- Математика в компьютерной графике

Содержание
- 2. Базовые понятия свободные векторы, радиус векторы, операции с векторами, скалярное и векторное произведение векторов (vector dot
- 3. Преобразования (transformations) Аффинные Перспективные Билинейные
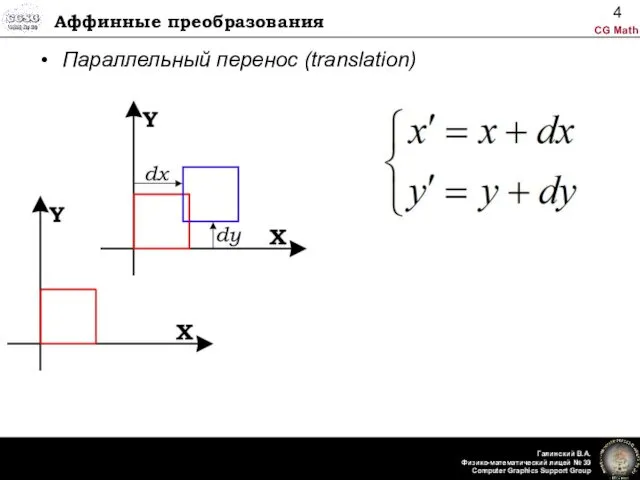
- 4. Аффинные преобразования Параллельный перенос (translation)
- 5. Аффинные преобразования Масштабирование (scaling)
- 6. Аффинные преобразования Сдвиг (shearing)
- 7. Аффинные преобразования Масштабирование (scaling)
- 8. Аффинные преобразования Поворот относительно начала координат (rotation) r
- 9. Матричная запись аффинных преобразований Перепишем в матричном виде общую запись аффинных преобразований:
- 10. Однородные координаты (homogeneous) представим координаты на плоскости (2D) трехкомпонентной вектор - строкой: будем полагать w =
- 11. Матричный вид аффинных преобразований ~ translation ~ translation ~ shear by x ~ shear by y
- 12. Композиция преобразований подвергнем точку последовательным преобразованиям системы координат: перепишем: в силу ассоциативности:
- 13. Обратные аффинные преобразования
- 14. Преобразование точек, векторов и нормалей точка (радиус-вектор) (p): вектор (v) и нормаль (n) (только направление): преобразования:
- 15. Преобразование нормалей
- 16. Нотации записи: столбец или строка Одно преобразование: Композиция преобразований:
- 17. Пример: привязка систем координат заданы точки соответствия найти «матрицу перехода»
- 18. Пример: привязка систем координат
- 19. Пример: преобразование изображений Поворот и масштабирование => Прямое отображение (direct mapping) =>
- 20. Пример: warping (1)
- 21. Пример: warping (2) Аффинные преобразования Билинейные преобразования Перспективные преобразования
- 22. Пример: warping (3) Аффинные преобразования Билинейные преобразования Перспективные преобразования
- 23. Пример: morphing morphing = warping + интерполяция цвета
- 24. Перспективные преобразования
- 25. Привязка с перспективным преобразованием (1) общая формула: прямое отображение: полагаем w=1, итоговая формула для координат:
- 26. Привязка с перспективным преобразованием (2) получаем матрицу обратного отображения определитель присутствует и в числителе и в
- 27. Привязка с перспективным преобразованием (3) Задача привязки: по 4 точкам соответствия определить матрицу перехода:
- 28. Привязка с перспективным преобразованием (4) запишем зависимость (выразим координаты x и y): выпишем в матричной форме
- 29. Привязка с перспективным преобразованием (5) для упрощения задачи переход ищем из единичного квадрата: получаем:
- 30. Привязка с перспективным преобразованием (6) обозначаем: и находим решение:
- 31. Аффинные преобразования в пространстве Аналогично случаю 2D вводим однородные координаты: и преобразования в общем случае:
- 32. Матрицы 3D преобразований (перенос, масштаб) ~ translation ~ scaling
- 33. Матрицы 3D преобразований (поворот вокруг осей) ~ rotation
- 34. Матрицы 3D преобразований (поворот вокруг оси) Поворот вокруг произвольной оси, проходящей через начало координат. Ось задается
- 35. Пример: построение матрицы камеры (1) камера задается: позиция С и векторы направление «вверх» V, «враво» U
- 36. Пример: построение матрицы камеры (2) после преобразования вектора отобразятся: т.е.
- 37. Пример: построение матрицы камеры (3) зная находим
- 39. Скачать презентацию
Базовые понятия
свободные векторы, радиус векторы, операции с векторами, скалярное и векторное
Базовые понятия
свободные векторы, радиус векторы, операции с векторами, скалярное и векторное

Преобразования (transformations)
Аффинные
Перспективные
Билинейные
Преобразования (transformations)
Аффинные
Перспективные
Билинейные
Аффинные преобразования
Параллельный перенос (translation)
Аффинные преобразования
Параллельный перенос (translation)
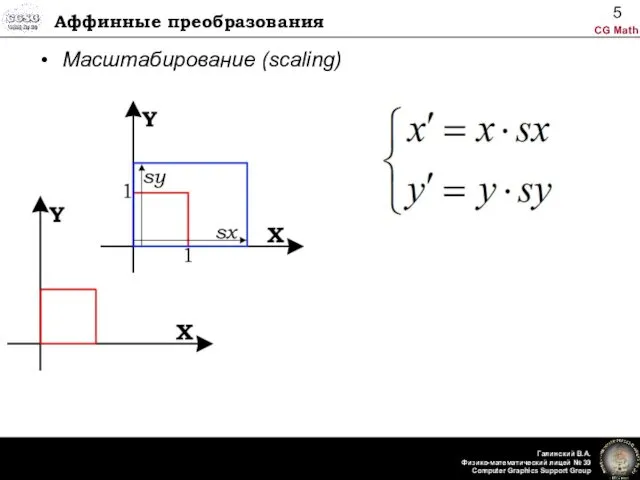
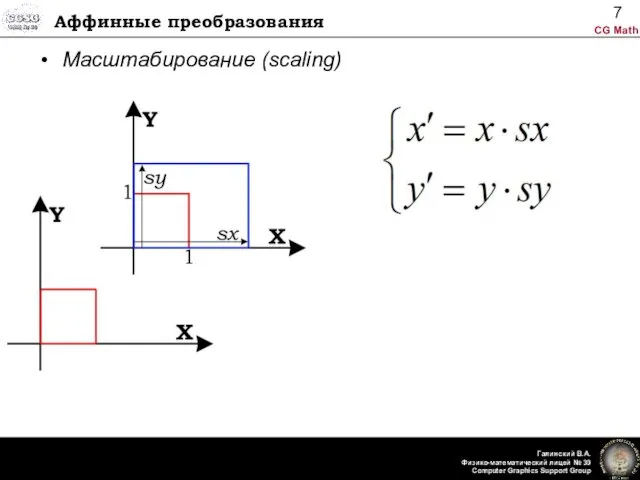
Аффинные преобразования
Масштабирование (scaling)
Аффинные преобразования
Масштабирование (scaling)
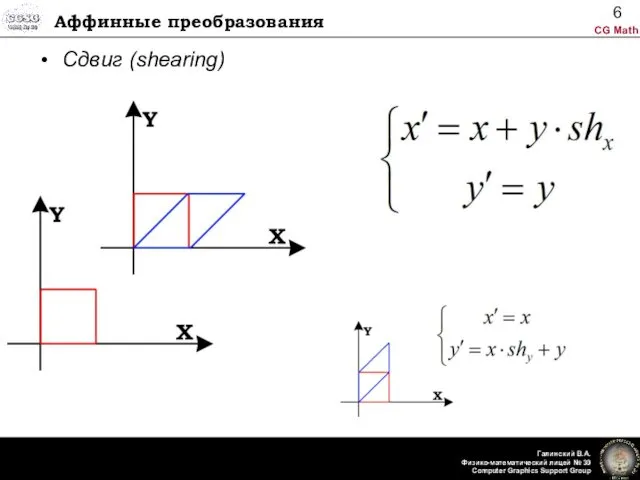
Аффинные преобразования
Сдвиг (shearing)
Аффинные преобразования
Сдвиг (shearing)
Аффинные преобразования
Масштабирование (scaling)
Аффинные преобразования
Масштабирование (scaling)
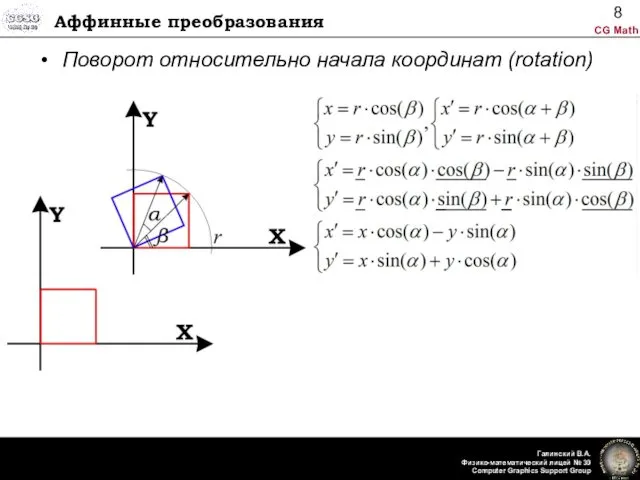
Аффинные преобразования
Поворот относительно начала координат (rotation)
r
Аффинные преобразования
Поворот относительно начала координат (rotation)
r
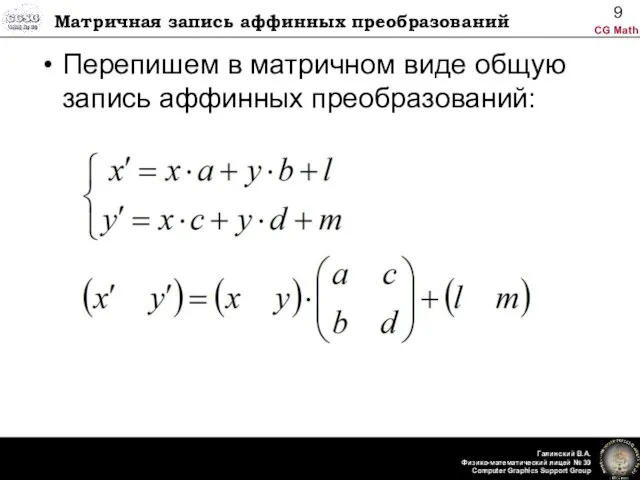
Матричная запись аффинных преобразований
Перепишем в матричном виде общую запись аффинных преобразований:
Матричная запись аффинных преобразований
Перепишем в матричном виде общую запись аффинных преобразований:
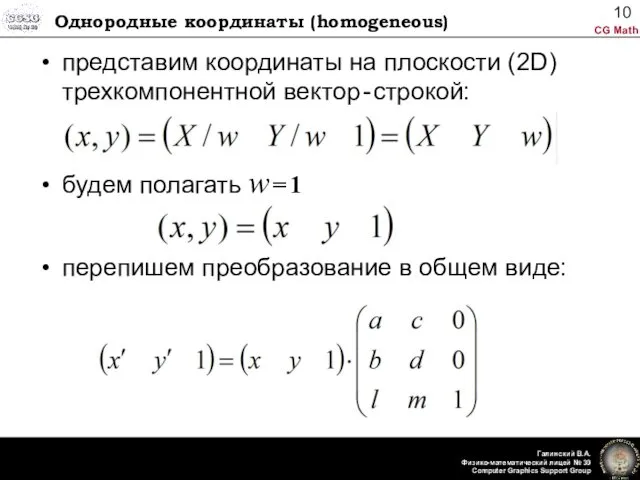
Однородные координаты (homogeneous)
представим координаты на плоскости (2D) трехкомпонентной вектор - строкой:
будем
Однородные координаты (homogeneous)
представим координаты на плоскости (2D) трехкомпонентной вектор - строкой:
будем
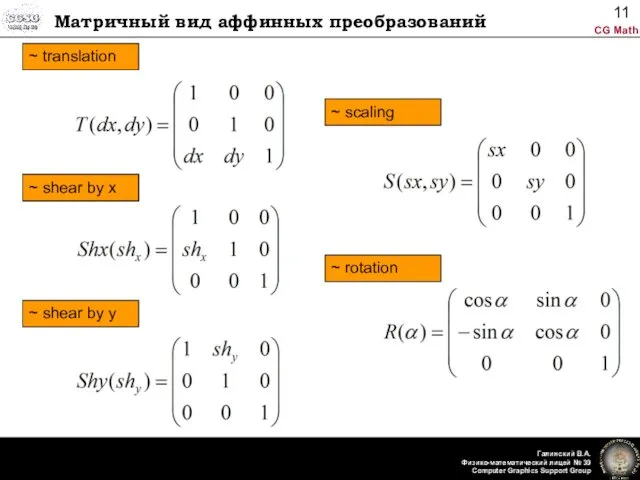
Матричный вид аффинных преобразований
~ translation
~ translation
~ shear by x
~ shear by
Матричный вид аффинных преобразований
~ translation
~ translation
~ shear by x
~ shear by
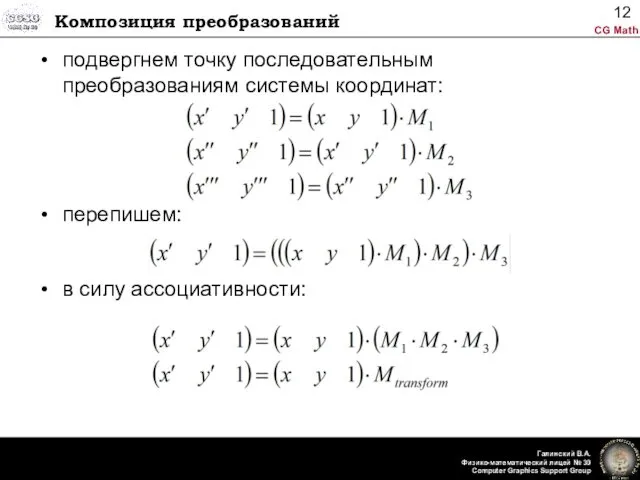
Композиция преобразований
подвергнем точку последовательным преобразованиям системы координат:
перепишем:
в силу ассоциативности:
Композиция преобразований
подвергнем точку последовательным преобразованиям системы координат:
перепишем:
в силу ассоциативности:
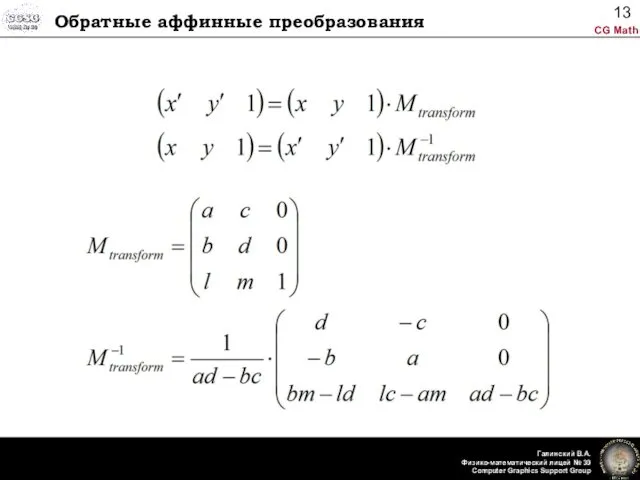
Обратные аффинные преобразования
Обратные аффинные преобразования
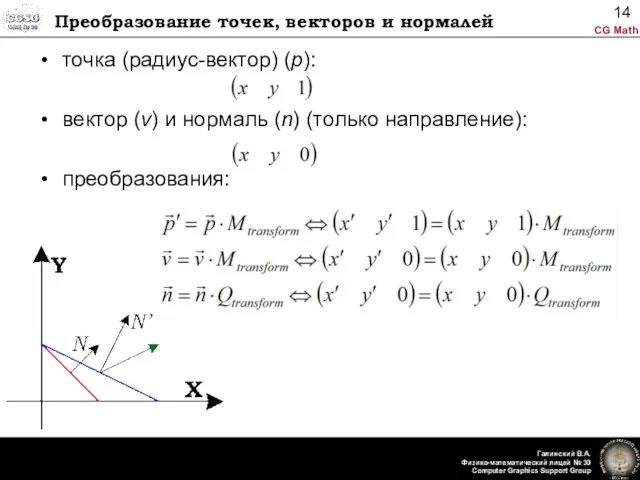
Преобразование точек, векторов и нормалей
точка (радиус-вектор) (p):
вектор (v) и нормаль (n)
Преобразование точек, векторов и нормалей
точка (радиус-вектор) (p):
вектор (v) и нормаль (n)
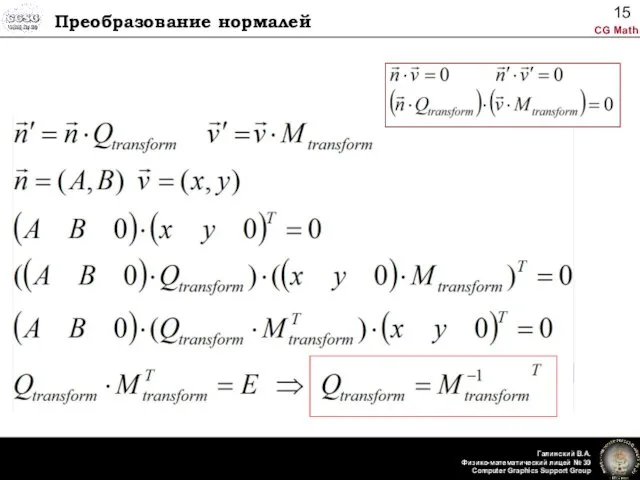
Преобразование нормалей
Преобразование нормалей
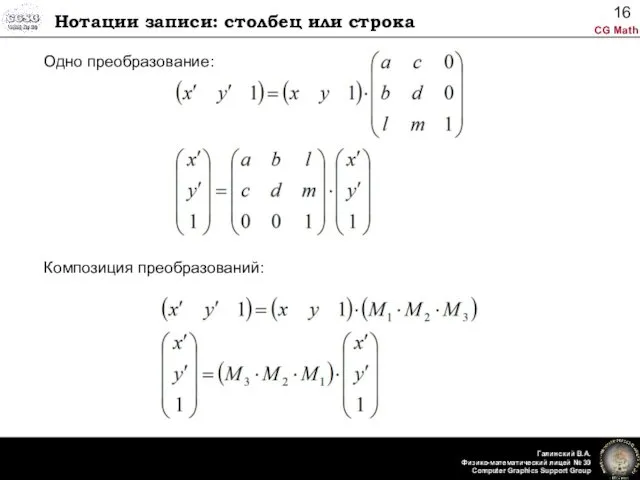
Нотации записи: столбец или строка
Одно преобразование:
Композиция преобразований:
Нотации записи: столбец или строка
Одно преобразование:
Композиция преобразований:
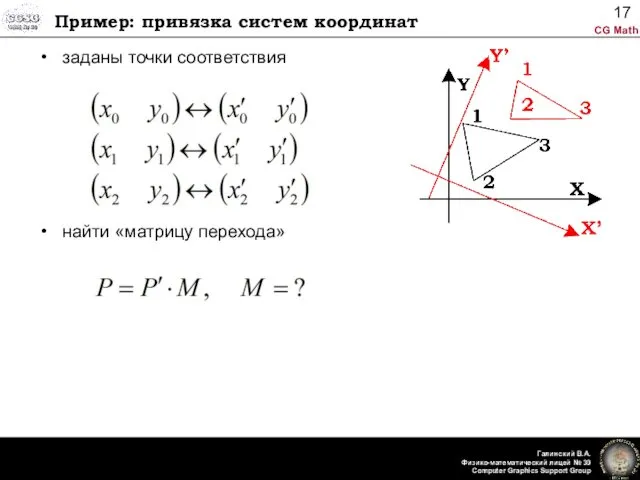
Пример: привязка систем координат
заданы точки соответствия
найти «матрицу перехода»
Пример: привязка систем координат
заданы точки соответствия
найти «матрицу перехода»
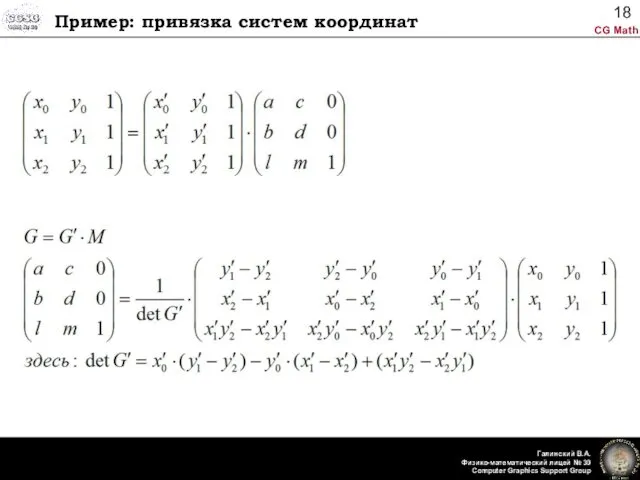
Пример: привязка систем координат
Пример: привязка систем координат
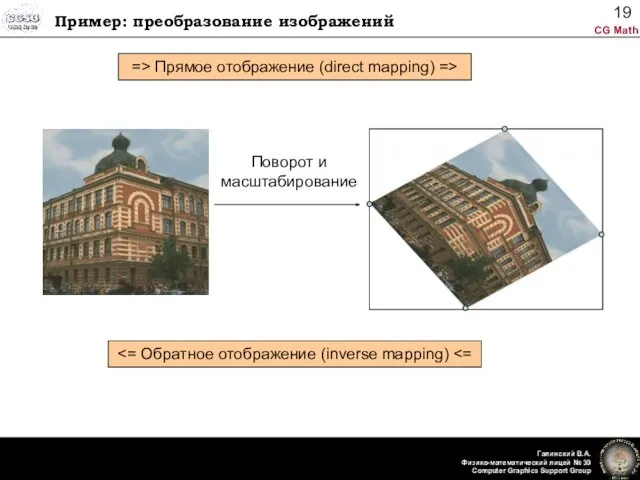
Пример: преобразование изображений
Поворот и
масштабирование
=> Прямое отображение (direct mapping) =>
<= Обратное отображение
Пример: преобразование изображений
Поворот и
масштабирование
=> Прямое отображение (direct mapping) =>
<= Обратное отображение
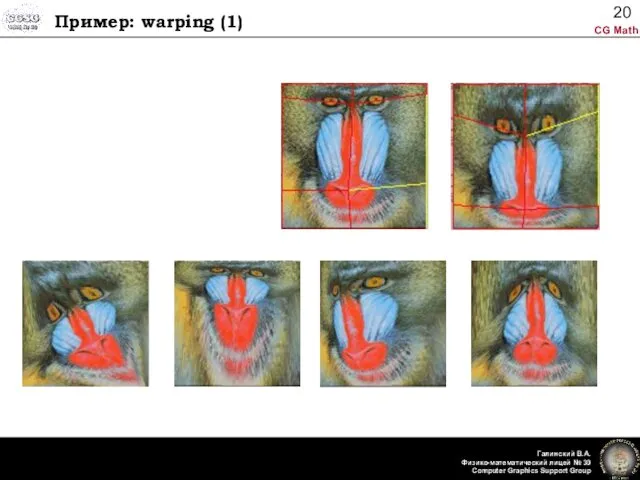
Пример: warping (1)
Пример: warping (1)
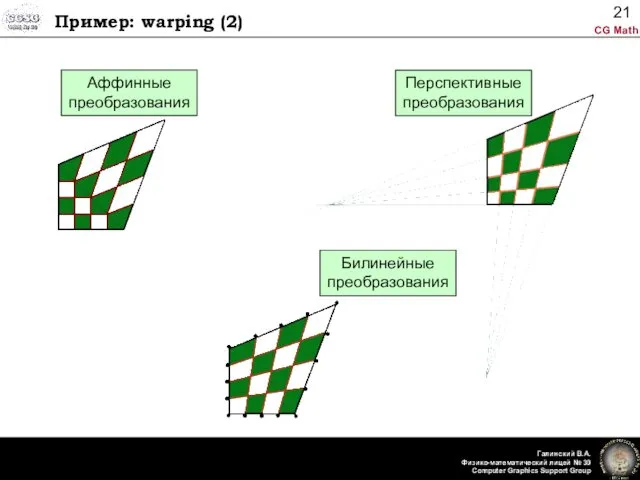
Пример: warping (2)
Аффинные
преобразования
Билинейные
преобразования
Перспективные
преобразования
Пример: warping (2)
Аффинные
преобразования
Билинейные
преобразования
Перспективные
преобразования
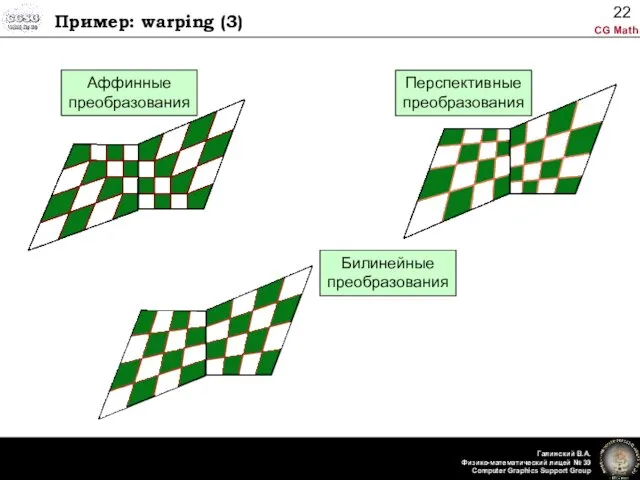
Пример: warping (3)
Аффинные
преобразования
Билинейные
преобразования
Перспективные
преобразования
Пример: warping (3)
Аффинные
преобразования
Билинейные
преобразования
Перспективные
преобразования
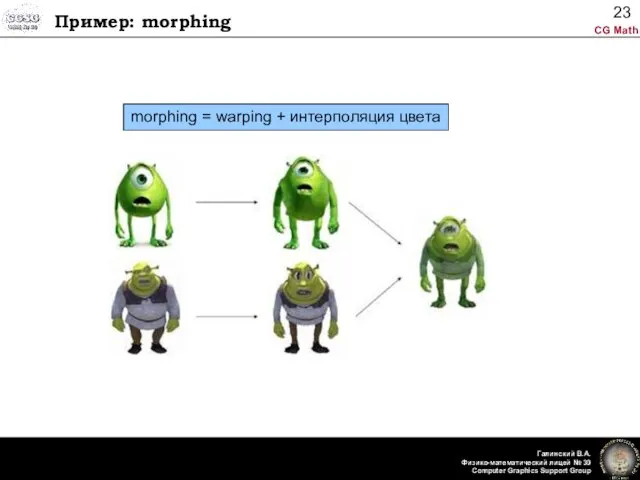
Пример: morphing
morphing = warping + интерполяция цвета
Пример: morphing
morphing = warping + интерполяция цвета
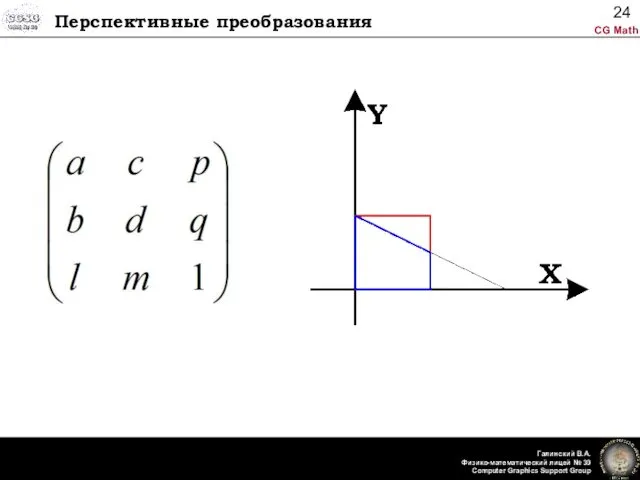
Перспективные преобразования
Перспективные преобразования
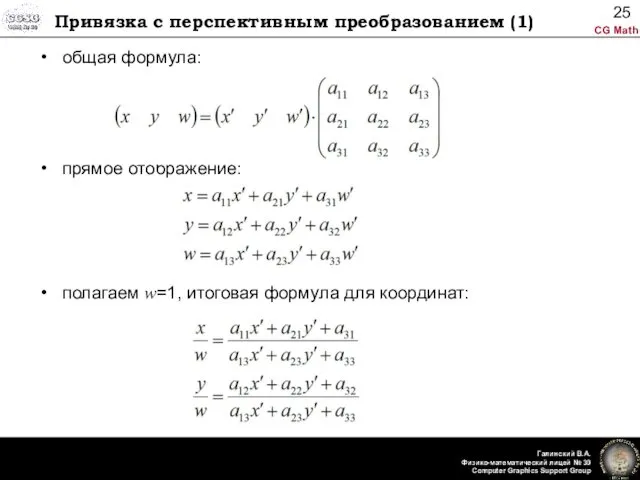
Привязка с перспективным преобразованием (1)
общая формула:
прямое отображение:
полагаем w=1, итоговая формула для
Привязка с перспективным преобразованием (1)
общая формула:
прямое отображение:
полагаем w=1, итоговая формула для
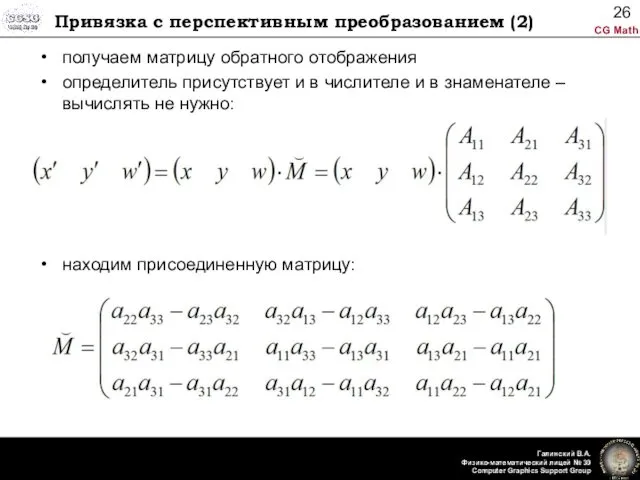
Привязка с перспективным преобразованием (2)
получаем матрицу обратного отображения
определитель присутствует и в
Привязка с перспективным преобразованием (2)
получаем матрицу обратного отображения
определитель присутствует и в
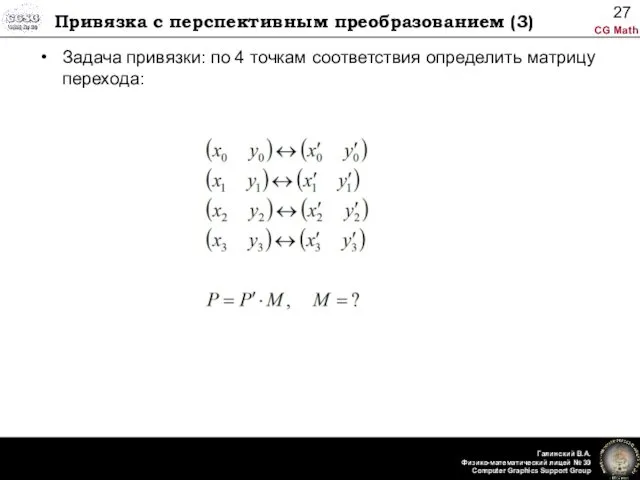
Привязка с перспективным преобразованием (3)
Задача привязки: по 4 точкам соответствия определить
Привязка с перспективным преобразованием (3)
Задача привязки: по 4 точкам соответствия определить
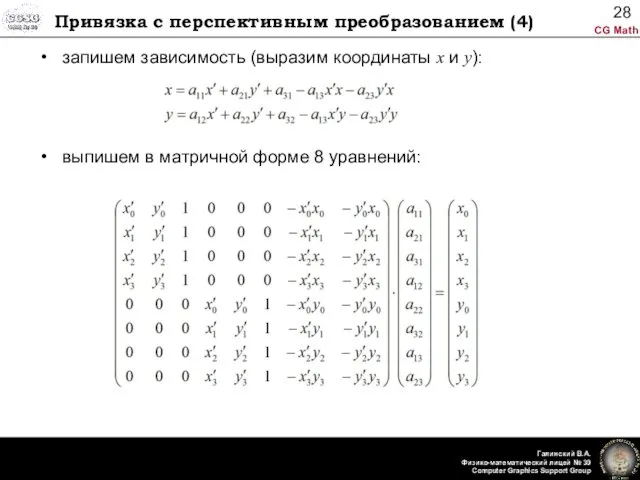
Привязка с перспективным преобразованием (4)
запишем зависимость (выразим координаты x и y):
выпишем
Привязка с перспективным преобразованием (4)
запишем зависимость (выразим координаты x и y):
выпишем
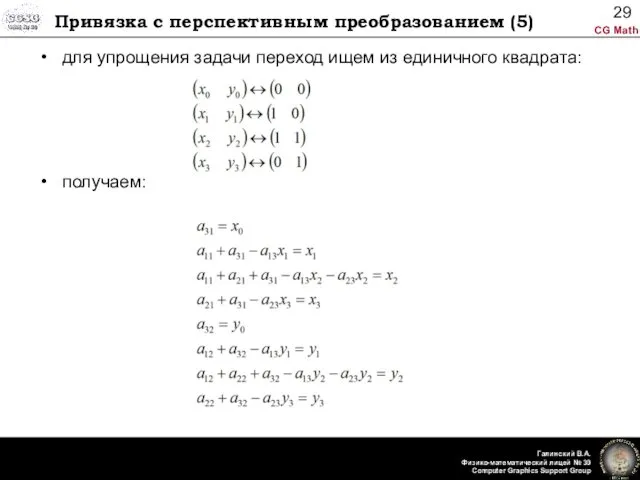
Привязка с перспективным преобразованием (5)
для упрощения задачи переход ищем из единичного
Привязка с перспективным преобразованием (5)
для упрощения задачи переход ищем из единичного
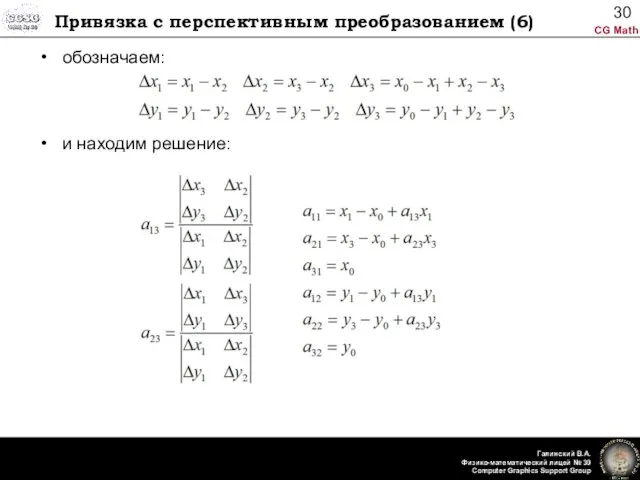
Привязка с перспективным преобразованием (6)
обозначаем:
и находим решение:
Привязка с перспективным преобразованием (6)
обозначаем:
и находим решение:
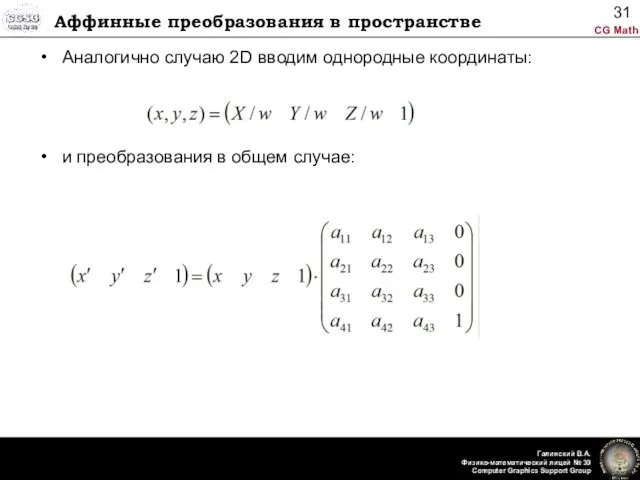
Аффинные преобразования в пространстве
Аналогично случаю 2D вводим однородные координаты:
и преобразования в
Аффинные преобразования в пространстве
Аналогично случаю 2D вводим однородные координаты:
и преобразования в
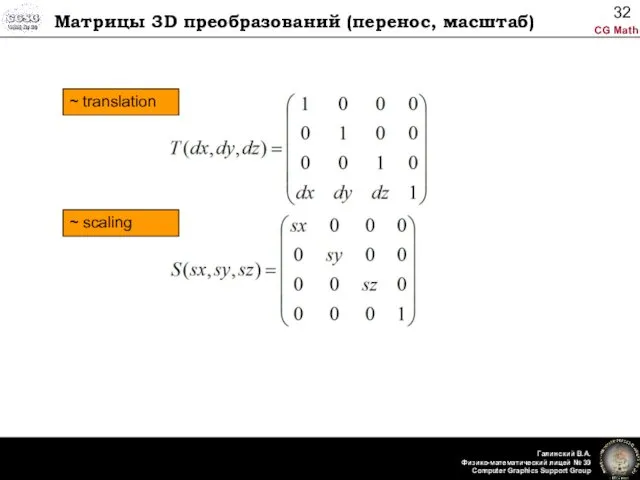
Матрицы 3D преобразований (перенос, масштаб)
~ translation
~ scaling
Матрицы 3D преобразований (перенос, масштаб)
~ translation
~ scaling
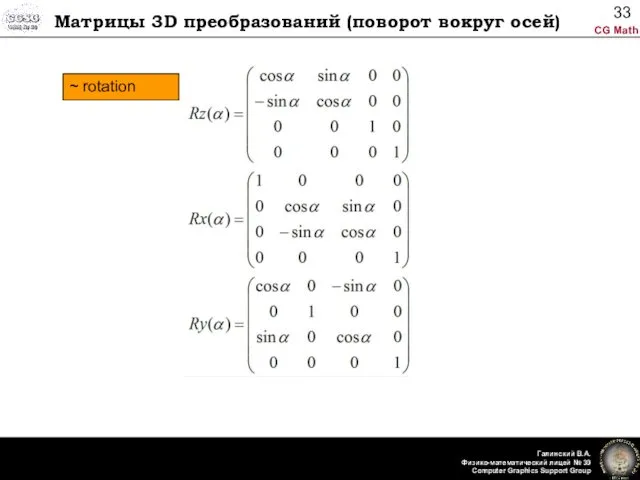
Матрицы 3D преобразований (поворот вокруг осей)
~ rotation
Матрицы 3D преобразований (поворот вокруг осей)
~ rotation
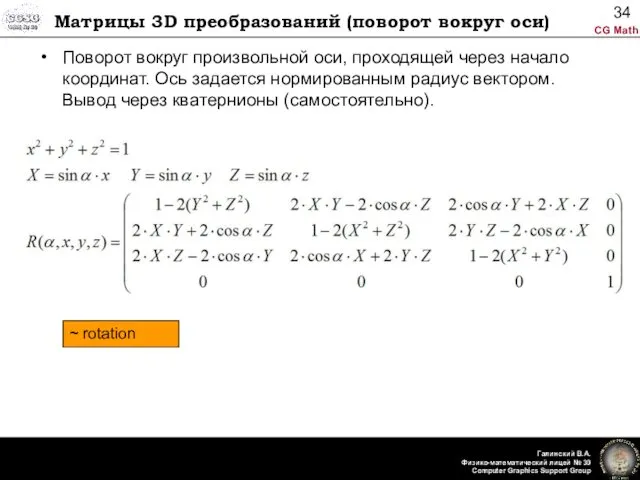
Матрицы 3D преобразований (поворот вокруг оси)
Поворот вокруг произвольной оси, проходящей через
Матрицы 3D преобразований (поворот вокруг оси)
Поворот вокруг произвольной оси, проходящей через
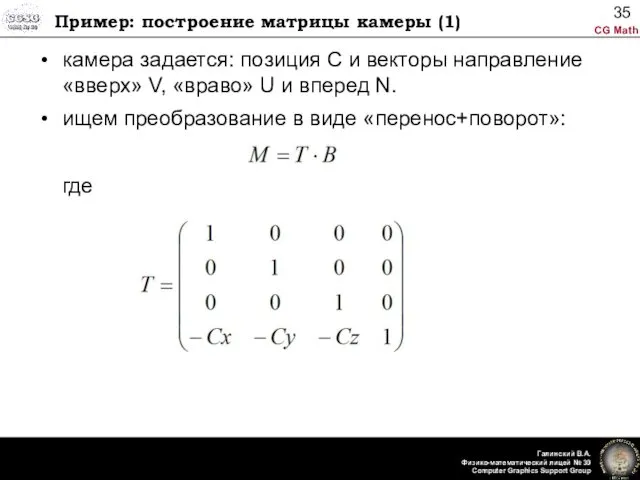
Пример: построение матрицы камеры (1)
камера задается: позиция С и векторы направление
Пример: построение матрицы камеры (1)
камера задается: позиция С и векторы направление
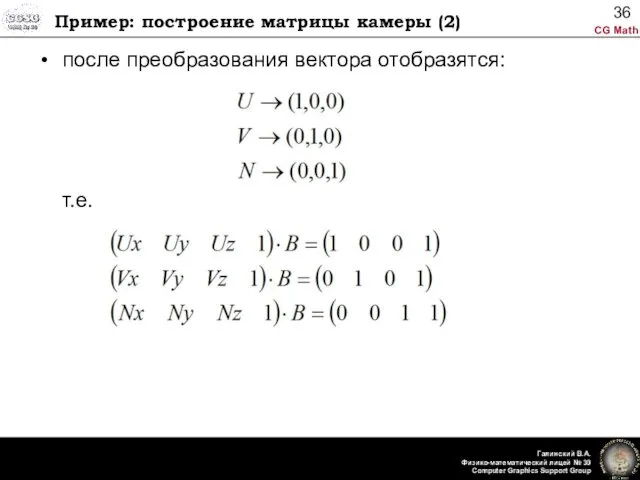
Пример: построение матрицы камеры (2)
после преобразования вектора отобразятся:
т.е.
Пример: построение матрицы камеры (2)
после преобразования вектора отобразятся:
т.е.
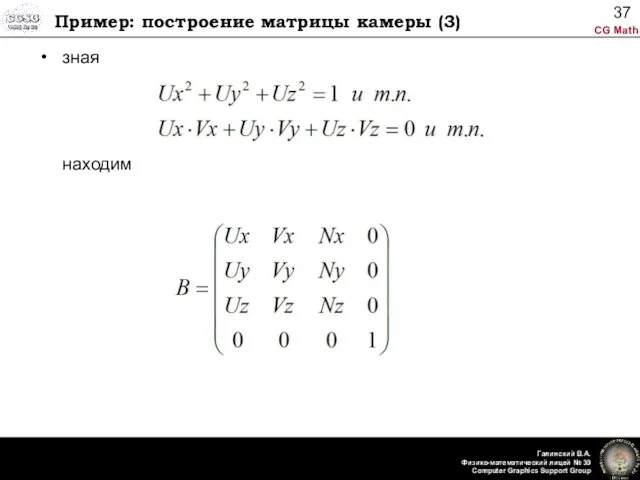
Пример: построение матрицы камеры (3)
зная
находим
Пример: построение матрицы камеры (3)
зная
находим
 Оценка готовности детей к школе
Оценка готовности детей к школе Проектно-исследовательская работа по теме Мороженое-польза или вред?
Проектно-исследовательская работа по теме Мороженое-польза или вред? Тема 3. Товарне виробництво. Товар і гроші. Лекція 2: Вартість товару, еволюція форм вартості
Тема 3. Товарне виробництво. Товар і гроші. Лекція 2: Вартість товару, еволюція форм вартості Полупроводниковые лазеры
Полупроводниковые лазеры Основы духовно-нравственной культуры народов России. 5 класс
Основы духовно-нравственной культуры народов России. 5 класс Сорочечные и платьевые ткани
Сорочечные и платьевые ткани Энергоэффективный дом с минимальным потреблением энергии
Энергоэффективный дом с минимальным потреблением энергии Рентгенодиагностика и дифференциальная диагностика частных форм туберкулеза. Великий Р. Кох и его палочки
Рентгенодиагностика и дифференциальная диагностика частных форм туберкулеза. Великий Р. Кох и его палочки Сварка алюминия и его сплавов
Сварка алюминия и его сплавов Теория отраслевых рынков (разделы курса)
Теория отраслевых рынков (разделы курса) Презентация Пальчики играют - речь нам развивают
Презентация Пальчики играют - речь нам развивают О примерных требованиях к дополнительным общеобразовательным общеразвивающим программам
О примерных требованиях к дополнительным общеобразовательным общеразвивающим программам Решение квадратных уравнений. Интеллектуальный марафон
Решение квадратных уравнений. Интеллектуальный марафон Какие разные профессии
Какие разные профессии презентация Нобелевские лауреаты
презентация Нобелевские лауреаты Основы информационной безопасности. Категории нарушителей ИБ. (Тема 3.2)
Основы информационной безопасности. Категории нарушителей ИБ. (Тема 3.2) Презентация Их именами названы улицы нашего города
Презентация Их именами названы улицы нашего города Послание к Евреям
Послание к Евреям Сайт ОмГМУ
Сайт ОмГМУ Уильям Шекспир
Уильям Шекспир Психогеометрический тест (Сьюзен Деллингер)
Психогеометрический тест (Сьюзен Деллингер) Внеклассное мероприятие для учащихся 5 класса Осенние посиделки Диск
Внеклассное мероприятие для учащихся 5 класса Осенние посиделки Диск Вкусы и запахи
Вкусы и запахи Ғылыми ізденІс жұмыстарының құрылымы
Ғылыми ізденІс жұмыстарының құрылымы Северо-Западный федеральный округ России
Северо-Западный федеральный округ России فناوری نانو در روسازی
فناوری نانو در روسازی Компания Intelligent Network Solution
Компания Intelligent Network Solution Структура микропроцессорной системы управления. Особенности цифрового управления техническими процессами
Структура микропроцессорной системы управления. Особенности цифрового управления техническими процессами