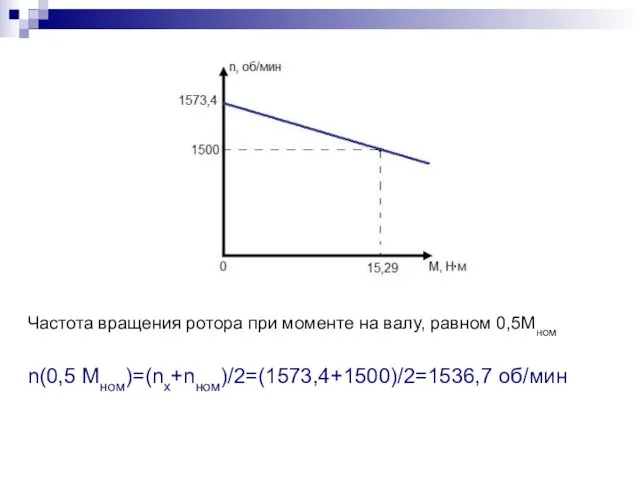
- 109. Частота вращения ротора при моменте на валу, равном 0,5Мном n(0,5 Мном)=(nх+nном)/2=(1573,4+1500)/2=1536,7 об/мин
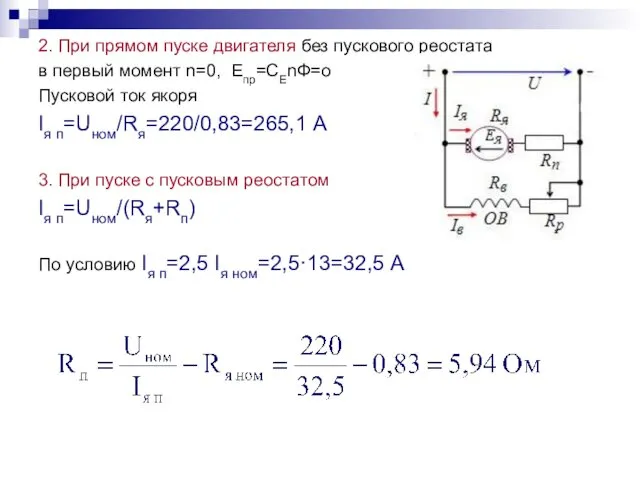
- 110. 2. При прямом пуске двигателя без пускового реостата в первый момент n=0, Епр=СЕnФ=о Пусковой ток якоря
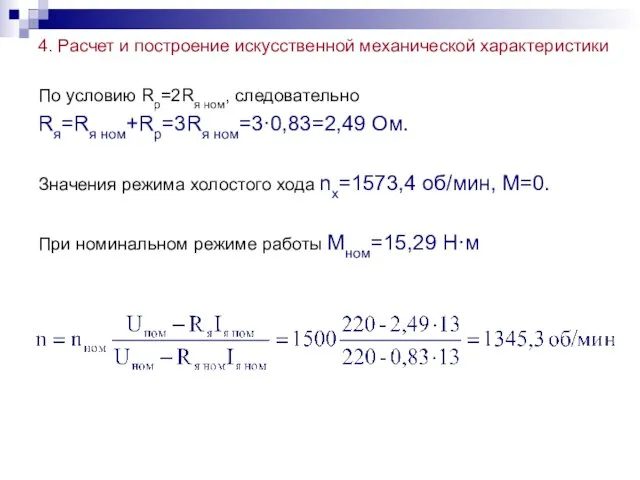
- 111. 4. Расчет и построение искусственной механической характеристики По условию Rр=2Rя ном, следовательно Rя=Rя ном+Rр=3Rя ном=3·0,83=2,49 Ом.
- 112. 5. Частота вращения ротора при моменте на валу, равном 0,5Мном n(0,5 Мном)=(nх+nном)/2=(1573,4+1345,3)/2=1459,35 об/мин
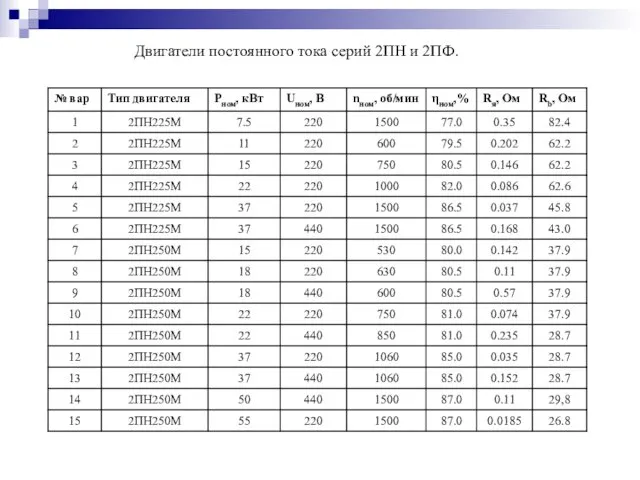
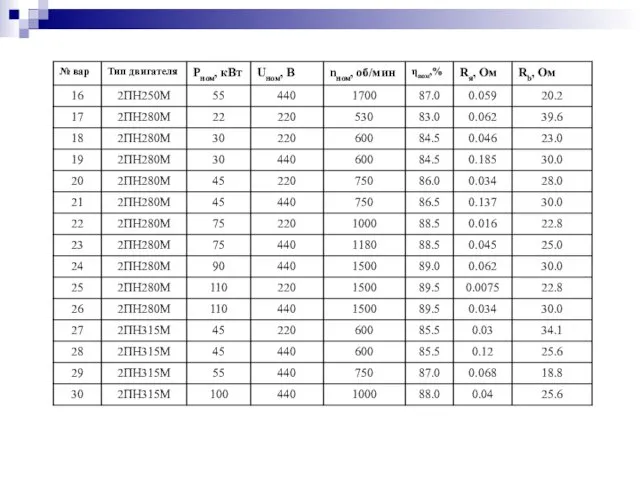
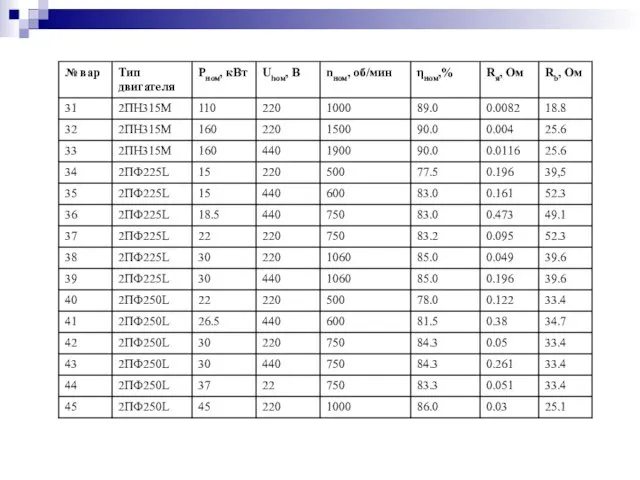
- 113. Задачи для самостоятельного решения 1. Рассчитать и построить естественную механическую характеристику двигателя. Определить частоту вращения его
- 114. Двигатели постоянного тока серий 2ПН и 2ПФ.
- 118. Скачать презентацию
Назначение и области применения МПТ
Электрические машины постоянного тока
Как звенья САР;
Назначение и области применения МПТ
Электрические машины постоянного тока
Как звенья САР;
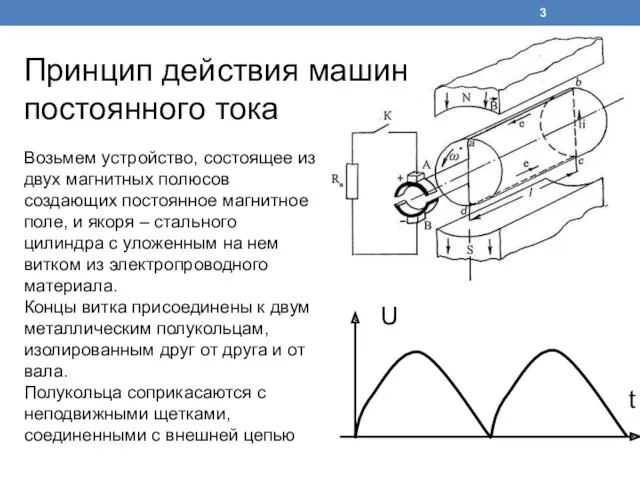
Возьмем устройство, состоящее из двух магнитных полюсов создающих постоянное магнитное поле,
Возьмем устройство, состоящее из двух магнитных полюсов создающих постоянное магнитное поле,
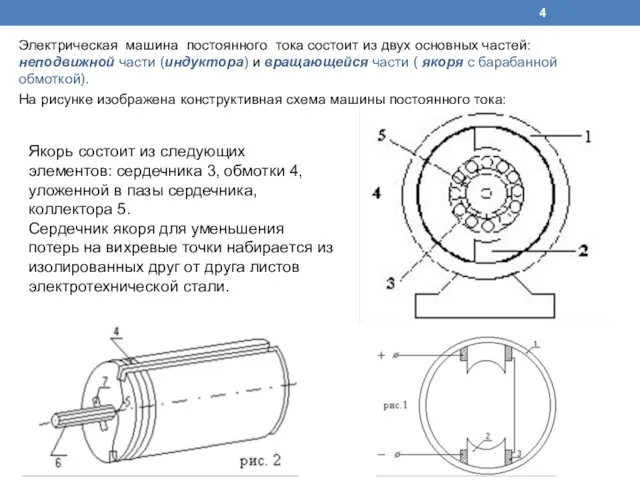
Электрическая машина постоянного тока состоит из двух основных частей: неподвижной части
Электрическая машина постоянного тока состоит из двух основных частей: неподвижной части
Принцип действия МПТ
N
S
Принцип действия МПТ
N
S

Принцип действия машины постоянного тока
Рассмотрим работу машины постоянного тока на представленной
Принцип действия машины постоянного тока
Рассмотрим работу машины постоянного тока на представленной
.
На рисунке крестиком обозначены ЭДС, направленные от нас, точками - ЭДС,
.
На рисунке крестиком обозначены ЭДС, направленные от нас, точками - ЭДС,

Два проводника, соединенные последовательно, образуют один виток или одну катушку.
ЭДС
Два проводника, соединенные последовательно, образуют один виток или одну катушку.
ЭДС
В реальных электрических машинах постоянного тока используется специальное контактное устройство -
В реальных электрических машинах постоянного тока используется специальное контактное устройство -
Принцип действия электрических машин
постоянного тока (МПТ) основывается на взаимодействии постоянного
Принцип действия электрических машин
постоянного тока (МПТ) основывается на взаимодействии постоянного
Двигатели: Через коллектор и щетки
в рамку подается постоянный ток, который
Двигатели: Через коллектор и щетки
в рамку подается постоянный ток, который
Преимущества МПТ
ГПТ
Жесткая внешняя характеристика,
Хорошие регулировочные свойства,
Возможность использования в
автоматических линиях
ДПТ
-Лучшие механические
Преимущества МПТ
ГПТ
Жесткая внешняя характеристика,
Хорошие регулировочные свойства,
Возможность использования в
автоматических линиях
ДПТ
-Лучшие механические
Общие недостатки МПТ
Сложность конструкции,
Невозможность работы в агрессивных средах,
Необходимость частых ревизий,
Меньший срок
Общие недостатки МПТ
Сложность конструкции,
Невозможность работы в агрессивных средах,
Необходимость частых ревизий,
Меньший срок
Устройство МПТ
Устройство МПТ
Состав машин постоянного тока
ИНДУКТОР: корпус – станина, главные и вспомогательные полюса
Состав машин постоянного тока
ИНДУКТОР: корпус – станина, главные и вспомогательные полюса

МАШИНЫ ПОСТОЯННОГО ТОКА
Устройство, принцип действия и области применения машин постоянного тока
Имеет
МАШИНЫ ПОСТОЯННОГО ТОКА
Устройство, принцип действия и области применения машин постоянного тока
Имеет
Сердечник якоря - из пластин электротехнической стали – напрессо-вывают на вал.
Сердечник якоря - из пластин электротехнической стали – напрессо-вывают на вал.


Работа электрической машины постоянного тока в режиме генератора
С появлением тока
Работа электрической машины постоянного тока в режиме генератора
С появлением тока
.
На рисунке схематично изображен генератор постоянного тока, показаны направления токов
.
На рисунке схематично изображен генератор постоянного тока, показаны направления токов
Сумма ЭДС всех проводников одной параллельной ветви обмотки якоря определяет ЭДС
Сумма ЭДС всех проводников одной параллельной ветви обмотки якоря определяет ЭДС
Электромагнитная мощность генератора
Мощность электрической энергии, снимаемой с его зажимов
Электромагнитная мощность генератора
Мощность электрической энергии, снимаемой с его зажимов
Реакция якоря машины постоянного тока
В режиме холостого хода Iя=0 и
Реакция якоря машины постоянного тока
В режиме холостого хода Iя=0 и
Реакция якоря машины постоянного тока
Если машину нагрузить, то в обмотке
Реакция якоря машины постоянного тока
Если машину нагрузить, то в обмотке
Реакция якоря машины постоянного тока
Влияние МДС обмотки якоря на магнитное
Реакция якоря машины постоянного тока
Влияние МДС обмотки якоря на магнитное
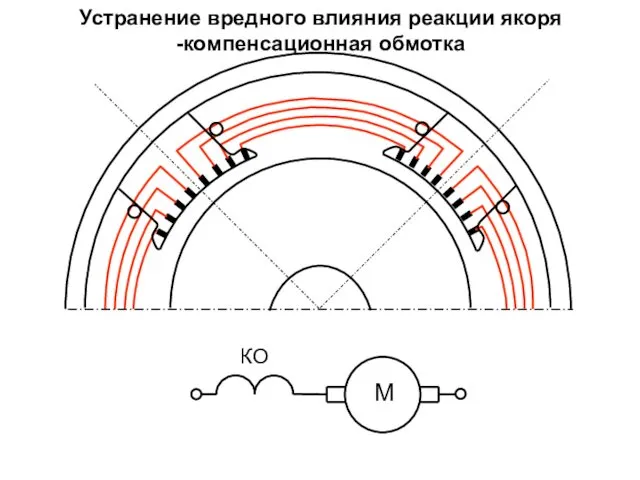
Устранение вредного влияния реакции якоря
-компенсационная обмотка
Устранение вредного влияния реакции якоря
-компенсационная обмотка
Коммутация в машинах постоянного тока
Коммутация в машинах постоянного тока
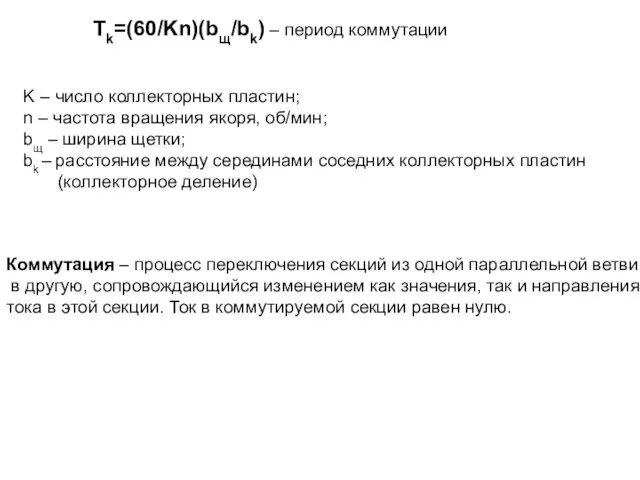
Tk=(60/Kn)(bщ/bk) – период коммутации
K – число коллекторных пластин;
n – частота вращения
Tk=(60/Kn)(bщ/bk) – период коммутации
K – число коллекторных пластин;
n – частота вращения
Коммутация в машинах постоянного тока
Изменение тока в короткозамкнутой секции в процессе
Коммутация в машинах постоянного тока
Изменение тока в короткозамкнутой секции в процессе
Причины, вызывающие искрение на коллекторе
Механические – слабое давление щеток на коллектор,
Причины, вызывающие искрение на коллекторе
Механические – слабое давление щеток на коллектор,
Способы улучшения коммутации
1. Добавочные полюса (ДП).
Предназначены для создания магнитного поля, компенсирующее
Способы улучшения коммутации
1. Добавочные полюса (ДП).
Предназначены для создания магнитного поля, компенсирующее
2. Способы возбуждения машин постоянного тока
Возбудить машину — означает навести
2. Способы возбуждения машин постоянного тока
Возбудить машину — означает навести
Генераторы с независимым возбуждением. Характеристики генераторов
Магнитное поле генератора с независимым
Генераторы с независимым возбуждением. Характеристики генераторов
Магнитное поле генератора с независимым
При независимом возбуждении основной магнитный поток создается постоянными магнитами или обмоткой
При независимом возбуждении основной магнитный поток создается постоянными магнитами или обмоткой
Работа ГПТ независимого возбуждения
Обмотка возбуждения ОВ подключается к источнику постоянного
Работа ГПТ независимого возбуждения
Обмотка возбуждения ОВ подключается к источнику постоянного
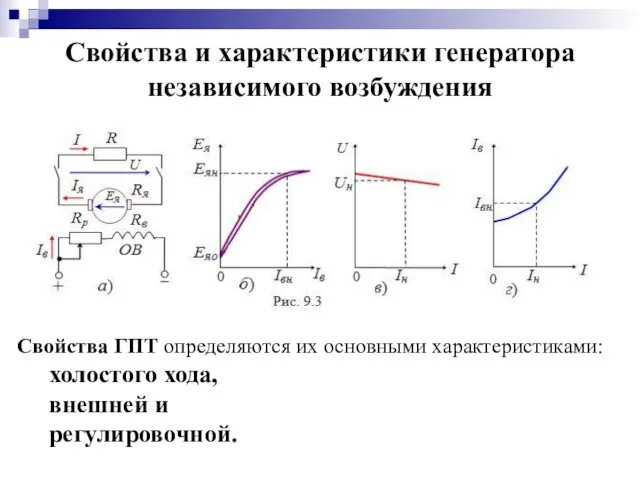
Свойства и характеристики генератора независимого возбуждения
Свойства ГПТ определяются их основными характеристиками:
Свойства и характеристики генератора независимого возбуждения
Свойства ГПТ определяются их основными характеристиками:
Характеристика холостого хода
Характеристика холостого хода
Внешняя характеристика
Внешняя характеристика U = f(I) - зависимость напряжения U
Внешняя характеристика
Внешняя характеристика U = f(I) - зависимость напряжения U
Из-за остаточного магнитного потока ЭДС генератора не равна нулю при токе
Из-за остаточного магнитного потока ЭДС генератора не равна нулю при токе
Генераторы с самовозбуждением.
Принцип самовозбуждения генератора с параллельным возбуждением
Недостатком генератора
Генераторы с самовозбуждением.
Принцип самовозбуждения генератора с параллельным возбуждением
Недостатком генератора
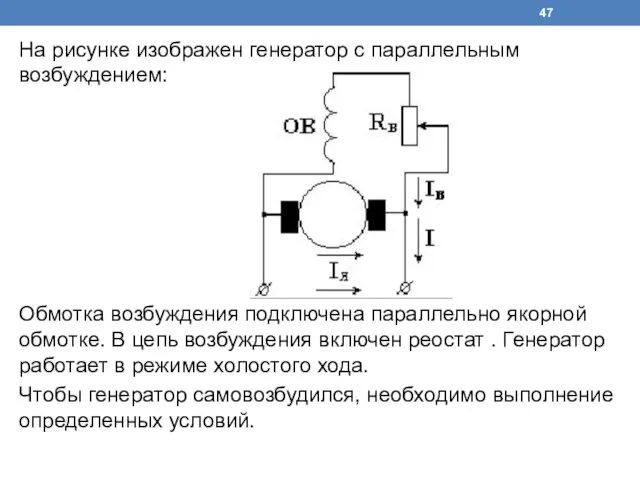
На рисунке изображен генератор с параллельным возбуждением:
Обмотка возбуждения подключена параллельно якорной
На рисунке изображен генератор с параллельным возбуждением:
Обмотка возбуждения подключена параллельно якорной
ГПТ параллельного возбуждения
ГПТ параллельного возбуждения
В этом режиме ток внешней цепи I = 0, а в
В этом режиме ток внешней цепи I = 0, а в
У генераторов параллельного возбуждения при уменьшении сопротивления R нагрузки ток I
У генераторов параллельного возбуждения при уменьшении сопротивления R нагрузки ток I
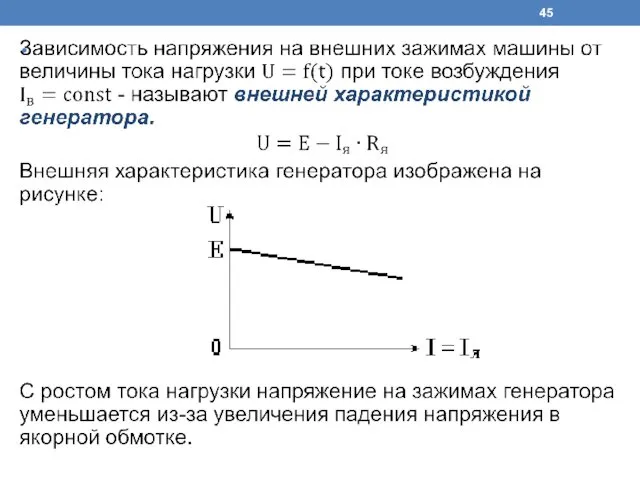
Внешняя характеристика генератора параллельного возбуждения
Внешняя характеристика ГПТ параллельного возбуждения U
Внешняя характеристика генератора параллельного возбуждения
Внешняя характеристика ГПТ параллельного возбуждения U
Регулировочная характеристика ГПТ параллельного возбуждения
Регулировочная характеристика Iв = f(I)
Регулировочная характеристика ГПТ параллельного возбуждения
Регулировочная характеристика Iв = f(I)
Генераторы смешанного возбуждения
У генератора смешанного возбуждения (рис. 9.5, а) при
Генераторы смешанного возбуждения
У генератора смешанного возбуждения (рис. 9.5, а) при
При встречном включении обмоток возбуждения при увеличении тока нагрузки напряжение на
ГПТ последовательного возбуждения
не нашли широкого применения из-за непостоянства выходного напряжения.
ГПТ последовательного возбуждения
не нашли широкого применения из-за непостоянства выходного напряжения.
Ток обмотки возбуждения увеличивает магнитный поток полюсов при согласном включении обмотки
Ток обмотки возбуждения увеличивает магнитный поток полюсов при согласном включении обмотки
Генератор ПТ
Первичный двигатель развивает вращающий момент М1, вращая ротор генератора с
Генератор ПТ
Первичный двигатель развивает вращающий момент М1, вращая ротор генератора с
Если к обмотке возбуждения подведено напряжение UВ, то в ней возникает
Если к обмотке возбуждения подведено напряжение UВ, то в ней возникает
Двигатель ПТ
Если через щетки и коллектор на обмотку якоря возбужденной машины
Двигатель ПТ
Если через щетки и коллектор на обмотку якоря возбужденной машины
Мощность, подводимой к двигателю электрической энергии
Мощность механической энергии, снимаемой с
Мощность, подводимой к двигателю электрической энергии
Мощность механической энергии, снимаемой с
Уравнения электрического состояния МПТ
в режиме генератора
в режиме двигателя
Уравнения электрического состояния МПТ
в режиме генератора
в режиме двигателя
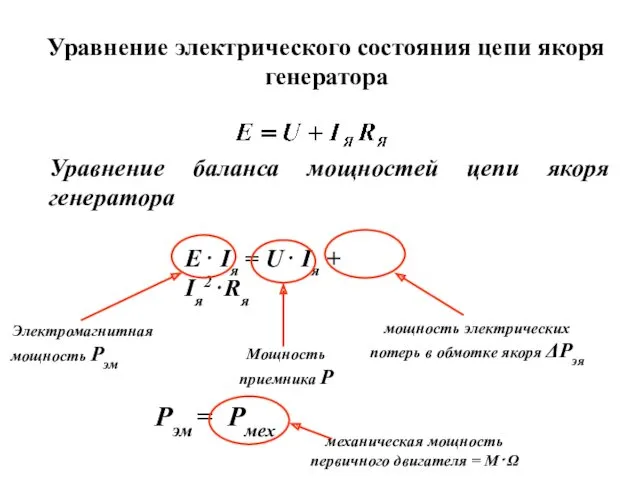
Уравнение электрического состояния цепи якоря генератора
Уравнение баланса мощностей цепи якоря
Уравнение электрического состояния цепи якоря генератора
Уравнение баланса мощностей цепи якоря
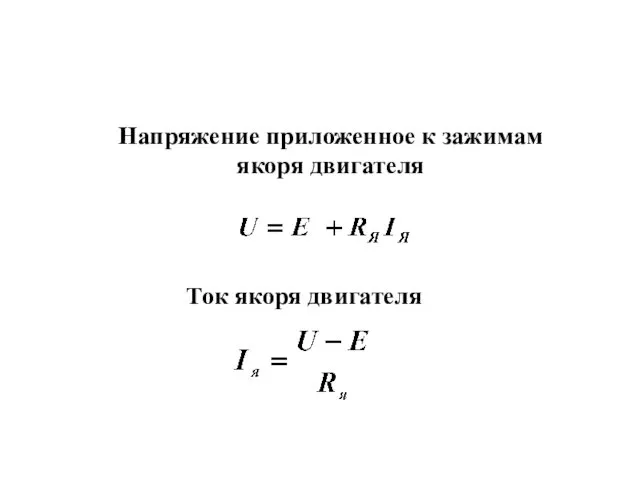
Напряжение приложенное к зажимам
якоря двигателя
Ток якоря двигателя
Напряжение приложенное к зажимам
якоря двигателя
Ток якоря двигателя

Уравнение баланса мощностей цепи якоря двигателя
U⋅ Iя = E⋅ Iя +
Уравнение баланса мощностей цепи якоря двигателя
U⋅ Iя = E⋅ Iя +
3. Принцип работы двигателей постоянного тока
Основа работы ДПТ - закон
3. Принцип работы двигателей постоянного тока
Основа работы ДПТ - закон
Вращающий электромагнитный момент двигателей постоянного тока
В результате взаимодействия тока якоря
Вращающий электромагнитный момент двигателей постоянного тока
В результате взаимодействия тока якоря
ПротивоЭДС
Если вращающий момент М больше момента сопротивления Mс механизма на
ПротивоЭДС
Если вращающий момент М больше момента сопротивления Mс механизма на
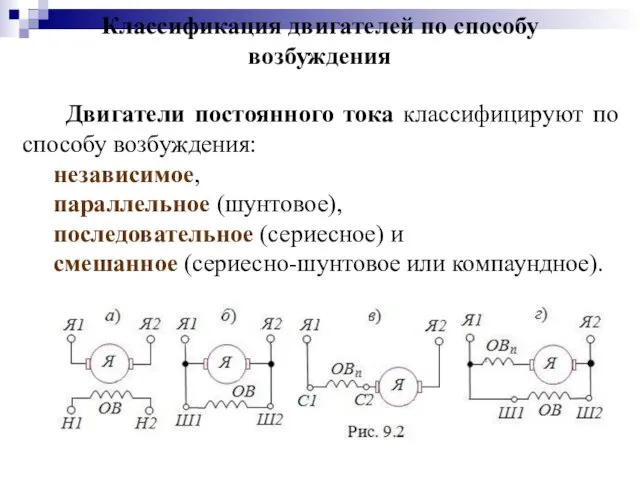
Классификация двигателей по способу возбуждения
Двигатели постоянного тока классифицируют по
Классификация двигателей по способу возбуждения
Двигатели постоянного тока классифицируют по
Двигатели параллельного возбуждения
Обмотка возбуждения ОВ подключена параллельно с обмоткой якоря
Двигатели параллельного возбуждения
Обмотка возбуждения ОВ подключена параллельно с обмоткой якоря
Двигатель параллельного возбуждения
Частоту вращения можно регулировать путем изменения потока Ф или
Двигатель параллельного возбуждения
Частоту вращения можно регулировать путем изменения потока Ф или
Изменение нагрузки на валу двигателя от холостого хода до номинальной вызывает
Изменение нагрузки на валу двигателя от холостого хода до номинальной вызывает
При регулировании Ф изменением IB (реостатом rш) уменьшение Ф понижает ЭДС
При регулировании Ф изменением IB (реостатом rш) уменьшение Ф понижает ЭДС
Iв = U/(Rв + Rp),
В ДПТ параллельного возбуждения ток
Iв = U/(Rв + Rp),
В ДПТ параллельного возбуждения ток
Чтобы ограничить недопустимо большой пусковой ток в обмотке якоря и, как
Чтобы ограничить недопустимо большой пусковой ток в обмотке якоря и, как
Скоростная характеристика двигателя параллельного возбуждения
Электромеханические свойства ДПТ определяются его скоростной
Скоростная характеристика двигателя параллельного возбуждения
Электромеханические свойства ДПТ определяются его скоростной
Механические характеристика двигателя параллельного возбуждения
Механическая характеристика n(M) представляет зависимость частоты вращения
Механические характеристика двигателя параллельного возбуждения
Механическая характеристика n(M) представляет зависимость частоты вращения
Пуск двигателя параллельного возбуждения
Прямой пуск двигателя (Rп = 0) применяют
Пуск двигателя параллельного возбуждения
Прямой пуск двигателя (Rп = 0) применяют
Пуск двигателя с использованием пускового реостата называют реостатным.
Перед пуском для
Пуск двигателя с использованием пускового реостата называют реостатным.
Перед пуском для
По мере разгона сопротивление пускового реостата Rп ступенчато уменьшают; разгон двигателя
По мере разгона сопротивление пускового реостата Rп ступенчато уменьшают; разгон двигателя
При пуске двигателей большой мощности использование пускового реостата (громоздкость и значительные
При пуске двигателей большой мощности использование пускового реостата (громоздкость и значительные
Регулировочный реостат Rр позволяет изменять ток возбуждения Iв двигателя и его
Регулировочный реостат Rр позволяет изменять ток возбуждения Iв двигателя и его
Регулирования частоты вращения и реверсирование двигателя параллельного возбуждения
Частоту вращения якоря
Регулирования частоты вращения и реверсирование двигателя параллельного возбуждения
Частоту вращения якоря
Реверсирование двигателей можно обеспечить изменением направления тока
или в обмотке якоря,
Реверсирование двигателей можно обеспечить изменением направления тока
или в обмотке якоря,
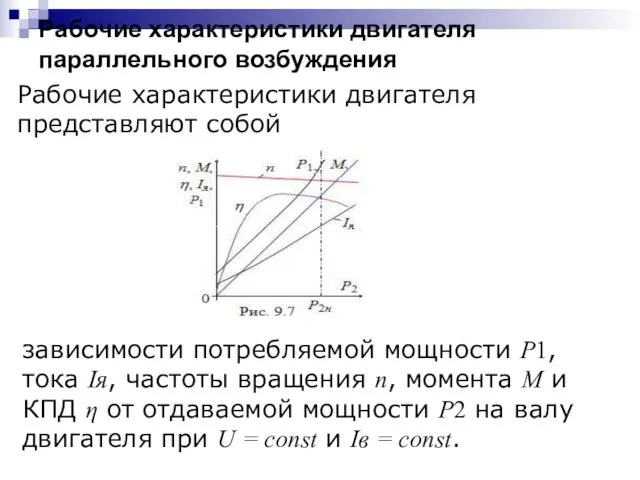
Рабочие характеристики двигателя параллельного возбуждения
Рабочие характеристики двигателя представляют собой
зависимости
Рабочие характеристики двигателя параллельного возбуждения
Рабочие характеристики двигателя представляют собой
зависимости
Характеристики n = f(P2) и M = f(P2) являются практически линейными,
Характеристики n = f(P2) и M = f(P2) являются практически линейными,
Свойства и характеристики двигателей последовательного возбуждения
В этих двигателях (рис. 9.8,
Свойства и характеристики двигателей последовательного возбуждения
В этих двигателях (рис. 9.8,
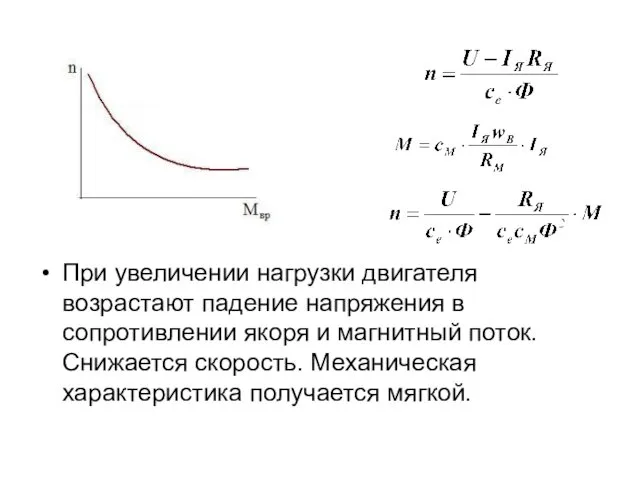
При увеличении нагрузки двигателя возрастают падение напряжения в сопротивлении якоря и
При увеличении нагрузки двигателя возрастают падение напряжения в сопротивлении якоря и
При небольших нагрузках (М < Мн /4) частота вращения резко возрастает,
При небольших нагрузках (М < Мн /4) частота вращения резко возрастает,
Несмотря на указанные недостатки, ДПТ последовательного возбуждения широко применяются в различных
Несмотря на указанные недостатки, ДПТ последовательного возбуждения широко применяются в различных
Иногда желательна промежуточная форма механической характеристики между мягкой и жесткой. Такой
Иногда желательна промежуточная форма механической характеристики между мягкой и жесткой. Такой
Свойства и характеристики двигателей смешанного возбуждения
В двигателях смешаного возбуждения магнитный
Свойства и характеристики двигателей смешанного возбуждения
В двигателях смешаного возбуждения магнитный
Поэтому механическая характеристика 1 (рис. 9.9, б) ДПТ смешанного возбуждения располагается
Поэтому механическая характеристика 1 (рис. 9.9, б) ДПТ смешанного возбуждения располагается
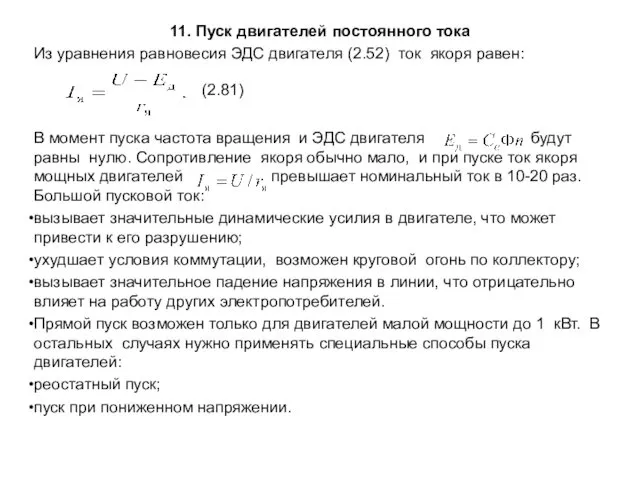
11. Пуск двигателей постоянного тока
Из уравнения равновесия ЭДС двигателя (2.52) ток
11. Пуск двигателей постоянного тока
Из уравнения равновесия ЭДС двигателя (2.52) ток
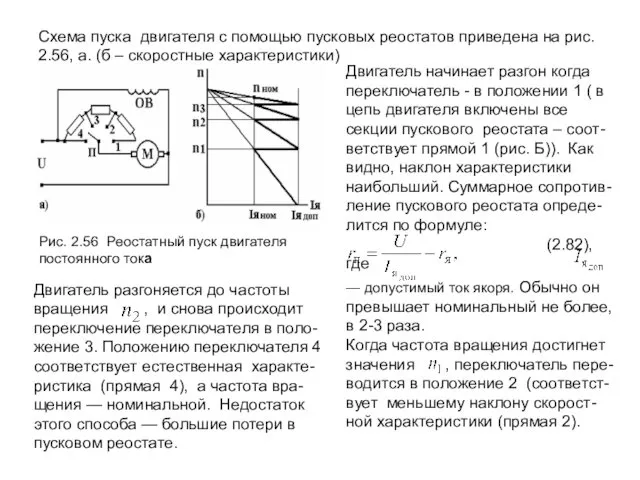
Схема пуска двигателя с помощью пусковых реостатов приведена на рис. 2.56, а.
Схема пуска двигателя с помощью пусковых реостатов приведена на рис. 2.56, а.
Поэтому в двигателях большой мощности применяют пуск при пониженном напряжении.
Для
Поэтому в двигателях большой мощности применяют пуск при пониженном напряжении.
Для
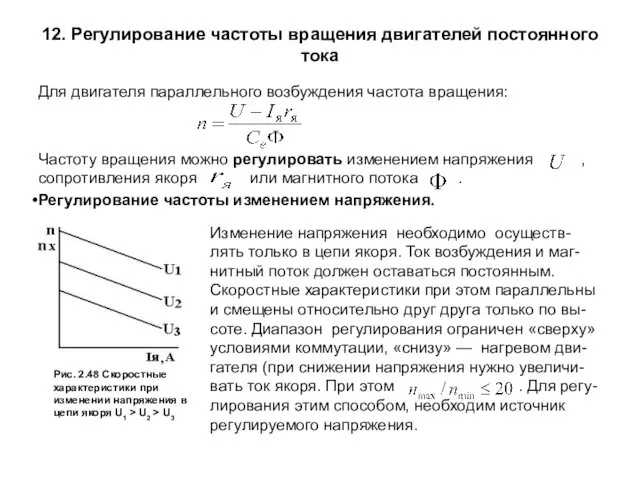
12. Регулирование частоты вращения двигателей постоянного тока
Для двигателя параллельного возбуждения частота
12. Регулирование частоты вращения двигателей постоянного тока
Для двигателя параллельного возбуждения частота
Регулирование частоты вращения изменением сопротивления якорной цепи:
Частота вращения холостого хода не
Регулирование частоты вращения изменением сопротивления якорной цепи:
Частота вращения холостого хода не
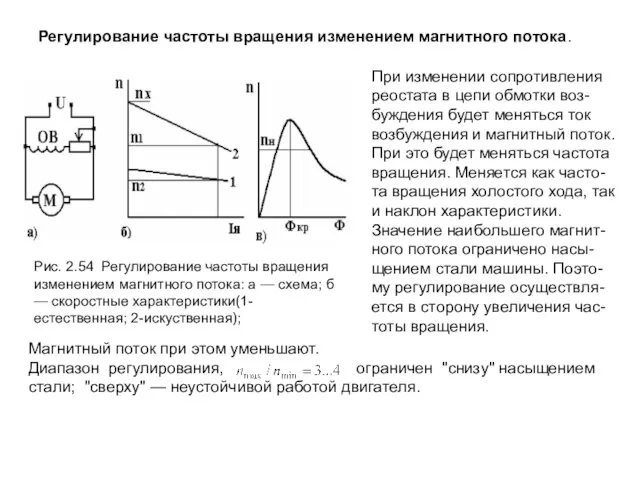
Регулирование частоты вращения изменением магнитного потока.
Рис. 2.54 Регулирование частоты вращения
Регулирование частоты вращения изменением магнитного потока.
Рис. 2.54 Регулирование частоты вращения
25. Торможение двигателей постоянного тока
Для того остановить рабочую машину, наряду с
25. Торможение двигателей постоянного тока
Для того остановить рабочую машину, наряду с
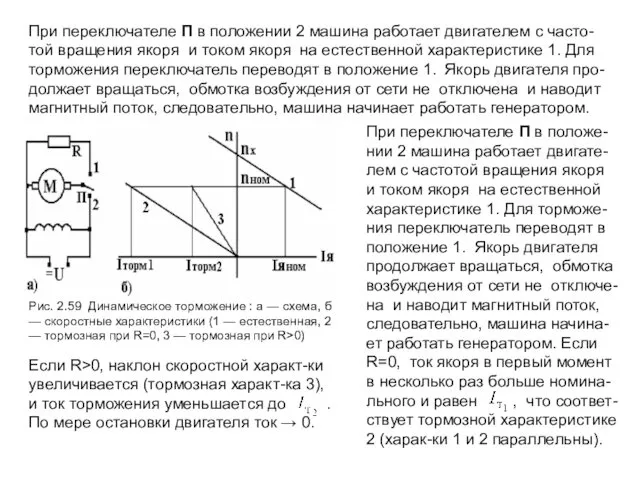
При переключателе П в положении 2 машина работает двигателем с часто-той
При переключателе П в положении 2 машина работает двигателем с часто-той
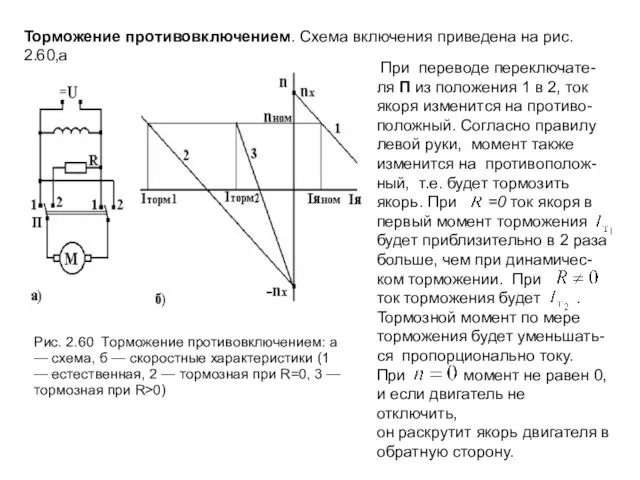
Торможение противовключением. Схема включения приведена на рис. 2.60,а
Рис. 2.60 Торможение
Торможение противовключением. Схема включения приведена на рис. 2.60,а
Рис. 2.60 Торможение
Практическое задание
Паспортные данные электродвигателя постоянного тока параллельного возбуждения:
тип двигателя 2ПФ315L
Рном=2,4 кВт
Uном=220В
nном=1500
Практическое задание
Паспортные данные электродвигателя постоянного тока параллельного возбуждения:
тип двигателя 2ПФ315L
Рном=2,4 кВт
Uном=220В
nном=1500
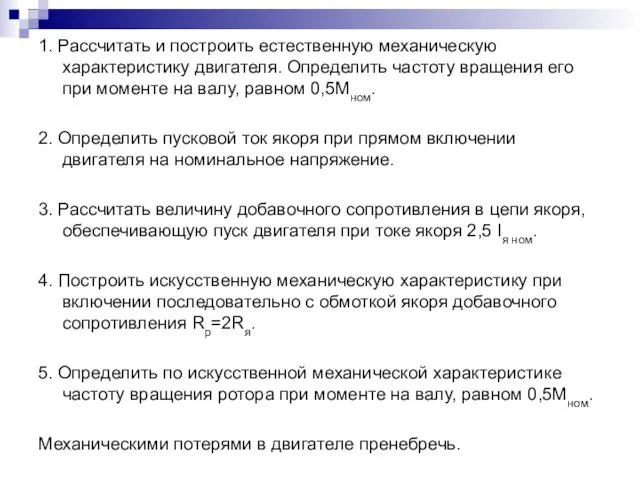
1. Рассчитать и построить естественную механическую характеристику двигателя. Определить частоту вращения
1. Рассчитать и построить естественную механическую характеристику двигателя. Определить частоту вращения
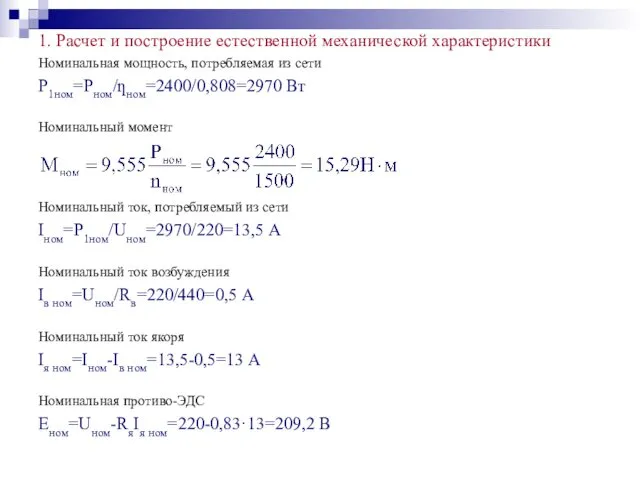
1. Расчет и построение естественной механической характеристики
Номинальная мощность, потребляемая из сети
Р1ном=Рном/ƞном=2400/0,808=2970
1. Расчет и построение естественной механической характеристики
Номинальная мощность, потребляемая из сети
Р1ном=Рном/ƞном=2400/0,808=2970
Механическая характеристика n(M) – прямая линия, ее можно построить по двум
Механическая характеристика n(M) – прямая линия, ее можно построить по двум
Частота вращения ротора при моменте на валу, равном 0,5Мном
n(0,5 Мном)=(nх+nном)/2=(1573,4+1500)/2=1536,7 об/мин
Частота вращения ротора при моменте на валу, равном 0,5Мном
n(0,5 Мном)=(nх+nном)/2=(1573,4+1500)/2=1536,7 об/мин
2. При прямом пуске двигателя без пускового реостата
в первый момент
2. При прямом пуске двигателя без пускового реостата
в первый момент
4. Расчет и построение искусственной механической характеристики
По условию Rр=2Rя ном, следовательно
4. Расчет и построение искусственной механической характеристики
По условию Rр=2Rя ном, следовательно
5. Частота вращения ротора при моменте на валу, равном 0,5Мном
n(0,5 Мном)=(nх+nном)/2=(1573,4+1345,3)/2=1459,35
5. Частота вращения ротора при моменте на валу, равном 0,5Мном
n(0,5 Мном)=(nх+nном)/2=(1573,4+1345,3)/2=1459,35
Задачи для самостоятельного решения
1. Рассчитать и построить естественную механическую характеристику двигателя.
Задачи для самостоятельного решения
1. Рассчитать и построить естественную механическую характеристику двигателя.
Двигатели постоянного тока серий 2ПН и 2ПФ.
Двигатели постоянного тока серий 2ПН и 2ПФ.
 Факультет Принттехнологий и медиакоммуникаций БГТУ. Кафедра редакционно-издательских технологий
Факультет Принттехнологий и медиакоммуникаций БГТУ. Кафедра редакционно-издательских технологий День пожилого человека
День пожилого человека Методика развития связной речи.
Методика развития связной речи. Проектирование котлованов. (Лекция 11)
Проектирование котлованов. (Лекция 11) Строение органических соединений. Кислотно-основные свойства органических соединений
Строение органических соединений. Кислотно-основные свойства органических соединений Экономическая теория, как наука. (Тема 1)
Экономическая теория, как наука. (Тема 1) Экономикалық термндер
Экономикалық термндер Термохимия. Расчетные задачи. (Лекция 4.2)
Термохимия. Расчетные задачи. (Лекция 4.2) Презентация Скоро в школу
Презентация Скоро в школу Технологические возможности и преимущества станков с ЧПУ
Технологические возможности и преимущества станков с ЧПУ Трансплантация поджелудочной железы
Трансплантация поджелудочной железы Портфолио. Афанасьева Ирина Юрьевна
Портфолио. Афанасьева Ирина Юрьевна Шаблон для презентации PowerPoint Гидросфера
Шаблон для презентации PowerPoint Гидросфера Введение в ортодонтию
Введение в ортодонтию Весёлые раскраски.
Весёлые раскраски. Московская библейская церковь
Московская библейская церковь 3GPP Long Term Evolution (LTE). Обзор физического уровня
3GPP Long Term Evolution (LTE). Обзор физического уровня Спутниковое Т.В ПАО Мобильные ТелеСистемы,
Спутниковое Т.В ПАО Мобильные ТелеСистемы, Диагностика и интерпретация детского рисунка
Диагностика и интерпретация детского рисунка организация проектной и исследовательской деятельности школьников в разных возрастных группах в условиях реализации современных образовательных стандартов.
организация проектной и исследовательской деятельности школьников в разных возрастных группах в условиях реализации современных образовательных стандартов. Технология проблемного диалога
Технология проблемного диалога Презентация Великий русский писатель Гоголь Н.В.
Презентация Великий русский писатель Гоголь Н.В. Семейный фестиваль Остаёмся зимовать
Семейный фестиваль Остаёмся зимовать Від малюка до школяра
Від малюка до школяра Дети в великую отечественную войну
Дети в великую отечественную войну Обособленные обстоятельства, выраженные одиночными деепричастиями и деепричастными оборотами
Обособленные обстоятельства, выраженные одиночными деепричастиями и деепричастными оборотами Интернет-журнал Звезда
Интернет-журнал Звезда С 8 марта. Букет котов
С 8 марта. Букет котов